DBSCAN聚类算法简介
DBSCAN(Density—Based Spatial Clustering of Application with Noise)算法是一种典型的基于密度的聚类方法。它将簇定义为密度相连的点的最大集合,能够把具有足够密度的区域划分为簇,并可以在有噪音的空间数据集中发现任意形状的簇。
1. 基本概念
DBSCAN 算法中有两个重要参数:Eps 和 MmPtS。Eps 是定义密度时的邻域半径,MmPts 为定义核心点时的阈值。
在 DBSCAN 算法中将数据点分为以下 3 类。
1)核心点
如果一个对象在其半径 Eps 内含有超过 MmPts 数目的点,则该对象为核心点。
2)边界点
如果一个对象在其半径 Eps 内含有点的数量小于 MinPts,但是该对象落在核心点的邻域内,则该对象为边界点。
3)噪音点
如果一个对象既不是核心点也不是边界点,则该对象为噪音点。
通俗地讲,核心点对应稠密区域内部的点,边界点对应稠密区域边缘的点,而噪音点对应稀疏区域中的点。
在图 1 中,假设 MinPts=5,Eps 如图中箭头线所示,则点 A 为核心点,点 B 为边界点,点 C 为噪音点。点 A 因为在其 Eps 邻域内含有 7 个点,超过了 Eps=5,所以是核心点。
点 E 和点 C 因为在其 Eps 邻域內含有点的个数均少于 5,所以不是核心点;点 B 因为落在了点 A 的 Eps 邻域内,所以点 B 是边界点;点 C 因为没有落在任何核心点的邻域内,所以是噪音点。
图 1 DBSCAN算法数据点类型示意
进一步来讲,DBSCAN 算法还涉及以下一些概念。
| 名称 | 说明 |
|---|---|
| Eps 邻域 | 简单来讲就是与点的距离小于等于 Eps 的所有点的集合。 |
| 直接密度可达 | 如果点 p 在核心点 q 的 Eps 邻域內,则称数据对象 p 从数据对象 q 出发是直接密度可达的。 |
| 密度可达 |
如果存在数据对象链  是从 是从 关于 Eps 和 MinPts 直接密度可达的,则数据对象 关于 Eps 和 MinPts 直接密度可达的,则数据对象  是从数据对象 是从数据对象  关于 EpsMinPts 密度可达的。 关于 EpsMinPts 密度可达的。
|
| 密度相连 | 对于对象 p 和对象 q,如果存在核心对象样本 o,使数据对象 p 和对象 q 均从 o 密度可达,则称 p 和 q 密度相连。显然,密度相连具有对称性。 |
| 密度聚类簇 | 由一个核心点和与其密度可达的所有对象构成一个密度聚类簇。 |
图 2 直接密度可达和密度可达示意
在图 2 中,点 a 为核心点,点 b 为边界点,并且因为 a 直接密度可达 b。但是 b 不直接密度可达 a(因为 b 不是一个核心点)。因为 c 直接密度可达 a,a 直接密度可达 b,所以 c 密度可达 b。但是因为 b 不直接密度可达 a,所以 b 不密度可达 c。但是 b 和 c 密度相连。
2. 算法描述
DBSCAN 算法对簇的定义很简单,由密度可达关系导出的最大密度相连的样本集合,即为最终聚类的一个簇。
DBSCAN 算法的簇里面可以有一个或者多个核心点。如果只有一个核心点,则簇里其他的非核心点样本都在这个核心点的 Eps 邻域里。如果有多个核心点,则簇里的任意一个核心点的 Eps 邻域中一定有一个其他的核心点,否则这两个核心点无法密度可达。这些核心点的 Eps 邻域里所有的样本的集合组成一个 DBSCAN 聚类簇。
DBSCAN算法的描述如下。
- 输入:数据集,邻域半径 Eps,邻域中数据对象数目阈值 MinPts;
- 输出:密度联通簇。
处理流程如下。
1)从数据集中任意选取一个数据对象点 p;
2)如果对于参数 Eps 和 MinPts,所选取的数据对象点 p 为核心点,则找出所有从 p 密度可达的数据对象点,形成一个簇;
3)如果选取的数据对象点 p 是边缘点,选取另一个数据对象点;
4)重复(2)、(3)步,直到所有点被处理。
DBSCAN 算法的计算复杂的度为 O(n²),n 为数据对象的数目。这种算法对于输入参数 Eps 和 MinPts 是敏感的。
3. 算法实例
下面给出一个样本数据集,如表 1 所示,并对其实施 DBSCAN 算法进行聚类,取 Eps=3,MinPts=3。
| p1 | p2 | p3 | p4 | p5 | p6 | p7 | p8 | p9 | p10 | p11 | p12 | p13 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 2 | 4 | 5 | 6 | 6 | 7 | 9 | 1 | 3 | 5 | 3 |
| 2 | 1 | 4 | 3 | 8 | 7 | 9 | 9 | 5 | 12 | 12 | 12 | 3 |
