AI笔记: 数学基础之方向导数的计算和梯度
方向导数
定理
- 若函数f(x,y,z)在点P(x,y,z)处可微,沿任意方向l的方向导数
- ∂f∂l=∂f∂xcosα+∂f∂ycosβ+∂f∂zcosγ\frac{\partial f}{\partial l} = \frac{\partial f}{\partial x} cos \alpha + \frac{\partial f}{\partial y} cos \beta + \frac{\partial f}{\partial z} cos \gamma∂l∂f=∂x∂fcosα+∂y∂fcosβ+∂z∂fcosγ
- 其中α,β,γ\alpha, \beta, \gammaα,β,γ 为l的方向角
- 证明
- 由函数f(x,y,z)f(x,y,z)f(x,y,z)在点P可微
- △f=∂f∂x△x+∂f∂y△y+∂f∂z△z+o(ρ)\triangle f = \frac{\partial f}{\partial x} \triangle x + \frac{\partial f}{\partial y} \triangle y + \frac{\partial f}{\partial z} \triangle z + o(\rho)△f=∂x∂f△x+∂y∂f△y+∂z∂f△z+o(ρ)
- =ρ(∂f∂xcosα+∂f∂ycosβ+∂f∂zcosγ)+o(ρ)= \rho(\frac{\partial f}{\partial x} cos \alpha + \frac{\partial f}{\partial y} cos \beta + \frac{\partial f}{\partial z} cos \gamma) + o(\rho)=ρ(∂x∂fcosα+∂y∂fcosβ+∂z∂fcosγ)+o(ρ)
- ∂f∂l=limρ→0△fρ=∂f∂xcosα+∂f∂ycosβ+∂f∂zcosγ\frac{\partial f}{\partial l} = \lim_{\rho \to 0} \frac{\triangle f}{\rho} = \frac{\partial f}{\partial x} cos \alpha + \frac{\partial f}{\partial y} cos \beta + \frac{\partial f}{\partial z} cos \gamma∂l∂f=limρ→0ρ△f=∂x∂fcosα+∂y∂fcosβ+∂z∂fcosγ
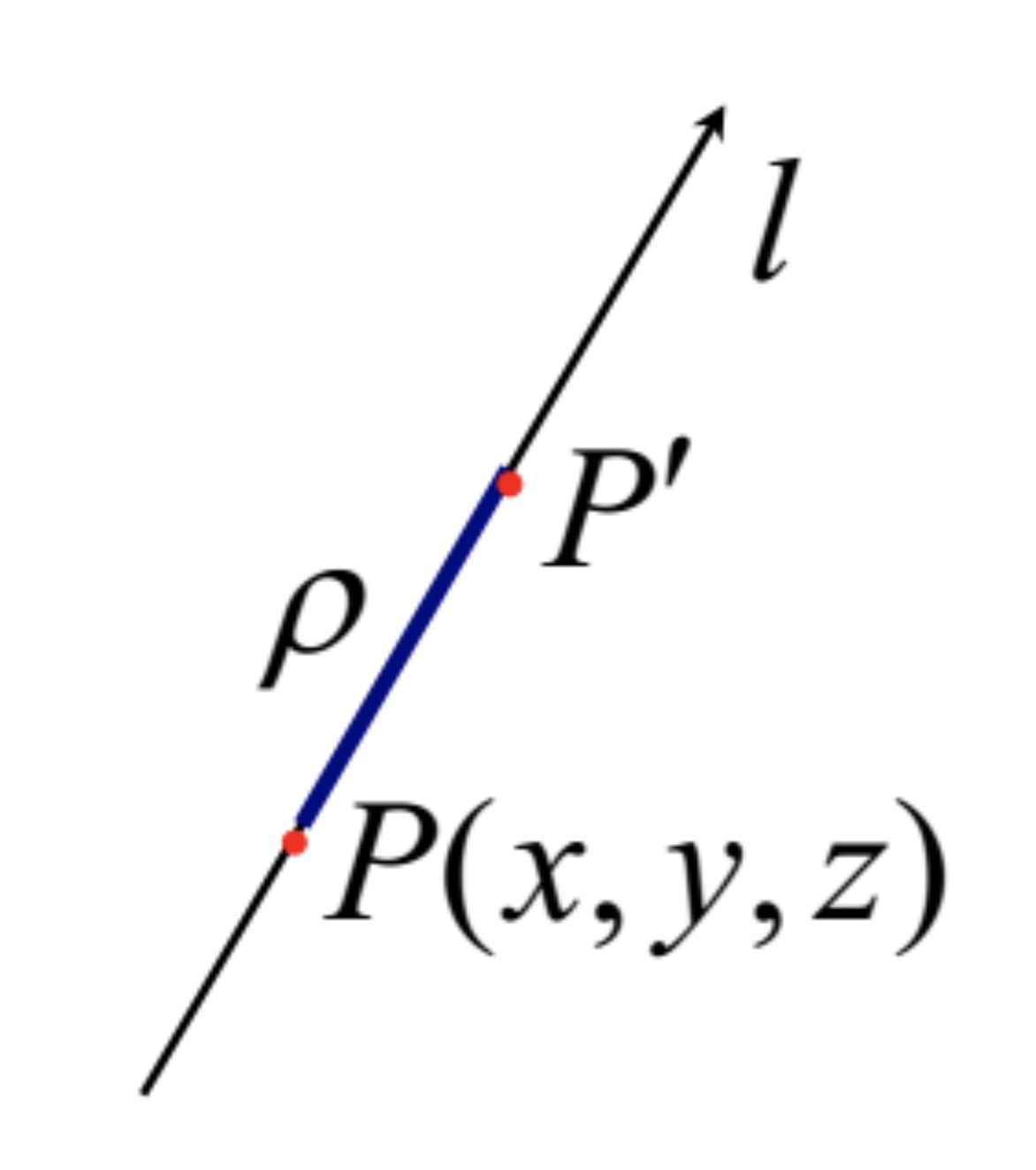
- 对于二元函数f(x,y)在点P(x,y)处沿着方向l(方向角为α,β\alpha, \betaα,β)的方向导数为
- ∂f∂l=limρ→0f(x+△x,y+△y)−f(x,y)ρ=fx′(x,y)cosα+fy′(x,y)cosβ\frac{\partial f}{\partial l} = \lim_{\rho \to 0} \frac{f(x+\triangle x, y + \triangle y) - f(x,y)}{\rho} = f_x'(x,y)cos \alpha + f_y'(x,y) cos \beta∂l∂f=limρ→0ρf(x+△x,y+△y)−f(x,y)=fx′(x,y)cosα+fy′(x,y)cosβ
- ρ=(△x)2+(△y)2\rho = \sqrt{(\triangle x)^2 + (\triangle y)^2}ρ=(△x)2+(△y)2
- △x=ρcosα\triangle x = \rho cos \alpha△x=ρcosα
- △y=ρcosβ\triangle y = \rho cos \beta△y=ρcosβ
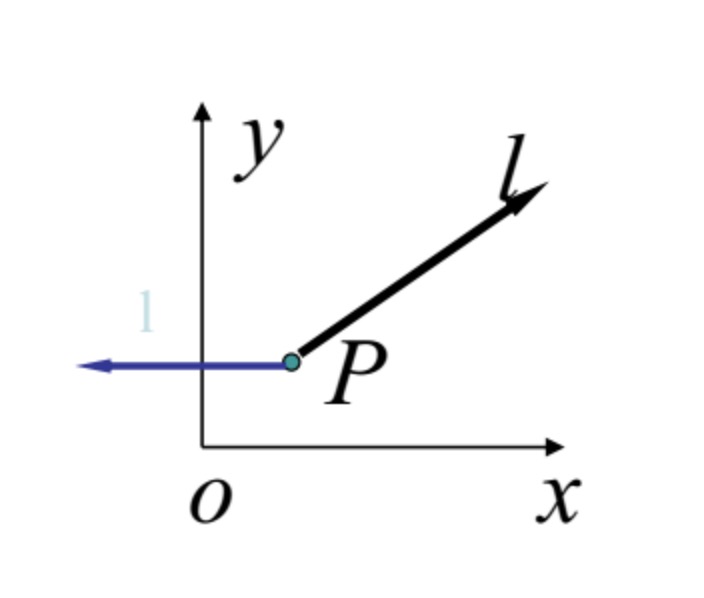
