基于STM32的四足机器人
1.前言
因为今年暑假要参加电赛,报上了名,选好了指导老师,但是由于和指导老师不熟,所以此约了一个时间过去聊聊,顺便问问如何准备电赛,去了之后,老师交给我了一个任务,控制这个四足机器人进行运动,先前这个机器人的控制板采用的是ESP8266,基于Arduino平台开发的,而我的任务就是,重新绘制PCB,同时采用STM32来进行控制。
![]()
2.选择方案
1.主控MCU的选择
首先是主控,STM32,我选择的是103C8T6,由于最近几个月,半导体行业产能严重不足,导致芯片价格疯涨,所以先不打算集成STM32到PCB上,而是打算先画一块主板底座,把开发板插上去,一点是因为手里没有其他合适的板子,还有一点就是如果等这版成功了,就可以把32集成上去了,免得第一次直接集成上去,结果板子画的有问题,又要拖时间。
![]()
2.无线控制以及附加模块
之前的板子是ESP8266可以联网的,那么基于STM32的话,我打算采用蓝牙模块,同时再在板子上放一个OLED,方便我调试,以及后期显示一些信息,如当前运动状态以及电池电量,蓝牙模块我选的是一个从机蓝牙,省钱,而且编程简单,只需要配置串口,然后接收数据就行了。
![]()
3.硬件以及软件控制分析
因为机器人需要独立供电,所以用到了锂电池,既然是锂电池,那么一定需要一个锂电池充电电路了,一般锂电池用的充电芯片是TP4056,所以去找了这个芯片的数据手册,找到了这个芯片的典型应用。
![]()
资料里说如果在充电,7脚会被拉到低电平,那么红色LED就会亮,电池充满电了,6就会被拉到低电平,绿灯亮,如果想调节充电电流,通俗点就是充电速度,只需改变2脚的电阻即可。因为我选用的锂电池是400MA的,一般来说充电电流为0.34倍的C,最为合适,我的是400MA,那么充电电流应该是400*0.34=136ma,可是后面板子出来后,充电实在太慢了,我就把电阻换成了2K的。
![]()
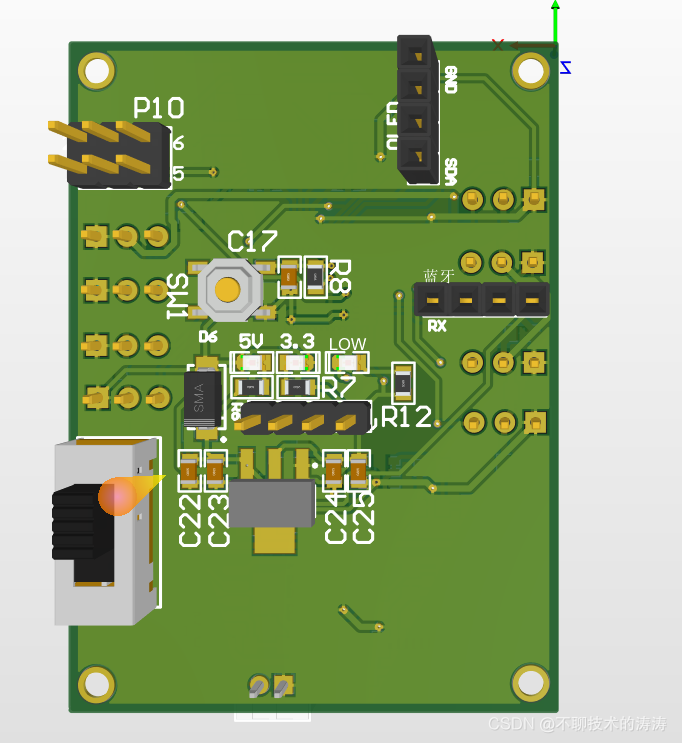
东西基本做完了,博客烂尾了,拖了太久,不想写了,演示视频找不到了,附上几张板子照片
没有集成OLED版本
![]()
![]()
![]()
![]()
![]()
![]()
代码部分
其实没什么东西,主要是你需要把机器人前进后退,以及左右运动的步伐给分析出来,然后转换成对应的PWM的值,存到数组里,然后遍历出来给舵机,让其逐步运行。
![]()
![]()
![]()
基于STM32的四足机器人相关推荐
- 四足机器人|机器狗|仿生机器人|多足机器人|Adams仿真|Simulink仿真|基于CPG的四足机器人Simulink与Adams虚拟样机|源码可直接执行|绝对干货!需要资料及指导的可以联系我!
四足机器人|机器狗|仿生机器人|多足机器人|基于CPG的四足机器人Simulink与Adams虚拟样机|源码可直接执行|绝对干货!需要资料及指导的可以联系我!QQ:1096474659 基于CPG的四 ...
