焊接机器人控制系统原理分析
焊接机器人控制系统原理及应用分析
焊接是工业生产中非常重要的加工方式,同时由于焊接烟尘、弧光和金属飞溅的存在,焊接的工作环境非常恶劣,随着人工成本的逐步提升,以及人们对焊接质量的精益求精,焊接机器人得到了越来越广泛的应用。
机器人在焊装生产线中运用的特点
焊接机器人在高质、高效的焊接生产中发挥了极其重要的作用,其主要特点如下:
1.性能稳定、焊接质量稳定,保证其均一性
焊接参数如焊接电流、电压、焊接速度及焊接干伸长度等对焊接结果起决定性作用。人工焊接时,焊接速度、干伸长等都是变化的,很难做到质量的均一性;采用机器人焊接,每条焊缝的焊接参数都是恒定的,焊缝质量受人为因素影响较小,降低了对工人操作技术的要求,焊接质量非常稳定。
2.改善了工人的劳动条件
采用机器人焊接后,工人只需要装卸工件,远离了焊接弧光、烟雾和飞溅等;点焊时,工人不再需要搬运笨重的手工焊钳,从大强度的体力劳动中解脱出来。
3.提高劳动生产率
机器人可一天24h连续生产,随着高速、高效焊接技术的应用,使用机器人焊接,效率提高地更加明显。
4.产品周期明确,容易控制产品产量
机器人的生产节拍是固定的,因此安排生产计划非常明确。
5.可缩短产品改型换代的周期,降低相应的设备投资
可实现小批量产品的焊接自动化。机器人与专机的最大区别就是它可以通过修改程序以适应不同工件的生产。
一、FANUC控制系统概述
FANUC机器人主要应用在奇瑞公司乘用车一厂和乘用车三厂的焊装车间,是奇瑞最早引进的焊接机器人,也是奇瑞公司最先用到具有附加轴的焊接机器人。
其控制系统采用32位CPU控制,以提高机器人运动插补运算和坐标变换的运算速度。采用64位数字伺服驱动单元,同步控制6轴运动,运动精度大大提高,最多可控制到21轴,进一步改善了机器人动态特性。支持离线编程技术,技术人员可通过离线编程软件设置参数,优化机器人运动程序。控制器内部结构相对集成化,这种集成方式具有结构简单、整机价格便宜、易维护保养等特点。

图1 控制原理图
二、FANUC控制系统内部结构分析
控制器是机器人的核心部分,实现对机器人的动作操作、信号通讯、状态监控等功能。下面以FANUC—F-200iB为例,对其控制系统内部结构和各部分的功能进行分析:
1)电源供给单元
变压器向电源分配单元输入230V交流电,通过该单元的系统电源分配功能对控制箱内部各工作板卡输出210V交流电及±15V、+24V直流电。
2)安全保护回路
由变压器直接向急停单元供电,并接入内部各控制板卡形成保护回路,对整个系统进行电路保护。
3)伺服放大器
不仅提供伺服电机驱动和抱闸电源,并且与绝对值编码器实现实时数据转换,与主控机间采用光纤传输数据,进行实时信号循环反馈。
4)输入/输出模块
标配为ModuleA/B,另外也可通过在扩展槽安装Profibus板、过程控制板与PLC及外围设备进行通讯。
5)主控单元
整个控制系统的中枢部分,包括主板、CPU、FROM/SRAM组件及伺服卡,负责控制器内部及外围设备的信号处理和交换。
6)急停电路板
用来对紧急停止系统、伺服放大器的电磁接触器以及预备充电进行控制。
7)示教器
包括机器人编程在内的所有操作都能由该设备完成,控制器状态和数据都显示在示教盒的显示器上。
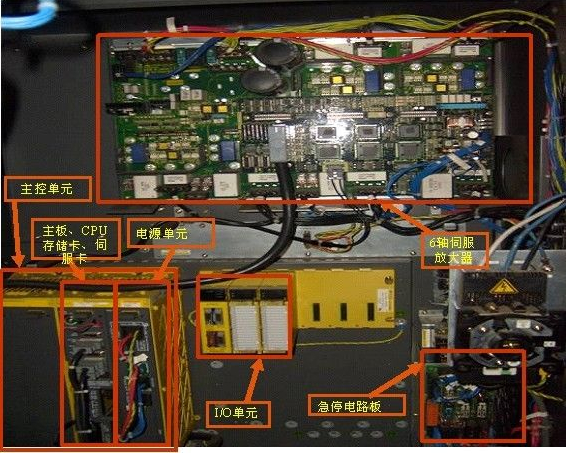
图2 控制内部结构
三、 故障案例分析