数据集中的样本数据在二维空间内的表示如图 3 所示。
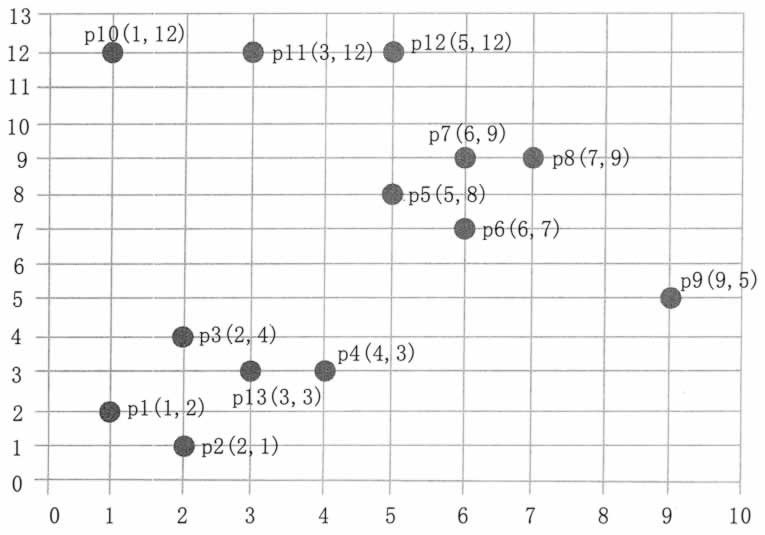
图 3 直接密度可达和密度可达示意
第一步,顺序扫描数据集的样本点,首先取到 p1(1,2)。
1)计算 p1 的邻域,计算出每一点到 p1 的距离,如 d(p1,p2)=sqrt(1+1)=1.414。
2)根据每个样本点到 p1 的距离,计算出 p1 的 Eps 邻域为 {p1,p2,p3,p13}。
3)因为 p1 的 Eps 邻域含有 4 个点,大于 MinPts(3),所以,p1 为核心点。
4)以 p1 为核心点建立簇 C1,即找出所有从 p1 密度可达的点。
5)p1 邻域内的点都是 p1 直接密度可达的点,所以都属于C1。
6)寻找 p1 密度可达的点,p2 的邻域为 {p1,p2,p3,p4,p13},因为 p1 密度可达 p2,p2 密度可达 p4,所以 p1 密度可达 p4,因此 p4 也属于 C1。
7)p3 的邻域为 {p1,p2,p3,p4,p13},p13的邻域为 {p1,p2,p3,p4,p13},p3 和 p13 都是核心点,但是它们邻域的点都已经在 Cl 中。
8)P4 的邻域为 {p3,p4,p13},为核心点,其邻域内的所有点都已经被处理。
9)此时,以 p1 为核心点出发的那些密度可达的对象都全部处理完毕,得到簇C1,包含点 {p1,p2,p3,p13,p4}。
第二步,继续顺序扫描数据集的样本点,取到p5(5,8)。
1)计算 p5 的邻域,计算出每一点到 p5 的距离,如 d(p1,p8)-sqrt(4+1)=2.236。
2)根据每个样本点到 p5 的距离,计算出p5的Eps邻域为{p5,p6,p7,p8}。
3)因为 p5 的 Eps 邻域含有 4 个点,大于 MinPts(3),所以,p5 为核心点。
4)以 p5 为核心点建立簇 C2,即找出所有从 p5 密度可达的点,可以获得簇 C2,包含点 {p5,p6,p7,p8}。
第三步,继续顺序扫描数据集的样本点,取到 p9(9,5)。
1)计算出 p9 的 Eps 邻域为 {p9},个数小于 MinPts(3),所以 p9 不是核心点。
2)对 p9 处理结束。
第四步,继续顺序扫描数据集的样本点,取到 p10(1,12)。
1)计算出 p10 的 Eps 邻域为 {p10,pll},个数小于 MinPts(3),所以 p10 不是核心点。
2)对 p10 处理结束。
第五步,继续顺序扫描数据集的样本点,取到 p11(3,12)。
1)计算出 p11 的 Eps 邻域为 {p11,p10,p12},个数等于 MinPts(3),所以 p11 是核心点。
2)从 p12 的邻域为 {p12,p11},不是核心点。
3)以 p11 为核心点建立簇 C3,包含点 {p11,p10,p12}。
第六步,继续扫描数据的样本点,p12、p13 都已经被处理过,算法结束。
4. 算法优缺点
和传统的 k-means 算法相比,DBSCAN 算法不需要输入簇数 k 而且可以发现任意形状的聚类簇,同时,在聚类时可以找出异常点。
DBSCAN 算法的主要优点如下。
1)可以对任意形状的稠密数据集进行聚类,而 k-means 之类的聚类算法一般只适用于凸数据集。
2)可以在聚类的同时发现异常点,对数据集中的异常点不敏感。
3)聚类结果没有偏倚,而 k-means 之类的聚类算法的初始值对聚类结果有很大影响。
DBSCAN 算法的主要缺点如下。
1)样本集的密度不均匀、聚类间距差相差很大时,聚类质量较差,这时用 DBSCAN 算法一般不适合。
2)样本集较大时,聚类收敛时间较长,此时可以对搜索最近邻时建立的 KD 树或者球树进行规模限制来进行改进。
3)调试参数比较复杂时,主要需要对距离阈值 Eps,邻域样本数阈值 MinPts 进行联合调参,不同的参数组合对最后的聚类效果有较大影响。
4)对于整个数据集只采用了一组参数。如果数据集中存在不同密度的簇或者嵌套簇,则 DBSCAN 算法不能处理。为了解决这个问题,有人提出了 OPTICS 算法。
5)DBSCAN 算法可过滤噪声点,这同时也是其缺点,这造成了其不适用于某些领域,如对网络安全领域中恶意攻击的判断。
推荐学习目录:58.Apriori算法和FP-Tree算法
59.基于大数据的精准营销
DBSCAN聚类算法简介相关推荐
- dbscan聚类算法_一种视频人群流的轨迹聚类方法
tags: KLT光流法,K-means聚类算法,DBSCAN聚类算法 方法简介 运动轨迹是一种在视频场景中捕捉复杂时间动态的有效方法.因此,我们将人流分割问题转化为一个轨迹提取和聚类任务.该方法分为 ...
