SAE J1939学习笔记(一)
1.总线布局
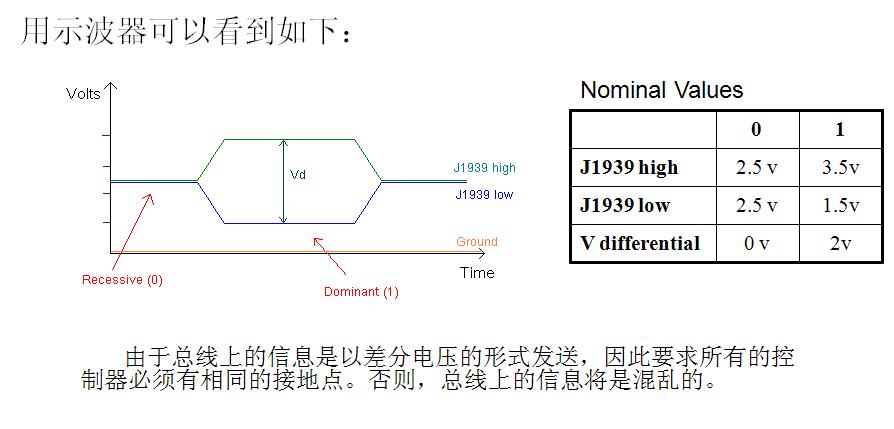
2.差分信号线
J1939 通讯传输的是一系列的“1”或“0” 。
1 代表在J1939(+)与J1939(-)之间是高电压差。
0 代表在J1939(+)与J1939(-)之间是低电压差

250K波特率时,在J1939高、低导线间的电压从0到1每秒变化250K次是可能的。用一个高频示波器可以看到此电压变化。
3.ISO标准对应
J1939/73: 应用层,故障信息。
4.术语
SPN–特定参数–特定参数对应的号码,例如:
SPN 190 = 发动机转速
SPN 513 = % 扭矩
5.CAN标准帧和扩展帧
6.协议数据单元(PDU)
7.参数组编号(PGN)
参数组编号唯一标识一个参数组,在通讯过程中起到“索引”的作用,表征报文的内容和用途,确定报文的类型和传播数据需要的帧数目。可以理解为同类(或者有共同特征的设备)参数的集合的索引。
pgn61443 – Electronic EngineController #2 – EEC2 –
Transmission Repetition Rate: 50ms ->信息发送周期
Data Length: 8 Bytes ->数据域长度(CAN扩展帧中的数据域)
Data Page: 0 ->数据页(PGN中的数据页DP)
PDU Format: 240 ->PDU格式(PDU1(<240)和PDU2(240~255))(CAN格式中的PF)
PDU Specific: 3 ->PDU特定域(PF<240,DA,240≤PF≤255,组扩展)
Default Priority: 3 ->优先级
Parameter Group Number: 61443 (00F00316) ->PGN
Bit Start Position / Byte Length SPNDescription SPN (对应的SPN号) ->数据域分布
1.1 2 bits Accelerator Pedal Low Idle Switch 558 ->1.1表示第一个字节第一位
1.3 2 bits Accelerator Pedal Kickdown Switch 559 ->2bits表示该SPN对应的数据长度
1.5 2 bits Road Speed Limit 1437
2 1 byte Accelerator Pedal Position 91
3 1 byte Percent Load at Current Speed 92
4 1 byte Remote Accelerator 974
8.特定参数号(SPN)
spn91 – Accelerator PedalPosition – The ratio of actual acceleratorpedal position to maximum pedal position. Although it is used as an input to determine transmission and ASRalgorithms about driver’s actions.
