SCARA机器人与 DELTA机器人
1、SCARA机器人
SCARA(Selective Compliance Assembly Robot Arm,中文译名:选择顺应性装配机器手臂)是一种圆柱坐标型的特殊类型的工业机器人。
1978年,日本山梨大学牧野洋发明SCARA,该机器人具有四个轴和四个运动自由度,(包括X,Y,Z方向的平动自由度和绕Z轴的转动自由度)。该系列的操作手在其动作空间的四个方向具有有限刚度,而在剩下的其余两个方向上具有无限大刚度。
SCARA系统在x,y方向上具有顺从性,而在Z轴方向具有良好的刚度,此特性特别适合于装配工作,例如将一个圆头针插入一个圆孔,故SCARA系统首先大量用于装配印刷电路板和电子零部件;SCARA的另一个特点是其串接的两杆结构,类似人的手臂,可以伸进有限空间中作业然后收回,适合于搬动和取放物件,如集成电路板等。
如今SCARA机器人还广泛应用于塑料工业、汽车工业、电子产品工业、药品工业和食品工业等领域。它的主要职能是搬取零件和装配工作。它的第一个轴和第二个轴具有转动特性,第三和第四个轴可以根据工作的需要的不同,制造成相应多种不同的形态,并且一个具有转动、另一个具有线性移动的特性。由于其具有特定的形状,决定了其工作范围类似于一个扇形区域。
SCARA机器人可以被制造成各种大小,最常见的工作半径在100毫米至1000毫米之间,此类的SCARA机器人的净载重量在1千克至200千克之间。
The SCARA acronym stands for Selective Compliant Assembly Robot Arm and is one that is hard to remember. It's also sometimes referred to as: Selective Compliant Articulated Robot Arm.
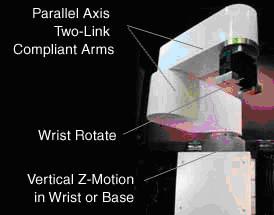
In general, traditional SCARA’s are 4-axis robot arms, i.e., they can move to any X-Y-Z coordinate within their work envelope. There is a fourth axis of motion which is the wrist rotate (Theta-Z). The ‘X’, ‘Y’ and the ‘Theta-Z’ movements are obtained with three parallel-axis rotary joints. The vertical motion is usually an independent linear axis at the wrist or in the base.
By virtue of the SCARA’s parallel-axis joint layout, the arm is slightly compliant in the X-Y direction but rigid in the ‘Z’ direction, hence the term: Selective Compliant. This is advantageous for many types of assembly operations, e.g., inserting a round pin in a round hole without binding.
The second attribute of the SCARA is the jointed two-link arm layout similar to our human arms, hence the often-used term, Articulated. This feature allows the arm to extend into confined areas and then retract or “fold up” out of the way. This is advantageous for transferring parts from one cell to another or for loading/ unloading process stations that are enclosed.
SCARA’s are generally faster and cleaner than comparable Cartesian systems. Their single pedestal mount requires a small footprint and provides an easy, unhindered form of mounting. On the other hand, SCARA's can be more expensive than comparable Cartesian systems and the controlling software requires inverse kinematics for linear interpolated moves. This software typically comes with the SCARA though and is usually transparent to the end-user

2、DELTA机器人
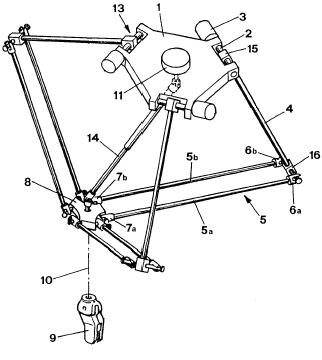
Delta机器人就像一个倒挂的有三个脚的蜘蛛,因其的灵巧、速度和精确在装配、自动化和医疗设备领域得到应用。但是由于其发明专利控制在少部分人手里,Delta并没有得到应有的推广。最近,Delta机器人机构设计的专利即将到期,使其他制造商有机会生产类似Delta的机器人装置。
SCARA机器人与 DELTA机器人相关推荐
- delta机器人与matlab仿真(一)
delta机器人与matlab仿真(一) delta机器人描述 运动分析 matlab实现 delta机器人描述 Delta 机器人是典型的空间三自由度(X,Y,Z平移运动)的并联机构,特点是自重负荷 ...
