无名创新——2019年TI杯电赛飞行器赛题关键问题汇总
从2018年12月以来,无名创新TI飞控累计服务了全国高校累计超400个电赛飞行器学生团队,无名创新TI系列产品根据客户反馈、市场需求,完成了一次次软硬件迭代升级,比赛临近,针对近期客户担心是否能直接采用成品TI飞控开发板、TI整机二次开发学习平台用于比赛问题,下面给出客户提出的几种可能的情况,在展开讨论前,我们先列出前两年飞行器赛期的赛题要求。
无名创新客户获奖战报
无名创新TI飞控开源公告:https://zhuanlan.zhihu.com/p/54471146
2017年国赛 1、四旋翼自主飞行器探测跟踪系统(瑞萨杯国赛)
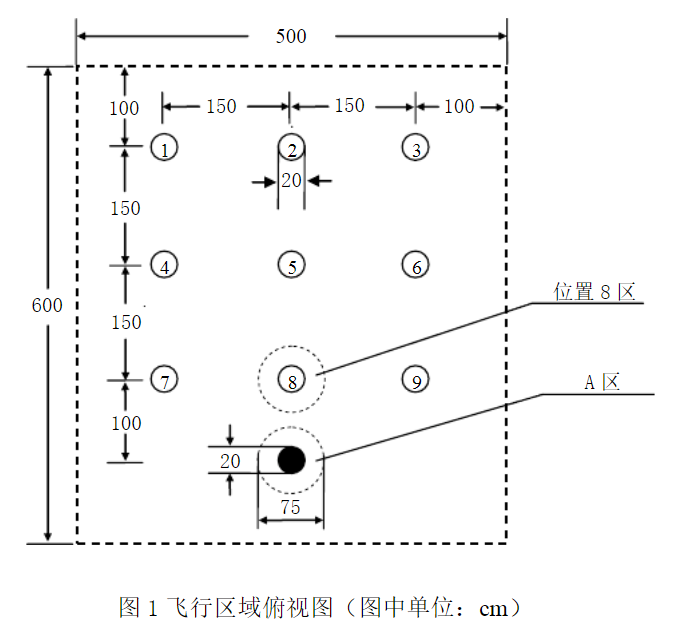
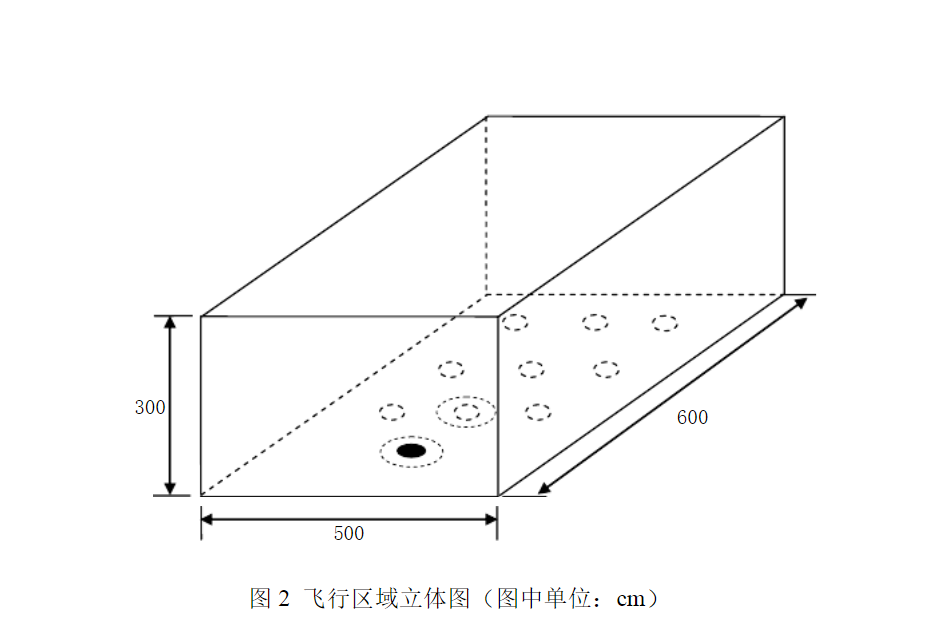
