四旋翼飞行器9——APM地面站使用详解(校准结束)
四旋翼飞行器9——APM地面站使用详解
如果你手上有一块apm飞控,那么APM飞控第一步——下载APM地面站,校准传感器、遥控器。
下面的文章,大部分参考这个:
http://bbs.loveuav.com/thread-210-1-3.html
以及淘宝店的视频:
http://v.youku.com/v_show/id_XMjUyODYwMDA0NA==.html
地面站下载
其中,apm地面站(淘宝店给我的)下载见链接:http://pan.baidu.com/s/1nvcCRlZ ,
另外一个地址: http://www.playuav.com/article/36
错误解决办法
可能你在按步骤操作的时候出现以下问题,可以再回头看一下。
如果在校准传感器时出现飞控与地面站连接中断,一般都是你的USB线不行,接触不良,不过也有其他问题。总的来说,解决办法:
1、关掉Mission Planner软件,重新打开。
2、检查好接线(电脑USB口与飞控连接)
3、还不行,那么就换一根USB线
4、换个电脑,装软件再试一下(装软件很快的)
5、重新下载个地面站试试。(我就是重新下了一个)
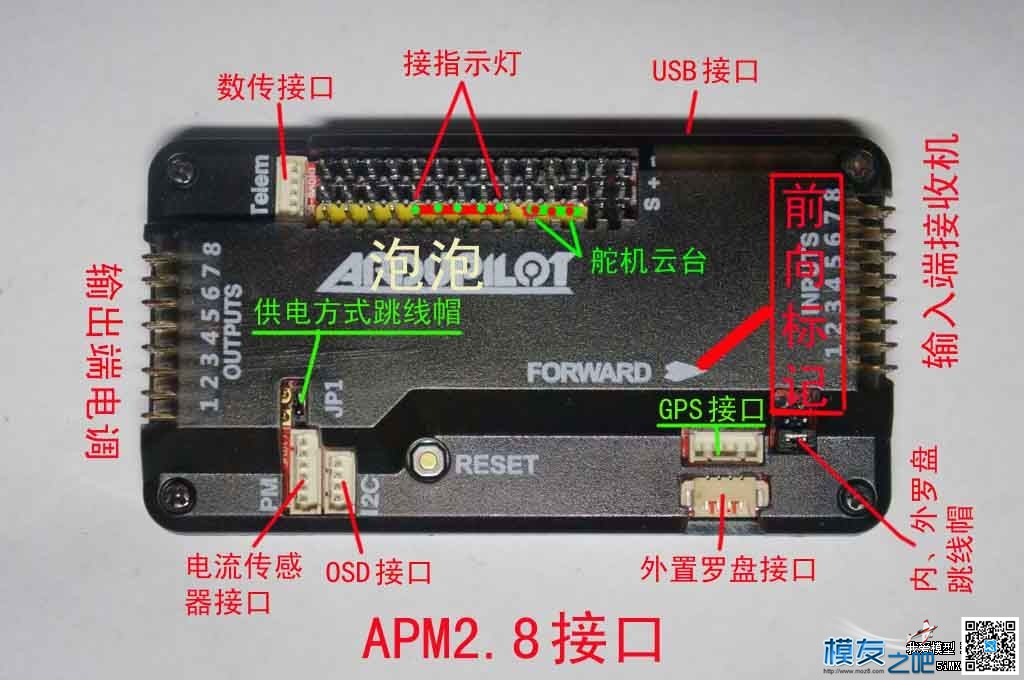
硬件安装
- 1、通过USB接口供电时,如果USB数据处于连接状态,APM会切断数传接口的通讯功能,所以请不要同时使用数传和USB线连接调试APM,USB接口的优先级高于数传接口,仅有供电功能的USB线不在此限;
- 2、APM板载的加速度传感器受震动影响,会产生不必要的动差,直接影响飞控姿态的计算,条件允许请尽量使用一个减震平台来安装APM主板;
- 3、APM板载的高精气压计对温度的变化非常敏感,所以请尽量在气压计上覆盖一块黑色海绵用来遮光,以避免阳光直射的室外飞行环境下,光照热辐射对气压计的影响。另外覆盖海绵,也可以避免飞行器自身气流对气压计的干扰。
使用建议
对于初次使用APM自驾仪的用户来说,建议你分步骤完成APM的入门使用:
1、首先安装地面站控制软件及驱动,熟悉地面站界面的各个菜单功能;
2、仅连接USB线学会固件的下载;
3、连接接收机和USB线完成APM的遥控校准、加速度校准和罗盘校准;
4、完成各类参数的设定;
5、组装飞机,完成各类安全检查后试飞;
6、PID参数调整;
7、APM各类高阶应用
。。。。。。。。。。。。。好的正文开始。。。。。。。。。。。。。。。
1、地面站调试软件Mission Planner安装
首先,MissionPlanner的安装运行需要微软的Net Framework 4.0组件,所以在安装Mission Planner之前请先下载Net Flamework 4.0并安装
(这是原作者写的,但是我那个win10家庭版系统,试了以后,提示说已经安装好了,因此,这步其实没有必要。)
安装完NetFramework后开始下载Mission Planner安装程序包,最新版本的Mission Planner可以点击此处下载,下载页面中每个版本都提供了MSI版和ZIP版可供选择。MSI为应用程序安装包版,安装过程中会同时安装APM的USB驱动,安装后插上APM的USB线即可使用。ZIP版为绿色免安装版,解压缩即可使用,但是连接APM后需要你手动安装APM的USB驱动程序,驱动程序在解压后的Driver文件夹中。具体使用哪个版本请自行决定,如果是第一次安装使用,建议你下载MSI版。
以安装MSI版为例(注意:安装前请不要连接APM的USB线),双击下载后的MSI文件,然后一步一步Next即可,只是安装过程中弹出设备驱动程序安装向导时,请点击下一步继续,否则会跳过驱动程序的安装

