camera--(2)双摄的作用
这两年手机的亮点越来越少,高端智能机现在基本都不再去比拼雷兔兔,而开始PK拍照性能。于是乎,这两年各家纷纷开始做起了双Camera。
那问题来了,双Camera到底能做什么?
1、双Camera可以测距,所以可以做距离相关的应用
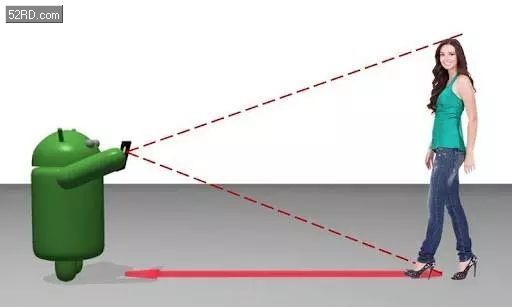
如上图,由于双Camera通过算法,可以判断被摄物体的距离,所以通过此特性,很容易做出一些特效,如:
A: 背景虚化
单反相机最出众的特色之一就是大光圈。由于双Camera可以测出不同被拍摄物体的距离,对需要进行大光圈的物体对准,其他不同距离的物体虚化,可以轻松实现大光圈的效果。

(原图)

(以美女为中心对焦,虚化背景和受伤的蘑菇)

