用于无人驾驶技术的车道线_自动驾驶汽车可用于查找车道的4种技术
用于无人驾驶技术的车道线
Teaching a computer to see, has wide varieties of applications. In the context of a self driving car, on seeing the below picture, the car has to know where the lanes are, in order to navigate safely.
牛逼 eaching电脑看,具有广泛的品种的应用。 在自动驾驶汽车的背景下,看到下面的图片,汽车必须知道车道在哪里,才能安全地行驶。

We will look at a few techniques to find lane lines.
我们将看一些找到车道线的技术。
技术技巧 (Techniques)
- Color Thresholding颜色阈值
- Region Masking区域遮罩
- Canny Edge Detection坎尼边缘检测
- Hough Transformation霍夫变换
颜色阈值 (Color Thresholding)
A coloured image is made of a stack of 3 images, each corresponding to red, green and blue channels. The above image can be split into three separate images as shown below
彩色图像由3个图像的堆栈构成,每个图像对应于红色,绿色和蓝色通道。 上面的图像可以分为三个单独的图像,如下所示
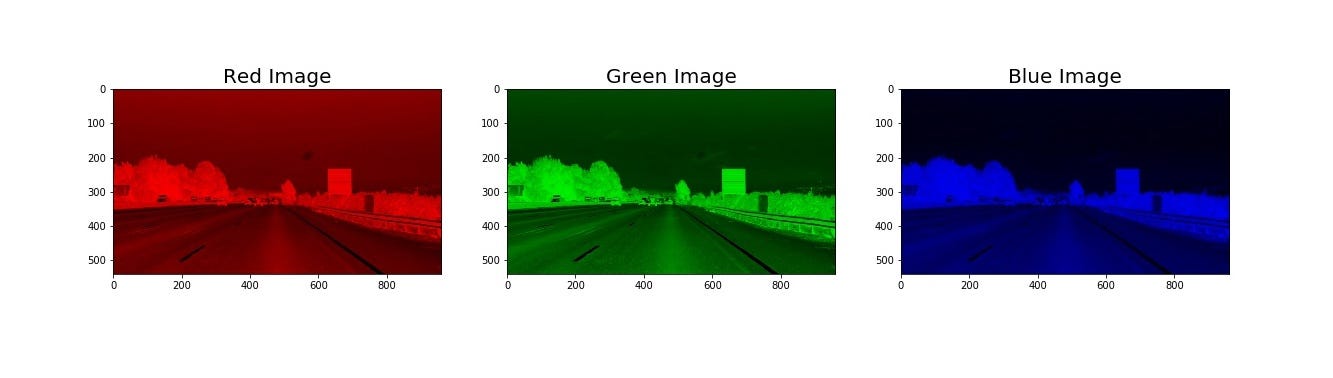
An image is a matrix of pixels, whose values range from 0 (dark) to 255 (white).
图像是一个像素矩阵,其值的范围从0(暗)到255(白)。
Since lanes are white markings on the road, these can be identified, by filtering out pixels, whose values are less than a certain threshold. By choosing the right thresholds, the following output can be produced.
由于车道是道路上的白色标记,因此可以通过滤除值小于特定阈值的像素来识别这些标记。 通过选择正确的阈值,可以产生以下输出。

However, this does not fully solve our problem, because you can see other white spots in the image, that are not lanes.
但是,这不能完全解决我们的问题,因为 您会看到图像中的其他白色斑点,而不是车道 。
区域遮罩 (Region Masking)
Assuming the camera that took pictures of the road is mounted on a fixed position in the front of the car, the lane lines will always appear around a general region of the image. Applying that region of interest to the images (blue dotted region) , we are now able to eliminate non lane lines, as shown below.
假设为道路拍照的摄像机安装在汽车前部的固定位置,则车道线将始终出现在图像的整个区域周围。 将感兴趣的区域应用于图像(蓝色虚线区域),我们现在可以消除非泳道线,如下所示。
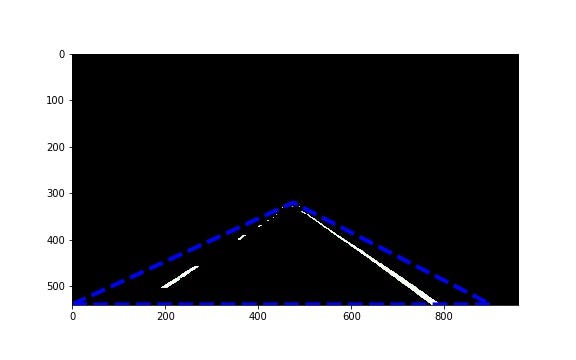
However, under varying lighting conditions (day, night, shade etc) and lane colours (yellow etc) , the two techniques we looked at so far, may fail to detect lanes. Hence the need for more sophisticated algorithms.
