图像特征提取之LBP特征
原文站点:https://senitco.github.io/2017/06/12/image-feature-lbp/
局部二值模式(Local Binary Patter, LBP)是一种用来描述图像局部纹理特征的算子,LBP特征具有灰度不变性和旋转不变性等显著优点,它将图像中的各个像素与其邻域像素值进行比较,将结果保存为二进制数,并将得到的二进制比特串作为中心像素的编码值,也就是LBP特征值。LBP提供了一种衡量像素间邻域关系的特征模式,因此可以有效地提取图像的局部特征,而且由于其计算简单,可用于基于纹理分类的实时应用场景,例如目标检测、人脸识别等。
原始LBP特征
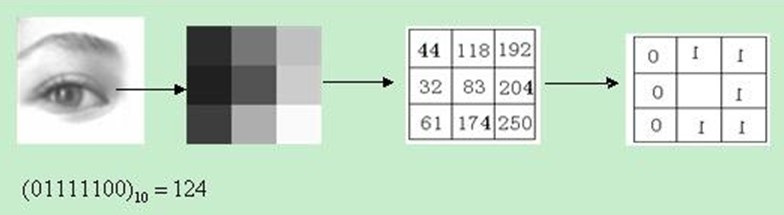
原始的LBP算子定义于图像中3×33 \times 3的邻域窗口,取窗口内中心像素的灰度值作为阈值,将8邻域像素的灰度值与其进行比较,若邻域像素值大于中心像素值,则比较结果取值为1,否则为0。这样邻域内的8个像素点经过比较后可得到8位二进制数,将其按顺序依次排列即可得到中心像素的LBP值。LBP特征值反映了中心像素和其邻域的纹理信息。LBP的取值一共有28=2562^8 = 256种,和一幅普通的灰度图像类似,因此可将LBP特征以灰度图的形式表达出来。由于LBP特征考虑的是纹理信息,而不包含颜色信息,因此彩色图需转换为灰度图。原始LBP特征的提取过程如下图所示:
公式定义如下:
LBP(x_c,y_c)=\Sigma_{p=0}^{P-1} 2^p s(i_p-i_c)
其中 (xc,yc)(x_c,y_c)代表邻域窗口内的中心像素,其像素值为 ici_c, ipi_p为邻域内其他像素值,s(x)是符号函数。
原始LBP特征的实现代码(OpenCV)如下:
template <typename _tp>
void getOriginLBPFeature(InputArray _src,OutputArray _dst)
{Mat src = _src.getMat();_dst.create(src.rows-2,src.cols-2,CV_8UC1);Mat dst = _dst.getMat();dst.setTo(0);for(int i=1;i<src.rows-1;i++){for(int j=1;j<src.cols-1;j++){_tp center = src.at<_tp>(i,j);unsigned char lbpCode = 0;lbpCode |= (src.at<_tp>(i-1,j-1) > center) << 7;lbpCode |= (src.at<_tp>(i-1,j ) > center) << 6;lbpCode |= (src.at<_tp>(i-1,j+1) > center) << 5;lbpCode |= (src.at<_tp>(i ,j+1) > center) << 4;lbpCode |= (src.at<_tp>(i+1,j+1) > center) << 3;lbpCode |= (src.at<_tp>(i+1,j ) > center) << 2;lbpCode |= (src.at<_tp>(i+1,j-1) > center) << 1;lbpCode |= (src.at<_tp>(i ,j-1) > center) << 0;dst.at<uchar>(i-1,j-1) = lbpCode;}}
}圆形LBP特征(Circular LBP or Extended LBP)
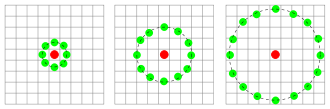
原始LBP特征考虑的是固定半径范围内的邻域像素,不能满足不同尺寸和频率纹理的需求,当图像的尺寸发生变化时,LBP特征将不能正确编码局部邻域的纹理信息。为了适应不同尺寸的纹理特征,Ojala等人对LBP算子
进行了改进,将3×33 \times 3邻域窗口扩展到任意邻域,并用圆形邻域代替了正方形邻域,改进后的LBP算子允许在半径为R的邻域内有任意多个像素点,从而得到在半径为R的区域内含有P个采样点的LBP算子。
采样点的坐标可通过以下公式计算:
x_p=x_c+R cos(2\pi p / P)
y_p=y_c+R sin(2\pi p / P)
其中 (xc,yc)(x_c,y_c)为中心像素点, (xp,yp),p∈P(x_p,y_p),p\in P为邻域内某个采样点,通过上次可以计算任意个采样点的坐标,但是得到的坐标值未必为整数,因此可通过双线性插值的方法来得到该采样点的像素值:
f(x, y) = \left[ \begin{matrix} 1-x& x\end{matrix} \right] \left[ \begin{matrix} f(0,0)& f(0,1)\\\ f(1,0)& f(1,1)\end{matrix} \right] \left[ \begin{matrix} 1-y\\\ y\end{matrix} \right]