(以蘑菇为中心对焦,虚化背景和美女)
B: 背景替换
由于可以测量距离,可以将被拍摄物体里的主体提取出来,更换背景,就可以比PS还简单,进行抠图。


C: 背景特效 既然可以抠图,只是对背景做一下处理,还是很容易的。比如,此图就用了素描特效。

D: 测量距离
这个图就非常明显的标识出不同物体的距离,这个距离信息用不同颜色标识出来。当AP获得了不同物体的距离信息,就可以做到上述的各种功能。

2. 双Camera 可以做光学变焦
若两个Camera的FOV不一样,一个大FOV,一个小FOV,再通过算法实现两个光学镜头之间的效果,就可以轻松做到光学变焦。
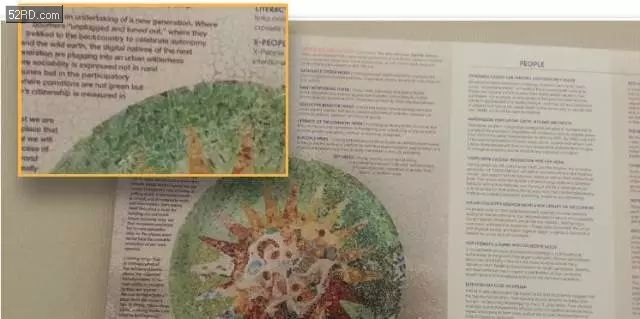
若不用双Camera,放大图片后,文字不清楚
若使用双Camera,放大图片后,文字依然清楚
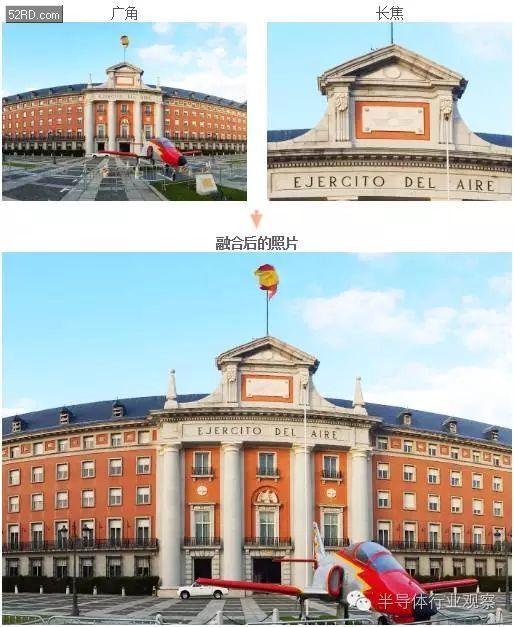
此图就是融合了广角的图和长焦的图,通过算法算出了中间态度照片,让细节不失真。
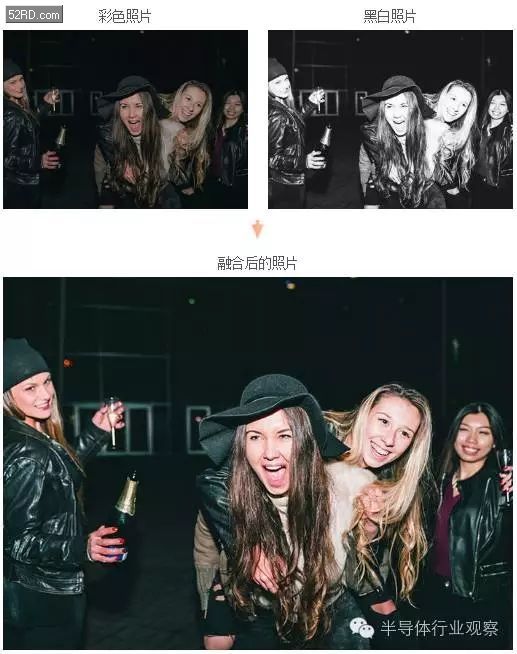
3. 暗光效果增强
这个一般使用彩色+黑白的摄像头。通过黑白摄像头 获取图片的光亮强度,来对图片暗光补偿。
4. 3D拍摄以及3D建模
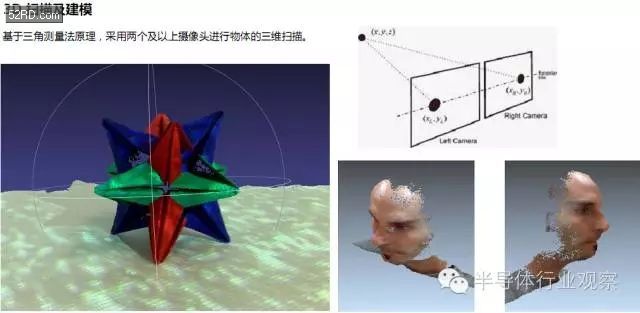
不同于一般的3D电影的拍摄。手机上的两个摄像头无法在图像的拍摄过程中就产生足够的视觉差,这是由于两个摄像头中间的距离和人眼不一样。而且为了能够让人们更明显的得到3D视觉效果。所以往往需要算法进行增强。
由于可以测出距离,后续的双Camera不仅仅可以实现3D摄影,还可以进行3D建模,到这个时候,我想双Camera的重要性则会更加重要。
其他的效果增强,比如HDR,提高分辨率,这些功能其实单Camera也可以实现,只是双Camera可以让效果更好,就不一一列举了。
总结:
目前来看,这几个功能是双Camera手机最常见的功能。背景虚化/更换,暗光效果给用户带来了更多的拍照效果。光学变焦则让我们感受了变焦功能的相机功能。但个人觉得未来最让人激动的则是3D功能。
今年VR这么火,VR的素材哪里来?还是得靠双Camera算法的优化。若3D拍照和建模的算法成熟后,将会让双Camera 变得更加流行。
52RD.com 微博关注:http://weibo
camera--(2)双摄的作用相关推荐
- camera(18)---双摄像头深度剖析 :双Camera的生态链
双摄像头深度剖析 :双Camera的生态链 1.双Camera算法供应商: 由于算法是需要跟ISP配合的,所以算法和ISP是相辅相成的,想把算法做好,也得有好的ISP. 做为主平台供应商,高通/联发科 ...
- Camera:双摄基本原理
基本概念 基线:两镜头的间距 景深:画面清晰范围,景深小(浅)背景虚化,景深大背景清晰 影响景深的三个因素: 光圈(反比,光圈越大景深越小) 焦距(反比,焦距越长景深越小) 摄距(正比,摄距越远景深越 ...
- camera(16)---双摄持续扩散 摄像头供应链阵营变动加剧
双摄持续扩散 摄像头供应链阵营变动加剧 在双摄市场影响下,去年摄像头供应商赚得盆满钵盈,2018年,双摄市场持续扩散,在产业逐渐走向成熟时,摄像头市场的竞争也日趋激烈,而二线摄像头供应链阵营也随之发生 ...
- camera---(4)双摄像头分类
双摄像头分类 我们首先来看双摄像头的分类,一般来说双摄像头分为:large+small.color+mono.wide+tele. 1.large+small large+small是早期双摄比较常用 ...
- camera资料链接整理
camera ---(1) 摄像头图像质量常用指标的测试方法 https://blog.csdn.net/zhangbijun1230/article/details/79563891 camera- ...
- Camera HAL3学习
转自: Camera HAL3学习 Android Camera System Android Camera硬件抽象层(HAL,Hardware Abstraction Layer)主要用于把底层ca ...
- Camera HAL3学习: Android Camera System
Android Camera硬件抽象层(HAL,Hardware Abstraction Layer)主要用于把底层camera drive与硬件和位于android.hardware中的framew ...
- iPhone摄影中的深度捕捉(WWDC2017-Session 507)
视频地址,只能用safari观看 前言 507是深度媒体相关的概念层面的内容.主要为下面4个部分: Depth and disparity on iPhone 7 Plus Streaming dep ...
- AndEngine引擎学习之绘制直线
上午搭建了下AndEngine的环境,运行起来了demo,看起来感觉很不错.这里写了个demo,凡事都要重基础开始学习,在学习android的绘图过程中也是,从如何绘制直线,矩形等到复杂的图像.这里做 ...
最新文章
- python使用界面-python 可视化界面
- linux查看内存、CPU占用资源最多的进程
- eclipse代码发布到服务器(Tomcat)出现乱码现象解决方法
- Node.js的helloworld 程序
- SQL算法中的变量使用占位符动态赋值
- Python基础之补充1
- 【英语学习】【Daily English】U06 Shopping L04 I like everything aboutit but the price.
- merkle tree(hash tree)
- 【翻译】Ext JS 5的委托事件和手势
- 学习3 二维游戏动画合成(侠客行)
- 5个值得安利的PC软件,建议收藏转发
- linux在拥有/etc/xdg的自启动方式
- todd的hadoop world的ppt笔记
- 解决TOC与目录导航冲突问题
- Java SE 8 Archive Downloads (JDK 8u202 and earlier)
- srs linux开机启动,SRS之安装与使用
- 在线文档上传图片失真、压缩、清晰度降低怎么办?
- STM32的中断向量表是干什么的?到底有什么用?它放在哪里?
- Ubuntu18.04录屏并生成gif图片
- 机器人开发--常用仿真软件工具
热门文章
- MuleSoft知识总结-11.Mule基本组件(Transform Message)
- 如何不写代码通过爬虫软件采集表格数据
- frustum pointnets训练代码学习笔记——kitti_object.py
- 网页外链微信公众号文章里的图片显示未经许可无法显示的解决办法
- springboot高校失物招领系统的设计与实现毕业设计源码121441
- 【20230204】Ubuntu系统备份与恢复
- chatbot聊天机器人技术路线汇总
- Tailscale 开源版中文部署指南(支持无限设备数、自定义多网段 、自建中继等高级特性)...
- Java并发包-java.util.concurrent详解
- 排序算法(冒泡排序)