- 特别地
- l与x轴同向(α=0,β=π2\alpha = 0, \beta = \frac{\pi}{2}α=0,β=2π)时,有∂f∂l=∂f∂x\frac{\partial f}{\partial l} = \frac{\partial f}{\partial x}∂l∂f=∂x∂f
- l与x轴反向(α=π,β=π2\alpha = \pi, \beta = \frac{\pi}{2}α=π,β=2π)时,有∂f∂l=−∂f∂x\frac{\partial f}{\partial l} = -\frac{\partial f}{\partial x}∂l∂f=−∂x∂f
方向导数
- 方向导数(directional derivative): 有时不仅仅需要知道函数在坐标轴上的变化率(即偏导数),还需要设法求得函数在其他特定方向上的变化率;
- 而方向导数就是函数在其他特定方向上的变化率。
- 如果函数z=f(x,y)z=f(x,y)z=f(x,y)在点P(x,y)是可微分的,那么,函数在该点沿着任意方向L的方向导数都存在
- 且计算公式为:∂f∂l=∂f∂xcosα+∂f∂ycosβ\frac{\partial f}{\partial l} = \frac{\partial f}{\partial x} cos \alpha + \frac{\partial f}{\partial y} cos \beta∂l∂f=∂x∂fcosα+∂y∂fcosβ

例1
- 求函数u=x2yzu = x^2yzu=x2yz 在点P(1,1,1)沿向量 l⃗=(2,−1,3)\vec{l} = (2, -1, 3)l=(2,−1,3)的方向导数.
- ∂u∂l=∂u∂xcosα+∂u∂ycosβ+∂u∂zcosγ\frac{\partial u}{\partial l} = \frac{\partial u}{\partial x} cos \alpha + \frac{\partial u}{\partial y} cos \beta + \frac{\partial u}{\partial z} cos \gamma∂l∂u=∂x∂ucosα+∂y∂ucosβ+∂z∂ucosγ
- 解
- 向量l⃗\vec{l}l的方向余弦为: cosα=214,cosβ=−114,cosγ=314cos \alpha = \frac{2}{\sqrt{14}}, \cos \beta = \frac{-1}{\sqrt{14}}, cos \gamma = \frac{3}{\sqrt{14}}cosα=142,cosβ=14−1,cosγ=143
- ∂u∂l∣P=(2xyz∗214)−x2z∗114+x2y∗314∣(1,1,1)=614\left. \frac{\partial u}{\partial l} \right|_P = \left. (2xyz * \frac{2}{\sqrt{14}}) - x^2z * \frac{1}{\sqrt{14}} + x^2y * \frac{3}{\sqrt{14}} \right|_{(1,1,1)} = \frac{6}{\sqrt{14}}∂l∂u∣∣P=(2xyz∗142)−x2z∗141+x2y∗143∣∣∣(1,1,1)=146
例2
- 求函数z=xe2yz=xe^{2y}z=xe2y在点P(1,0)处沿从点P(1,0)到点Q(2, -1)的方向的方向导数
- 解
- 方向l即向量PQ=(1,−1)PQ = (1, -1)PQ=(1,−1)的方向,与l同方向的单位向量el=(12,−12).=(cosα,cosβ)e_l = (\frac{1}{\sqrt{2}}, - \frac{1}{\sqrt{2}}). = (cos \alpha, cos \beta)el=(21,−21).=(cosα,cosβ)