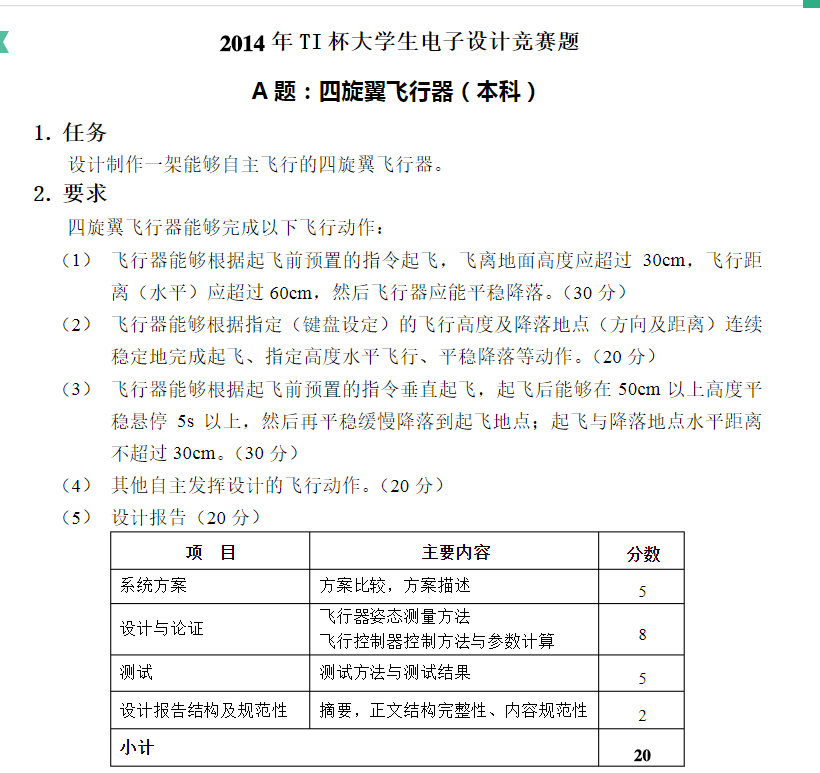
2014年TI杯大学生电子设计竞赛四川省赛题-A题四旋翼飞行器
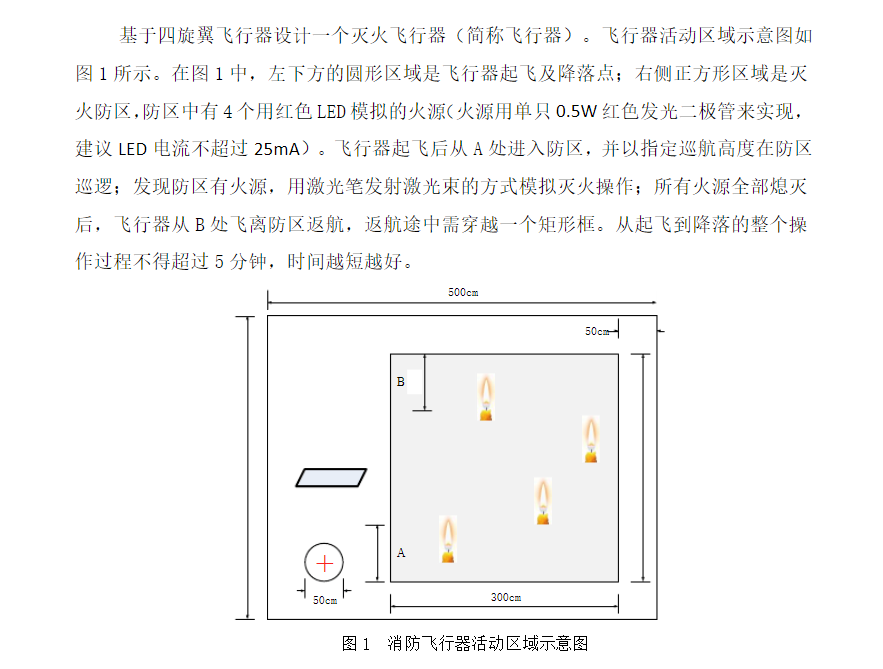
2018年TI杯大学生电子设计竞赛题-灭火飞行器(TI省赛)
基于上述几个信号,我们列出了一下几点,客户广泛讨论的问题,并给出了合乎逻辑的解答。
问:1、电赛控制题是否一定会有飞行器组?
答:是,电赛飞行器组属于常规组,从2013年电赛飞行器题目在控制组设置以来,不管是国赛还是省赛,从未间断过。今年组委会组织相关技术人员,在全国各地举行飞行器培训会议,电赛培训官网首页主推电赛无人机线上培训课程。如果今年TI电赛控制组中没有飞行器题目,组委会没有必要劳民伤财、空耗国力,给大家添堵。(相关资料参考如下)

2、电赛控制组中,是否必须采用TI处理主控平台,如果限定处理器,是否控制组中的飞行器赛题必须在内?