圆形LBP特征的实现代码如下:
//圆形LBP特征计算,这种方法适于理解,但在效率上存在问题,声明时默认neighbors=8
template <typename _tp>
void getCircularLBPFeature(InputArray _src,OutputArray _dst,int radius,int neighbors)
{Mat src = _src.getMat();//LBP特征图像的行数和列数的计算要准确_dst.create(src.rows-2*radius,src.cols-2*radius,CV_8UC1);Mat dst = _dst.getMat();dst.setTo(0);//循环处理每个像素for(int i=radius;i<src.rows-radius;i++){for(int j=radius;j<src.cols-radius;j++){//获得中心像素点的灰度值_tp center = src.at<_tp>(i,j);unsigned char lbpCode = 0;for(int k=0;k<neighbors;k++){//根据公式计算第k个采样点的坐标,这个地方可以优化,不必每次都进行计算radius*cos,radius*sinfloat x = i + static_cast<float>(radius * \cos(2.0 * CV_PI * k / neighbors));float y = j - static_cast<float>(radius * \sin(2.0 * CV_PI * k / neighbors));//根据取整结果进行双线性插值,得到第k个采样点的灰度值//1.分别对x,y进行上下取整int x1 = static_cast<int>(floor(x));int x2 = static_cast<int>(ceil(x));int y1 = static_cast<int>(floor(y));int y2 = static_cast<int>(ceil(y));//2.计算四个点(x1,y1),(x1,y2),(x2,y1),(x2,y2)的权重//下面的权重计算方式有个问题,如果四个点都相等,则权重全为0,计算出来的插值为0//float w1 = (x2-x)*(y2-y); //(x1,y1)//float w2 = (x2-x)*(y-y1); //(x1,y2)//float w3 = (x-x1)*(y2-y); //(x2,y1)//float w4 = (x-x1)*(y-y1); //(x2,y2)//将坐标映射到0-1之间float tx = x - x1;float ty = y - y1;//根据0-1之间的x,y的权重计算公式计算权重float w1 = (1-tx) * (1-ty);float w2 = tx * (1-ty);float w3 = (1-tx) * ty;float w4 = tx * ty;//3.根据双线性插值公式计算第k个采样点的灰度值float neighbor = src.at<_tp>(x1,y1) * w1 + src.at<_tp>(x1,y2) *w2 \+ src.at<_tp>(x2,y1) * w3 +src.at<_tp>(x2,y2) *w4;//通过比较获得LBP值,并按顺序排列起来lbpCode |= (neighbor>center) <<(neighbors-k-1);}dst.at<uchar>(i-radius,j-radius) = lbpCode;}}
}圆形LBP特征的效率优化版本:
//圆形LBP特征计算,效率优化版本,声明时默认neighbors=8
template <typename _tp>
void getCircularLBPFeatureOptimization(InputArray _src,OutputArray _dst,int radius,int neighbors)
{Mat src = _src.getMat();//LBP特征图像的行数和列数的计算要准确_dst.create(src.rows-2*radius,src.cols-2*radius,CV_8UC1);Mat dst = _dst.getMat();dst.setTo(0);for(int k=0;k<neighbors;k++){//计算采样点对于中心点坐标的偏移量rx,ryfloat rx = static_cast<float>(radius * cos(2.0 * CV_PI * k / neighbors));float ry = -static_cast<float>(radius * sin(2.0 * CV_PI * k / neighbors));//为双线性插值做准备//对采样点偏移量分别进行上下取整int x1 = static_cast<int>(floor(rx));int x2 = static_cast<int>(ceil(rx));int