- 因函数可微,且∂z∂x∣(1,0)=e2y∣(1,0)=1,∂z∂y∣(1,0)=2xe2y∣(1,0)=2\left. \frac{\partial z}{\partial x} \right|_{(1,0)} = \left. e^{2y} \right|_{(1,0)} = 1, \left. \frac{\partial z}{\partial y} \right|_{(1,0)} = \left. 2xe^{2y} \right|_{(1,0)} = 2∂x∂z∣∣(1,0)=e2y∣∣(1,0)=1,∂y∂z∣∣∣(1,0)=2xe2y∣∣(1,0)=2
- 所以,所求方向导数为:∂z∂l∣(1,0)=1∗12+2∗(−12)=−22\left. \frac{\partial z}{\partial l} \right|_{(1,0)} = 1 * \frac{1}{\sqrt{2}} + 2 * (- \frac{1}{\sqrt{2}}) = - \frac{\sqrt{2}}{2}∂l∂z∣∣(1,0)=1∗21+2∗(−21)=−22
例3
- 求f(x,y,z)=xy+yz+zxf(x,y,z) = xy + yz + zxf(x,y,z)=xy+yz+zx 在点(1,1,2)沿方向l的方向导数,其中l的方向角分别为:60°, 45°, 60°
- 解:
- 与l同方向的单位向量 el=(cos60°,cos45°,cos60°)=(12,22,12)e_l = (cos 60°, cos 45°, cos 60°) = (\frac{1}{2}, \frac{\sqrt{2}}{2}, \frac{1}{2})el=(cos60°,cos45°,cos60°)=(21,22,21)
- 因函数可微,且
- fx′(1,1,2)=(y+z)∣(1,1,2)=3f_x'(1,1,2) = (y + z)|_{(1,1,2)} = 3fx′(1,1,2)=(y+z)∣(1,1,2)=3
- fy′(1,1,2)=(x+z)∣(1,1,2)=3f_y'(1,1,2) = (x + z)|_{(1,1,2)} = 3fy′(1,1,2)=(x+z)∣(1,1,2)=3
- fz′(1,1,2)=(y+x)∣(1,1,2)=2f_z'(1,1,2) = (y + x)|_{(1,1,2)} = 2fz′(1,1,2)=(y+x)∣(1,1,2)=2
- 所以∂f∂l∣(1,1,2)=3∗12+3∗22+2∗12=12(5+32)\frac{\partial f}{\partial l} |_{(1,1,2)} = 3*\frac{1}{2} + 3*\frac{\sqrt{2}}{2} + 2*\frac{1}{2} = \frac{1}{2}(5 + 3\sqrt{2})∂l∂f∣(1,1,2)=3∗21+3∗22+2∗21=21(5+32)
梯度
1 ) 概念
- 在空间的每一个点都可以确定无限多个方向,因此,一个多元函数在某个点也必然有无限多个方向导数.
- 在这无限多个方向导数中,最大的一个(它直接反映了函数在这个点的变化率的数量级)等于多少? 它是沿什么方向达到的?
- 描述这个最大方向导数及其所沿方向的矢量,就是我们所讨论的梯度.
- 梯度是场论里的一个基本概念.所谓"场", 它表示空间区域上某种物理量的一种分布
- 从数学上看,这种分布常常表示为 Ω\OmegaΩ 上的一种数值函数或向量函数
- 能表示为数值函数u=u(x,y,z)的场,称为数量场,如温度场、密度场等
2 ) 方向导数公式