机器人控制器断电检修后,对控制器送电,机器人报伺服故障,故障代码为SERVO-062。对此故障进行复位:按MENUS→SYSTEM→F1,[TYPE]→找 master/cal→F3,RES_PCA →F4,YES 后,机器人仍然报伺服故障。
1、故障分析和检查:故障代码SERVO-062的解释为SERVO2 BZAL alarm(Group:%d Axis:%d),故障可能原因分析如下:
1) 机器人编码器上数据存储的电池无电或者已经损坏:拆卸编码器脉冲数据存储的电池安装盒,电池盒内装有4节普通1.5V的1号干电池,对每节电池的电压进行测量,均在1.4V以下,电池电压明显偏低,于是更换新电池,再次对故障进行复位,机器人仍然报SERVO-062故障。
2) 控制器内伺服放大器控制板坏:检查伺服放大器LED“D7”上方的2个DC链路电压检测螺丝,确认DC链路电压。如果检测到的DC链路电压高于50V,就可判断伺服放大器控制板处于异常状态。实际检测发现DC链路电压低于50V,所以初步判断伺服放大器控制板处于正常状态。 进一步对伺服放大器控制板上P5V、P3.3V、SVEMG、OPEN的LED颜色进行观察,确认电源电压输出正常,没有外部紧急停止信号输入,与机器人主板通讯也正常,排除伺服放大器控制板损坏。
3) 线路损坏:对机器人控制器与机器人本体的外部电缆连线RM1、RP1进行检查,RM1为机器人伺服电机电源、抱闸控制线,RP1为机器人伺服电机编码器信号以及控制电源线路、末端执行器线路、编码器上数据存储的电池线路等线路。拔掉插头RP1,对端子5、6、18 用万用表测量+5V、+24V控制电源均正常。接下来对编码器上数据存储的电池线路进行检查。机器人每个轴的伺服电机脉冲编码器控制端由1-10个端子组成,端子8、9、10为+5V电源,端子4、7为数据保持电池电源,端子5、6为反馈信号,端子3为接地,端子1、2空。拔掉M1电机的脉冲控制插头 M1P,万用表测量端子4、7,电压为0,同样的方法检查M2~M7电机全部为0,由此可以判断编码器上数据存储的电池线路损坏。顺着线路,发现正负电源双绞线的一端插头长期埋在积水中,线路已腐蚀严重。
2、故障处理:更换线路后复位,对机器人进行全轴零点复归“ZERO POSITION MASTER”,导入备份程序后恢复正常,故障排除。
结论
做为日系机器人的主要品牌之一,其在控制原理上与其它品牌机器人大致相同,但其控制部分组成结构有着自己的风格,体现亚洲人的使用习惯,比较适合国内使用。我国焊接机器人技术的研究应用虽然较晚,但借鉴于国外的成熟技术,得到了迅速的发展。09年我公司与哈工大合作开发的奇哈机器人诞生,似乎看到了企业与科研合作的力量,觉得当企业进入的时候,特别是这种应用型企业开始参与设备的研究的时候,门就慢慢打开了。但焊接机器人是个机电一体化的高技术产品,单靠企业的自身能力是不够的,需要政府对机器人生产企业及使用国产机器人系统的企业给予一定的政策和资金支持,加速我国国产机器人的发展。
焊接机器人控制系统原理分析相关推荐
- 机器人毕业设计题目推荐/康复机器人、(三、四、五、六度机器人)、焊接机器人、履带式搜救机器人、管道机器人、关节机器人、码垛机器人、焊接机器人、爬壁机器人、扫地机器人、喷涂机器人、搬运机器人……
机器人毕业设计题目共有2000多套,部分列表如下: 上肢康复机器人结构设计(全套)本科毕业设计--论文.CAD图纸.开题报告.任务书 三自由度机械手-工业机器人(说明书+CAD图纸) 三自由度焊接机器 ...