答:是,电赛根据官方通知,2019年TI杯全国大学生电子设计竞赛至少有一道赛题将会指定使用TI处理器,包括但不限于MSP430系列,MSP432系列,Tiva Cortex-M4系列和C2000系列。根据电赛官方培训网站上芯片教程对飞控所需要用到的资源有着重介绍,以及以往TI省赛飞行器处理器限定TI平台,按上面这个逻辑来推理,2019年TI国赛控制组中的飞行器处理芯片限定采用TI处理器基本可以坐实(99.999999%+)。

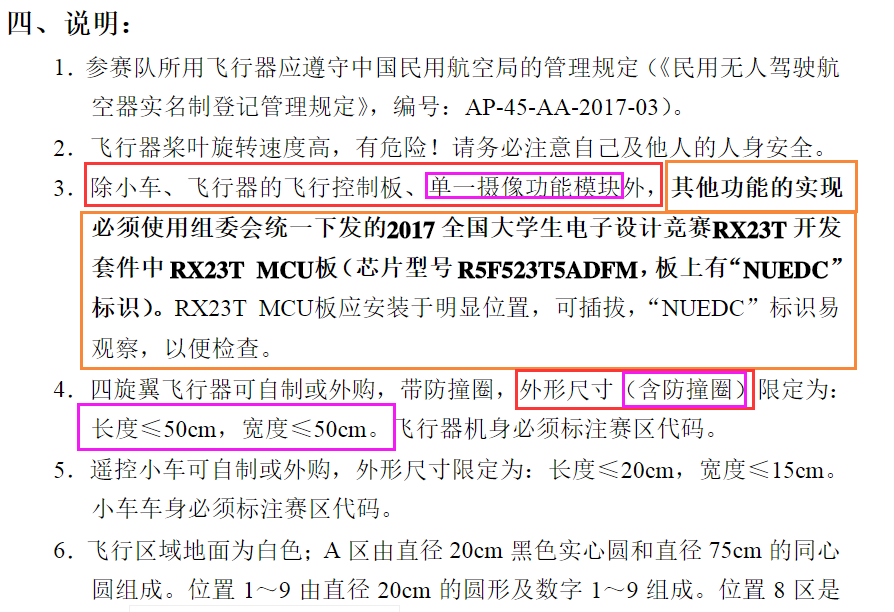
2014年TI省赛飞行器要求
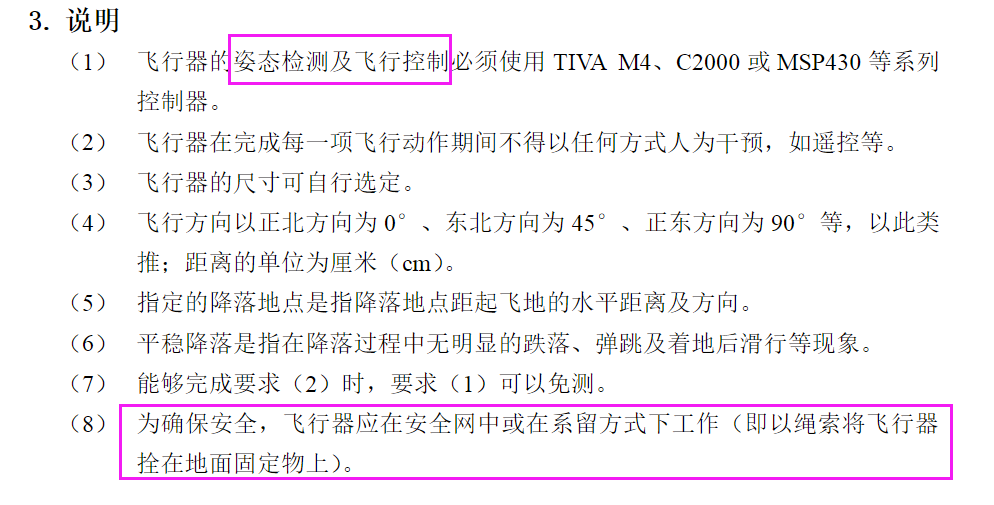
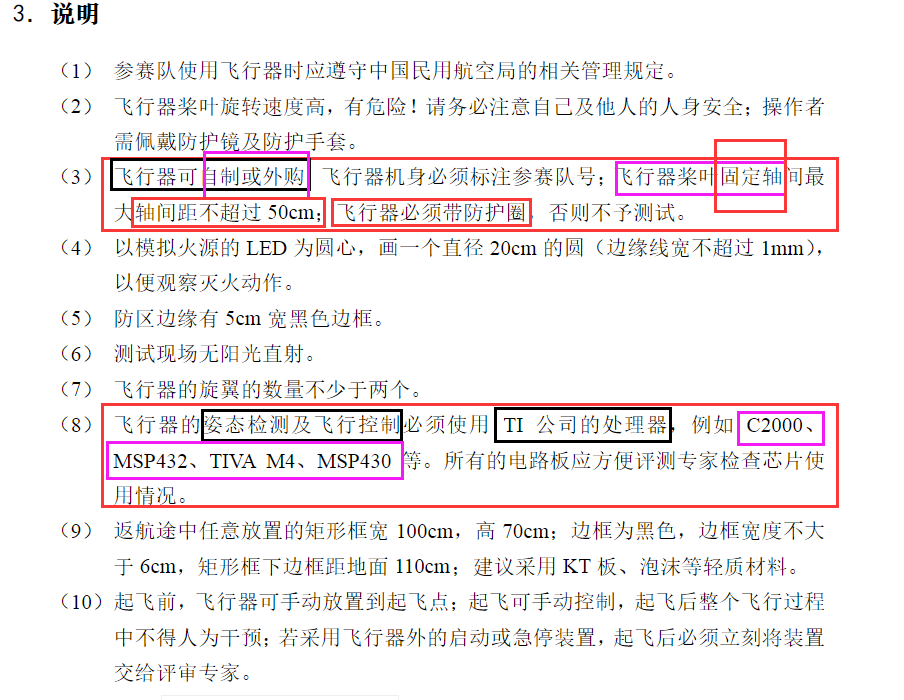
2018年TI省赛飞行器要求
3、电赛飞行器平台限定TI处理器平台,TI芯片处理哪一部分内容,是否能含有其它厂商的处理器平台,主要是无人机视觉处理部分、光流模块等?
