灰度图像--图像分割 阈值处理之OTSU阈值
 学习DIP第55天
学习DIP第55天
转载请标明本文出处:***http://blog.csdn.net/tonyshengtan ***,出于尊重文章作者的劳动,转载请标明出处!文章代码已托管,欢迎共同开发:https://github.com/Tony-Tan/DIPpro
更多图像处理机器学习内容请访问最新网站www.tony4ai.com
#开篇废话
废话开始,今天介绍OTSU算法,本算法比前面给出的算法更能够给出数学上的最佳阈值,不需要任何输入附加参数、与同样不需要输入附加参数的迭代均值和均值阈值来比较,OTSU给出的阈值能使分类更加均匀。
阈值处理将灰度值分为两类,而对于分类问题,已有的一种最优闭合解–贝叶斯决策规则。
#贝叶斯决策规则
首先介绍下贝叶斯公式的形象化理解,考虑下图
![]()
上面的12幅图中有手枪和弹夹,只有弹夹和手枪出现在同一个盒子的时候才有杀伤力,也就是你拿到一个盒子,你不知道里面是什么,有可能是枪,有可能是弹夹,有可能同时有枪和弹夹。下面来从概率学角度分析
设盒子里有枪为事件A,那么A出现的概率设为p(A)p(A)p(A)。
设盒子里有弹夹为事件B,那么B出现的概率设为p(B)p(B)p(B)。
那么同时出现事件A和事件B的概率为p(AB)p(AB)p(AB)
看图可以知道
$p(A)=\frac{8}{12}=\frac{2}{3} $..........(1) $p(B)=\frac{7}{12} $..........(2) $p(AB)=\frac{3}{12}=\frac{1}{4} $..........(3)
考虑我们随机抽出一个盒子,先拿出一个东西,比如先拿出一把枪,那么也就是事件A发生了,那么我们继续从盒子里拿东西,有可能拿到弹夹,也有可能啥也没有,那么拿到弹夹的概率就如下:
$p(B|A)=\frac{3}{8} $..........(4)
同理,如果先拿出来的是个弹夹,那么接下来拿出枪的概率是:
$p(A|B)=\frac{3}{7} $..........(5)
结合(1)(2)(3)(4)(5),可以得到:
$p(AB)=p(A|B)*p(B)=p(B|A)*p(A) $..........(6)
假设下面情形:
已知拿出枪的概率是:
$p(A)=\frac{2}{3} $
拿出枪以后拿出弹夹的概率
$p(B|A)=\frac{3}{8} $
拿出弹夹的概率:
$p(B)=\frac{7}{12} $
求拿出弹夹以后拿出枪的概率
$p(A|B)=\frac{p(B|A)*p(A)}{p(B)} $
以上就是贝叶斯公式的一般形式,更复杂的形式会在后面的文章中详细介绍。(更复杂的形式是指盒子里有枪,子弹,弹夹,手榴弹。。。。。。)
#数学原理
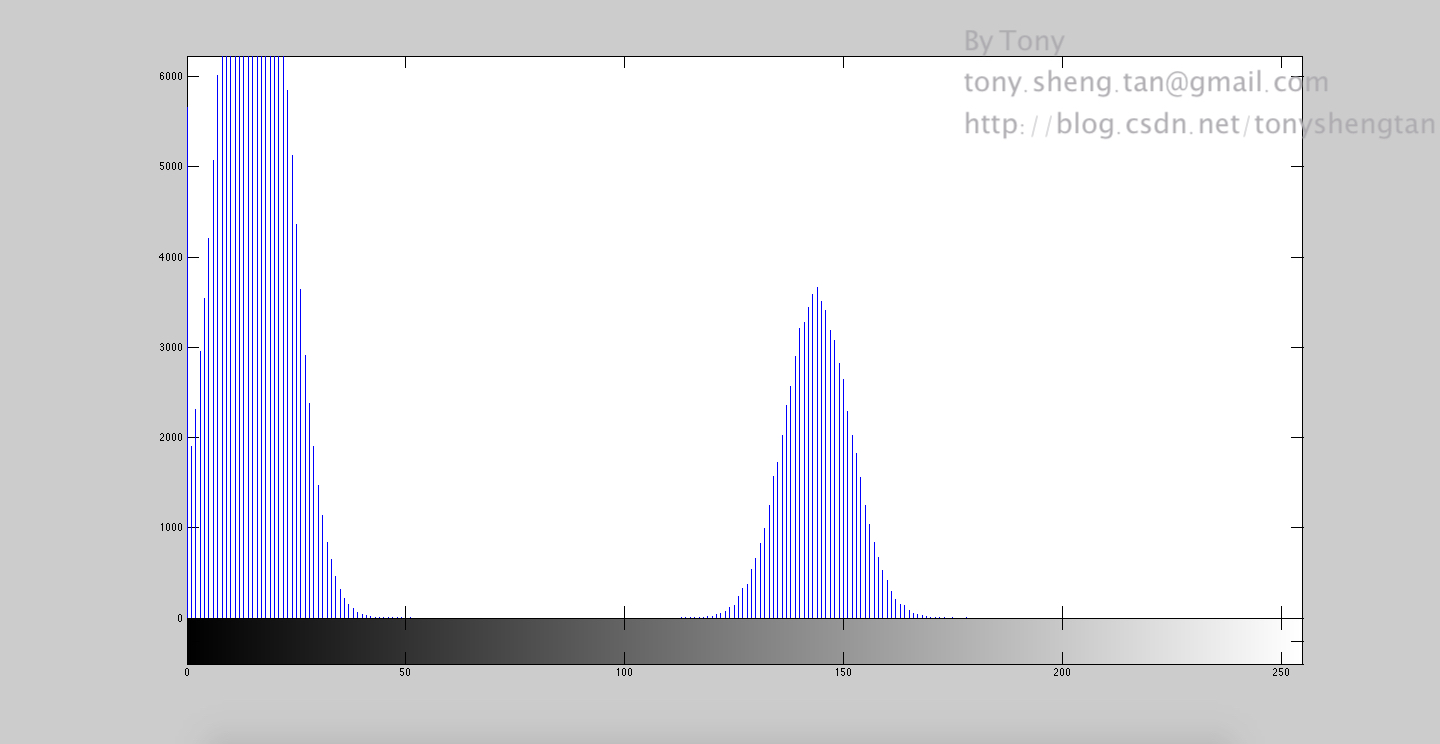
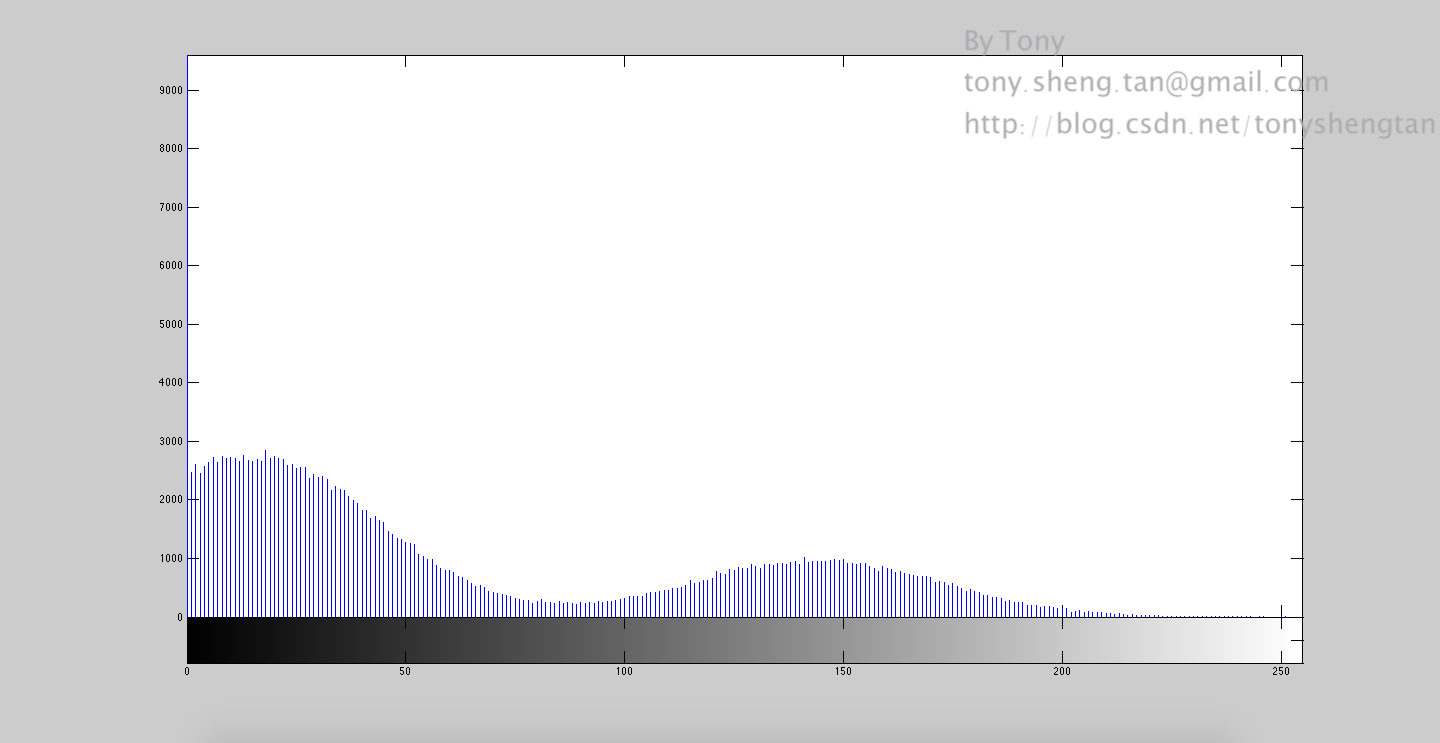