Data Length: 1 Bytes ->SPN号对应的数据的长度
Resolution: 0.4%/ bit, 0 offset ->计算方式(见下)
Data Range: 0 to100% ->数据范围(涉及偏移量计算)
Type: Measured
Suspect Parameter Number: 91 ->SPN号
Parameter Group Number: [61443] ->隶属的PGN号
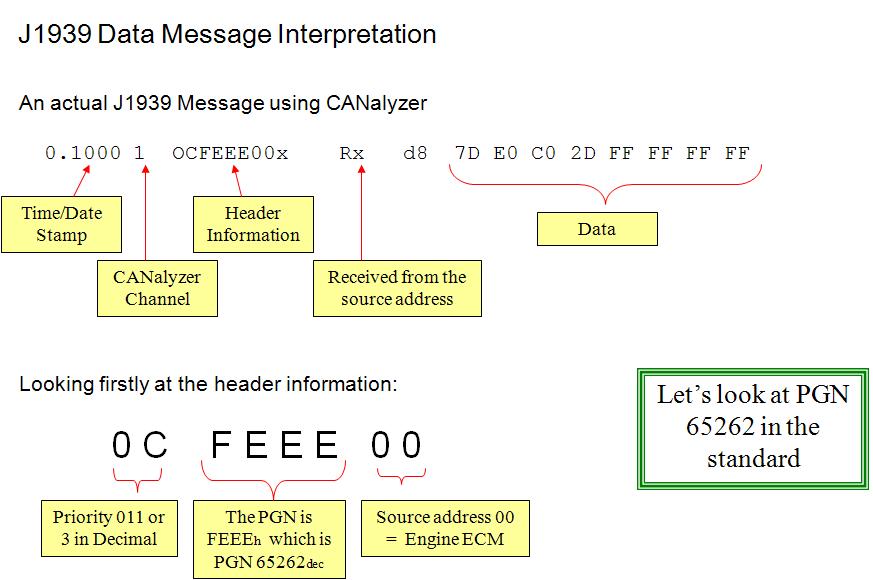
如下是一个实际的 J1939信息
0.1000 1 OCF00300x Rx d8 7DC3 C0 2D FFFFFFFF
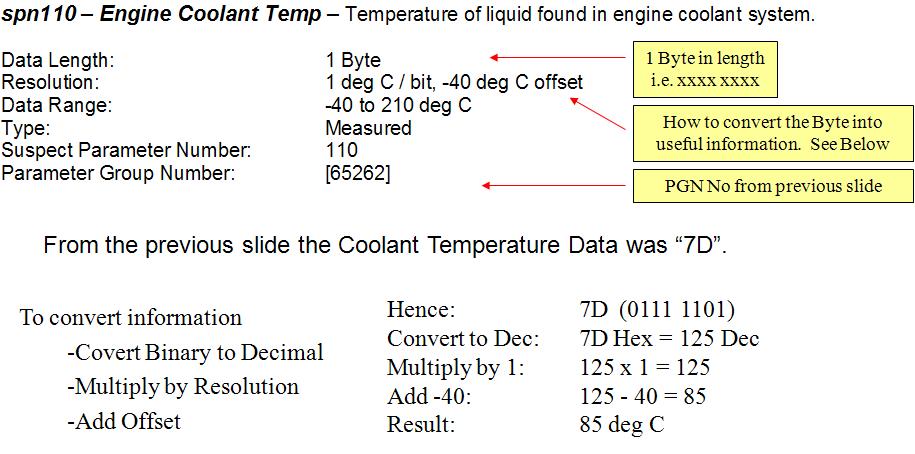
转换步骤:
十六进制转成十进制
乘以转换系数
加上偏置
举例:
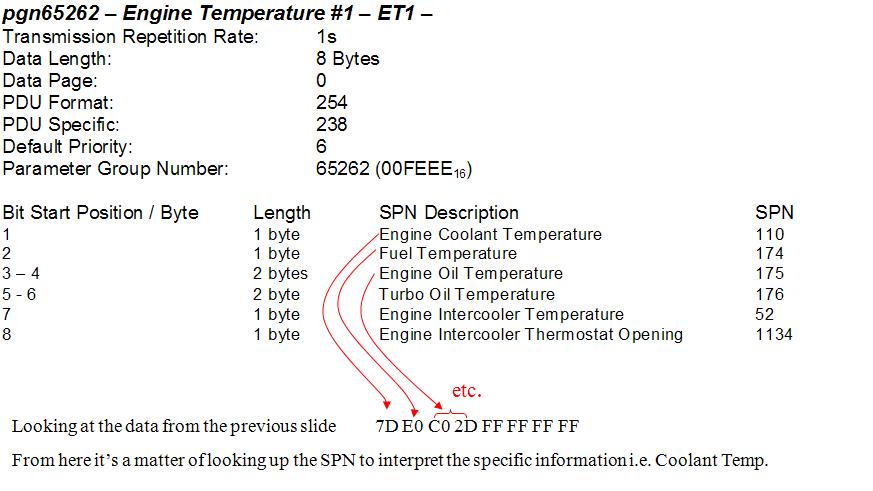
查询PGN:
SPN110如下:
SPN175:
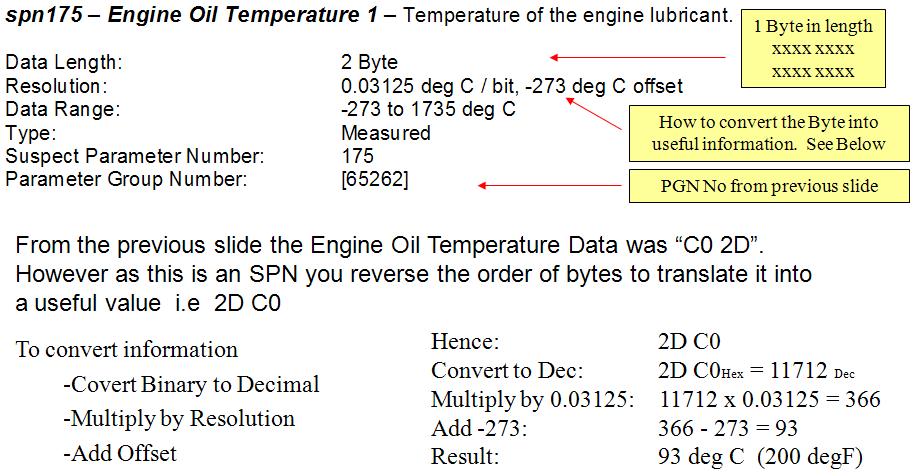
其他类同。
SAE J1939学习笔记(一)相关推荐
- SAE 1939学习笔记(三)
转自:http://blog.csdn.net/hugohut/article/details/24553043 J1939故障代码种类 J1939 由几个不同的诊断信息: –诊断信息 1 - DM1 ...
