学习OpenCV——BOW特征提取函数(特征点篇)
没日没夜的改论文生活终于要告一段落了,比起改论文,学OpenCV就是一件幸福的事情。OpenCV的发展越来越完善了,已经可以直接使用BOW函数来进行对象分类了。
简单的通过特征点分类的方法:
一、train
1.提取+/- sample的feature,每幅图提取出的sift特征个数不定(假设每个feature有128维)
2.利用聚类方法(e.g K-means)将不定数量的feature聚类为固定数量的(比如10个)words即BOW(bag of word)
(本篇文章主要完成以上的工作!)
3.normalize,并作这10个类的直方图e.g [0.1,0.2,0.7,0...0];
4.将each image的这10个word作为feature_instance 和 (手工标记的) label(+/-)进入SVM训练
二、predict
1. 提取test_img的feature(如137个)
2. 分别求each feature与10个类的距离(e.g. 128维欧氏距离),确定该feature属于哪个类
3. normalize,并作这10个类的直方图e.g [0,0.2,0.2,0.6,0...0];
4. 应用SVM_predict进行结果预测
通过OpenCV实现feature聚类 BOW
首先在此介绍一下OpenCV的特征描述符与BOW的通用函数。
主要的通用接口有:
1.特征点提取
Ptr<FeatureDetector> FeatureDetector::create(const string& detectorType)
- Ptr<FeatureDetector> FeatureDetector::create(const string& detectorType)
- // "FAST" – FastFeatureDetector
- // "STAR" – StarFeatureDetector
- // "SIFT" – SIFT (nonfree module)//必须使用 initModule_nonfree()初始化
- // "SURF" – SURF (nonfree module)//同上;
- // "ORB" – ORB
- // "MSER" – MSER
- // "GFTT" – GoodFeaturesToTrackDetector
- // "HARRIS" – GoodFeaturesToTrackDetector with Harris detector enabled
- // "Dense" – DenseFeatureDetector
- // "SimpleBlob" – SimpleBlobDetector
根据以上接口,测试不同的特征点:
对同一幅图像进行水平翻转前后的两幅图像检测特征点检测结果,
检测到的特征点的坐标类型为:pt: int / float(与keyPoint的性质有关)
数量分别为num1, num2,
"FAST" – FastFeatureDetector pt:int (num1:615 num2:618)
"STAR" – StarFeatureDetector pt:int (num1:43 num2:42 )
"SIFT" – SIFT (nonfree module) pt:float(num1:155 num2:135) //必须使用 initModule_nonfree()初始化
"SURF" – SURF (nonfree module) pt:float(num1:344 num2:342) //同上;
"ORB" – ORB pt:float(num1:496 num2:497)
"MSER" – MSER pt:float(num1:51 num2:45 )
"GFTT" – GoodFeaturesToTrackDetector pt:int (num1:744 num2:771)
"HARRIS" – GoodFeaturesToTrackDetector with Harris detector enabled pt:float(num1:162 num2:160)
"Dense" – DenseFeatureDetector pt:int (num1:3350 num2:3350)
2.特征描述符提取
Ptr<DescriptorExtractor> DescriptorExtractor::create(const string& descriptorExtractorType)
- // Ptr<DescriptorExtractor> DescriptorExtractor::create(const string& descriptorExtractorType)
- // "SIFT" – SIFT
- // "SURF" – SURF
- // "ORB" – ORB
- // "BRIEF" – BriefDescriptorExtractor
3.描述符匹配
Ptr<DescriptorMatcher> descriptorMatcher = DescriptorMatcher::create(const string& descriptorMatcherType)
- // descriptorMatcherType – Descriptor matcher type.