OTSU算法可以基于直方图计算,考虑灰度级为{0,1,2…L-1}大小为$M \times N 的图像,设的图像,设的图像,设n_i $为灰度级为i的像素的总数量,那么:
$M \times N=\sum^{L-1}_{i=0}n_i $ $p(n_i)=\frac{n_i}{M \times N} $ $\sum^{L-1}_{i=0}p_i=1 $
假设阈值为k将直方图分成两部分。
部分1(C1)(C_1)(C1)的概率为:
$p_1(k)=\sum^{k}_{i=0}p_i $
部分2(C2)(C_2)(C2)的概率为:
$p_2(k)=\sum^{L-1}_{i=k+1}p_i $
部分1(C1)(C_1)(C1)的平均数:
$m_1(k)=\sum^{k}_{i=0}i*P(i|C_1)=\sum^{k}_{i=0}i*\frac{P(C_1|i)*P(i)}{P(C_1)} $
$P(C_1|i) 的值为1,因为的值为1,因为的值为1,因为i 是属于是属于是属于C_1 的,所以发生的,所以发生的,所以发生i 以后发生以后发生以后发生C_1 $的概率是100%,所以
$m_1(k)=\frac{1}{P_1(k)} \sum^{k}_{i=0}i*p_i $
部分2(C2)(C_2)(C2)的平均数:
$m_2(k)=\frac{1}{P_2(k)} \sum^{L-1}_{k+1}i*p_i $
全图的均值
$m_G=\sum^{L-1}_{i=0}iP_i $
上面的式子可以由下面验证:
$P_1m_1+P_2m_2=m_G $ $P_1+P_2=1 $
下面就是关键部分了,如何评价一个阈值的好坏,提出一个阈值,将像素灰度分为两类,通过以下的公式来评价阈值质量:
$\eta=\frac{\delta_B^2}{\delta_G^2} $ $\delta_G^2=\sum^{L-1}_{i=0}(i-m_G)^2*p_i $
δB2\delta_B^2δB2是类间方差,其定义为:
$\delta_B^2=P_1(m_1-m_G)^2+P_2(m_2-m_G)^2 $
公式还可以写成:
$\delta^2_B=P_1P_2(m_1-m_2)^2=\frac{P_1(m_1-m_G)^2}{1-P_1} $
于是最佳阈值$k^* $由下面得出:
$\delta^2_B(k^*)=max_{0\leq k \leq L-1}\delta^2_B(k) $
通过上式可以通过迭代计算出最佳的k值。使用k作为阈值,对图像进行处理。
#代码实现
/**OTSU 算法*otsu 算法使用贝叶斯分类原理得到最好聚类***/
//归一化直方图void setHist2One(double *hist_d,double *dst_hist_d){double sum=0.0;for(int i=0;i<GRAY_LEVEL;i++)sum+=hist_d[i];if(sum!=0)for(int i=0;i<GRAY_LEVEL;i++)dst_hist_d[i]=hist_d[i]/sum;}
//计算公式中最大的deta,并返回直方图灰度