- 堆叠式自动编码器(SAE)--学习笔记
自动编码器及常见类型: 对于自编码器,往往并不关心输出是什么(因为输出就是输入的复现),只需要关心中间层的编码,或输入到编码的映射. 如果在编码和输入不同的前提下,系统仍可以复原输入,则说明编码已承载 ...
- SAE 1939学习笔记(一)
转自:http://blog.csdn.net/Hugohut/article/details/24552509 1.总线布局 2.差分信号线 J1939 通讯传输的是一系列的"1" ...
- 小猫爪:AWR294x学习笔记01-AWR294x之MCAN
小猫爪:AWR294x学习笔记01-AWR294x之MCAN 1 前言 2 MCAN简介 3 Feature描述 3.1 MCAN的工作模式 3.2 Timer Counter 3.3 ECC检测 3 ...
- 学习笔记10--CAN总线技术
本系列博客包括6个专栏,分别为:<自动驾驶技术概览>.<自动驾驶汽车平台技术基础>.<自动驾驶汽车定位技术>.<自动驾驶汽车环境感知>.<自动驾驶 ...
- 无人驾驶车辆路径规划及轨迹跟踪控制学习笔记(2)
目录 汇总 学习笔记 汇总 在关键交通场景中,轨迹规划和轨迹跟踪控制是自动驾驶车辆避免碰撞的两个关键.它不仅需要系统功能,而且需要强大的实时性. 我们集成了自动驾驶汽车的轨迹规划器和跟踪控制器,通过轨 ...
- TLD7002学习笔记(一)-芯片介绍
文章目录 1. 前言 2. TLD7002-16ES简介 3. TLD7002-16ES基本功能介绍 3.1 引脚和功能框图 3.2 状态机 3.2.1 正常工作时状态机 3.2.2 OTP烧录或者仿 ...
- CV学习笔记 | CV综述 [2020.10.01]
文章目录 0. 概述(整理完后随时修改) 1. 人工神经网络 1.1. 人工神经网络发展历程 1.2. 一些神经元节点的工作原理 1.2.1. 基本神经元 1.2.2. 卷积神经元(Convoluti ...
- 788_AUTOSAR_RS_SystemTemplate3_通信2_时序以及SAE J1939等
全部学习汇总: GitHub - GreyZhang/hack_autosar: learning autosar documents, aha, very hard! 继续学习AUTOSAR的文档, ...
- 网上某位牛人的deep learning学习笔记汇总
目录(?)[-] 作者tornadomeet 出处httpwwwcnblogscomtornadomeet 欢迎转载或分享但请务必声明文章出处 Deep learning一基础知识_1 Deep le ...
最新文章
- 【前端】layui日期控件点击一闪而过解决方法
- linux rsync
- Logistic and Softmax Regression (逻辑回归和Softmax回归)
- eclipse中maven的user settings和global settings的区别
- 【Python】洛谷 P1175_表达式的转换(逆波兰式、中缀表达式、后缀表达式、栈)
- CPU高速缓存行对齐和代码优化
- 使用 keytool 生成安卓应用程序签名
- Asp.Net 构架(HttpModule 介绍) - Part.3
- linux 查看磁盘管理,linux下的磁盘管理
- 小结Python的中文处理(转)
- 第一篇 你好,我叫Flask
- 熊猫烧香病毒源码及分析
- 推荐25个值得收藏的前端开源Awesome项目
- python与爬虫-02复杂的HTML解析
- Take Your Seat
- 【华为OD机试真题 JAVA】数字涂色
- Gartner发布2021年隐私技术成熟度曲线,数字伦理登上顶点
- php 队列取并集,php多个数组并集、交集和差集操作函数总结
- php把文字写到图片生成
- -Xdebug 启动命令详解和使用