答:根据以往TI省赛的要求,飞行器的姿态检测与飞行控制必须使用TI公司的处理器,评测专家需要根据电路板判断TI处理器真实处理了姿态检测与飞行器控制两个部分。首先姿态检测和飞行控制虽然字面很短,实际意义却很丰富,首先讲姿态检测,随着MEMS技术的发展,当前飞行器姿态传感器已经很少见早期航模时代的模拟加速度计、模拟陀螺仪了,主流的姿态传感器与处理器采用数字通讯的方式,如SPI、I2C等。针对单一的常见惯性传感器而言,如MPU6050、ICM20689等,MPU系列是内置DMP(数字运动处理器)解算的,用户可以仍然采用数字通讯的方式直接获取姿态四元数,初始化采样率、量程,校准加速度零位,开启DMP后,MPU内部会自动完成加速度、陀螺仪(磁力计可选)四元数姿态融合过程,外部处理器直接可以通过MPU6050自带的DMP函数mpu_read_fifo函数获取姿态四元数、角速度、加速度数据,得到姿态四元数后通过四元数旋转矩阵与方向余弦矩阵对应关系,通过三角函数运算即可得到姿态数据。若用TI处理器采用DMP读取的方式获取MPU6050姿态传感器数据并最终得到用于飞行器控制的姿态反馈数据。很显然这肯定属于组委会所要求的——采用TI处理器处理飞行器姿态检测的范畴。虽然处理器只是做了初始化配置、数字通讯得到姿态四元数、反三角运算得到姿态反馈。TI处理器省去了像不带的DMP数字惯性传感器,需要TI处理器外部去更新DCM/四元数的过程。之所以做上述陈述是针对引出复杂的实际现状的需要,下面来看一下市面上能买到的姿态测量模块,下面我们去马云家搜下:姿态测量,出来的结果如下

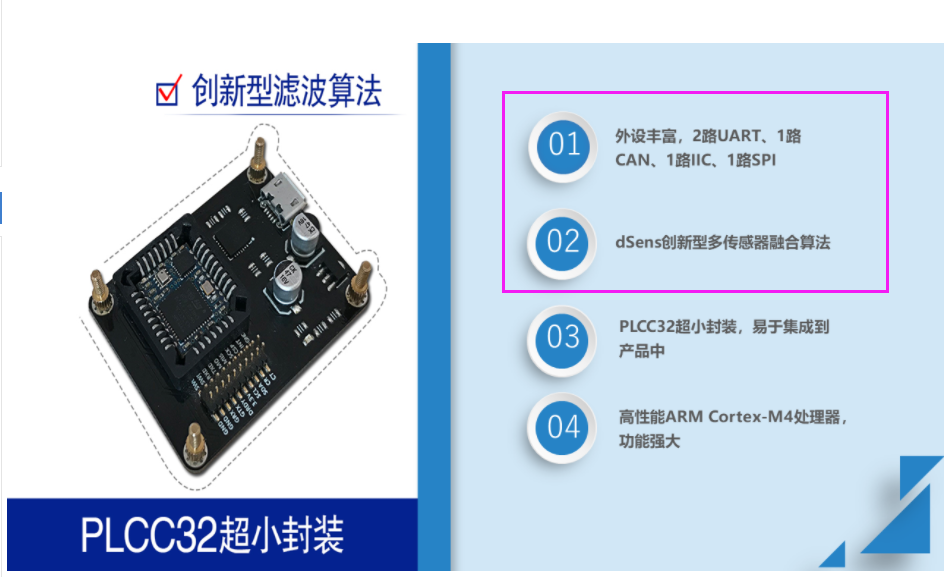
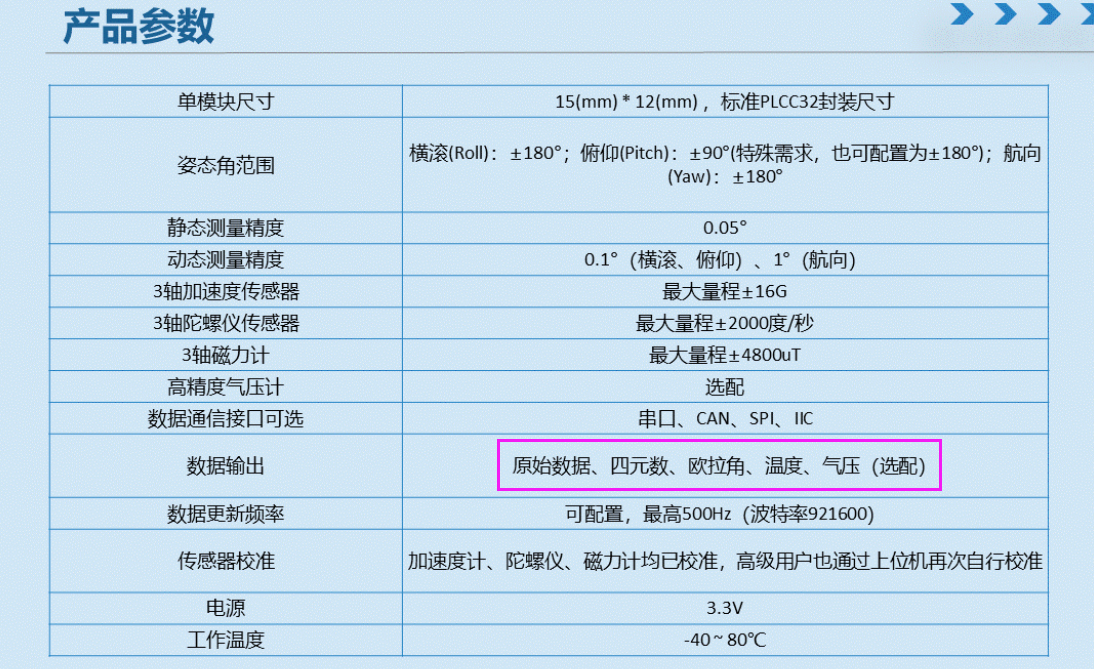