double findMaxDeta(double *hist_d){double max_deta=-1.0;double max_deta_location=0.0;double m_g=0.0;for(int i=0;i<GRAY_LEVEL;i++)m_g+=i*hist_d[i];for(int i=0;i<GRAY_LEVEL;i++){double p1=0.0;double m1=0.0;double deta=0.0;for(int j=0;j<=i;j++){p1+=hist_d[j];m1+=j*hist_d[j];}deta=p1*(m1-m_g)*(m1-m_g)/(1-p1);if(deta>max_deta){max_deta_location=i;max_deta=deta;}}return max_deta_location;
}
void OTSUThreshold(double *src,double *dst,int width,int height,int type){int hist[GRAY_LEVEL];double hist_d[GRAY_LEVEL];setHistogram(src, hist, width, height);Hist_int2double(hist, hist_d);setHist2One(hist_d, hist_d);double threshold=findMaxDeta(hist_d);Threshold(src, dst, width, height, threshold, type);
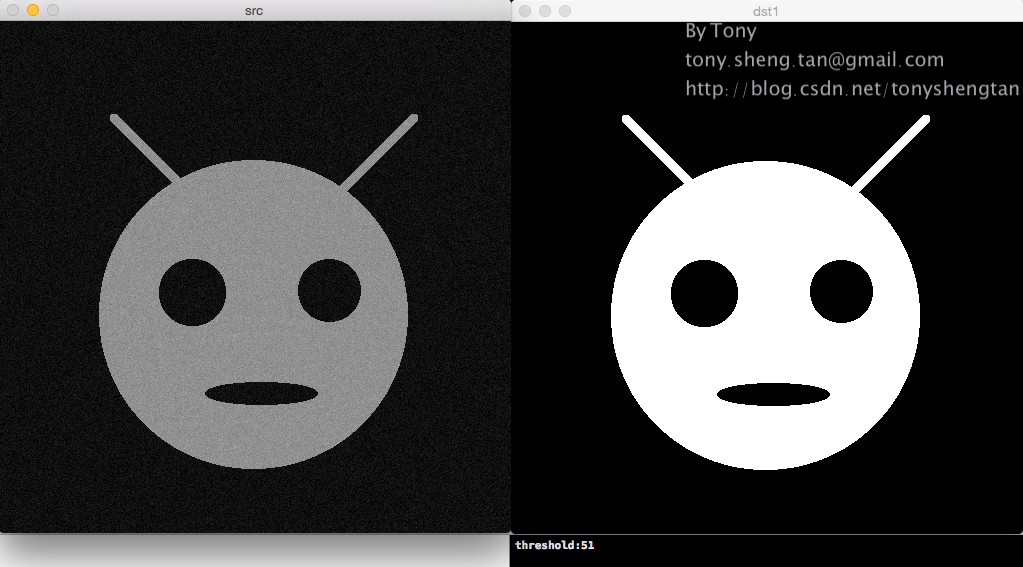
}#观察结果
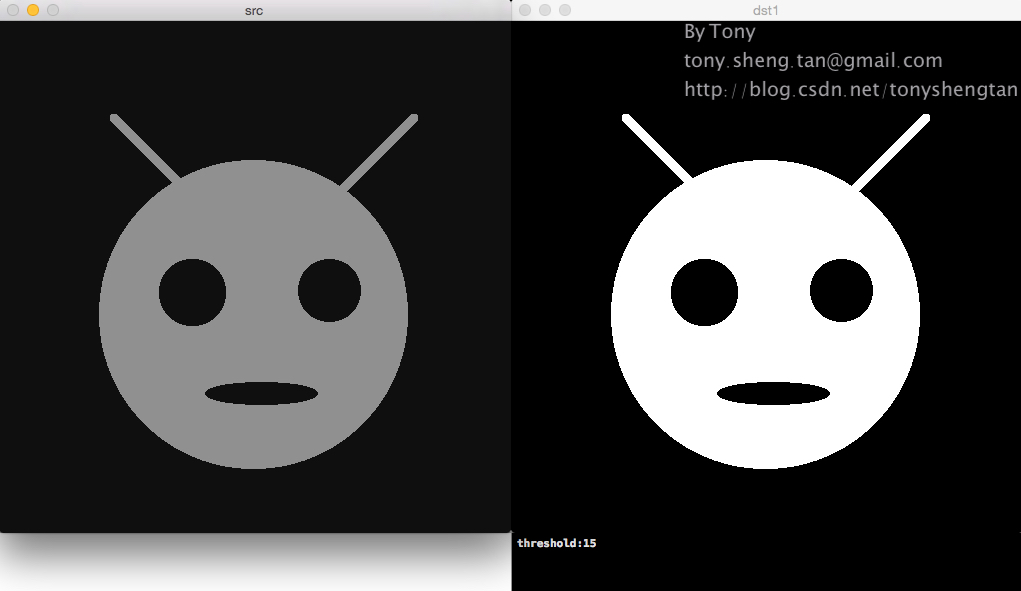
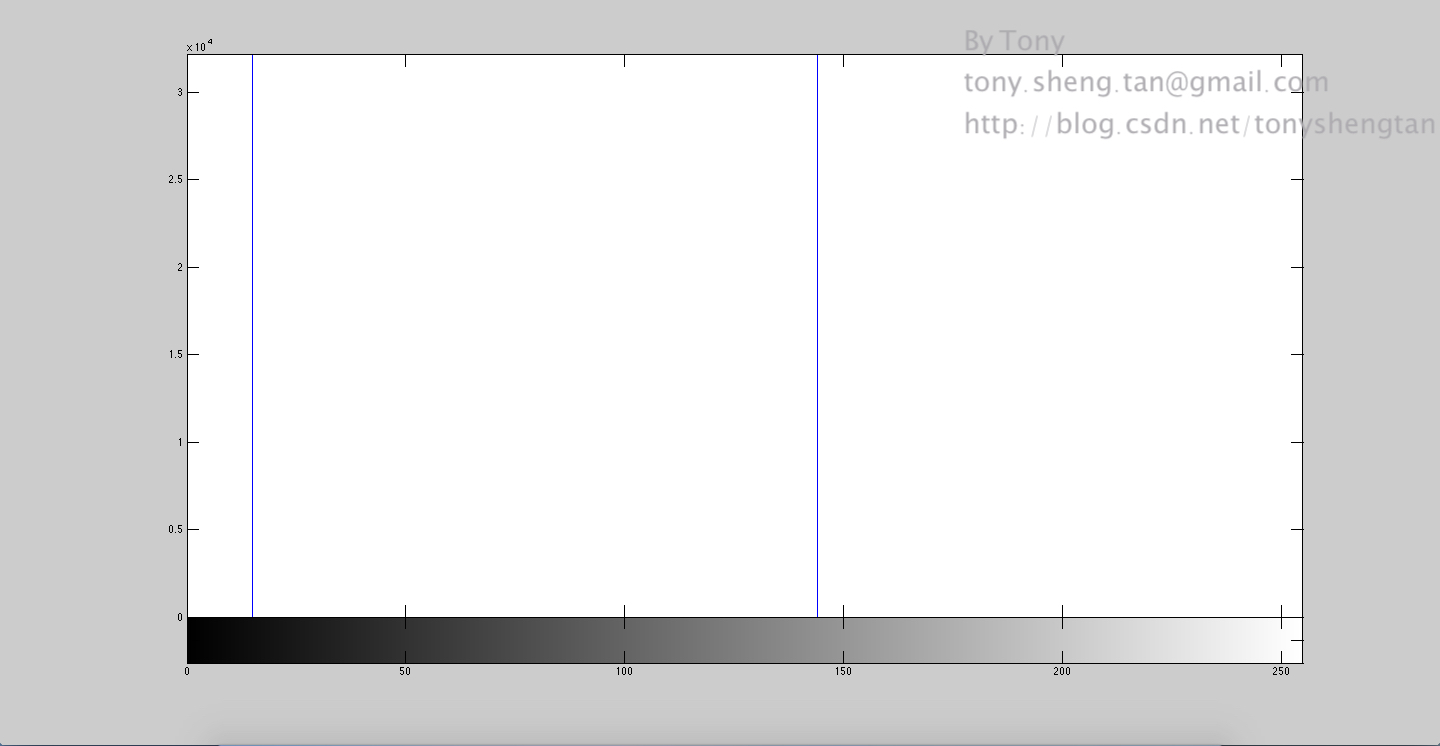
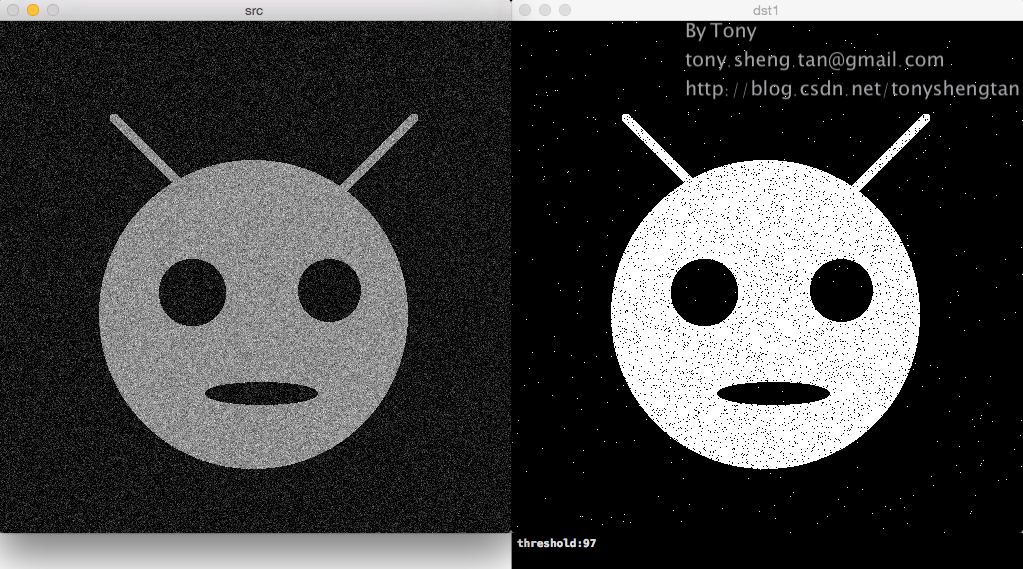
原图:
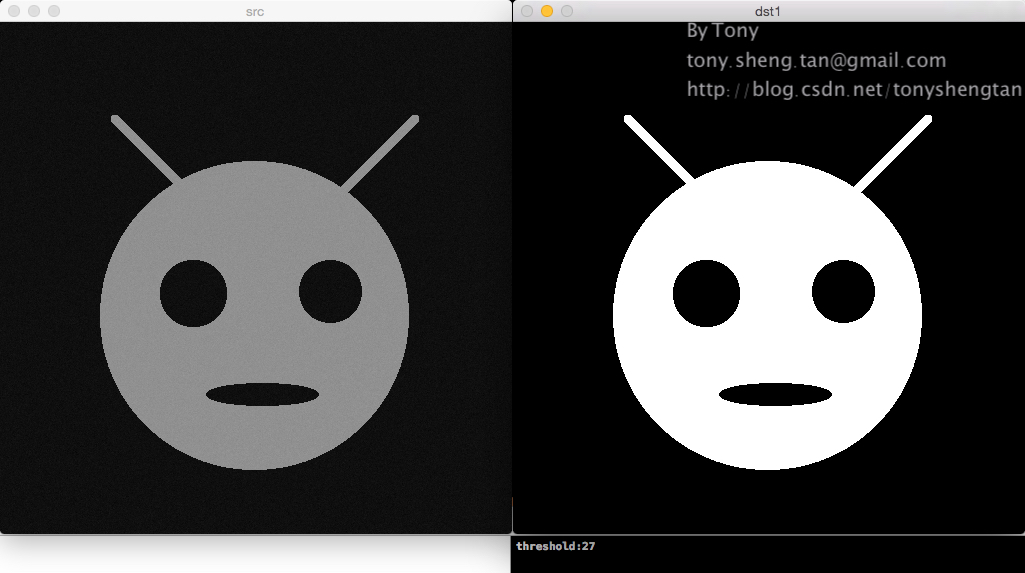
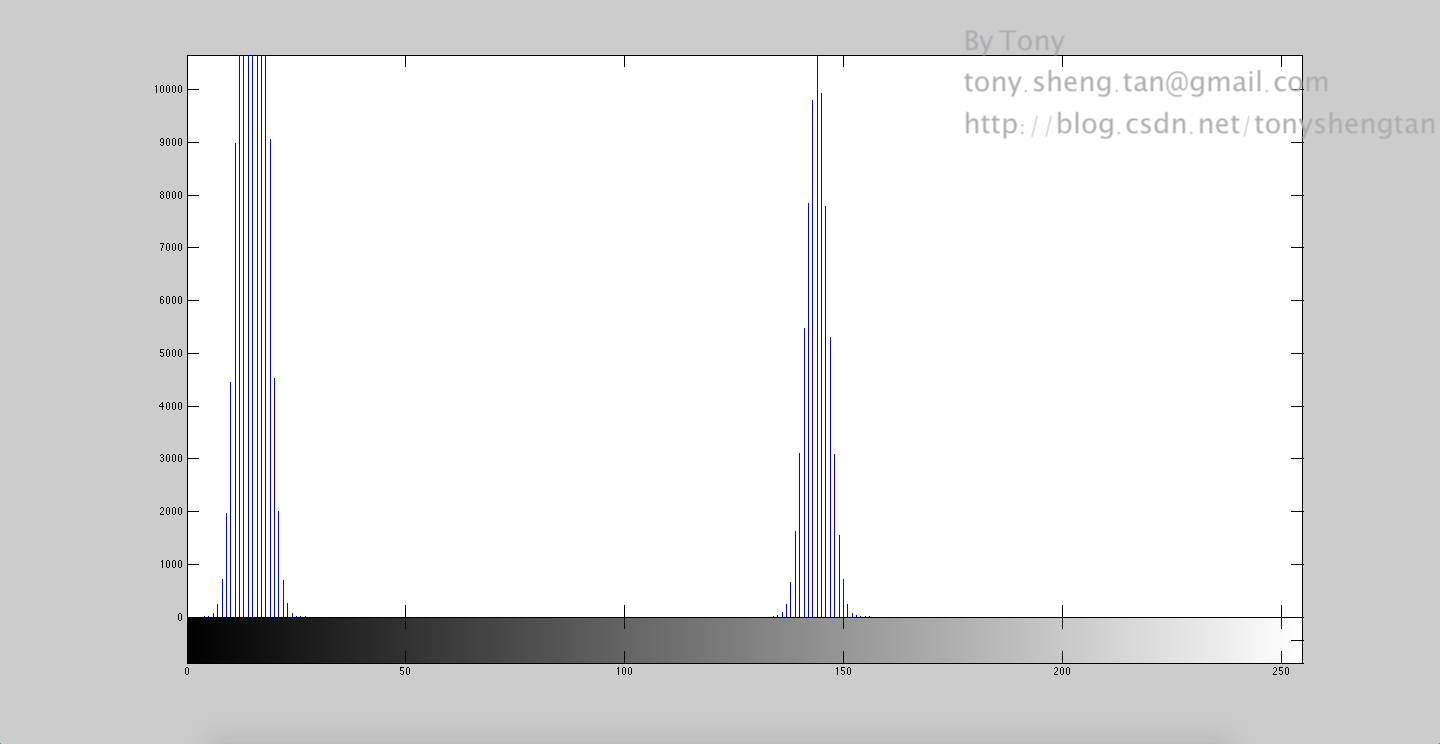
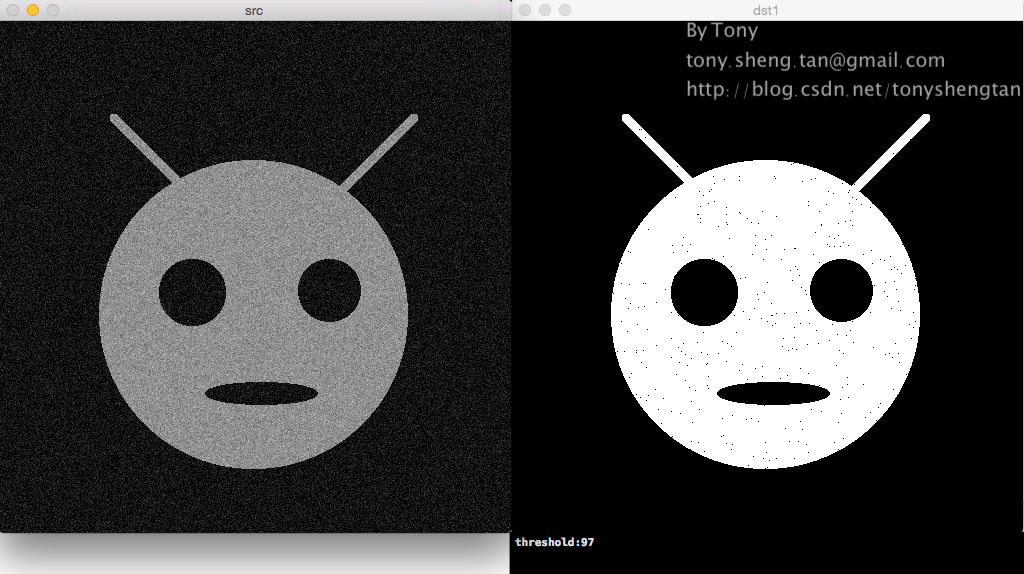
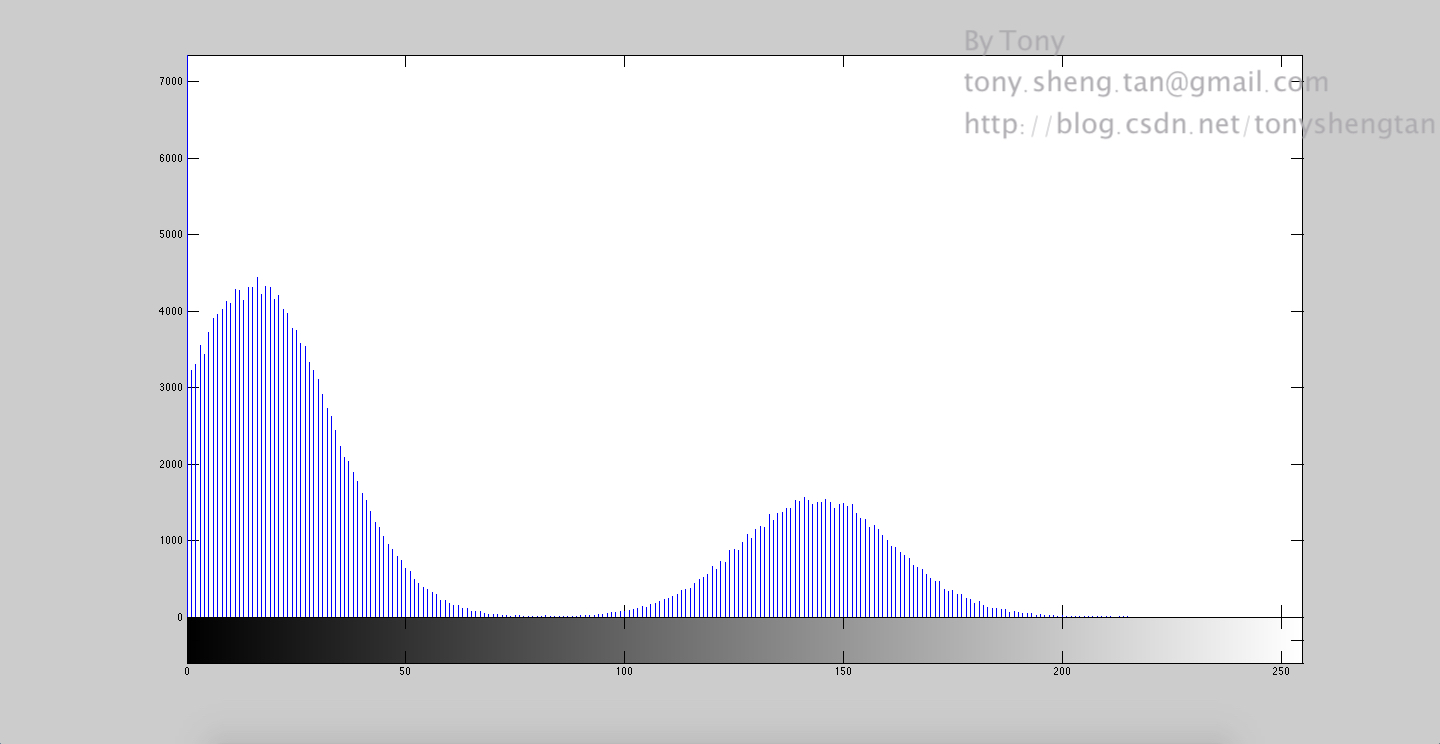
加入1%的高斯噪声:
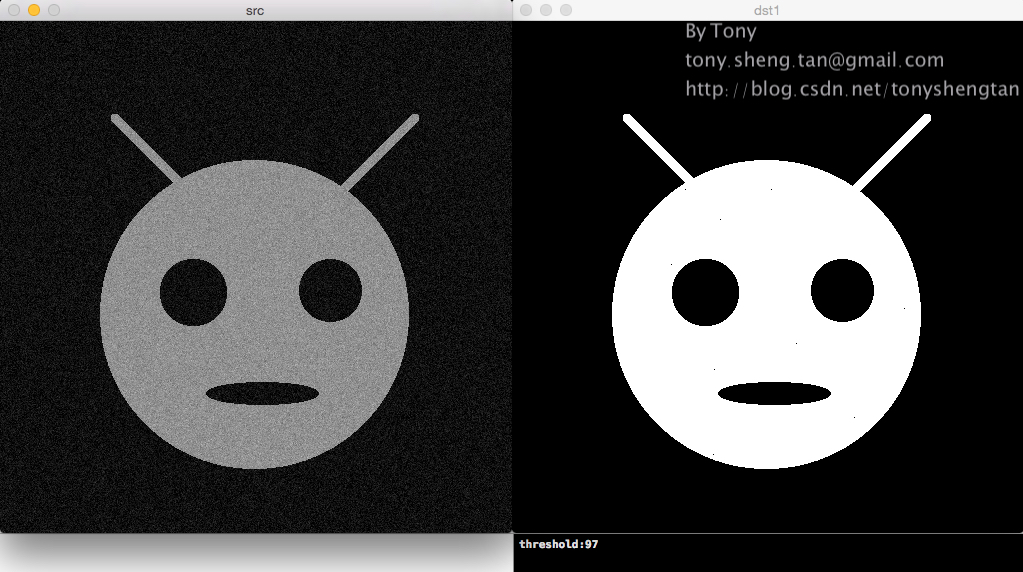
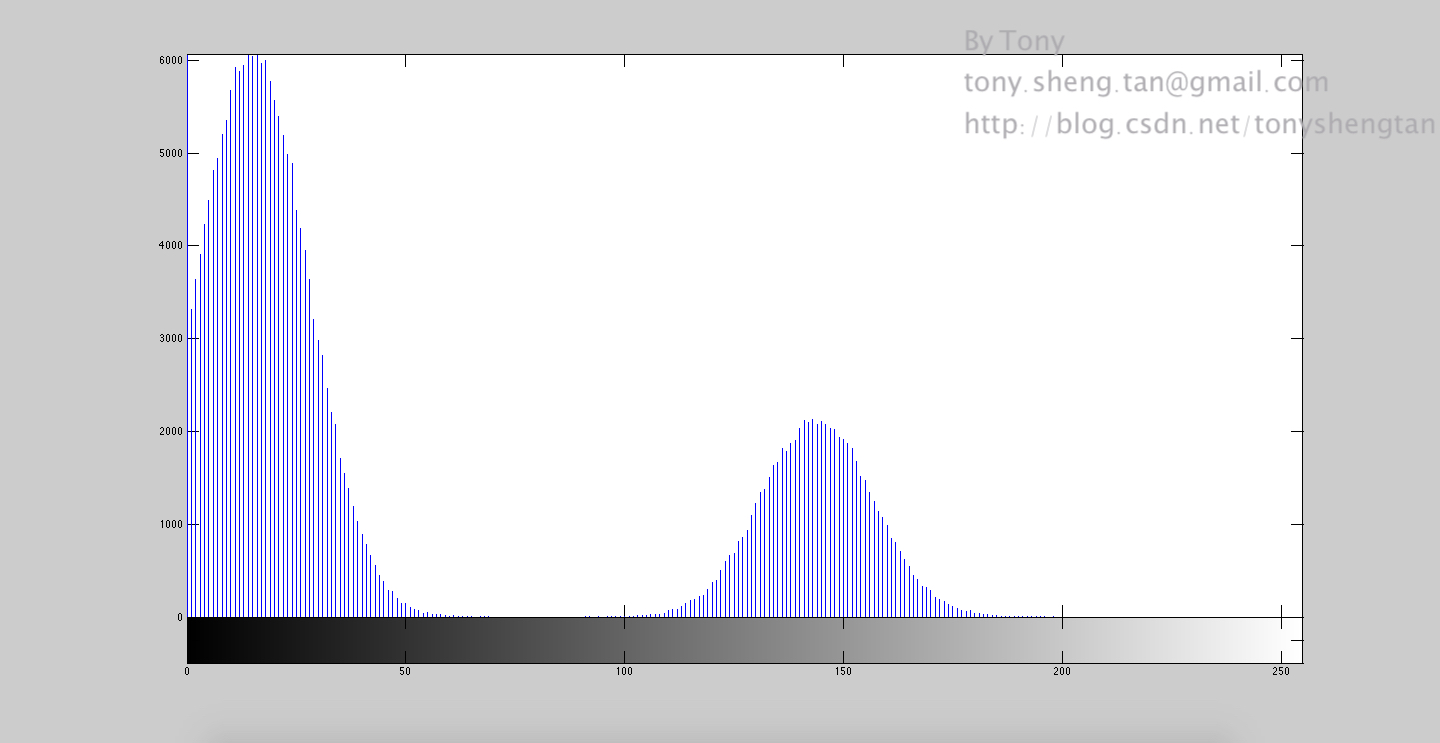
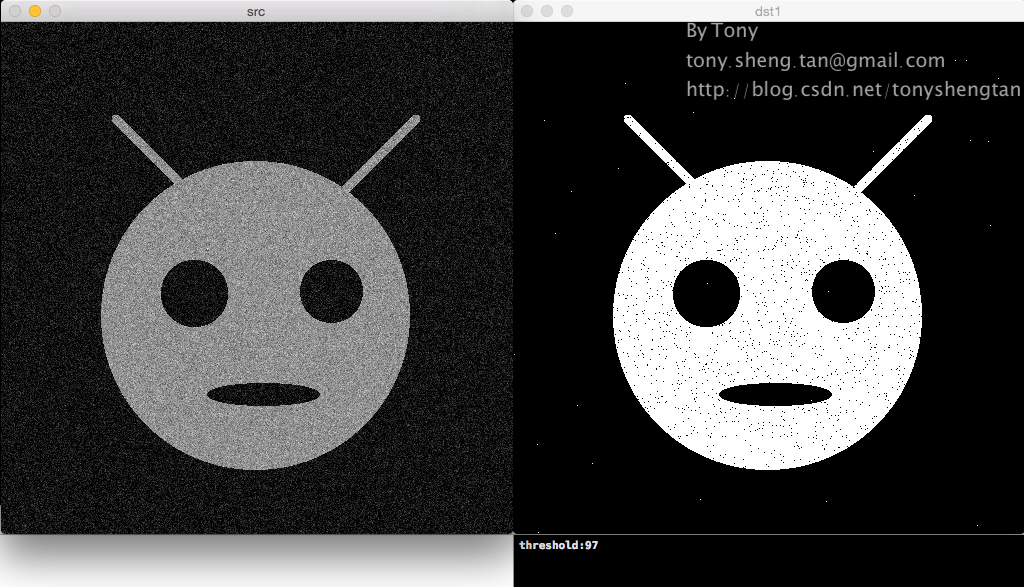
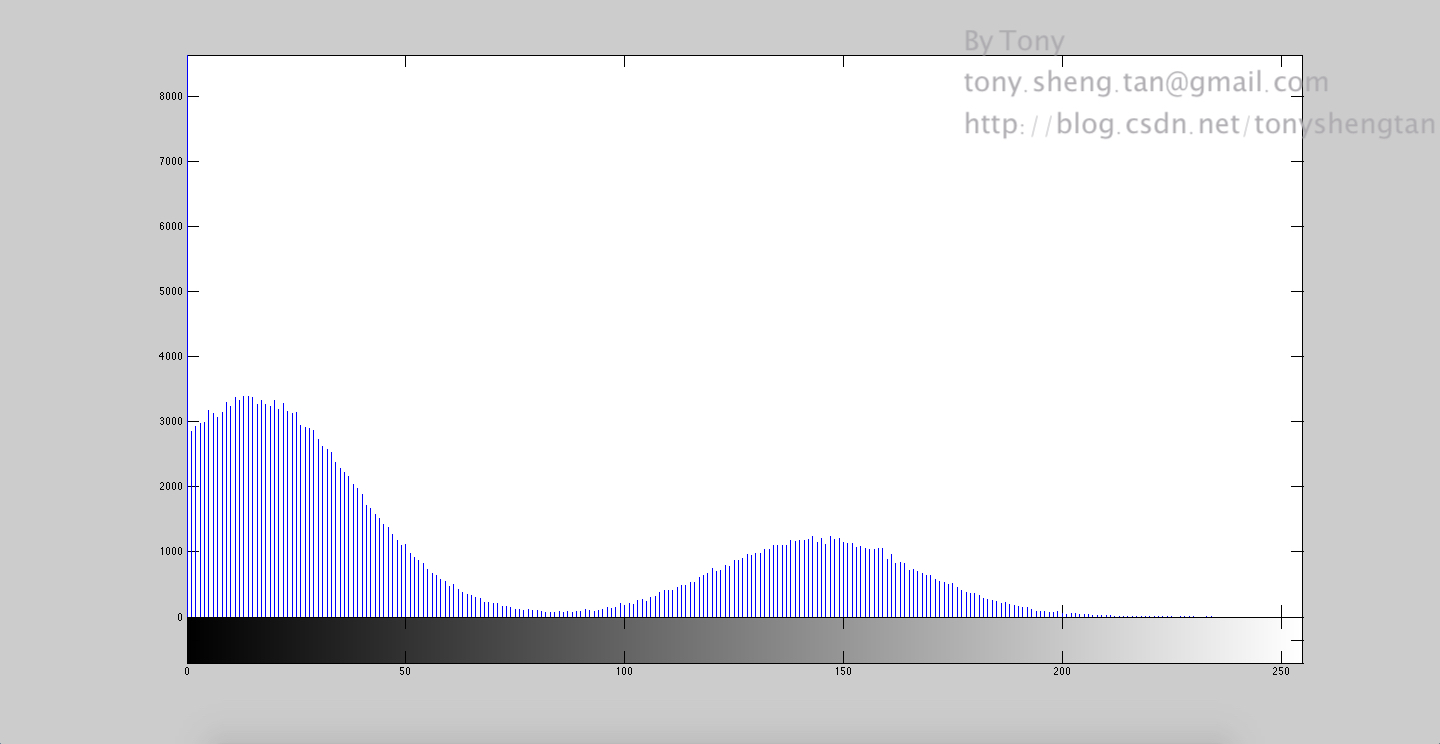
加入3%的高斯噪声:
加入5%的高斯噪声:
加入7%的高斯噪声:
加入9%的高斯噪声:
加入11%的高斯噪声:
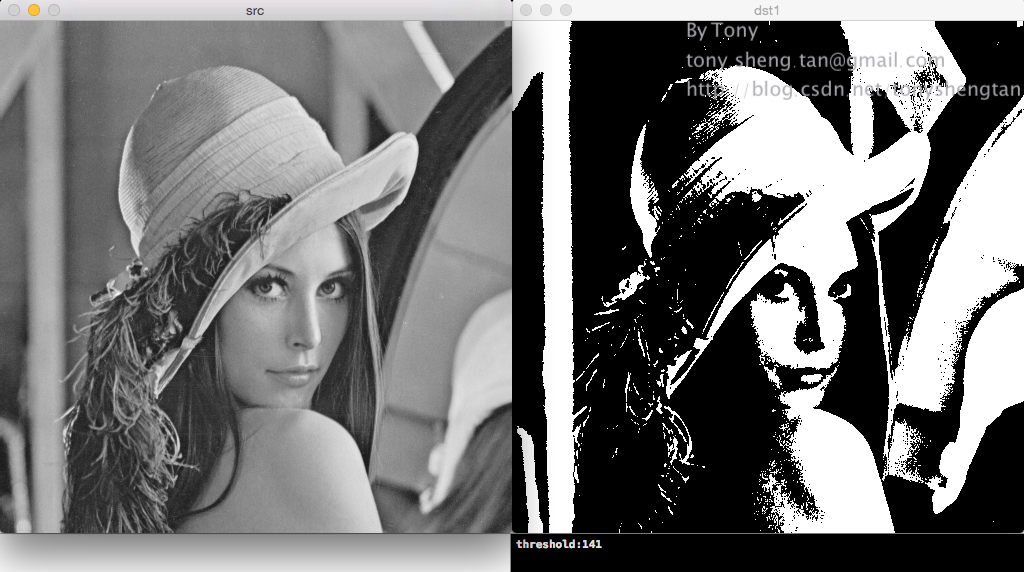