- ∂f∂l=∂f∂xcosα+∂f∂ycosβ+∂f∂zcosγ\frac{\partial f}{\partial l} = \frac{\partial f}{\partial x} cos \alpha + \frac{\partial f}{\partial y} cos \beta + \frac{\partial f}{\partial z} cos \gamma∂l∂f=∂x∂fcosα+∂y∂fcosβ+∂z∂fcosγ
- 令向量 G⃗=(∂f∂x,∂f∂y,∂f∂z)\vec{G} = (\frac{\partial f}{\partial x}, \frac{\partial f}{\partial y}, \frac{\partial f}{\partial z})G=(∂x∂f,∂y∂f,∂z∂f)
- l°⃗=(cosα,cosβ,cosγ)\vec{l°} = (cos \alpha, cos \beta, cos \gamma)l°=(cosα,cosβ,cosγ)
- ∂f∂l=G⃗⋅l°⃗=∣G⃗∣cos(G⃗,l°⃗)(∣l°⃗∣=1)\frac{\partial f}{\partial l} = \vec{G}·\vec{l°} = |\vec{G}|cos(\vec{G}, \vec{l°}) \ \ \ (|\vec{l°}| = 1)∂l∂f=G⋅l°=∣G∣cos(G,l°) (∣l°∣=1)
- 当l°⃗\vec{l°}l°与G⃗\vec{G}G方向一致时,方向导数取最大值:max(∂f∂l)=∣G⃗∣max(\frac{\partial f}{\partial l}) = |\vec{G}|max(∂l∂f)=∣G∣
- 可见:G⃗\vec{G}G
- 方向:f 变化率最大的方向
- 模:f 的最大变化率之值
3 ) 梯度定义
- 向量G⃗\vec{G}G:称为函数f(P)f(P)f(P)在点P处的梯度(gradient), 记做:grad f
- 即 gradf=(∂f∂x,∂f∂y,∂f∂z)=∂f∂xi⃗+∂f∂yj⃗+∂f∂zk⃗grad \ f = (\frac{\partial f}{\partial x}, \frac{\partial f}{\partial y}, \frac{\partial f}{\partial z}) = \frac{\partial f}{\partial x} \vec{i} + \frac{\partial f}{\partial y} \vec{j} + \frac{\partial f}{\partial z}\vec{k}grad f=(∂x∂f,∂y∂f,∂z∂f)=∂x∂fi+∂y∂fj+∂z∂fk
- 同样可定义二元函数f(x,y)在点P(x,y)处的梯度 gradf=∂f∂xi⃗+∂f∂yj⃗=(∂f∂x,∂f∂y)grad \ f = \frac{\partial f}{\partial x} \vec{i} + \frac{\partial f}{\partial y} \vec{j} = (\frac{\partial f}{\partial x}, \frac{\partial f}{\partial y})grad f=∂x∂fi+∂y∂fj=(∂x∂f,∂y∂f)
- 说明:函数的方向导数为梯度在该方向上的投影
- ∇=(∂∂x,∂∂y)\nabla = (\frac{\partial}{\partial x}, \frac{\partial}{\partial y})∇=(∂x∂,∂y∂), 引用记号,称为奈布拉(Nebla)算符,或称为向量微分算子或哈密顿(W.R.Hamilton)算子
- 则梯度可记为:gradf=(∂f∂x,∂f∂y)∇fgrad \ f = (\frac{\partial f}{\partial x}, \frac{\partial f}{\partial y}) \nabla fgrad f=(∂x∂f,∂y∂f)∇f
- 函数f沿梯度grad f方向,增加最快(上升)
- 函数f沿负梯度 -grad f方向,减小最快(下降)