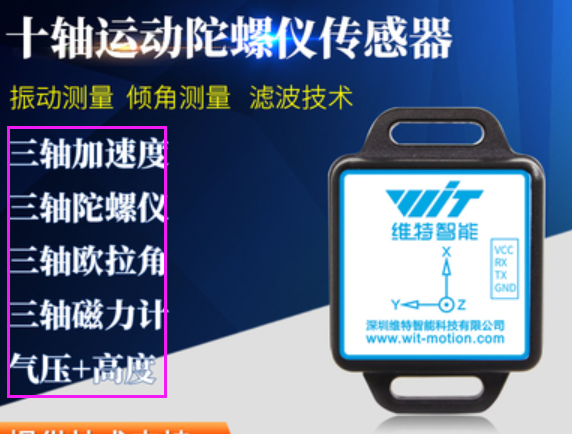
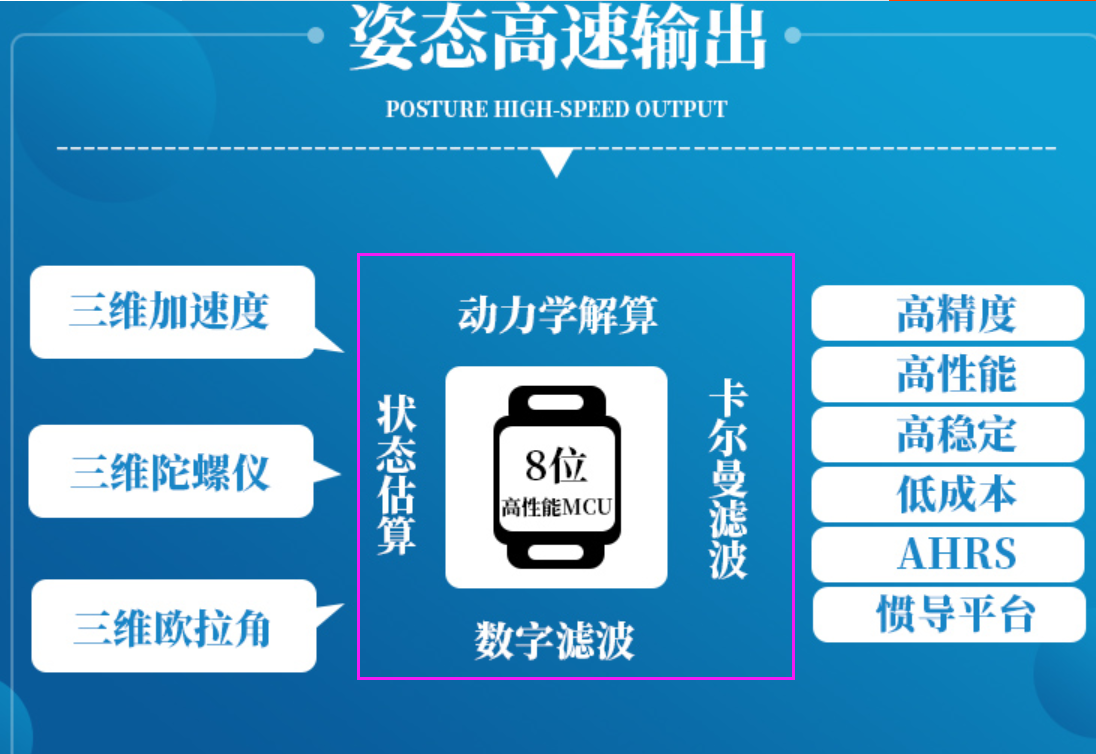
上面给出了市场上能买到的低成本姿态测量模块,测量模块上自带加速度计、陀螺仪、磁力计、气压计等。成品姿态测量模块上带其他厂商的处理器,大多为ST、新唐等公司产品。外部处理器直接可以得到姿态测量模块的姿态角度、高度、速度信息,接口丰富:串口、CAN、SPI、I2C等。显然这种违背了组委会竞赛组限定姿态检测必须采用TI处理器的宗旨,对于姿态检测而言,对于姿态检测这部分而言,飞控什么都不需要干,串口通讯就可以解析到相关厂家研发的IMU/INS融合算法输出的处理好的数据用于飞行器姿态控制。
这里可能会有人有疑问,为什么MPU系列DMP就可以,用这些成品姿态测量模块就不行。同样是传感器检测模块,原因很简单,回到最开始TI电赛竞赛要求上来看,飞控板硬件板电路需要方便评审专家看到芯片确实是有处理姿态检测部分,硬件上来看,TI处理器需要和MEMS数字传感器信号直接连接,而不是像外部姿态检测那样,TI处理器并没有直接和MEMS连接,而是通过数字通讯的方式将外部其他厂商的处理器ST、新唐等,间接的获取处理融合好的姿态数据。
下面有一种可能会误导专家评审,飞控本身硬件自带单独的MEMS数字传感器,有实际硬件连接,由于其他功能需要,模块上面必须接MEMS传感器,如激光雷达、视觉惯性里程计等。这种情况目前很难给评审专家解释得清楚,姿态检测是TI处理器自己完成的,还是来源于外部模块通讯而来的,因为上面我们讨论的实际情况的复杂性,组委会还未考虑在内,在有其他模块可选择的情况下,不建议涉险,除非你自己能保证能跟竞争对手和评委解释的通,实际很难!!!