lena:
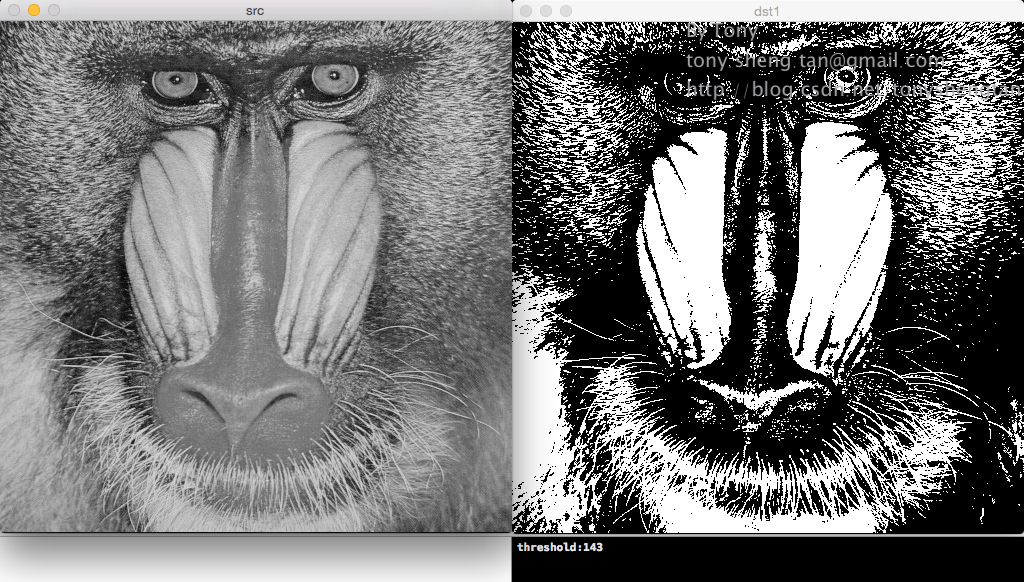
baboon:
#总结
OTSU算法产生的阈值是数学角度上的最佳分类,数学基础的贝叶斯公式,但应用也有一定的局限性,比如,前面说过最多的,对全局阈值,目标与背景的大小关系,当目标和背景大小相差很多时,或者噪声很大的时候,对OTSU产生影响较大。
待续。。。
更多人工智能机器学习,计算机视觉知识欢迎访问:
理论:
- 数学基础
- 集合论
- 1 样本集
- 2 集合操作
- 分析
- 微积分
- 数学分析
- 《陶哲轩实分析》(包含习题解答)
- 1.0 数学分析介绍
- 2.0 自然数概述
- 2.1 Peano公理
- 2.2 加法
- 2.3 乘法
- 3.0 集合论
- 3.1 集合基础(Part I)
- 3.1 集合基础(Part II)
- 3.2 罗素悖论(选读)
- 3.3 函数(I)
- 3.3 函数(II)
- 《陶哲轩实分析》(包含习题解答)
- 实分析
- 复分析
- 泛函分析
- 测度论
- 线性代数
- 《Introduction to Linear Algebra》
- 线性代数BigPicture
- 1.0 向量
- 1.1 线性组合
- 1.2 点乘和长度
- 2.1 Ax=b
- 2.2 消元
- 2.3 消元和矩阵
- 2.4 矩阵计算
- 2.5 逆
- 2.6 LU和LDU分解
- 2.7 映射与排列
- 3.1 向量空间
- 3.2 Null 空间
- 3.3 秩
- 3.4 Ax=B
- 3.5 线性独立,基和维度
- 3.6 四个空间的维度
- 4.1 四个子空间的正交
- 4.2 投影
- 4.3 最小二乘(略)
- 4.4 正交基和Gram-Schmidt算法
- 5.1 行列式的性质
- 5.2 排列和代数余子式
- 5.3 Cramer’s 法则,逆和体积
- 6.1 特征值介绍
- 6.2 矩阵对角化
- 6.3 微分方程应用(略)
- 6.4 对称矩阵
- 6.5 正定矩阵
- 6.6 相似矩阵
- 6.7 奇异值分解
- 7.1 线性变换思想
- 7.2 线性变换的矩阵
- 7.3 对角化和伪逆
- 《Introduction to Linear Algebra》
- 微分方程
- 拓扑学
- 概率论
- 概率论BigPicture
- 1.0 概率介绍、试验、事件、公理化的概率
- 1.1 样本空间、柯氏公理、概率的性质
- 1.2 古典概率、乘法原理、排列
- 1.3 组合、二项式定理、多项式定理
- 1.4 有限事件并的概率、概率欺骗了你
- 2.1 条件概率、全概率公式
- 2.2 事件独立、条件独立
- 2.3 Bayes’ Theorem
- 3.1 随机变量和离散分布
- 3.2 连续分布
- 3.3 Cumulative Distribution Function
- 3.4 双变量分布
- 3.5 边缘分布不和独立随机变量
- 3.6 条件分布 (Part I)