- // Now the following matcher types are supported:
- // BruteForce (it uses L2 )
- // BruteForce-L1
- // BruteForce-Hamming
- // BruteForce-Hamming(2)
- // FlannBased
- Ptr<DescriptorMatcher> descriptorMatcher = DescriptorMatcher::create( "BruteForce" );
4.class BOWTrainer
class BOWKmeansTrainer::public BOWTrainer:Kmeans算法训练
BOWKMeansTrainer ::BOWKmeansTrainer(int clusterCount, const TermCriteria& termcrit=TermCriteria(), int attempts=3, int flags=KMEANS_PP_CENTERS)¶
parameter same as Kmeans
代码实现:
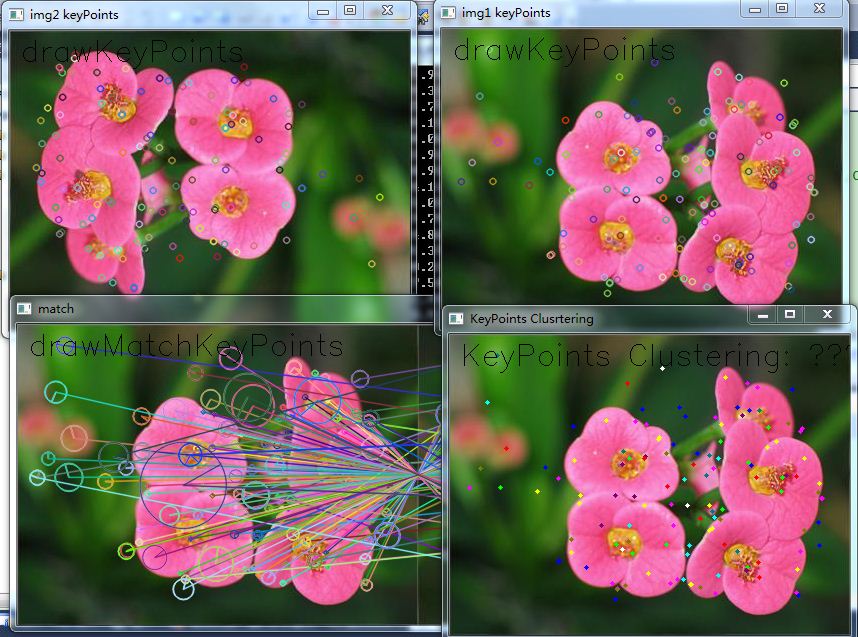
1.画特征点。
2.特征点Kmeans聚类,每一种颜色代表一个类别。
- #include "opencv2/highgui/highgui.hpp"
- #include "opencv2/calib3d/calib3d.hpp"
- #include "opencv2/imgproc/imgproc.hpp"
- #include "opencv2/features2d/features2d.hpp"
- #include "opencv2/nonfree/nonfree.hpp"
- #include <iostream>
- using namespace cv;
- using namespace std;
- #define ClusterNum 10
- void DrawAndMatchKeypoints(const Mat& Img1,const Mat& Img2,const vector<KeyPoint>& Keypoints1,
- const vector<KeyPoint>& Keypoints2,const Mat& Descriptors1,const Mat& Descriptors2)
- {
- Mat keyP1,keyP2;
- drawKeypoints(Img1,Keypoints1,keyP1,Scalar::all(-1),0);
- drawKeypoints(Img2,Keypoints2,keyP2,Scalar::all(-1),0);
- putText(keyP1, "drawKeyPoints", cvPoint(10,30), FONT_HERSHEY_SIMPLEX, 1 ,Scalar :: all(-1));
- putText(keyP2, "drawKeyPoints", cvPoint(10,30), FONT_HERSHEY_SIMPLEX, 1 ,Scalar :: all(-1));
- imshow("img1 keyPoints",keyP1);
- imshow("img2 keyPoints",keyP2);
- Ptr<DescriptorMatcher> descriptorMatcher = DescriptorMatcher::create( "BruteForce" );
- vector<DMatch> matches;
- descriptorMatcher->match( Descriptors1, Descriptors2, matches );
- Mat show;
- drawMatches(Img1,Keypoints1,Img2,Keypoints2,matches,show,Scalar::all(-1),CV_RGB(255,255,255),Mat(),4);
- putText(show, "drawMatchKeyPoints", cvPoint(10,30), FONT_HERSHEY_SIMPLEX, 1 ,Scalar :: all(-1));
- imshow("match",show);
- }
- //测试OpenCV:class BOWTrainer
- void BOWKeams(const Mat& img, const vector<KeyPoint>& Keypoints,
- const Mat& Descriptors, Mat& centers)
- {
- //BOW的kmeans算法聚类;
- BOWKMeansTrainer bowK(ClusterNum,
- cvTermCriteria (CV_TERMCRIT_EPS + CV_TERMCRIT_ITER, 10, 0.1),3,2);
- centers = bowK.cluster(Descriptors);