- gradf(x0,y0)=fx′(x0,y0)i+fy′(x0,y0)j)grad \ f(x_0, y_0) = f_x'(x_0, y_0)i + f_y'(x_0, y_0)j)grad f(x0,y0)=fx′(x0,y0)i+fy′(x0,y0)j)
- 或 ∇f(x0,y0)=fx′(x0,y0)i+fy′(x0,y0)j=fx′(x0,y0),fy′(x0,y0)\nabla f(x_0, y_0) = f_x'(x_0, y_0)i + f_y'(x_0, y_0) j = {f_x'(x_0, y_0), f_y'(x_0, y_0)}∇f(x0,y0)=fx′(x0,y0)i+fy′(x0,y0)j=fx′(x0,y0),fy′(x0,y0)
- gradf=(∂f∂x,∂f∂y,∂f∂z)=∂f∂xi⃗+∂f∂yj⃗+∂f∂zk⃗grad \ f = (\frac{\partial f}{\partial x}, \frac{\partial f}{\partial y}, \frac{\partial f}{\partial z}) = \frac{\partial f}{\partial x} \vec{i} + \frac{\partial f}{\partial y} \vec{j} + \frac{\partial f}{\partial z}\vec{k}grad f=(∂x∂f,∂y∂f,∂z∂f)=∂x∂fi+∂y∂fj+∂z∂fk
- 或 ∇f(x0,y0,z0)={fx′(x0,y0,z0),fy′(x0,y0,z0),fz′(x0,y0,z0)}=fx′(x0,y0,z0)i+fy′(x0,y0,z0)j+fz′(x0,y0,z0)k\nabla f(x_0, y_0, z_0) = \{f_x'(x_0, y_0, z_0), f_y'(x_0, y_0, z_0), f_z'(x_0, y_0, z_0)\} = f_x'(x_0, y_0, z_0)i + f_y'(x_0, y_0, z_0)j + f_z'(x_0, y_0, z_0)k∇f(x0,y0,z0)={fx′(x0,y0,z0),fy′(x0,y0,z0),fz′(x0,y0,z0)}=fx′(x0,y0,z0)i+fy′(x0,y0,z0)j+fz′(x0,y0,z0)k
说明
- 以三元函数为例,设u=f(x,y,z)u=f(x,y,z)u=f(x,y,z)在点P(x,y,z)处可微分,则函数在该点的梯度为 gradf=∇f=∂f∂xi⃗+∂f∂yj⃗+∂f∂zk⃗=(∂f∂x,∂f∂y,∂f∂z)=(∂(f)∂(x,y,z))grad \ f = \nabla f = \frac{\partial f}{\partial x} \vec{i} + \frac{\partial f}{\partial y} \vec{j} + \frac{\partial f}{\partial z}\vec{k} = (\frac{\partial f}{\partial x}, \frac{\partial f}{\partial y}, \frac{\partial f}{\partial z}) = (\frac{\partial (f)}{\partial(x,y,z)})grad f=∇f=∂x∂fi+∂y∂fj+∂z∂fk=(∂x∂f,∂y∂f,∂z∂f)=(∂(x,y,z)∂(f))
- 梯度是函数u=f(x,y,z)u=f(x,y,z)u=f(x,y,z)在点P处取得的最大方向导数的方向,最大方向导数为:∣gradf∣=(∂f∂x)2+(∂f∂y)2+(∂f∂z)2|grad \ f| = \sqrt{(\frac{\partial f}{\partial x})^2 + (\frac{\partial f}{\partial y})^2 + (\frac{\partial f}{\partial z})^2}∣grad f∣=(∂x∂f)2+(∂y∂f)2+(∂z∂f)2