- 3.6 条件分布 (Part II)
- 3.7 多变量分布(Part I)
- 3.7 多变量分布(Part II)
- 3.8 随机变量的函数
- 3.9 多随机变量的函数
- 4.1 随机变量的期望 (Part I)
- 4.1 随机变量的期望 (Part II)
- 4.2 期望的性质
- 4.3 方差
- 4.4 距
- 4.5 均值和中值
- 4.6 协方差和相关性
- 4.7 条件期望
- 5.1 分布介绍
- 5.2 伯努利和二项分布
- 5.3 超几何分布
- 5.4 泊松分布
- 5.5 负二项分布
- 5.6 正态分布(Part I)
- 5.6 正态分布(Part II)
- 5.6 正态分布(Part III)
- 5.7 Gamma分布(Part I)
- 5.7 Gamma分布(Part II)
- 5.8 Beta分布
- 5.9 多项式分布
- 5.10 二维正态分布
- 6.1 大样本介绍
- 6.2 大数定理
- 6.3 中心极限定理
- 6.4 连续性修正
- 数理统计
- 《数理统计学简史》
- 介绍
- 早期概率论——从萌芽到《推测术》
- 1.1 卡丹诺的著作
- 1.2 分赌本问题
- 1.3 帕斯卡和费马的通信
- 1.4 惠更斯的“机遇与规律”
- 1.5 《推测术》前三部分内容提要
- 1.6 关于概率的几点看法
- 1.7 伯努利大数定律
- 2.0 狄莫弗的二项概率逼近
- 2.1 狄莫弗研究的动因
- 2.2 狄莫弗的初步结果
- 2.3 初步结果的改进,与斯特林的联系
- 《数理统计学简史》
- 随机过程
- 信息论
- 凸优化
- 集合论
- 算法设计过程
- 算法
机器学习算法
统计学习算法
深度学习算法
- FaceNet论文阅读
- 可视化CNN
- LeNet
- Dropout
- CNN训练数据选择
图像处理
- 1.1 灰度级
- 1.2 灰度变换,gama变换,对数,反对数变换
- 2.1 一维DFT
- 2.2 二维DFT
- 2.3 FFT算法理解与c语言的实现
- 2.4 二维FFT,IFFT,c语言实现
- 2.5 图像傅里叶变换(快速傅里叶变换FFT)
- 3.0 二值图像
- 3.1 二值图像-形态学处理 数学形态学
- 3.2 二值图像-形态学处理 腐蚀和膨胀
- 3.3 二值图像-形态学处理 开操作和闭操作
- 3.4 二值图像-形态学处理4 其他操作
- 4.0 灰度图像
- 4.1 灰度图像-形态学处理
- 4.2 灰度图像-频域滤波 傅里叶变换之卷积
- 4.3 灰度图像-频域滤波 傅里叶变换之连续周期信号傅里叶级数
- 4.4 灰度图像-频域滤波 傅里叶变换之离散周期信号傅里叶级数
- 4.5 灰度图像-频域滤波 傅里叶变换之连续信号傅里叶变换(FT)
- 4.6 灰度图像-频域滤波 傅里叶变换之采样定理
- 4.7 灰度图像-频域滤波 傅里叶变换之离散时间傅里叶变换(DTFT)
- 4.8 灰度图像-频域滤波 傅里叶变换之离散傅里叶变换(DFT)
