发那科机器人寄存器Ar_发那科机器人数据寄存器和位置寄存器的运用介绍
FANUC数据寄存器和位置寄存器的运用
一、寄存器指令 Registers① 寄存器指令R[i] i=1~200
② 位置寄存器指令PR[i] i=1~100
③ 位置寄存器要素指令PR[i,j] i=1~100,j=1~6
其中,i表示寄存器的号码;j表示位置寄存器的要素号码;
若需要对默认寄存器数量进行扩展,可在控制启动模式中按图1所示完成设置:
(通过 PREV+NEXT+重启控制柜 进入控制启动(CTRL START)模式)
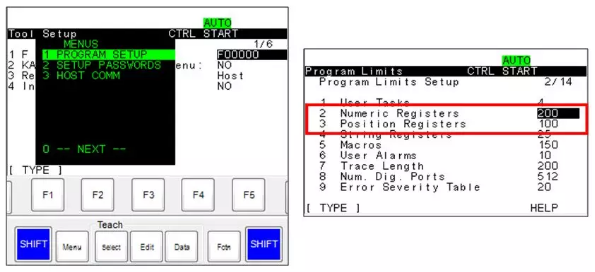
图1
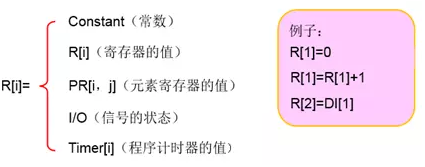
(1)数值寄存器指令R[i]
数值寄存器指令支持“=”(赋值),“+”,“-”,“*”,“/”,“MOD”,“DIV”算术运算。
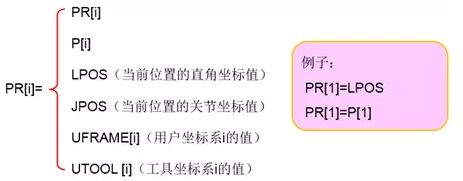
(2)位置寄存器指令PR[i]
位置寄存器指令支持“=”(赋值),“+”,“-”算术运算。
(3)位置寄存器要素指令PR[i,j]
位置寄存器要素指令支持“=”(赋值),“+”,“-”,“*”,“/”,“MOD”,“DIV”算术运算。
![]()
二、查看寄存器值(1)查看数值寄存器的值
步骤:
1)按【Data】键,再按F1【TYPE】(类型)出现以下内容(如下图2所示):
Registers:数值寄存器;
Position Reg:位置寄存器;
![]()
图2
2)移动光标选择【Registers】(数值寄存器),按【ENTER】(回车)值键,如图3所示;
![]()
图3
3)把光标移至寄存器号后,【ENTER】(回车)键,输入注释;
4)把光标移到值处,使用数字键可直接修改数值。
(2)查看位置寄存器的值
步骤:
1)按【Data】键,显示右图4;
![]()
图4
2)按F1【TYPE】(类型),出现以下内容:
Registers:数值寄存器;
Position Reg:位置寄存器;
3)移动光标选择【Position Reg】(位置寄存器),按【ENTER】(回车)键,如右图5所示;

图5
4)把光标移至寄存器号后,按【ENTER】(回车)键 ,输入注释。
5)把光标移到值处,按F4【POSITION】(位置)键,显示具体数据信息;
“ R ”表示已完成示教的位置寄存器
“ * ”表示尚未示教的位置寄存器
6)按F5【REPRE】(形式)键,如下图6所示,移动光标到所需要的项并按【ENTER】(回车)键,或通过数字键,可以切换数据形式;
• Cartesian(正交):直角坐标系
• Joint(关节):关节坐标系
![]()
图6
把光标移至数据处,可以用数字键直接修改数据。
发那科机器人寄存器Ar_发那科机器人数据寄存器和位置寄存器的运用介绍相关推荐
- 发那科机器人寄存器Ar_发那科机器人位置寄存器您了解多少!!!
1. 位置寄存器介绍 位置寄存器是用来寄存位置信息的变量,标准情况下有100个位置寄存器.位置寄存器包含2种位置数据形式(如表1所示),一类是关节坐标值,另外一类是直角坐标值. 表1 位置数据形式介绍 ...
