树莓派3B用Ubuntu MATE安装ros
【组件】
树莓派操作系统:Ubuntu MATE 16.04 LTS
ROS 版本:ROS Kinetic Kame
工作机操作系统: Windows 10
【系统安装】
1、下载 Ubuntu MATE 16.04.2 LTS for Raspberry Pi 并解压出 img 文件。
2、用 SDFormatter 格式化 sd 卡。
3、用 Win32 Disk Imager 将 img 写入 sd 卡。
4、将 sd 卡插入树莓派板子,接上显示器、键盘等外设,通电后按照提示完成系统安装。
注意 Ubuntu MATE 并不同于官方的 raspbian 系统,实实在在需要安装,并不能无显示器完成安装。
5、Ubuntu MATE 16.04.2 LTS for Raspberry Pi 虽然已经预置了有线网卡和无线网卡的驱动,但可能装好系统后并不能连接 WIFI,重启即可。
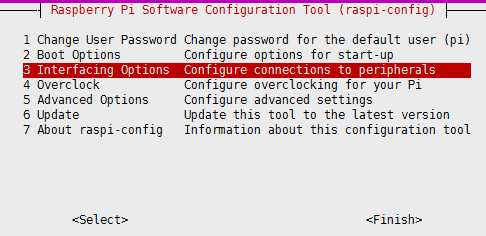
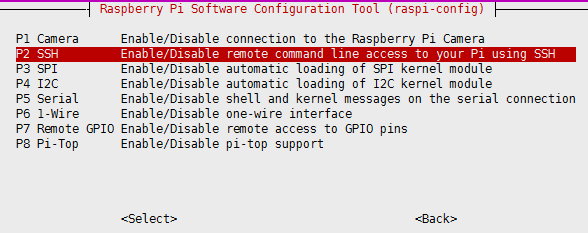
【开启 ssh 服务】
系统已经预装了 ssh 服务,用 raspi-config 开启:
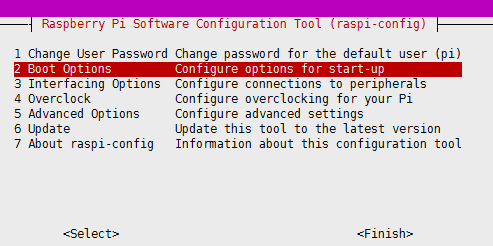
【开机启用命令行】
用 raspi-config 设置开机启用命令行而不是桌面:


卸载桌面可参照:Completely remove MATE desktop from Ubuntu MATE 16.04
【wifi 开机自动连接】
编辑 /etc/NetworkManager/system-connections/essid 文件,将其中 [connection] 节的 permissions 的值清空,然后重启即可见效。注意,essid 为具体连接的名称。
【更改 xenial 软件源】
1、将 /etc/apt/sources.list 的内容替换为:
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial main restricted universe multiversedeb http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-updates main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-updates main restricted universe multiversedeb http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-security main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-security main restricted universe multiversedeb http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-backports main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-backports main restricted universe multiverse2、update
sudo apt update sudo apt upgrade
【安装 ROS Kinetic】
后面按照官方教程就很容易啦:Ubuntu install of ROS Kinetic
1、添加 ros 仓库,并update。
sudo sh -c 'echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116 # or sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116sudo apt update sudo apt upgrade
2、安装 ros 完整带桌面版。
sudo apt install ros-kinetic-desktop-full #大约一个小时
3、初始化 rosdep。
sudo rosdep init rosdep update
4、刷新环境变量。
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc source ~/.bashrc
相关阅读:
1、树莓派3B用raspbian编译ros
2、ROS 常用命令字典
3、树莓派备份镜像 制作镜像 一键制作 脚本(dump/restore)
4、配置VNC可参考 树莓派3B 安装Ubuntu Mate笔记 2.3节
*** walker ***
转载于:https://blog.51cto.com/walkerqt/1947856
树莓派3B用Ubuntu MATE安装ros相关推荐
- 树莓派3B(ubuntu mate)连不上网wifi解决
现象: 想远程用putty连接.用网线连不上,用wifi发现也连不上我的手机热点,接上显示器查看,用iwconfig发现有wlan0,但没有ip地址. 树莓派的自检: 查看树莓派系统 uname -a ...