但是,在变化的光照条件(白天,夜晚,阴影等)和车道颜色(黄色等)下,到目前为止,我们看过的两种技术可能无法检测到车道 。 因此,需要更复杂的算法。
坎尼边缘检测 (Canny Edge Detection)
This techniques helps find edges of objects in an image.
此技术有助于查找图像中对象的边缘。

Since we are only interested in finding edges, we first convert the coloured image into a grayscale image, as shown below.
由于我们只对寻找边缘感兴趣,因此我们首先将彩色图像转换为灰度图像,如下所示。

An image is a mathematical function f(x , y) of pixels, so you can perform mathematical functions on it.
图像是像素的数学函数f(x,y),因此您可以在图像上执行数学函数。
The brightness of each pixel corresponds to the strength of the gradient at that point. We find edge pixels by tracing out the pixels that follow the strongest gradients. By identifying edges, we can more easily detect objects by their shape.
吨他亮度每个像素对应的在该点处的梯度的强度。 我们通过追踪遵循最强渐变的像素来找到边缘像素。 通过识别边缘,我们可以更轻松地通过物体的形状检测物体。
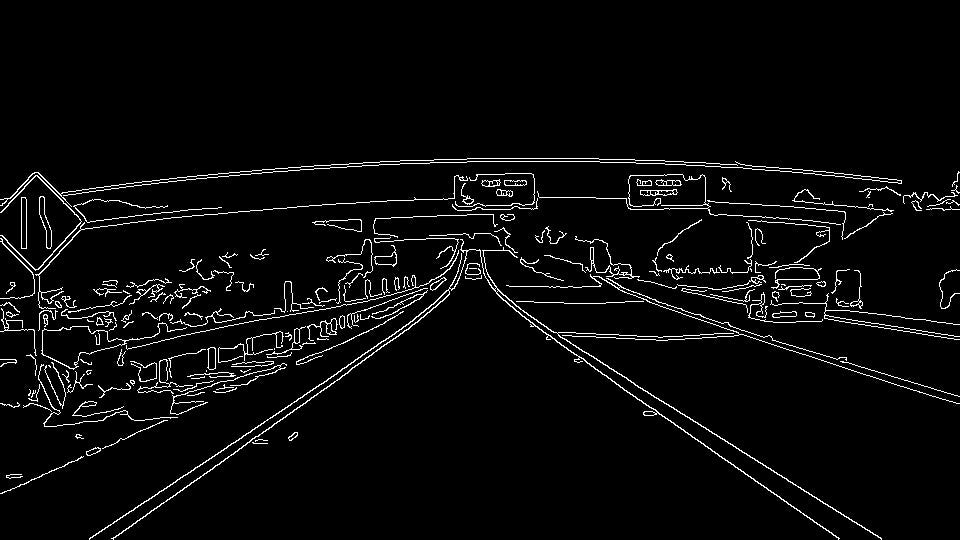
The output of applying canny edge detection algorithm, shows an image full of dots, that represent edges of lane lines as well as other objects.
应用Canny边缘检测算法的输出显示了一个 充满点 的 图像 ,这些 点 代表车道线 以及其他对象的 边缘 。
霍夫变换 (Hough Transformation)
Since we are interested in finding lane lines only, we can model a line, and then fit that line model to the assortment of dots, to detect lane lines. To make it easier to work with lots of dots, we use hough space.
小号因斯我们感兴趣的只是发现的车道线 ,我们可以模拟线,然后适应该行模型点的品种,以检测车道线。 为了使处理许多点更容易,我们使用了霍夫空间。
A point in image space represents a line in the hough space and vice versa. By using polar co-ordinates, a dot in image space is transformed (hough transformation) into sine curve in hough space.