y1 = static_cast<int>(floor(ry));int y2 = static_cast<int>(ceil(ry));//将坐标偏移量映射到0-1之间float tx = rx - x1;float ty = ry - y1;//根据0-1之间的x,y的权重计算公式计算权重,权重与坐标具体位置无关,与坐标间的差值有关float w1 = (1-tx) * (1-ty);float w2 = tx * (1-ty);float w3 = (1-tx) * ty;float w4 = tx * ty;//循环处理每个像素for(int i=radius;i<src.rows-radius;i++){for(int j=radius;j<src.cols-radius;j++){//获得中心像素点的灰度值_tp center = src.at<_tp>(i,j);//根据双线性插值公式计算第k个采样点的灰度值float neighbor = src.at<_tp>(i+x1,j+y1) * w1 + src.at<_tp>(i+x1,j+y2) *w2 \+ src.at<_tp>(i+x2,j+y1) * w3 +src.at<_tp>(i+x2,j+y2) *w4;//LBP特征图像的每个邻居的LBP值累加,累加通过与操作完成,对应的LBP值通过移位取得dst.at<uchar>(i-radius,j-radius) |= (neighbor>center) <<(neighbors-k-1);}}}
}旋转不变LBP特征(Rotation Invariant LBP)
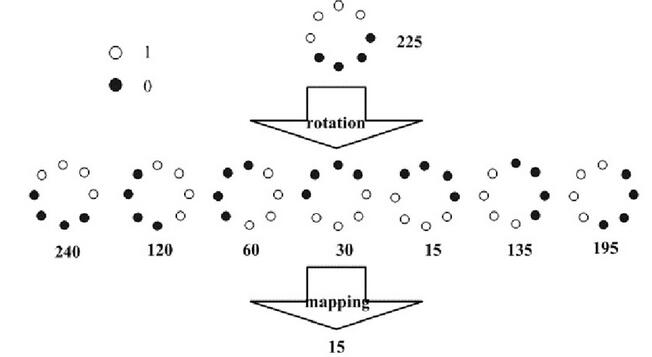
无论是原始LBP算子还是圆形LBP算子,都只是灰度不变的,而不是旋转不变的,旋转图像会得到不同的LBP特征值。相关研究人员又提出了一种具有旋转不变性的LBP算子,即不断旋转圆形邻域的采样点,或者以不同的邻域像素作为起始点,顺时针遍历所有采样点,得到一系列编码值(P个),取其中最小的作为该邻域中心像素的LBP值。旋转不变LBP算子的示意图如下:
旋转不变LBP特征的实现代码如下:
//旋转不变圆形LBP特征计算,声明时默认neighbors=8
template <typename _tp>
void getRotationInvariantLBPFeature(InputArray _src,OutputArray _dst,int radius,int neighbors)
{Mat src = _src.getMat();//LBP特征图像的行数和列数的计算要准确_dst.create(src.rows-2*radius,src.cols-2*radius,CV_8UC1);Mat dst = _dst.getMat();dst.setTo(0);for(int k=0;k<neighbors;k++){//计算采样点对于中心点坐标的偏移量rx,ryfloat rx = static_cast<float>(radius * cos(2.0 * CV_PI * k / neighbors));float ry = -static_cast<float>(radius * sin(2.0 * CV_PI * k / neighbors));//为双线性插值做准备//对采样点偏移量分别进行上下取整int x1 = static_cast<int>(floor(rx));int x2 = static_cast<int>(ceil(rx));int y1 = static_cast<int>(floor(ry));int y2 = static_cast<int>(ceil(ry));//将坐标偏移量映射到0-1之间float tx = rx - x1;float ty = ry - y1;//根据0-1之间的x,y的权重计算公式计算权重,权重与坐标具体位置无关,与坐标间的差值有关float w1 = (1-tx) * (1-ty);float w2 = tx * (1-ty);float w3 = (1-tx) * ty;float w4 = tx * ty;//循环处理每个像素for(int i=radius;i<src.rows-radius;i++){for(int j=radius;j<src.cols-radius;j++){//获得中心像素点的灰度值_tp center = src.at<_tp>(i,j);//根据双线性插值公式计算第k个采样点的灰度值float neighbor = src.at<_tp>(i+x1,j+y1) * w1 + src.at<_tp>(i+x1,j+y2) *w2 \+ src.at<_tp>(i+x2,j+y1) * w3 +src.at<_tp>(i+x2,j+y2) *w4;//LBP特征图像的每个邻居的LBP值累加,累加通过与操作完成,对应的LBP值通过移位取得dst.at<uchar>(i-radius,j-radius) |= (neighbor>center) <<(neighbors-k-1);}}}//进行旋转不变处理for(int