- 发那科机器人寄存器Ar_发那科机器人与TP参数的千丝万缕关系
摘要:对于发那科机器人中的KAREL编程语言,在使用函数时可以通过形参的方式进行参数的传递,而控制机器人动作又只能通过TP程序实现,而在实际应用中会出现在不同程序间进行参数传递的需求,尤其是对于有模块 ...
- 发那科机器人寄存器Ar_发那科机器人应用-数值寄存器 R[]
数值寄存器R 数值寄存器指令 数值寄存器指令是进行寄存器的算术运算的指令.数值寄存器用来存储某一整数值或小数值得变量(有关数值寄存器, 见 7.3 节).标准情况下提供有 200 个数值寄存器. R[ ...
- 发那科机器人圆弧指令怎么用_FANUC机器人操作指南
FANUC机器人操作指南 1机器人程序 FANUC机器人程序分为TP.MACRO.CAREL几种类型. TP为一般程序,用示教器可以创建.编辑.删除. MARCO为宏程序,在设备调试完成后一般无需添加 ...
- 发那科机器人寄存器Ar_详解发那科机器人应用-数值寄存器 R「」
发那科机器人,发那科机器人集成. 数值寄存器R 数值寄存器指令数值寄存器指令是进行寄存器的算术运算的指令.数值寄存器用来存储某一整数值或小数值得变量(有关数值寄存器,见 7.3 节).标准情况下提供有 ...
- 发那科机器人网段_发那科“蜘蛛手”机器人工艺调试流程详解
FANUC iR PickTool是对传送带上的工件使用相机或光电传感器等设备进行检测,机器人配合传送带的运动对工件进行动态拾取的定制化软件.该软件提供了多台机器人共享一条传送带上工件数据信息的应用, ...
- 发那科机器人GI分配_干货 | Fanuc机器人IO配备和UI/UO配备
Fanuc机器人 IO配备和UOP配备 一.Fanuc机器人IO种类 1.Fanuc机器人IO分类 I/O (输出/输入信号),是机器人与末端执行器.外部装置等系统的外围设备展开通信的电信号.有标准化 ...
- 发那科syst178_共享:发那科机器人常规维修,故障简析全套流程
基本维修 一.阐述 定期进行机器人维修可以缩短机器人的使用寿命, FANUC机器人维修周期可以分成日常三个月,六个月,一年,三年.具体内容如下: 在这里明确叙述如何替换电池和润滑油. 二.替换电池 F ...
- 企业微信加密消息体_企业微信机器人怎么发消息?企业微信机器人可以定时发消息吗?...
企业微信外部群自带群机器人功能,可以协助员工高效管理社群,帮助我们运营客户,那么企业微信机器人怎么用呢? 使用企业微信机器人,需要管理员先进入企业微信管理后台,在[客户联系]-[效率工具]-[自动回复 ...
- delphi 企业微信消息机器人_nodeJS实现企业微信机器人每天定时发消息实例 定时任务...
nodeJS实现企业微信机器人每天定时发消息实例 背景 由于企业微信办公需要,"每天定时推送某消息用来提醒群里面所有人或者部分人",于是决定用企业微信自带的机器人来实现此功能,来代 ...
最新文章
- AI芯片初创公司单纯卖芯片还是捆绑算法的商业模式更好?...
- matlab怎么输入输出文件,[转载]底层文件输入输出函数
- 最小生成树(MST)
- CSS transition 的默认值
- C语言 | 6种常用的转换工具函数盘点
- 编程使用资源文件实现多语言页面(In Action)
- [html] 移动端布局的自适应如何做?
- Hystrix是如何工作的
- 自动网络搜索(NAS)的理解
- HTML5客户端数据存储机制Web Storage和Web SQL Database
- 人群疏散matlab程序,人群疏散方法及系统与流程
- 华为盒子EC6110-T-通刷-免拆刷机固件及教程
- 笔记本BIOS启动项中找不到新装的固态硬盘解决
- 《银行业金融机构数据治理指引》解读及解决方案建议
- tan和cot的梗_sin cos tan cot 之间的关系
- echart表格颜色设置
- python数列求和,怎样在python求和
- OPJJ“检查不考虑补货提前期”的测试1
- google map的简单应用-显示华南理工大学
- 思科网络安全 第六章考试答案