- cout<<endl<<"< cluster num: "<<centers.rows<<" >"<<endl;
- Ptr<DescriptorMatcher> descriptorMatcher = DescriptorMatcher::create( "BruteForce" );
- vector<DMatch> matches;
- descriptorMatcher->match(Descriptors,centers,matches);//const Mat& queryDescriptors, const Mat& trainDescriptors第一个参数是待分类节点,第二个参数是聚类中心;
- Mat demoCluster;
- img.copyTo(demoCluster);
- //为每一类keyPoint定义一种颜色
- Scalar color[]={CV_RGB(255,255,255),
- CV_RGB(255,0,0),CV_RGB(0,255,0),CV_RGB(0,0,255),
- CV_RGB(255,255,0),CV_RGB(255,0,255),CV_RGB(0,255,255),
- CV_RGB(123,123,0),CV_RGB(0,123,123),CV_RGB(123,0,123)};
- for (vector<DMatch>::iterator iter=matches.begin();iter!=matches.end();iter++)
- {
- cout<<"< descriptorsIdx:"<<iter->queryIdx<<" centersIdx:"<<iter->trainIdx
- <<" distincs:"<<iter->distance<<" >"<<endl;
- Point center= Keypoints[iter->queryIdx].pt;
- circle(demoCluster,center,2,color[iter->trainIdx],-1);
- }
- putText(demoCluster, "KeyPoints Clustering: 一种颜色代表一种类型",
- cvPoint(10,30), FONT_HERSHEY_SIMPLEX, 1 ,Scalar :: all(-1));
- imshow("KeyPoints Clusrtering",demoCluster);
- }
- int main()
- {
- cv::initModule_nonfree();//使用SIFT/SURF create之前,必须先initModule_<modulename>();
- cout << "< Creating detector, descriptor extractor and descriptor matcher ...";
- Ptr<FeatureDetector> detector = FeatureDetector::create( "SIFT" );
- Ptr<DescriptorExtractor> descriptorExtractor = DescriptorExtractor::create( "SIFT" );
- Ptr<DescriptorMatcher> descriptorMatcher = DescriptorMatcher::create( "BruteForce" );
- cout << ">" << endl;
- if( detector.empty() || descriptorExtractor.empty() )
- {
- cout << "Can not create detector or descriptor exstractor or descriptor matcher of given types" << endl;
- return -1;
- }
- cout << endl << "< Reading images..." << endl;
- Mat img1 = imread("D:/demo0.jpg");
- Mat img2 = imread("D:/demo1.jpg");
- cout<<endl<<">"<<endl;
- //detect keypoints;
- cout << endl << "< Extracting keypoints from images..." << endl;
- vector<KeyPoint> keypoints1,keypoints2;
- detector->detect( img1, keypoints1 );
- detector->detect( img2, keypoints2 );
- cout <<"img1:"<< keypoints1.size() << " points img2:" <<keypoints2.size()