- 六轴机器人直角坐标系建立_详解|六轴机器人,SCARA机器人,直角坐标机器人和 Delta机器人...
原标题:详解|六轴机器人,SCARA机器人,直角坐标机器人和 Delta机器人 一.六轴工业机器人 六轴工业机器人的最大的工作空间类似一个球体,它可以将机械手臂末端工具以几乎任意角度放置在接近无限数量 ...
- 【机器人学习】Delta机器人三维模型+正逆运动学分析+matlab代码
模型与代码下载地址 https://download.csdn.net/download/yjw0911/85003278 1.三维模型 正逆运动分析过程: Delta机器人三维模型+正逆运动学分析+ ...
- Delta机器人:运动学正反解分析
Delta机器人:运动学正反解分析 一.Delta机构简介 Delta机构是并联机构中的一种典型机构,起原始结构如图1所示.Delta机构由R.Clavel 博士在 1985年发明,是现在并联机器人中 ...
- Delta机器人结构分析及其运动学原理推导
一.结构模型及其约束分析 传统Delta机器人结构如图1: 图1.Delta机器人结构模型 Delta机器人为并联结构,由三条从动臂组成.上从动臂由电机驱动,可以看作连杆,只能产生绕着电机轴向的旋转运 ...
- Delta机器人的建模与动态仿真(3)
目录 一.SolidWorks软件介绍 二.Matlab环境建模仿真 1.上平台移动的门行轨迹仿真 2.上平台固定的门行轨迹仿真 3.SolidWorks环境建模仿真 总结 源码链接 一.SolidW ...
- delta机械臂,delta机器人,运动控制器,运动控制卡 本卡采用前瞻运动轨迹规划,运动采用G代码指令编程,具有G5三维空间的圆弧插补,空间直线插补功能
delta机械臂,delta机器人,运动控制器,运动控制卡 本卡采用前瞻运动轨迹规划,运动采用G代码指令编程,具有G5三维空间的圆弧插补,空间直线插补功能,子程序编程功能,逻辑判断语句功能,示教编程功 ...
- Delta机器人的运动学分析
Delta机器人的运动学分析 @(1@Personal)[DeltaRobot,BLOG] 暂时放出位置分析,稍后更新速度及加加速度分析. 约定 机构简述 The delta robot consis ...
- mBlock机器人组装教程_如何使用Makeblock构造Delta机器人
步骤1:材料列表 机械零件清单: 3×42蓝色步进电机支架 6×梁0824-496 12×梁0824-160 6×光束0824-144 3×光束0824-96 3×光束0824-6 6×光束0824- ...
最新文章
- Nat. Med.:iHMP之“微生物组与早产”
- Metasploit log命令技巧
- 初识Mongodb总结
- mybatis-plus学习记录(详细)
- 防火墙firewalld
- oracle unused 语法_Oracle教程之设置为unused 后如何恢复 ?
- IBM 推出世界最小电脑,应用区块链技术防偷骗!
- perl亲身试验ini---使用perl读写配置文件
- 不要抱怨,每个人的人生都不完美
- [C# 线程处理系列]专题四:线程同步
- ATL 线程触发事件解决方案
- 【读书】如何阅读一本书
- 在X79 LGA2011上改造安装利民AX120R LGA1200风扇
- html添加田字,兆加页(是加三个田是什么字)
- You can't specify target table 'sdb_goods' for update in FROM clause
- pano2vr无法输出html5,教大家Pano2VR怎么输出全景图的方法
- 经济预测与决策matlab试题,经济预测与决策技术及MATLAB实现第5章 投入产出预测法.ppt...
- arm交叉编译ntpdate与服务器进行时间同步
- Python手写强化学习Q-learning算法玩井字棋
- matlab求点,MATLAB求两点中点