i=0;i<dst.rows;i++){for(int j=0;j<dst.cols;j++){unsigned char currentValue = dst.at<uchar>(i,j);unsigned char minValue = currentValue;for(int k=1;k<neighbors;k++) //循环左移{unsigned char temp = (currentValue>>(neighbors-k)) | (currentValue<<k);if(temp < minValue){minValue = temp;}}dst.at<uchar>(i,j) = minValue;}}
}LBP等价模式(Uniform LBP)
对于一个半径为R的圆形区域,包含有P个邻域采样点,则LBP算子可能产生2P2^P种模式。随着邻域内采样点数的增加,LBP值的取值数量呈指数级增长。例如5×55 \times 5邻域内20个采样点,则对应有2202^{20}中模式,过多的二进制模式不利于纹理信息的提取、分类、识别。例如,将LBP特征用于纹理分类或人脸识别时,一般采用LBP特征的统计直方图来表达图像的信息,而较多的模式种类将使得数据量过大,且直方图过于稀疏。因此,需要对原始的LBP特征进行降维,使得数据量减少的情况下能最好地表达图像的信息。
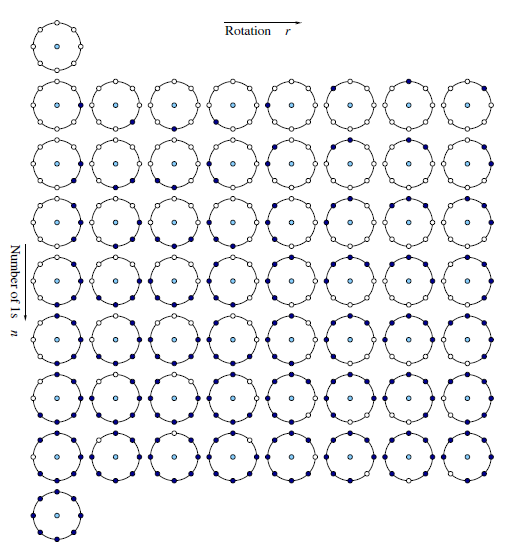
为了解决二进制模式过多的问题,提高统计性,Ojala提出了一种“等价模式”(Uniform Pattern)来对LBP特征的模式种类进行降维。Ojala认为,在实际图像中,绝大数LBP模式最多只包含两次从0到1或者从1到0的跳变,“等价模式”定义为:当某个LBP所对应的循环二进制数从0到1或者从1到0最多有两次跳变时,该LBP所对应的二进制就是一个等价模式类。如00000000(0次跳变),11000011(2次跳变)都是等价模式类。除等价模式类以外的模式都归为另一类,称为混合模式类,例如10010111(共4次跳变)。通过改进,二进制模式的种类大大减少,由原来的2P2^P中降为P(P−1)+2+1P(P-1)+2+1种,其中P(P−1)P(P-1)为2次跳变的模式数,2为0次跳变(全”0”或全”1”)的模式数,1为混合模式的数量,由于是循环二进制数,因此’0’、’1’跳变次数不可能为奇数次。对于3×33 \times 3邻域内8个采样点来说,二进制模式由原始的256种变为59种。这使得特征向量的维数大大减少,并且可以减少高频噪声带来的影响。实验表明,一般情况下,等价模式的数目占全部模式的90%以上,可以有效对数据进行降维。下图为58种等价模式类:
在具体实现中,等价模式类按值递增从1开始编码,混合模式类编码为0,因此得到的LBP特征图整体偏暗。LBP等价模式的实现代码如下:
//等价模式LBP特征计算
template <typename _tp>
void getUniformPatternLBPFeature(InputArray _src,OutputArray _dst,int radius,int neighbors)
{Mat src = _src.getMat();//LBP特征图像的行数和列数的计算要准确_dst.create(src.rows-2*radius,src.cols-2*radius,CV_8UC1);Mat dst = _dst.getMat();dst.setTo(0);//LBP特征值对应图像灰度编码表,直接默认采样点为8位uchar temp = 1;uchar table[256] = {0};for(int i=0;i<256;i++){if(getHopTimes(i)<3){table[i] = temp;temp++;}}//是否进行UniformPattern编码的标志bool flag = false;//计算LBP特征图for(int k=0;k<neighbors;k++){if(k==neighbors-1){flag = true;}//计算采样点对于中心点坐标的偏移量rx,ryfloat rx = static_cast<float>(radius * cos(2.0 * CV_PI * k / neighbors));float ry = -static_cast<float>(radius * sin(2.0 * CV_PI * k / neighbors));//为双线性插值做准备//对采样点偏移量分别进行上下取整int x1 = static_cast<int>(floor(rx));int x2 = static_cast<int>(ceil(rx));int y1 = static_cast<int>(floor(ry));int y2 = static_cast<int>(ceil(ry));//将坐标偏移量映射到0-1之间float tx = rx - x1;float ty = ry - y1;//根据0-1之间的x,y的权重计算公式计算权重,权重与坐标具体位置无关,与坐标间的差值有关float w1 = (1-tx) * (1-ty);float w2 = tx * (1-ty);float w3 = (1-tx) * ty;float w4 = tx * ty;//循环处理每个像素for(int i=radius;i<src.rows-radius;i++){for(int j=radius;j<src.cols-radius;j++){//获得中心像素点的灰度值_tp center = src.at<_tp>(i,j);//根据双线性插值公式计算第k个采样点的灰度值float neighbor = src.at<_tp>(i+x1,j+y1) * w1 + src.at<_tp>(i+x1,j+y2) *w2 \+ src.at<_tp>(i+x2,j+y1) * w3 +src.at<_tp>(i+x2,j+y2) *w4;//LBP特征图像的每个邻居的LBP值累加,累加通过与操作完成,对应的LBP值通过移位取得dst.at<uchar>(i-radius,j-radius) |= (neighbor>center) <<(neighbors-k-1);//进行LBP特征的UniformPattern编码if(flag){dst.at<uchar>(i-radius,j-radius) = table[dst.at<uchar>(i-radius,j-radius)];}}}}
}//计算跳变次数
int getHopTimes(int n)
{int count = 0;bitset<8> binaryCode = n;for(int i=0;i<8;i++){if(binaryCode[i] != binaryCode[(i+1)%8]){count++;}}return count;
}此外,旋转不变的Uniform LBP算子的等价模式类的数目为P+1个,对于8个采样点,基于等价模式的旋转不变LBP模式只有9个输出,该模式对于上图的Uniform LBP,每一行都是旋转不变的,对应同一个编码值。
多尺度LBP(Multiscale Block LBP)
基本LBP算子获取的是单个像素和其邻域像素间的纹理信息,属于微观特征。中科院的研究人员针对此提出了一种多尺度的LBP算子,将图像分为一个个块(block),再将每个块分为一个个的小连通区域(cell),类似于HOG特征,cell内的灰度平均值或者和值作为当前cell的灰度阈值,与邻域cell进行比较得到LBP值,生成的特征即为MB-LBP,block大小为3×33 \times 3,cell大小为1,就是原始的LBP特征。下图所示block为9×99 \times 9,cell为3×33 \times 3。
MB-LBP特征的实现代码如下:
//MB-LBP特征的计算
void getMultiScaleBlockLBPFeature(InputArray _src,OutputArray _dst,int scale)
{Mat src = _src.getMat();Mat dst = _dst.getMat();//定义并计算积分图像int cellSize = scale / 3;int offset = cellSize / 2;Mat cellImage(src.rows-2*offset,src.cols-2*offset,CV_8UC1);for(int i=offset;i<src.rows-offset;i++){for(int j=offset;j<src.cols-offset;j++){int temp = 0;for(int m=-offset;m<offset+1;m++){for(int n=-offset;n<offset+1;n++){temp += src.at<uchar>(i+n,j+m);}}temp /= (cellSize*cellSize);cellImage.at<uchar>(i-cellSize/2,j-cellSize/2) = uchar(temp); }}getOriginLBPFeature<uchar>(cellImage,dst);
}多尺度模式下同样用到了降维,论文中是直接采样统计的方法对不同尺度的LBP算子的模式进行统计,选取占比例较高的模式,而不是利用跳变规则。具体来说,就是将得到的MB-LBP特征计算统计直方图,通过对bin中的数值进行排序以及权衡,将排序在前N(63)位的特征值看作是等价模式类,其余的为混合模式类,总共为N+1类,论文中称之为(SEMB-LBP, Statistically Effective MB-LBP)。
SEMB-LBP的实现代码如下:
//求SEMB-LBP
void SEMB_LBPFeature(InputArray _src,OutputArray _dst,int scale)