- 函数u=f(x,y,z)u=f(x,y,z)u=f(x,y,z)在点P处沿方向l⃗\vec{l}l的方向导数:∂f∂l⃗=gradf⋅l°⃗=∇f⋅l°⃗\frac{\partial f}{\partial \vec{l}} = grad \ f·\vec{l°} = \nabla f · \vec{l °}∂l∂f=grad f⋅l°=∇f⋅l°
例1
- 求grad1x2+y2grad \ \frac{1}{\sqrt{x^2 + y^2}}grad x2+y21
- 解:
- 这里f(x,y)=1x2+y2f(x,y) = \frac{1}{x^2 + y^2}f(x,y)=x2+y21
- 因 ∂f∂x=−2x(x2+y2)2,∂f∂y=−2y(x2+y2)2\frac{\partial f}{\partial x} = - \frac{2x}{(x^2 + y^2)^2}, \frac{\partial f}{\partial y} = - \frac{2y}{(x^2 + y^2)^2}∂x∂f=−(x2+y2)22x,∂y∂f=−(x2+y2)22y
- 所以,grad1x2+y2=−2x(x2+y2)2i⃗−2y(x2+y2)2j⃗grad \ \frac{1}{\sqrt{x^2 + y^2}} = - \frac{2x}{(x^2 + y^2)^2} \vec{i} - \frac{2y}{(x^2 + y^2)^2} \vec{j}grad x2+y21=−(x2+y2)22xi−(x2+y2)22yj
例2
- 设f(x,y,z)=x3−xy2−zf(x,y,z) = x^3 - xy^2 - zf(x,y,z)=x3−xy2−z, p(1,1,0)p(1,1,0)p(1,1,0).
- 问f(x,y,z)在p处沿什么方向变化最快,在这方向的变化率是多少?
- 解
- ∇f=fx′i+fy′j+fz′k=(3x2−y2)i−2xyj−k\nabla f = f_x'i + f_y'j + f_z'k = (3x^2 - y^2)i - 2xyj - k∇f=fx′i+fy′j+fz′k=(3x2−y2)i−2xyj−k
- ∇f(1,1,0)=2i−2j−k\nabla f(1,1,0) = 2i - 2j - k∇f(1,1,0)=2i−2j−k
- 沿 ∇f(1,1,0)\nabla f(1,1,0)∇f(1,1,0) 方向,增加最快(上升)
- 沿 −∇f(1,1,0)- \nabla f(1,1,0)−∇f(1,1,0) 方向,增加最快(下降)
- max{∂f∂l∣p}=∣gradf∣=∣∇f(1,1,0)∣=3max\{\frac{\partial f}{\partial l} |_p\} = |grad \ f| = |\nabla f(1,1,0)| = 3max{∂l∂f∣p}=∣grad f∣=∣∇f(1,1,0)∣=3
- min{∂f∂l∣p}=−∣gradf∣=−∣∇f(1,1,0)∣=−3min\{\frac{\partial f}{\partial l} |_p\} = -|grad \ f| = -|\nabla f(1,1,0)| = -3min{∂l∂f∣p}=−∣grad f∣=−∣∇f(1,1,0)∣=−3
AI笔记: 数学基础之方向导数的计算和梯度相关推荐
- AI笔记: 数学基础之矩阵的初等变换计算矩阵的秩
引例 求解矩阵方程AX=B, 其中 A = ( 2 1 − 3 1 2 − 2 − 1 3 2 ) , B = ( 1 − 1 2 0 − 2 5 ) A =\left (\begin{array}{ ...