接着回到TI处理器限定问题上,组委会只是限定必须有TI芯片处理姿态检测部分,并未对高度检测、速度检测限定。而且现有的高度检测模块里面,如HCSR04、US100采用的是新唐或者STM8处理器处理超声波探头的回波数据,激光测距传感器TFMINI采用的是STM32F0处理器,光流传感器LC306也是优像自己的图像处理器。视觉部分OPENMV、树莓派、Jetson、TX2、K210等都是其他厂家的处理器。(姿态检测梳理到此打住,太多了要说了怕讲不完,洗个桃吃了急需)。
飞行控制词面同样很短,指的又是什么呢,控制指的由组合导航系统得到姿态、位置、速度、加速度反馈后,采用控制算法实现三维空间内的位置、速度、姿态等控制,我们把这一部分叫做运动控制。对于飞行器竞赛而言,我们需要结合视觉处理模块,完成特定的功能,这一部分叫做决策层的控制,涉及轨迹跟踪、航点遍历、定速巡航、前视穿越等,任务过程同时还需要有声、光的逻辑提示。
4、上届瑞萨国赛必须用官方的评估版,TI国赛是不是也只能用Launchpad评估版,比赛我们能直接用你们家的成品飞控、整机比赛吗,还有自己参考无名创新自组设计的飞控带自己学校直接、队名Logo的飞控能不能使用?
答:按照上届TI省赛飞行器要求,飞行器可以自制或者外购,意味着组委会允许采用成品飞行器竞赛,只购买成品飞控,自己制作整个飞行器平台的肯定也允许,至于飞控部分自己 用Launchpad评估板、自己独立设计的飞控,组委会没有任何理由不允许大家参赛。
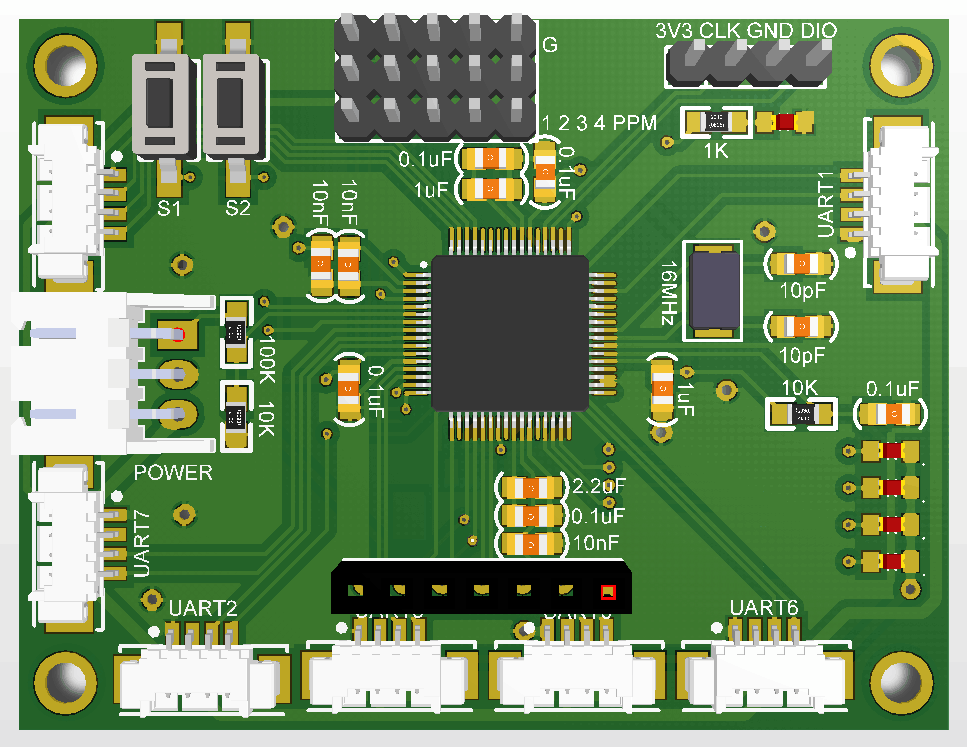
个人猜想目前电赛飞行器赛题考虑到实际水平和该赛题的实际参与现状,没有限定成品飞行器是为了鼓励更多的人参与进来,培养更多无人机行业方向的工程师,等到大家整体实力起来后,传承帮带好,积累相关经验,类似恩智浦智能车竞赛限定自己设计飞控,统一竞赛机型,自然就水到渠成,现在这个时候限定自己设计飞控,绝对是一片哀嚎,不符合实际情况。大家技术都成熟了,后面电赛专科组开设飞行器赛题也不是不可能。下面贴出无名创新客户自己造轮子自主设计飞控的照片。

轮子哥1号
轮子哥2号
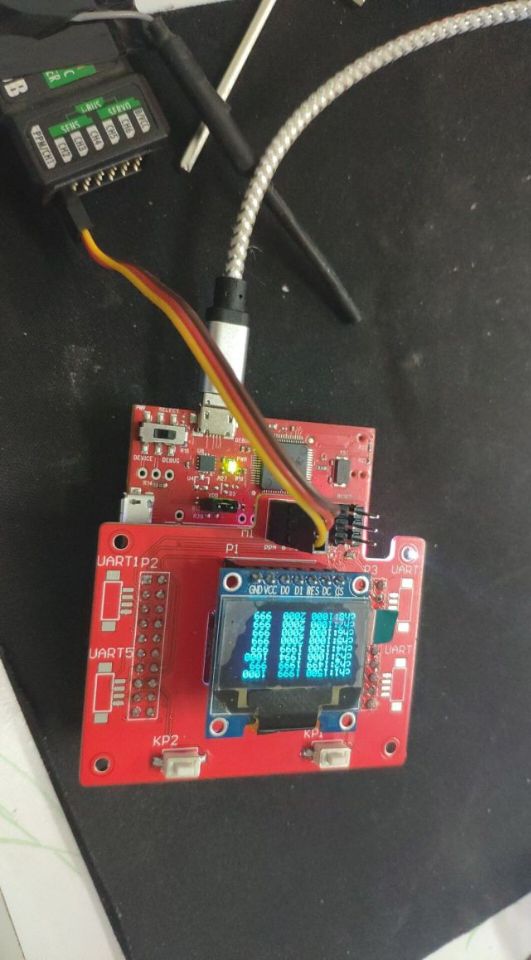
轮子哥3号

轮子哥4号

轮子哥5号
轮子哥6号
截至目前为止,无名创新TIVA飞控累计服务了400多个电赛学生团队,鼓励大家自己造轮子,根据不完全统计,学习之后,自己独立设计飞控的大概有30多个组。绝大多数学习者都有打算设计属于飞控,限于目前学习任务紧、缺乏硬件经验、单枪匹马战斗个人经历有限,暂时还没有自主设计飞控。等比完赛后再设计。
最后针对一直派水军黑无名创新的那个不争气的国内同行,前天做出的气急败坏的自打脸的失败公关行为调侃一下:
情况介绍:我们发布了新款MSP432版本飞控,将光流惯导融合方案开源,在自家技术交流群里发照片宣传,有人提问出新款MSP432,是不是比赛不让用TM4C了,我回复只要是TI芯片都可以,顺便提醒下独立设计飞控的同学,不要买翻新丝印不清晰的芯片,考虑到竞赛要求的所述的TI主控必须独立处理姿态检测部分,建议不要用其它其他协处理器不要有IMU部分,如带新唐、ST的姿态检测模块、视觉惯性里程计等,不然很难跟评审专家解释。结果有人回复是不是匿名那家ST带IMU、高度检测的光流不能用?考虑到接着回复会引起不必要的误会,同时会增加对方对一直以来我们的敌意,没有予以回复。

结果戏剧性的事情发生了,就在晚上这边团队开会时,有在他家交流群的客户把他们的一条公告发给我们一个同事,公告内容如下:
@全体成员 近期有人反馈其他商家点名说不能用匿名光流传感器,因为光流上面有IMU。
凭什么买来的imu代码就可以用?买来的模块带imu就说不清?那6050等自带dmp姿态解算说的清不?
如果组委会限制不能用模块带imu,无非就是想让你自己做姿态解算,那么你看现在是情况,TI开源飞控一大片,要求这个有意义没有?
而且近年来的题目来看,重点已经是在考察视觉识别和导航控制等上层控制功能上了,飞控底层控制未来很可能不作为考察的重点方向,很多年份电赛甚至根本不限制你用什么飞控了。
在规则出来以前,各种可能都有,甚至没有飞机的题也完全有可能。所以,不要相信一些片面之词,自己要客观的分析。
匿名科创团队宣布:
1:本周末推出全开源光流融合、光流定点源码,打消匿名用户的后顾之忧,担心不能用匿名光流的同学,可直接使用原始光流传感器优象lc30x模块,由飞控进行融合、旋转解耦、定点计算。
2:飞控所有功能全开源,全C语言源码形式提供,无汇编、无lib、无任何非开源形式,供大家移植学习。
3:所有TI版交易成功的买家,周末源码发布后都可以免费获取。
4:老版STM32版拓空者PRO用户无法享受?不存在的,因为比赛临近,先照顾下TI参赛用户,先推出TI版开源光流融合,等赛后推出STM32版拓空者PRO的相应源码资料。
5:匿名光流V3版近期更新固件,提升光流性能,相信比赛不会禁止使用成品光流的同学,可以获得更好的定点悬停效果。

上面两幅图为同一人,武汉某高校学生,旺旺ID和QQ时同一人,水军1号出现。

嘴上说不要,身体却很诚实,戏剧性的事情发生了,大家注意看之前的图,为了让大家清楚的观察看出问题,挑起问题的和底下疯狂吹水的是同一人,水军2号出现。
人生如戏,全靠演技,戏精你好,戏精再见!!!
2019年7月13日
凌晨2点48分
无名小哥:余义
无名创新——2019年TI杯电赛飞行器赛题关键问题汇总相关推荐
- 都2021年了,你还在考虑电赛飞行器赛题,备赛是否有必要用基于TI处理芯片的飞控问题?