{Mat dst=_dst.getMat();Mat MB_LBPImage;getMultiScaleBlockLBPFeature(_src,MB_LBPImage,scale);//imshow("dst",dst);Mat histMat;int histSize = 256;float range[] = {float(0),float(255)};const float* ranges = {range};//计算LBP特征值0-255的直方图calcHist(&MB_LBPImage,1,0,Mat(),histMat,1,&histSize,&ranges,true,false);histMat.reshape(1,1);vector<float> histVector(histMat.rows*histMat.cols);uchar table[256];memset(table,64,256);if(histMat.isContinuous()){//histVector = (int *)(histMat.data);//将直方图histMat变为vector向量histVectorhistVector.assign((float*)histMat.datastart,(float*)histMat.dataend);vector<float> histVectorCopy(histVector);//对histVector进行排序,即对LBP特征值的数量进行排序,降序排列sort(histVector.begin(),histVector.end(),greater<float>());for(int i=0;i<63;i++){for(int j=0;j<histVectorCopy.size();j++){if(histVectorCopy[j]==histVector[i]){//得到类似于Uniform的编码表table[j]=i;}}}}dst = MB_LBPImage;//根据编码表得到SEMB-LBPfor(int i=0;i<dst.rows;i++){for(int j=0;j<dst.cols;j++){dst.at<uchar>(i,j) = table[dst.at<uchar>(i,j)];}}
}图像的LBP特征向量(Local Binary Patterns Histograms)
对图像中的每个像素求取LBP特征值可得到图像的LBP特征图谱,但一般不直接将LBP图谱作为特征向量用于分类识别,而是类似于HOG特征,采用LBP特征的统计直方图作为特征向量。将LBP特征图谱划分为若干个子连通区域,并提取每个局部块的直方图,然后将这些直方图一次连接在一起形成LBP特征的统计直方图(LBPH),即可用于分类识别的LBP特征向量。
LBP特征向量的具体计算过程如下:
- 按照上述算法计算图像的LBP特征图谱
- 将LBP特征图谱分块,例如分成8×8=648 \times 8 = 64个区域
- 计算每个子区域中LBP特征值的统计直方图,并进行归一化,直方图大小为1×numPatterns1 \times numPatterns
- 将所有区域的统计直方图按空间顺序依次连接,得到整幅图像的LBP特征向量,大小为1×(numPatterns×64)1 \times (numPatterns \times 64)
- 从足够数量的样本中提取LBP特征,并利用机器学习的方法进行训练得到模型,用于分类和识别等领域。
对于LBP特征向量的维度,邻域采样点为8个,如果是原始的LBP特征,其模式数量为256,特征维数为64×256=1638464 \times 256 = 16384;如果是Uniform LBP特征,其模式数量为59,特征维数为64×59=377664 \times 59 = 3776,使用等价模式特征,可以有效进行数据降维,而对模型性能却无较大影响。
LBP特征向量的实现代码如下:
//计算LBP特征图像的直方图LBPH
Mat getLBPH(InputArray _src,int numPatterns,int grid_x,int grid_y,bool normed)
{Mat src = _src.getMat();int width = src.cols / grid_x;int height = src.rows / grid_y;//定义LBPH的行和列,grid_x*grid_y表示将图像分割成这么些块,numPatterns表示LBP值的模式种类Mat result = Mat::zeros(grid_x * grid_y,numPatterns,CV_32FC1);if(src.empty()){return result.reshape(1,1);}int resultRowIndex = 0;//对图像进行分割,分割成grid_x*grid_y块,grid_x,grid_y默认为8for(int