- 树莓派安装Ubuntu MATE及ROS系统
目录 解锁 SSH 换源 安装VNC服务 安装ROS 初始化rosdep和环境 测试 平台:树莓派4B 系统版本: ubuntu-mate-20.04.1-desktop-armhf+raspi.im ...
- 为树莓派Ubuntu mate系统配置ROS Kinetic+镜像下载
由于在树莓派官网下载镜像真的是太慢了,这里给大家百度网盘下载地址: 链接:https://pan.baidu.com/s/1-Qq2DL9PhaIeEP0sJZrGqg 提取码:880u 按正常方式烧 ...
- 树莓派3B+装ubuntu server后开启wifi
WIFI设置步骤: https://www.cnblogs.com/dingbj/p/rasperpi3B.html 树莓派安装非官方系统没有raspi-config命令的解决方法: https:// ...
- 树莓派Raspbian Buster/Debian 10 安装ROS
目录 一些补充 安装ROS 初始化rosdep 测试 平台:树莓派4B 系统版本: 2020-05-27-raspios-buster-arm64.img 一些补充 系统安装参考 [树莓派学习笔记]一 ...
- 【树莓派】树莓派3B+搭建Ubuntu
相关硬件 树莓派3 B+ 内存卡 Sandisk 32GB 高清HDMI线一条 树莓派电源线一条(5V3A) 读卡器一个 usb键鼠 支持HDMI的显示器 准备SD卡 清空SD卡后,如果当前系统是 L ...
- 树莓派3B+使用镜像烧录安装系统与配置教程(入门向)
设备: Raspberry 3B+开发板一块 显示屏(台式计算机或笔记本电脑.显示屏) HDMI转VGA线或HDMI线或USB视频采集卡(千万不要用HDMI线从树莓派直接连接到显卡的HDMI口或者笔记 ...
- 树莓派3B/4B从零开始编译安装并刷入OpenWrt,让空闲的树莓派变成路由器
不知道是不是全国的大学都一样,在宿舍内用4G网络真的是卡的不得了.这我哪能接受啊?开学没过几天就京东下单了一个TP-Link的路由器,还好学校没啥限制,提供的网线可以直接插WAN口上用.但是没过几天, ...
- linux系统上ros安装,Ubuntu中安装ROS Kinetic
1.安装 ROS Kinetic仅支持Wily(Ubuntu 15.10).Xenial( Ubuntu16.04)和Jessie(Debian 8)的debian软件包. 1.1 配置Ubuntu ...
最新文章
- HTML中的进度条标签的应用progress
- Python 技术篇-容易被忽略的尾差问题
- jacoco入门_代码覆盖度工具jacoco的入门
- iis8 php mysql_windows2012下 iis8+php5.2+mysql5 配置
- docker-compose安装elk7.1.1版本
- [轉]VS2010 UML类图生成代码
- Python 测试(一)—— doctest
- 电力设计手册_10KV及以下供配电设计与安装图集
- 简述hdfs工作原理_简述HDFS的原理?
- 《锋利的JQuery》notes
- 教你用Excel做高级甘特图
- WIFI后台数据一文解释通
- Oracle第二财季业绩表现抢眼 | 搜狗推出“唇语识别”技术 | FF宣布完成超10亿美元A轮融资
- 清华大学尹成 怎么样
- 解决优盘插入电脑后无显示的问题
- 学完这个你就成为excel高手了!(Delphi对Excel的所有操作)逐个试试!
- [转] linux操作系统下c语言编程入门
- C语言实现二、十、十六进制的相互转换
- GPU暗战CPU十年凭什么?
- 简练软考知识点整理-创建工作分解结构过程
热门文章
- android 蓝牙 鼠标 app_邂逅甜蜜告白,雷柏ralemo Air 1气垫鼠标,是女生心动的信号_...
- Android WebView与js交互通信
- 计算机考试一级考试基础知识,2016计算机一级考试msoffice基础知识
- 涨工资一般涨百分之多少_上证50etf期权涨一个点能赚多少钱?
- Java创建MySQL句柄_MySQL创建用户(CREATE USER)
- ubuntu镜像添加jdk_Ubuntu16.0.4安装jdk8
- java 读取 远程文件_利用JAVA获取远程文件及使用断点续传 供学习者使用
- Docker容器管理总结
- Hadoop详解(二):HDFS存储系统设计原理
- 列举ospf的5种报文类型_这5种“专升本”你都知道吗?那个含金量更高呢?报考如何选择?...