- 4.9 灰度图像-频域滤波 傅里叶变换之二维离散傅里叶变换
- 4.10 灰度图像-频域滤波 概论
- 4.11 灰度图像-频域滤波 滤波器
- 4.12 灰度图像-频域滤波 同态滤波
- 5.0 灰度图像-空域滤波 基础:卷积和相关
- 5.1 灰度图像-图像增强 综合介绍
- 5.2 灰度图像-图像增强 平滑之均值滤波、高斯滤波
- 5.3 灰度图像-图像增强 双边滤波 Bilateral Filtering
- 5.4 灰度图像-图像增强 中值滤波
- 5.5 灰度图像-图像增强 锐化基础
- 5.6 灰度图像–图像增强 拉普拉斯算子
- 5.7 灰度图像-图像增强 非锐化掩蔽 (Unsharpening Mask)
- 5.8 灰度图像-图像增强 Robert算子、Sobel算子
- 5.9 灰度图像–图像增强 灰度变换
- 5.10 灰度图像–图像增强 直方图均衡化(Histogram Equalization)
- 5.11 灰度图像-图像增强 直方图匹配(规定化)Histogram Specification
- 6.0 灰度图像-图像分割 综合介绍
- 6.1 灰度图像-图像分割 边缘模型
- 6.2 灰度图像-图像分割 边缘检测算子 综述
- 6.3 灰度图像-图像分割 Robert算子
- 6.4 灰度图像-图像分割 Sobel算子
- 6.5 灰度图像-图像分割 Prewitt算子
- 6.6 灰度图像-图像分割 Scharr算子
- 6.7 灰度图像-图像分割 Sobel算子,Prewitt算子和Scharr算子平滑能力比较
- 6.8 灰度图像-图像分割 Canny边缘检测
- 6.9 灰度图像-图像分割 Marr-Hildreth算子(LoG算子)
- 6.10 灰度图像-图像分割 霍夫变换(Hough Transform)–直线
- 7.0 灰度图像-图像分割 阈值处理综述
- 7.1 灰度图像-图像分割 阈值处理之平均阈值
- 7.2 灰度图像-图像分割 阈值处理之P-Tile阈值
- 7.3 灰度图像–图像分割 阈值处理之迭代均值阈值
- 7.4 灰度图像-图像分割 阈值处理之谷底阈值、峰顶平均
- 7.5 灰度图像-图像分割 阈值处理之OTSU阈值
- 7.6 灰度图像–图像分割 阈值处理之补充说明
- 7.7 灰度图像-图像分割 阈值处理之局部阈值
- 7.8 灰度图像-图像分割 区域分割之区域生长
- 7.9 灰度图像-图像分割 区域分割之区域分离
- 7.10 灰度图像-图像分割 区域分割之分水岭算法
- 8.0 彩色模型,CIE XYZ,CIE RGB
- 8.1 彩色图像-色彩空间 综述
- 8.2 彩色图像-色彩空间 RGB系列
- 8.3 彩色图像-色彩空间 CMY(K)空间
- 8.4 彩色图像-色彩空间 YIQ 、YUV 、YCbCr 、YC1C2 和I1I2I3
- 8.5 彩色图像-色彩空间 CIELAB、CIELUV
- 8.6 彩色图像-色彩空间 HSI(HSL)、HSV(HSB)
- 8.7 彩色图像-色彩空间 总结