- << " points" << endl << ">" << endl;
- //compute descriptors for keypoints;
- cout << "< Computing descriptors for keypoints from images..." << endl;
- Mat descriptors1,descriptors2;
- descriptorExtractor->compute( img1, keypoints1, descriptors1 );
- descriptorExtractor->compute( img2, keypoints2, descriptors2 );
- cout<<endl<<"< Descriptoers Size: "<<descriptors2.size()<<" >"<<endl;
- cout<<endl<<"descriptor's col: "<<descriptors2.cols<<endl
- <<"descriptor's row: "<<descriptors2.rows<<endl;
- cout << ">" << endl;
- //Draw And Match img1,img2 keypoints
- //匹配的过程是对特征点的descriptors进行match;
- DrawAndMatchKeypoints(img1,img2,keypoints1,keypoints2,descriptors1,descriptors2);
- Mat center;
- //对img1提取特征点,并聚类
- //测试OpenCV:class BOWTrainer
- BOWKeams(img1,keypoints1,descriptors1,center);
- waitKey();
- }
通过Qt实现DrawKeypoints:
- void Qt_test1::on_DrawKeypoints_clicked()
- {
- //initModule_nonfree();
- Ptr<FeatureDetector> detector = FeatureDetector::create( "FAST" );
- vector<KeyPoint> keypoints;
- detector->detect( src, keypoints );
- Mat DrawKeyP;
- drawKeypoints(src,keypoints,DrawKeyP,Scalar::all(-1),0);
- putText(DrawKeyP, "drawKeyPoints", cvPoint(10,30),
- FONT_HERSHEY_SIMPLEX, 0.5 ,Scalar :: all(255));
- cvtColor(DrawKeyP, image, CV_RGB2RGBA);
- QImage img = QImage((const unsigned char*)(image.data),
- image.cols, image.rows, QImage::Format_RGB32);
- QLabel *label = new QLabel(this);
- label->move(50, 50);//图像在窗口中所处的位置;
- label->setPixmap(QPixmap::fromImage(img));
- label->resize(label->pixmap()->size());
- label->show();
- }
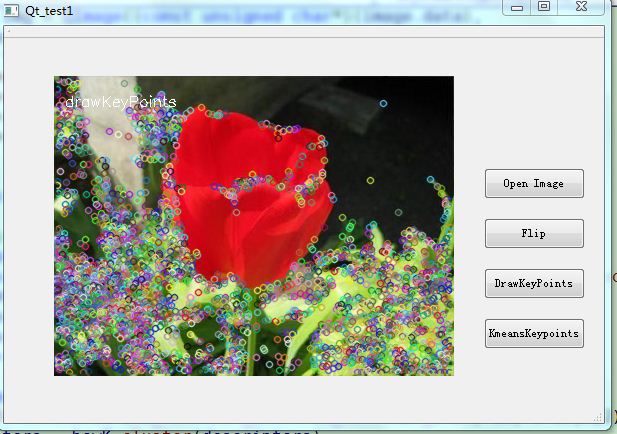
由于initModule_nonfree()总是出错,无法对SIFT与SURF特征点提取,
而且无法实现聚类因为运行/BOW的kmeans算法聚类:BOWKMeansTrainer bowK(ClusterNum, cvTermCriteria (CV_TERMCRIT_EPS + CV_TERMCRIT_ITER, 10, 0.1),3,2);总是出错,不知道咋解决~~~~~(>_<)~~~~ 需要继续学习
from: http://blog.csdn.net/yangtrees/article/details/8456237
转载于:https://www.cnblogs.com/GarfieldEr007/p/5401859.html
学习OpenCV——BOW特征提取函数(特征点篇)相关推荐
- 学习|OpenCV图片修复函数inpaint
学更好的别人, 做更好的自己. --<微卡智享> 本文长度为2020字,预计阅读6分钟 OpenCV图片修复 最近重新学习OpenCV的基础,偶然间发现了npaint的函数,于是就自己做了 ...
- opencv Fast特征提取函数
在opencv中,Fast特征提取器的函数原型: static Ptr<FastFeatureDetector> cv::FastFeatureDetector::create ( int ...