- matlab四足仿真,基于MATLAB的四足机器人建模与仿真.docx
摘要:本课题讨论了一种利用MATLAB中Robotics Toolbox对机器人进行的仿真建模的技术,对四足机器人进行行仿真建模.通过设计确定主要研究对象为哺乳类四足机器人.确定了机器人的腿部关节结构 ...
- 基于STM32与PCA9685制作四足机器人(代码开源)
前言:本文为手把手教学基于STM32的四足机器人项目--JDY-31蓝牙控制,特别地,本次项目采用的是STM32作为MCU.四足机器人的支架为3D打印件,SG90舵机驱动机器人实现姿态 ...
- 四足机器人——12自由度舵机狗DIY(二)
目录 一.四足机器人步态研究控制的现状 1.1目前的三种控制策略 <1>基于静态稳定的控制方法. <2>基于动力学模型的控制方法. <3>基于生物所具有的神经性调节 ...
- 技术分享 | 什么是Minitaur四足机器人?
什么是Minitaur四足机器人? Minitaur是Ghost Robotics早期研制的一款高性能小型四足机器人,其虽然仅具有8个自由度但是却有着非比寻常的运动能力和不输于MIT猎豹的越障.空翻能 ...
- 物联网毕业设计 - 基于STM32的轮足两用可变形环境感知探测机器人
⭐️基于STM32的轮足两用可变形环境感知探测机器人⭐️ STM32F405主控芯片 ZMOD4410气体传感器 无线图传模块 安卓手机APP 电机驱动模块 摄像头模块 霍尔传感器 LED模块 蜂鸣器 ...
- [灯哥开源—四足机器人]程序算法讲解与STM32移植——PA_TROT和PA_WALK讲解和trot步态,walk步态,步态规划
关键词:trot步态,walk步态,步态规划 目录 步态基础概念介绍 TROT步态原理 TROT代码实现 WALK步态原理 WALK代码实现 引用文献: 写在前面 这篇文章介绍的是,这篇文章https ...
- 运动学逆解,VMC算法,计算舵机角度输出文件PA_IK和PA_VMC讲解——[灯哥开源—四足机器人]程序算法讲解与STM32移植
目录 写在前面 运动学逆解原理 运动学逆解PA_IK代码实现 VMC算法原理 VMC代码实现 引用文献: 写在前面 本篇文章介绍的是,运动控制线程padog.py的逻辑顺序这篇文章中如红框所示的部分 ...
- MIT四足机器人MIT Cheetah的硬件框架
前几天小米的铁蛋,又让四足机器人火了一把.9999一台,这个价钱还挺香的.众所周知,国内的大部分四足机器狗的涌出,都是因为2019年,MIT的猎豹开源,从硬件到软件.国内四足机器人的研发也就上了一个台 ...
最新文章
- java整数常量区_在Java中,我可以用二进制格式定义一个整数常量吗?
- 2018未来科学大奖揭晓:袁隆平、马大为、林本坚等7位科学家获奖
- ContentType 列表
- JavaScript Tween算法及缓动效果
- Dvtm -- 平铺式终端
- C语言语句知识结构大学霸IT达人
- Oracle的rownum原理和使用(整理几个达人的帖子)
- python掷骰子_用于掷骰子的Python程序(2人骰子游戏)
- Java的Servlet、Filter、Interceptor、Listener
- 使用Symantec Altiris 来监控 Dell 服务器 的 硬件
- java 输出字符集合里的字_Java基础 -- 字符串(格式化输出、正则表达式)(示例代码)...
- 主板定制X86嵌入式器件选型
- 地图旋转_人类一败涂地手游:地图冰进阶攻略,团队配合与齐心协力缺一不可...
- Python-数据类型-4 第七次全国人口普查数据分析
- 技巧篇:常用的vba代码汇总
- 基带信号带宽与占空比的关系
- 让Firefox未载入图片显示边框
- C语言 - 输入x的值,输出y相应的值 x (x<1) y= 2x-1 (1≤x<10) 3x-11 (x≥10)
- 牛顿二项式定理(广义二项式定理)
- Excel数据分析(一)公式错误值与解决办法
热门文章
- DataTable常用数据筛选方法
- Peekaboo—站立式会议+alpha冲刺:Day3冲刺随笔
- 如何跳过计算机配置直接开机,怎么跳过Windows update配置直接开机?
- 邓俊辉算法训练营第三期(带完整课件)
- Python3批量修改图片像素
- C语言调试openssl ,打印错误方法
- Leetcode-二分+递归/回溯-1723. 完成所有工作的最短时间
- [Android 9][markw] 红米4高配版 刷入Lineage OS 16与OpenGApps
- ai修复照片软件是哪个软件_AI照片修复免费版-AI照片修复软件下载v1.1.0安卓版-西西软件下载...
- Android-MMS中彩信附件的格式及分析