- AI笔记: 数学基础之偏导数与方向导数
多元函数偏导数 在一个多变量的函数中,偏导数就是关于其中一个变量的导数而保持其他变量恒定不变. 假定二元函数z=f(x,y)z=f(x,y)z=f(x,y), 点(x_0, y_0)是其定义域内的一个 ...
- AI笔记: 数学基础之联合概率、条件概率与全概率公式
联合概率 表示两个事件共同发生的概率,事件A和事件B的共同概率记为:P(AB).P(A,B)P(AB).P(A,B)P(AB).P(A,B) 或者P(A∩B)P(A \cap B)P(A∩B), 记为 ...
- AI笔记: 数学基础之概率与统计
概率 1 )概率与频率 概率是一个稳定的数值,也就是某件事发生或不发生的概率是多少. 频率是在一定数量的某件事情上面,发生的数与总数的比值. 假设事件A的概率是0.3,在100次中发生28次,那么它的 ...
- AI笔记: 数学基础之矩阵运算与行列式
方阵行列式 1 ) 简单的方阵行列式 行列式是数学的一个函数,可以看做是几何空间中,一个线性变换对"面积"或"体积"的影响 方阵行列式,n阶方阵A的行列式表示为 ...
- AI笔记: 数学基础之数字特征-标准差、协方差、相关系数、中心矩、原点矩、峰度、偏度
标准差 标准差(Standard Deviation)是离均值平方的算术平均数的平方根,用符号 σ \sigma σ 表示,其实标准差就是方差的算术平方根 标准差和方差都是测量离散趋势的最重要.最常见 ...
- AI笔记: 数学基础之函数的导数应用及求导公式
关于导数 导数是数学中非常重要的概念,它能反应出速度变化的快慢,尤其在AI的算法分析,优化以及数据挖掘中用到很多 导数的引出 引例1 变速直线运动的速度 s是距离,t是时间,v是速度 设描述指点运动的 ...
- AI笔记: 数学基础之数字特征-期望与方差
关于 3 σ 3\sigma 3σ法则 备注:图片托管于github,请确保网络的可访问性 3 σ 3\sigma 3σ法则: 3 σ 3\sigma 3σ之外的数据可认为异常数据 期望 期望(mea ...
- AI笔记: 数学基础之二项分布与二项式定理
概率试验 1.投掷一个骰子投掷5次 2.某人射击1次,击中目标的概率是0.8, 他射击10次: 3.一个盒子中装有5个球(3红2白),有放回依次从中抽取5个球 4.生产一种零件,出现次品的概率是0.0 ...
- AI笔记: 数学基础之向量组的线性表示与线性相关
向量组 向量组:有限个相同维度的行向量或列向量组合成的一个集合就叫做向量组A 如果是行向量,那么表示为:A=(a1⃗a2⃗a3⃗⋮an⃗⋮)A = \left (\begin{array}{cccc} ...
最新文章
- 如何以初学者角度写好一篇国际学术论文?
- 腾讯获赔 475 万!首例“微信自动抢红包”不正当竞争案宣判
- html怎么使用伪类清除浮动,JS中使用 after 伪类清除浮动实例
- Linux软件安装配置Yum源
- [TCP/IP] TCP如何保证可靠性
- Android之设置当前app为默认浏览器研究
- 20180209-shutil模块
- 4)lsof linux命令,***Linux命令实时监测系统(top,htop,iotop,lsof,tcpdump,netstat,vmstat,iostat)...
- lstm中look_back的大小选择_使用PyTorch手写代码从头构建LSTM,更深度的理解其工作原理
- python导入excel模块_python使用openpyxl模块操作excel
- 解决两个WINDOWS10的卡死问题
- 搜索留痕技术工具-免费搜索留痕外链工具发布
- mysql临时表关联查询_MySQL如何执行关联查询
- 用canvas实现一个简易的涂鸦画板
- UE4 昵称修改后客户端的同步
- Ubuntu下,grep的用法
- 固定资产盘点的问题及解决方案,云呐如何做固定资产盘点
- NULL Pointer Dereference(转)
- 【paper】latex使用algorithm工具包实现伪代码排版
- 国内实验室信息化管理现状