- 9.1 彩色图像-伪彩处理 灰度图转伪彩色图像
- 9.2 彩色图像-彩色变换 补色处理
- 10.1 彩色图像-图像增强 直方图增强
- 10.2 彩色图像-图像增强 图像平滑
- 10.3 彩色图像-图像增强 图像锐化
- 10.4 彩色图像-图像分割 彩色空间分割
遗传算法
- 神经生物学
技术
- 语言
- C++
- Python
- Web Crawler
- 1.0 Introduction
- 2.0 分析目标网站
- 3.0 三只虫
- 3.1 HTTP协议(一)
- 3.2 HTTP协议(二)
- 3.3 数据抓取
- Web Crawler
- CUDA
- 0.0 腾讯云CUDA环境搭建
- 1.0 并行计算与计算机架构
- 1.1 异构计算与CUDA
- 2.0 CUDA编程模型概述(一)
- 2.1 CUDA编程模型概述(二)
- 2.2 给核函数计时
- 2.3 组织并行线程
- 2.4 设备信息查询
- 3.1 CUDA执行模型概述
- 3.2 理解线程束执行的本质(Part I)
- 3.2 理解线程束执行的本质(Part II)
- 3.3 并行性表现
- 3.4 避免分支分化
- 3.5 循环展开
- 3.6 动态并行
- 4.0 全局内存
- 4.1 内存模型概述
- 4.2 内存管理
- 4.3 内存访问模式
- 4.4 核函数可达到的带宽
- 4.5 使用统一内存的向量加法
- 框架
- OpenCV
- OpenCV矩阵计算分析
- TensorFlow .etc
- OpenCV
- 设计实现框架
- PineNut
随笔
- 其他
- 推荐读物
- 学习
- Hexo博客搭建
- Hexo畅言评论PC和移动端同步
灰度图像--图像分割 阈值处理之OTSU阈值相关推荐
- 迭代阈值法,otsu阈值法,特征空间类聚法对图像进行分割(python)
用到:迭代阈值法,Otsu阈值,特征空间聚类法 实验用图: 1.用迭代阈值法确定阈值,对图像进行分割,显示阈值和分割结果: import cv2 import numpy as np import m ...
- 【MATLAB教程案例23】基于MATLAB图像分割算法仿真——阈值分割法、Otsu阈值分割法、K均值聚类分割法等
FPGA教程目录 MATLAB教程目录 目录 1.软件版本 2.通过二值图实现图像分割 3.通过Otsu阈值分割实现图像分割
- 灰度图像--图像分割 阈值处理之谷底阈值、峰顶平均
学习DIP第54天 转载请标明本文出处:***http://blog.csdn.net/tonyshengtan ***,出于尊重文章作者的劳动,转载请标明出处!文章代码已托管,欢迎共同开发:http ...
- c语言实现灰度图像阈值分割,灰度图像--图像分割 阈值处理之平均阈值
学习DIP第52天 转载请标明本文出处:http://blog.csdn.net/tonyshengtan ,出于尊重文章作者的劳动,转载请标明出处!文章代码已托管,欢迎共同开发:https://gi ...