- 【学习OpenCV】warpAffine函数实现图像旋转
理论 http://www.cnblogs.com/wangguchangqing/p/4045150.html 翻开任意一本图像处理的书,都会讲到图像的几何变换,这里面包括:仿射变换(affine ...
- 学习OpenCV——粒子滤波(网上两篇文章总结)
粒子滤波的理论实在是太美妙了,用一组不同权重的随机状态来逼近复杂的概率密度函数.其再非线性.非高斯系统中具有优良的特性.opencv给出了一个实现,但是没有给出范例,学习过程中发现网络上也找不到.le ...
- 【学习OpenCV】flip函数、镜像操作
矩阵(图像)镜像(翻转) cv::flip void flip(InputArray src, OutputArray dst, int flipCode) 参数: src,输入矩阵 dst,翻转后矩 ...
- 深度学习(一)K-means特征学习
Deep Learning论文笔记之(一)K-means特征学习 自己平时看了一些论文,但老感觉看完过后就会慢慢的淡忘,某一天重新拾起来的时候又好像没有看过一样.所以想习惯地把一些感 ...
- 【学习OpenCV4】如何学习OpenCV
OpenCV是应用非常广泛的开源视觉处理库,在图像处理.计算机视觉和自动驾驶中有着非常重要的作用. 废话不多说,我就来讲讲OpenCV的使用和学习需要怎么做吧,大家觉得有道理的可以参考一下. 我理解的 ...
- 结合openCV学习DIP之传统图像特征与匹配
前言 关于图像的预处理部分参考 结合opencv学习DIP 概述 该笔记主要是基于DIP理论➕openCV实现,学习该笔记首先要确保通读DIP理论,并由自己的话描述相关知识,并且掌握o ...
- 【OpenCV学习】(十)特征点检测与匹配
[OpenCV学习](十)特征点检测与匹配 背景 提取图像的特征点是图像领域中的关键任务,不管在传统还是在深度学习的领域中,特征代表着图像的信息,对于分类.检测任务都是至关重要的: 特征点应用的一些场 ...
最新文章
- Redis 笔记(13)— scan 和 keys 寻找特定前缀key 字段(命令格式、使用示例、定位大key)
- HikariCP为什么自己造了一个FastList?
- python语言是一种高级通用编程语言-2019年十大顶级编程语言:会这些的程序员薪资有多高?...
- oracle上机题库_Oracle数据库考试试题库
- 意大利终于付出了代价
- 微服务之:从零搭建ocelot网关和consul集群
- python输入input数组_python怎么输入数组
- vue.extend与vue.component的区别和联系
- linux急救模式_抢救Linux:我如何将组织介绍给Linux
- 显示所有大写字母python_python 输出所有大小写字母, range()以及列表切片
- mysql与sim900a_sim900a和sim800a的区别是什么
- socket通信问题
- 【html5期末大作业】基于HTML仿QQ音乐官网网站
- 百度云网盘-kyee_ye的分享
- 【计算机组成原理】计算机系统结构笔记:合集
- python中标点符号大全及名字_标点符号大全及名字0919.史上最全标点符号英语读法...
- 使用Python爬取网页图片
- (附源码)Springboot大学生综合素质测评系统 毕业设计 162308
- PHPExcel导入导出常用方法总结
- 人间清醒,内容为王 - 技术er究竟该如何写博客?1024上海嘉年华之敖丙演讲观后感。
热门文章
- gitlab releases
- TensorFlow tf.feature_column
- 4.5 面部验证与二分类
- python做界面用什么软件好_pyqt | 做一个好用的图形界面软件
- 通过bginfo小工具让用户自己查看用户名与IP地址信息
- Kubernetes学习总结(12)—— 学习 kubernetes 的10个技巧或建议
- 阿里电商架构演变之路(二)
- Spring Boot学习总结(8)——SpringBoot Common application properties(application.properties)详解
- MyBatis学习总结(20)——MyBatis完全使用指南
- Nginx学习总结(2)——Nginx手机版和PC电脑版网站配置