- 弧焊机器人断弧_焊接机器人技术宝典之焊接技术缺陷分析及防治措施(1)
在工业生产上,焊接机器人得到普及使用,那么设备焊接时,需要了解哪些焊接缺陷?一篇焊接机器人技术宝典之焊接技术缺陷分析及防治措施告诉你想知道的. 一.焊接缺陷的分类 焊接缺陷的种类很多,按其在焊缝中所处 ...
- STM32毕业设计——基于STM32+JAVA+Android的六足机器人控制系统设计与实现(毕业论文+程序源码)——六足机器人控制系统
基于STM32+JAVA+Android的六足机器人控制系统设计与实现(毕业论文+程序源码) 大家好,今天给大家介绍基于STM32+JAVA+Android的六足机器人控制系统设计与实现,文章末尾附有 ...
- 埃斯顿工业机器人控制柜_埃斯顿“王牌”——焊接机器人“隐形冠军”CLOOS出征...
2019年12月11-13日,以"生态互联•逆势突围"为主题的"利元亨•2019高工机器人年会"将在深圳机场凯悦酒店举行,同期还将举行2019高工机器人金球奖颁 ...
- 小型水下机器人控制系统方案设计
3 水下机器人控制系统设计 方案设计 水下机器人总体控制方案,如图3.1.水下机器人总体控制方案是设计的核心所在,控制系统主要包括水上控制器.姿态控制系统.图像控制系统三部分.姿态控制是对水下机器人进 ...
- 珠海维修安川服务器,珠海市安川焊接机器人维保中心
珠海市安川焊接机器人维保中心 " 驱动器出现奇偶错误,库卡机器人异常无法工作解决措施 简介一.故障现象及原因分析 机器人运行中,提示驱动模块**奇偶错误,原因为在读驱动模块寄存器时,连续出现 ...
- 工业机器人——焊接机器人
焊接机器人是从事焊接(包括切割与喷涂)的工业机器人.根据国际标准化组织(ISO)工业机器人属于标准焊接机器人的定义,工业机器人是一种多用途的.可重复编程的自动控制操作机(Manipulator),具有 ...
- 南岸焊接机器人厂_焊接技术的发展历史,世界焊接发展200年回顾,你了解焊接吗?...
焊接是通过加热.加压,或两者并用,使两工件产生原子间结合的加工工艺和联接方式.焊接应用广泛,既可用于金属,也可用于非金属. 焊接技术的发展历史 公元前3000多年埃及出现了锻焊技术. 公元前2000多 ...
- 六轴机器人 宝元系统_庆云大国重器上线六轴智能焊接机器人,锻造高质量发展硬核...
在大国重器坚持创新发展道路上,不断"借智"发展,提升科研保障能力,追求国际先进水平,为企业发展提供强劲动能. 六轴智能焊接机器人 六轴智能焊接机器人是大国重器自动化设备股份有限公司 ...
最新文章
- XAML数据绑定(Data Binding)
- linux shell if [[ ]]和[ ]区别 ||
- 【PP生产订单】收货Goods Receipt
- 微信小程序css3动画怎么写,微信小程序动画课程-通过wxss(css)来实现-animation 属性...
- 数据库相关的论文笔记
- RocketMQ的历史发展
- [Leetcode][第108题][JAVA][将有序数组转换为二叉搜索树][二分法][递归]
- 冬季,拿什么来温暖你的心情
- 百分点发布《数据决策力白皮书》:数据的能量才开始激发
- 如何使用计算机实现fft,快速傅立叶变换(FFT)的计算机实现..doc
- 从Java到C++——常量的使用规则
- java ME是什么意思_java me是什么?
- 编程珠玑java_编程珠玑第八章
- 如何查询手机当前基站编号信息
- pacman 升级软件包提示 “failed to commit transaction (invalid or corrupted package)“
- 微信公众号--生成带参数的二维码 {“errcode“:48001,“errmsg“:“api unauthorized rid: 60520af9-71ff2283-63d36e0d“}
- 华为mate50os鸿蒙,华为Mate50将如期发布,屏下镜头+鸿蒙OS,再见iPhone12
- iptables的三表五链
- Vue表格绑定数据、添加数据
- GAN“家族”又添新成员——EditGAN,不但能自己修图,还修得比你我都好