图像空间中的点表示霍夫空间中的一条线,反之亦然。 通过使用极坐标,图像空间中的点被转换(霍夫变换)为霍夫空间中的正弦曲线。
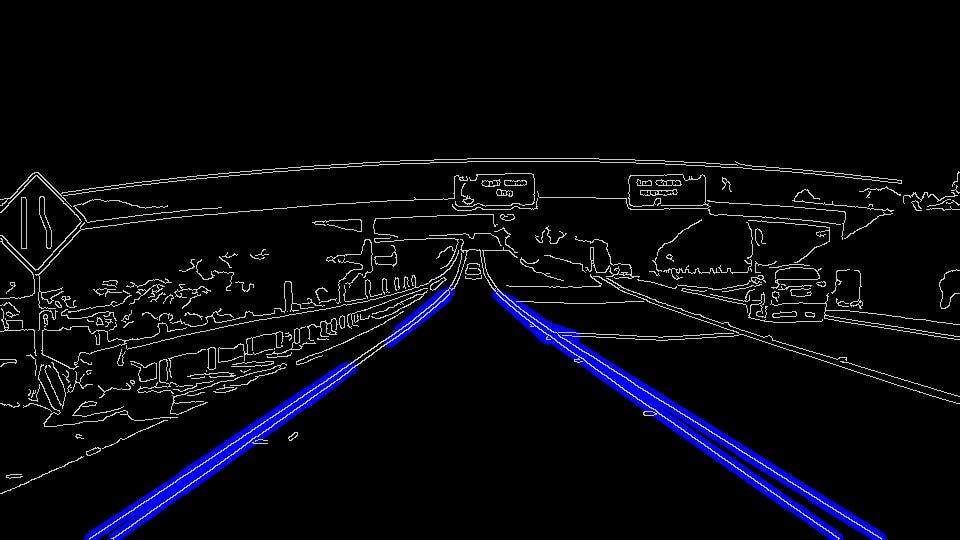
After applying Hough transformation, on the canny edge detected image, and performing parameter tuning, we are now able to detect lanes, as shown below.
在应用Hough变换之后,在检测到的Canny边缘上执行了参数调整之后,我们现在可以检测到车道,如下所示。
结果:无人驾驶汽车在行动 (Results : Self Driving Car In Action)
Application of the above techniques resulted in the car accurately identifying lanes, as shown in the video below.
上述技术的应用使汽车能够准确识别车道,如下视频所示。
Even though my algorithm was able to detect lanes accurately in the above video, it might fail to detect lanes correctly in several other cases. Such cases could include a combination of different conditions, like lighting (day, night, shade), curves etc.
即使我的算法能够在上述视频中准确检测车道,但在其他几种情况下也可能无法正确检测车道。 这种情况可能包括不同条件的组合,例如照明(白天,黑夜,阴影),曲线等。
These short comings were addressed in the next article (see link below)
这些缺点在下一篇文章中得到了解决(请参见下面的链接)
The final video is the output of my ‘Finding Lane Lines Project’, of the Udacity self driving car nano-degree program.
最后的视频是我的“ Finding Lane Lines Project”(我的“ Finding Lane Lines Project”)的输出,它是Udacity无人驾驶汽车纳米级程序的输出。
Originally published at https://github.com.
最初发布在 https://github.com 。
翻译自: https://medium.com/swlh/4-techniques-self-driving-cars-can-use-to-find-lanes-fcb6dd06b633
用于无人驾驶技术的车道线
http://www.taodudu.cc/news/show-1874020.html
相关文章:
- q-learning_教计算机如何通过Q-Learning玩Snake
- 深度强化学习从入门到大师_深度学习大师的经验教训
- 自然语言处理 入门_自然语言处理入门指南
- 变形金刚图纸_变形金刚救援
- 传感器数据 数据库_丰富的数据,不良的数据:充分利用传感器
- 使用高德地图打车软件实现_强化学习:使用Q学习来打车!
- aws fargate_使用AWS Fargate部署PyCaret和Streamlit应用程序-无服务器基础架构
- ai-人工智能的本质和未来_带有人工智能的动画电子设备-带来难以想象的结果...
- 世界第一个聊天机器人源代码_这是世界上第一个“活着”的机器人
- pytorch深度学习入门_立即学习AI:01 — Pytorch入门
- 深度学习将灰度图着色_使用DeOldify着色和还原灰度图像和视频
- 深度神经网络 卷积神经网络_改善深度神经网络
- 采矿协议_采矿电信产品推荐
- 机器人控制学习机器编程代码_机器学习正在征服显式编程
- 强化学习在游戏中的作用_游戏中的强化学习
- 你在想什么?
- 如何识别媒体偏见_面部识别,种族偏见和非洲执法
- openai-gpt_GPT-3 101:简介
- YOLOv5与Faster RCNN相比。 谁赢?
- 句子匹配 无监督_在无监督的情况下创建可解释的句子表示形式
- 科技创新 可持续发展 论坛_可持续发展时间
- Pareidolia — AI的艺术教学
- 个性化推荐系统_推荐系统,个性化预测和优点
- 自己对行业未来发展的认知_我们正在建立的认知未来
- 汤国安mooc实验数据_用漂亮的汤建立自己的数据集
- python开发助理s_如何使用Python构建自己的AI个人助理
- 学习遗忘曲线_级联相关,被遗忘的学习架构
- 她玩游戏好都不准我玩游戏了_我们可以玩游戏吗?