接着勾选始终信任……然后点击安装,安装程序会自动安装相关的驱动程序

安装完Mission Planner后,安装程序一般不会在桌面创建一个快捷方式,所以请自行打开安装目录,选择ArdupilotMegaPlanner10文件右键,选择发送一个快捷方式到桌面上,以方便日后使用。

认识Misson Planner的界面
安装完Mission Planner和驱动后,现在可以开始启动Misson Planner主程序了,启动后首先呈现的是一个多功能飞行数据仪表界面。
![]()
新版Misson Planner已将大部分菜单汉化,非常贴合国情。主界面左上方为八个主菜单按钮,飞行数据实时显示飞行姿态与数据;飞行计划是任务规划菜单;初始设置用于固件的安装与升级以及一些基本设置;配置调试包含了详尽的PID调节,参数调整等菜单;模拟是给APM刷入特定的模拟器固件后,将APM作为一个模拟器在电脑上模拟飞行使用;终端是一个类似DOS环境的命令行调试窗口,功能非常强大。主界面右上方是端口选择、波特率以及连接/断开按钮(connect/disconnect),具体使用后续有相关说明。
固件安装
APM拿到手后首先要做的就是给它刷入你自己需要的固件,虽然卖家在销售前可能会帮你刷入固件,但是未必是符合你要求的固件,所以学会刷新APM的固件是你的必修课之一。
固件安装前请先连接APM的USB线到电脑(其它的可不用连接),确保电脑已经识别到APM的COM口号后,打开Mission Planner(以下简称MP),在MP主界面的右上方端口选择下拉框那里选择对应的COM口,一般正确识别的COM口都有Arduino Mega 2560标识,直接选择带这个标识的COM口,然后波特率选择115200,注意:请不要点击connect连接按钮,固件安装过程中程序会自行连接。如果你之前已经连接了APM,那么请点击Disconnect断开连接,否则固件安装过程中弹出错误提示
另外请注意:请不要用无线数传安装固件,虽然无线数传跟USB有着同样的通信功能,但它缺少reset信号,无法在刷固件的过程中给2560复位,会导致安装失败。

接下去点击Install setup(初始设置),MP提供了两种方式升级安装固件,一种是Install Firmware手动模式,另外一种是Wizard向导模式,Wizard向导模式会一步一步的以对话方式提示你选择你对应的飞控板、飞行模式等参数,虽然比较人性化,但是有个弊端,向导模式会在安装过程中检索你的端口,如果检索后端口后,因电脑性能的差异,端口没有有效释放的话,后续的固件烧入会提示不成功,所以使用向导模式升级安装固件的话出错概率比较大,建议你使用Install Firmware手动模式安装。

点击Install Firmware,窗口右侧会自动从网络下载最新的固件并以图形化显示固件名称以及固件对应的飞机模式,你只需要在对应你飞机模式的图片上点击,MP就会自动从网络上下载该固件,然后自动完成连接APM——写入程序——校验程序——断开连接等一系列动作,完全无需人工干预。如果你想使用一个历史版本的固件,那么请点击右下角Beta firmware pick previous Firmware处,点击后会出现一个下拉框,你只要在下拉框里选择你自己需要的固件就行了。
3.1版本以后的固件在安装完后都会先弹出一个警告提示框

这是在提醒你:这个版本的固件在解锁后,电机就会以怠速运行,如果关闭或者配置这个功能,请使用MOT_SPIN_ARMED参数进行配置,具体使用请看后文的参数配置。
固件安装提示Done成功后,你就可以点击右上角的connect连接按钮连接APM,查看APM实时运行姿态与数据了
当一个全新的固件下载进APM板以后,你首先需要做的是三件事:一是遥控输入校准,二是加速度校准,三是罗盘校准,如果这三件事不做,后续的解锁是不能进行的,MP的姿态界面上也会不断弹出红色提示:
PreArm: RC not calibrated(解锁准备:遥控器没有校准)
我是先校准加速度计和电子罗盘
具体操作见视频:(更直观一些)
http://v.youku.com/v_show/id_XMjUyODYwMDA0NA==.html
遥控器校准:
遥控校准需要连接你的接收机,具体连接请查看APM连接安装图,连接好后连接APM的USB数据线(也可以通过数传进行连接),然后打开遥控器发射端电源,运行MP,按下图步骤选择好波特率与端口后点击connect连接APM,接着点击Install setup(初始设置)——Mandatory Hardware——Radio Calibrated(遥控校准)——点击窗口右边的校准遥控按钮