i=0;i<grid_x;i++){for(int j=0;j<grid_y;j++){//图像分块Mat src_cell = Mat(src,Range(i*height,(i+1)*height),Range(j*width,(j+1)*width));//计算直方图Mat hist_cell = getLocalRegionLBPH(src_cell,0,(numPattern-1),true);//将直方图放到result中Mat rowResult = result.row(resultRowIndex);hist_cell.reshape(1,1).convertTo(rowResult,CV_32FC1);resultRowIndex++;}}return result.reshape(1,1);
}//计算一个LBP特征图像块的直方图
Mat getLocalRegionLBPH(const Mat& src,int minValue,int maxValue,bool normed)
{//定义存储直方图的矩阵Mat result;//计算得到直方图bin的数目,直方图数组的大小int histSize = maxValue - minValue + 1;//定义直方图每一维的bin的变化范围float range[] = { static_cast<float>(minValue),static_cast<float>(maxValue + 1) };//定义直方图所有bin的变化范围const float* ranges = { range };//计算直方图,src是要计算直方图的图像,1是要计算直方图的图像数目,0是计算直方图所用的图像的通道序号,从0索引//Mat()是要用的掩模,result为输出的直方图,1为输出的直方图的维度,histSize直方图在每一维的变化范围//ranges,所有直方图的变化范围(起点和终点)calcHist(&src,1,0,Mat(),result,1,&histSize,&ranges,true,false);//归一化if(normed){result /= (int)src.total();}//结果表示成只有1行的矩阵return result.reshape(1,1);
}除了以上几种比较经典的LBP特征外,还有诸多变种,如TLBP(中心像素与周围所有像素比较,而不是根据采样点的数目),DLBP(编码4邻域的灰度变化,每个方向上用两个比特编码),MLBP(将中心像素值替换为采样点像素的平均值),VLBP,RGB-LBP等。
LBP特征的应用
目标检测
人脸检测中比较典型的模型是Haar特征 + AdaBoost分类器,目前OpenCV也支持LBP + AdaBoost和HOG + AdaBoost的方法进行目标检测,而且LBP特征的训练速度较快,适用于实时检测场景。
人脸识别
人脸识别中LBP特征向量主要是用于直方图的比较,通过距离度量的方式(例如方差)找到训练数据中与输入图像距离最小的特征向量,将其对应的类别作为识别结果输出。
reference
- Paper: Gray Scale and Rotation Invariant Texture Classification with Local Binary Patterns
- Paper: Multiresolution Gray Scale and Rotation Invariant Texture Classification with Local Binary Patterns
- Paper: Face Recognition with Local Binary Patterns
- Paper: Learning Multi-scale Block Local Binary Patterns for Face Recognition
- http://www.voidcn.com/blog/quincuntial/article/p-4988349.html
- http://blog.csdn.net/zouxy09/article/details/7929531
- http://blog.jasonding.top/2014/11/04/Machine%20Learning/%E3%80%90%E8%AE%A1%E7%AE%97%E6%9C%BA%E8%A7%86%E8%A7%89%E3%80%91LBP%E7%BA%B9%E7%90%86%E7%89%B9%E5%BE%81/
- http://blog.csdn.net/liulina603/article/details/8291105
图像特征提取之LBP特征相关推荐
- 提取lbp特征java代码_目标检测的图像特征提取之_LBP特征
LBP(Local Binary Pattern,局部二值模式)是一种用来描述图像局部纹理特征的算子:它具有旋转不变性和灰度不变性等显著的优点.它是首先由T. Ojala, M.Pietikäinen ...