- PCL 点云DBSCAN聚类算法
文章目录 一.简介 二.实现代码 三.实现效果 参考资料 一.简介 关于DBSCAN聚类算法的原理可以看之前的文章:点云DBSCAN聚类算法(C++),这里仅仅是对该算法进行了整理,让它可以支持PCL ...
- dbscan算法c语言实现,用C++实现DBSCAN聚类算法
这几天由于工作需要,对DBSCAN聚类算法进行了C++的实现.时间复杂度O(n^2),主要花在算每个点领域内的点上.算法很简单,现共享大家参考,也希望有更多交流. 数据点类型描述如下: 复制代码 代码 ...
- DBSCAN聚类算法原理及图解
DBSCAN(Density-Based Spatial Clustering of Applications with Noise,具有噪声的基于密度的聚类方法)是一种很典型的密度聚类算法,和K-M ...
- K-means与DBSCAN聚类算法
K-means与DBSCAN聚类算法 前言:目前数据聚类方法大体上可以分为划分式聚类方法(Partition-based Methods).基于密度的聚类方法(Density-based method ...
- python:实现DBSCAN聚类算法(附完整源码)
python:实现DBSCAN聚类算法 print(__doc__)# 引入相关包import numpy as npfrom sklearn.cluster import DBSCANfrom sk ...
- 毫米波雷达点云 DBSCAN聚类算法
毫米雷达点云 DBSCAN聚类算法 聚类的目的 聚类算法分类 原型聚类 层次聚类 密度聚类 DBSCAN聚类算法原理 相关定义 算法流程以及伪代码 DBSCAN算法优缺点 DBSCAN参数选择 聚类衡 ...
- dbscan算法_如何掌握用于机器学习的流行DBSCAN聚类算法
总览 DBSCAN聚类是一种针对无监督学习问题而被低估但非常有用的聚类算法 了解DBSCAN集群如何工作,为什么要学习以及如何在Python中实现DBSCAN集群 介绍 掌握无监督学习为数据科学家开辟 ...
- k-means聚类算法简介及正态分布实例演示
一.k-means聚类算法简介 1.什么是聚类 聚类是一个将数据集中在某些方面相似的数据成员进行分类组织的过程,聚类就是一种发现这种内在结构的技术,聚类技术经常 被称为无监督学习. 2.什么是k-me ...
最新文章
- 100.X86的寻址方式
- 重温Javascript(四)-函数
- jsp mysql登录 demo_java jsp+servlet+mysql实现登录网页设计
- logstash关于date时间处理的几种方式总结
- J2EE的十三个技术规范
- 如何使用MATLAB绘制平滑曲线
- 一加10 Pro搭载Pixelworks视觉显示技术;Microland获微软高级专业化认证 | 全球TMT
- 吴恩达 - 机器学习课程笔记(持续更新)
- 盘盘在项目中你常用的那些数组API
- 【408】计算机组成原理第一轮强化笔记
- fedora7 WIFI驱动的加载与wpa_supplicant的配置
- APM一些疑难故障的处理
- 56个JavaScript 实用工具函数助你提升开发效率!
- echarts图例样式单独设置
- MATLAB基础——设置符号变量sym,syms,symfun,symvar
- 验证tomcat安装成功
- flutter enum枚举型
- C语言学习(四)字符串和格式化输入/输出
- 2017.08.20【NOIP提高组】模拟赛B组 【NOIP2014八校联考第4场第2试10.20】星球联盟(alliance)
- 滴滴出行2017秋招编程题