- 基于MATLAB改进Otsu阈值分割的车道线检测
基于MATLAB改进Otsu阈值分割的车道线检测 摘要:在判断车道偏离以防止车辆碰撞等危害时,车道标线检测需要通过图像处理来进行,检测方法是否适用于各种背景环境条件以及检测的及时性至关重要传统的Ots ...
- 【图像处理】——图像的二值化操作及阈值化操作(固定阈值法(全局阈值法——大津法OTSU和三角法TRIANGLE)和自适应阈值法(局部阈值法——均值和高斯法))
目录 一.二值化的概念(实际上就是一个阈值化操作) 1.概念: 2.实现方法 3.常用方法 二.阈值类型 1.常见阈值类型(主要有五种类型) (1)公式描述 (2)图表描述 2.两种特殊的阈值算法(O ...
- OpenCV与图像处理学习七——传统图像分割之阈值法(固定阈值、自适应阈值、大津阈值)
OpenCV与图像处理学习七--传统图像分割之阈值法(固定阈值.自适应阈值.大津阈值) 一.固定阈值图像分割 1.1 直方图双峰法 1.2 OpenCV中的固定阈值分割 二.自动阈值图像分割 2.1 ...
- 数字图像处理11:阈值分割(基本全局阈值处理,Otsu 的最佳全局阈值,图像平滑改善全局阈值处理,图像分块的可变阈值)
阈值分割 从背景中提取物体的一种明显方法是,选择一个将这些模式分开的阈值 T.然后, f ( x , y ) > T f(x,y)>T f(x,y)>T的任何点 (x, y) 称为个 ...
- matlab图像处理--Otsu阈值分割
原文:https://blog.csdn.net/weixin_41721222/article/details/80207909 Otsu算法:取一个最优阈值把原图像分为前景色(A部分)与背景色(B ...
最新文章
- 用lisp编写串口助手源代码_实战用python来写个串口助手--界面篇
- DOM树和Render树的创建
- 牛客 - 牛牛的mex(主席树/思维)
- bzoj3144: [Hnoi2013]切糕(最小割)
- ffplay的快捷键以及选项
- PyTorch系列 (二): pytorch数据读取自制数据集并
- jsp,jstl checkbox 回显方法
- ODrive踩坑(四)AS5047P-SPI绝对值磁编码器,不需每次上电校准无刷电机,直接上电可用
- UIView - CAGradientLayer
- 【转载】SQL Server XML Path
- 如何关闭极域课堂(亲测有效)(含下载链接)
- Java二叉树的层序遍历leetcode
- 高级终端termux下载不了Python_利用termux下载某站受限的番剧
- 云计算发展趋势分析(一)之OpenStack vs. K8S
- 异常 illegal character 200B
- MT7921:WIFI、AP、BT基础知识
- 配置oem 13c以监控管理数据库
- QQ用户这两个文件夹要定时清理
- Java中的String为什么是不可变的?
- 男人:从未了解的十五件事