- ai人工智能有哪些_进入AI有多么简单
- 深度学习分类pytorch_立即学习AI:02 —使用PyTorch进行分类问题简介
用于无人驾驶技术的车道线_自动驾驶汽车可用于查找车道的4种技术相关推荐
- 毕业设计 - 车道线检测(自动驾驶 机器视觉)
文章目录 0 前言 1 车道线检测 2 目标 3 检测思路 4 代码实现 4.1 视频图像加载 4.2 车道线区域 4.3 区域 4.4 canny 边缘检测 4.5 霍夫变换(Hough trans ...
- 单目摄像头光学图像测距_自动驾驶汽车传感器技术解析——车载摄像头
智能驾驶汽车之眼 车载摄像头是实现众多预警.识别类ADAS功能的基础.在众多ADAS功能中,视觉影像处理系统较为基础,而摄像头又是视觉影像处理系统的输入,因此车载摄像头对于智能驾驶必不可少. 摄像头可 ...
- 自动驾驶汽车可用于处理急转弯的 3 种技术
点击上方"小白学视觉",选择加"星标"或"置顶" 重磅干货,第一时间送达 自动驾驶汽车需要感知不同颜色和不同光照条件下的车道线,才能准确检测 ...
- 红外倒车雷达原理图_自动驾驶汽车传感器技术解析—毫米波雷达
毫米波雷达的优势在全天候工作,即不良天气.夜晚等环境下可以发挥作用,而激光雷达会受雨雪雾霾的影响:并且毫米波雷达测距远,200 米以上都轻易胜任,但是分辨率低.较难成像,无法识别图像. 由于毫米波雷达 ...
- 路径规划算法_自动驾驶汽车路径规划算法浅析
自动驾驶汽车的路径规划算法最早源于机器人的路径规划研究,但是就工况而言却比机器人的路径规划复杂得多,自动驾驶车辆需要考虑车速.道路的附着情况.车辆最小转弯半径.外界天气环境等因素. 本文将为大家介绍四 ...
- python识别几何图形拼成的图案_自动驾驶汽车视觉- 图像特征提取与匹配技术
Feature detection and matching Email: williamhyin@outlook.com 特征提取和匹配是许多计算机视觉应用中的一个重要任务,广泛运用在运动结构.图像 ...
- 把地图中的道路以线条提取出来_自动驾驶中基于车道线的高清制图方法回顾
来源:知乎 HD Map,高清地图,在自动驾驶领域被看得很重,因为它能提供prior知识,让感知难度降低,同时让规划有的放矢. 高清地图目前有两条路,即激光雷达扫描为主的高成本制图方法和摄像头为主的低 ...
- 自动驾驶汽车的安全技术特点
"安全第一"是自动驾驶的核心理念和价值观.自动驾驶车辆的整体系统安全设计是一项复杂的系统工程, 涉及车载自动驾驶系统的核心算法策略设计. 硬件和软件冗余安全设计.远程云代驾技术. ...
- Chapter1.2:自动驾驶汽车的产生
本系列博客包括6个专栏,分别为:<自动驾驶技术概览>.<自动驾驶汽车平台技术基础>.<自动驾驶汽车定位技术>.<自动驾驶汽车环境感知>.<自动驾驶 ...
- 端到端深度学习在自动驾驶汽车上的应用
2016 年 9 月 23-24 日,由 CSDN 和创新工场联合主办的"MDCC 2016 移动开发者大会• 中国"(Mobile Developer Conference Ch ...
最新文章
- dokuwiki 部署笔记
- 思科路由器debug基本操作和简单配置
- 欧拉函数 cojs 2181. 打表
- 助教总结-【北京电子科技学院_2016-2017-2_程序设计与数据结构】
- Redis 6.0 源码阅读笔记(4) -- String 数据类型源码分析
- Collectors.maxBy()和minBy()
- C++调用V8与JS交互
- 城市轨道交通运营管理属于什么院系_2020年报考山东交通职业学院城市轨道交通运营管理专业怎么样...
- JSP九大内置对象和四大作用域
- svn之回滚到指定版本
- mysql设备采集数据_怎么将PLC设备数据采集到SQL数据库
- 华为P9移动定制版刷为联通移动双4G版本
- 虚拟机中Ubuntu安装中文输入法(谷歌输入法)
- 电视剧《乡村爱情2》之演员表(ZT)
- Composer加载的symfony/var-dumper类库 字体大小样式设置
- python我想对你说_python学习第15天----名称空间、组合
- 达人评测 R7 PRO 6850HS 核显相当于什么显卡
- react18中使用react-hook-form
- 使用Qt创建一个C语言工程
- Https请求报错:unable to find valid certification path to requested target