无名创新售后群问题节选 @无名小哥 能问下今年国赛会不会指定某一款飞控呀? 答:都2021年了,你还在考虑电赛飞行器赛题备赛是否有必要用基于TI处理芯片的飞控问题? 暂不论官方是否会限定TI芯片的飞控 ...
- 2019年TI杯全国大学生电子设计竞赛总结反思与经验交流
2019年TI杯全国大学生电子设计竞赛终于尘埃落定,作为有三年电赛经验的小编来说,今年很有幸能够走完整个电赛流程(还差一步最后的全国颁奖,哈哈哈),再次特别感谢我的队友DYC.YXB还有一个学机械的外 ...
- 2019 年TI杯全国大学生电子设计竞赛H题模拟电磁曲射炮
2019 年TI杯全国大学生电子设计竞赛H题模拟电磁曲射炮 前言 首先要肯定电子设计竞赛的含金量,而也正是电子设计竞赛给了我本科阶段最好的体验.此文章介绍的作品是我所在团队于2019年参加电赛的参赛作 ...
- 2019全国计算机大赛二等奖,喜讯!这次是2019年TI杯全国大学生电子设计竞赛全国二等奖...
12月21日,2019年TI杯全国大学生电子设计竞赛福建赛区颁奖大会在福州大学举行.大会对福建赛区获得全国大学生电子设计竞赛国赛和省赛奖项的队伍进行了表彰.在今年的比赛中,信息科学与技术学院参赛队伍获 ...
- 第十一届蓝桥杯电子类国赛总结回顾
2020年11月14日,蓝桥杯电子类国赛终于结束了,准备了挺久的.决赛没考超声波和串口,有点意外,题目较为简单这也意味着今年的竞争会格外激烈了,祝愿自己能有个好成绩吧哈哈.已经大三了,这应该是我唯一一 ...
- 2019 高教社杯数模竞赛A题 高压油管的压力控制 题解
2019 高教社杯数模竞赛A题 高压油管的压力控制 题解 问题一题解 分析 求解 求解微分方程 求解管内燃油密度变化 问题二题解 分析 求解 燃油的进入 燃油的喷出 模型的求解 问题三题解 分析 求解 ...
- 教师资格证面试 计算机应用,2019下半年初中信息技术教师资格证面试真题及答案汇总...
2019下半年教师资格证面试考试在2020年1月4日-5日进行,2019下半年初中信息技术教师资格证面试真题及答案将在1月4日公布. <图层的应用(二)-制作扇形面> 1题目:制作扇研形面 ...
- 2019年TI杯 简易电路特性测试仪 制作过程(4)——程序总体分析 20/04/20
一.程序流程说明 程序中使用了嵌入式实时操作系统FreeRTOS,如果以前没有使用过嵌入式实时操作系统(RTOS)的同学,阅读或修改代码的时候可能会有点吃力.带RTOS的编程方式和传统的不带操作系统的 ...
- 2019年TI杯 简易电路特性测试仪 制作过程(2)——测量电路硬件设计 20/05/17
一.信号衰减输出部分设计 1.1增益测量时输入信号峰峰值选择 通过计算待测的共射放大电路在1kHz频率下的增益大约在100以上,这个增益会根据不同的管子呈现出细微的不同,我手头搭建的电路经过测试发现此 ...
最新文章
- javascript a 标签打开相对路径,绝对路径
- 解决linux系统CentOS下调整home和根分区大小
- Android中用 adb 命令操作数据库
- vue响应的res.data和res.data.data
- 02-MyBatis配置SQL打印
- 400. 第 N 位数字
- 简单地使用webpack进行打包,一些常见打包错误
- 双盘转子动力学仿真c语言程序,递归牛顿欧拉(正)动力学仿真
- 文件如何存储c语言,急求如何将下列C语言程序数据存储到文件中?
- stc5 采集adc值越来越小_热敏电阻温度采集简述
- Qt使用教程之指定运行设置(三)
- 如何改计算机二级照片大小,怎么修改照片大小内存,尺寸
- 学云计算能从事什么工作 云计算就业怎么样
- Wagtail Usage guide:Wagtail 使用指南
- # Okhttp解析—Interceptor详解
- matplotlib绘制多子图共享鼠标光标
- Flutter高仿微信-第52篇-群聊-清空聊天记录
- 2015-12-12 java hibernate 微信表情昵称保存
- 加速你的安卓模拟器,让开发更迅速
- 仿淘宝星级评论的实现
热门文章
- 数据大清洗_Pandas库进阶(TGI指数分析案例)(统计分析案例)
- 关于tesseract的报错解决
- EditPlus_3.4及注册码
- 106个计算机毕设程序项目,你想做好的程序都在这里面,YYSD
- c语言 字符串 timu,这个C语言题目究竟谁该背锅?竟然是它。。。
- fork、vfork函数及父进程与子进程
- UG\NX二次开发 导出x_t、导入x_t例子UF_PS_export_data、UF_PS_import_data
- Android开发资源收集
- uni-app 【JS Framework】报错当前运行的基座不包含原生插件【xxxx】,请在manifest.json中配置该插件---uniapp原生开发006
- 叠幻AR SDK介绍