点击校准遥控后会依次弹出两个提醒:分别是确认你遥控发射端已经打开and接收机已经通电连接,确认你的电机没有通电(这点非常重要,做这步工作的时候建议你的APM只连接USB和接收机两个设备)



当每个通道的红色指示条移动到上下限位置的时候,点击Click when Done保存校准时候,弹出两个OK窗口后完成遥控器的校准。如果你拨动摇杆时上面的指示条没有变化,请检查接收机连接是否正确,另外同时检查下每个通道是否对应。
四旋翼飞行器9——APM地面站使用详解(校准结束)相关推荐
- 四旋翼飞行器8——APM飞控资料
文章目录 一.手上四旋翼淘宝店链接: 二.调参F450-APM2.8-AT9组装和调参教程(视频) 三 .APM地面站下载: 四.详细的APM入门教程 五.其他资料 一.手上四旋翼淘宝店链接: htt ...
- 四旋翼飞行器17——APM飞控主要飞行模式
当你在遥控无人机时,你会发现就算你遥控技术再高超,也不可能达到完美,比如你想悬停在那里.水平飞行.绕圈飞行等等,当然这些问题,可以借助传感器实现,比如气压计或者超声波可以定高,光流传感器可以定点,GP ...
- 四旋翼飞行器7——主要开源飞控介绍
四旋翼飞行器7--主要开源飞控介绍 文章目录 四旋翼飞行器7--主要开源飞控介绍 一.APM 特性包括: 硬件包括: 二 Pixhawk 特性包括: 各种恰到好处的传感器. 各种可扩展I/O接口和专用 ...
- 可变形的四旋翼飞行器——无人机
无人机的了解 四旋翼飞行器是无人机的一种,其结构简单.体积小.容易操纵,可以垂直起飞与降落,拥有很好的空中灵活机动能力.近些年来,四旋翼飞行器被应用到了许多领域,如航拍.地质监测.环境评估.运送快递等 ...
- 微型四旋翼飞行器设计经验之瞎扯淡
在正式开始记录微型四旋翼飞行器设计的学习笔记之前,感觉自己很有必要先给自己一个总结,也希望能够帮到更多的朋友少走弯路(虽然不知道帮助大不大). 去年九月下旬开始了微型四旋翼飞行器的学习与设计,在12月 ...
- 四旋翼飞行器10——华科尔DEVO-10遥控和RX1002接收机对码
四旋翼飞行器10--华科尔DEVO-10遥控和RX1002接收机对码 一.华科尔DEVO-10遥控和RX1002接收机简介 下面这个链接是淘宝店家给我的资料: DEVO-10遥控器操作手册 链接: h ...
- 四旋翼飞行器旋转矩阵公式推导!
四旋翼飞行器旋转矩阵公式推导! 方法一: 1.在二维平面中:如下图所示,在xoy平面中有一向量op⃗ =(x,y)T,旋转ϕ角后变为向量op⃗ ′=(x′,y′)T. 据图可得: x=|op⃗ |c ...
- 四旋翼飞行器的研究方向
毕业设计选的四旋翼飞行器设计的题目,顺便了解了下四旋翼飞行器有哪些值得研究的点. 四旋翼飞行器在高空检测(如电线,桥梁),灾害搜救,娱乐以及军事上都会有应用.相关研究的点也有很多,主要有飞行器的姿态估 ...
- 【飞控理论】四旋翼飞行器控制原理
该篇博客是对锡月科技无人机飞行控制原理教学内容的整理 1.四旋翼飞行器的两种结构: "×"字模式: Pitch和 Roll与1,3.2,4两组电机呈 45°夹角 . "十 ...
最新文章
- Linux下的redis的持久化,主从同步及哨兵
- 下载ssl证书并安装后如何导出备份
- 贪心算法--多处最优服务次序问题
- Spring的Bean实例化、属性注入、对象注入、复杂注入(基于xml配置方式)
- Elasticsearch安装(Linux)
- java list%3ca%3e排序_Apache Solr 远程命令+XXE执行漏洞(CVE-2017-12629)
- 实验室信息管理系统(南京浩展软件)
- AOP 中必须明白的概念-目标对象(Target Object)
- tls jdk_使用JDK 13查看TLS配置
- Ansible playbook
- suse linux运行asp,Linux Supervisor的安装与使用入门---SuSE
- 熊猫DataFrame from_dict()–字典到DataFrame
- Netty in action—第一个Netty应用
- 腾讯专访 | 子芽:代码疫苗技术,赋能数字化应用内生安全自免疫
- WinRAR和WinZIP 密码找回
- 目前最值得推荐的几款黑科技APP,快来收藏吧!
- 计算机二级office题库-操作题
- FlashFXP中文破解解压版
- JDBC获取数据库(mysql)四种连接方式(connection)
- 基于jsp+mysql+Spring的SSM在线蛋糕商城销售网站项目设计和实现