- 【机器学习】(十七)非负矩阵分解NMF:人脸图像特征提取、用特征排序;还原混合信号
非负矩阵分解(NMF)是一种无监督学习算法,目的在于提取有用的特征(可以识别出组合成数据的原始分量),也可以用于降维,通常不用于对数据进行重建或者编码. 与PCA相同,NMF将每个数据点写成一些分量的 ...
- 图像特征提取(纹理特征)
图像纹理特征总体简述 纹理是一种反映图像中同质现象的视觉特征,它体现了物体表面的具有缓慢变化或者周期性变化的表面结构组织排列属性 纹理具有三大标志: 某种局部序列性不断重复 非随机排列 纹理区域内大致 ...
- 图像特征提取之LoG特征
对于做模式识别来说,特征的提取是最为关键的一个步骤.想了想,结合自己的开发经历,就写写各个算子. 首先是LOG特征. 1.图像的一阶导数 对于连续的情况,其微分表达式为: 对于离散的情况: 2.图像的 ...
- 图像特征提取之Haar特征_人脸识别
1.Haar-like特征 Haar-like特征最早是由Papageorgiou等应用于人脸表示,Viola和Jones在此基础上,使用3种类型4种形式的特征. Haar特征分为三类:边缘特征.线性 ...
- OpenCV + CPP 系列(卅九)图像特征提取(Haar特征)
文章目录 Haar特征介绍(Haar Like Features) Haar特征介绍(Haar Like Features) Haar特征是一种反映图像的灰度变化的,像素分模块求差值的一种特征.它分为 ...
- 特征提取算法——LBP(Local Binary Pattern)局部二值模式学习笔记
在上Computer Vision lecture的时候,讲师介绍了LBP算子,这里对他进行简单的介绍. LBP(Local Binary Pattern) 局部二制模式,是描述图像局部纹理特征的算子 ...
- 图像特征提取与描述_角点特征04:LBP算法+HOG特征算子
1.LBP算法 LBP(Local Binary Pattern)指局部二值模式,是一种用来描述图像局部特征的算子,LBP特征具有灰度不变性和旋转不变性等显著优点.它是由T. Ojala, M.Pie ...
- 图像特征提取三大法宝:HOG特征、LBP特征、Haar-like特征
(一)HOG特征 1.HOG特征: 方向梯度直方图(Histogram of Oriented Gradient, HOG)特征是一种在计算机视觉和图像处理中用来进行物体检测的特征描述子.它通过计算和 ...
- svm训练特征提取——图像特征提取三大法宝:HOG特征,LBP特征,Haar特征
图像特征提取三大法宝:HOG特征,LBP特征,Haar特征 一.HOG特征 1.HOG特征: 即局部归一化的梯度方向直方图,是一种对图像局部重叠区域的密集型描述符, 它通过计算局部区域的梯度方向直方图 ...
最新文章
- 正则表达式的基本入门
- android application 引起内存泄漏的原因
- C#获取邮件客户端保存的邮箱密码
- jQuery的祖先遍历
- Ubuntu 安装 Docker
- numpy求解矩阵的特征值和特征向量
- java ref 应用类型_Java四种引用类型
- 数据库外连接和内连接详解
- Emacs 配置 Python 编程环境
- 三菱PLC编程语言的特点
- 放弃国企工作、花2万参加培训班,只为挤进互联网大厂
- 7.11 不区分大小写的匹配
- 如何快速画出霍夫曼树
- 心形尺寸比例图解_标识牌尺寸大小及空间比例关系示意图与人体工程学
- kernel编译练习2:给ubuntu22升级5.19内核
- DOM详解(五):DOM常用对象
- 去除人声--安装和使用spleeter分离人声和背景声
- 远程PLC监控调试,PLC通用中转服务器,多客户端tcp中转 服务器源代码,socket多线程并发通讯
- 树莓派CM4_4G IO扩展板搭配广和通4G免驱模块ping包测试演示(Ubuntu Desktop)
- HTML5+CSS3网站设计教程 (张晓景,胡克) [iso]