增量式和位置式PID
先介绍几个概念,首先是比例带
比例带是一个无量纲的纯数值,其物理意义为:调节阀从全开到全关(输出做全量程范围变化时),输入(被控量)的变化占其全量程变化范围的百分数。如输入为温度,输出为阀门开度,1-100摄氏度量程,如希望温度从15——20度变化时,阀门从全开到全关,比例带为5%。
以智能车速度控制为例,控制量占空比从0-100%变化,如设定速度值为60,测量值为40则100%占空比加速,测量值为80则0占空比。即速度从80变化到40,占空比从0变化到100%,则比例带为40%。
比例带反映的是对误差的敏感程度,比例带越小,对误差越敏感。对误差越敏感,越容易引起震荡。
以下是PID的公式
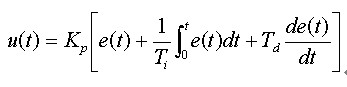
当然在单片机中,积分用求和来完成,微分用做差来完成。

其中

KP为比例带的倒数,比例带越小,KP越大,对误差越敏感。

其中T为采样时间,若10ms测速一次,则T=10ms,Ti为积分时间,积分时间约大,积分作用越弱。
Ti积分时间的物理意义为,当误差不变的情况下,积分作用达到和比例控制相同的效果所需的时间。
例如,当误差为5%时,比例控制给出100%的控制量,若不考虑比例控制,只用积分,同样是5%的误差且不变,当积分时间为5s时,也能达到100%,不过需要5s的时间。
也就是说,当误差一定时,比例控制会立刻起作用,而积分控制也能达到和比例相同的效果,但是需要经过一定时间,这个时间就是积分时间。这一点从公式中推导一样可以得到这个结论。
引入的积分的目的是消除稳态误差。一般的空调控制,只用PI即可,智能车控制则方向一般用PD,速度可用PI,也可用PID。
若使用PI控制,位置式的缺点就是积分饱和,也就是当控制量已经达到最大时,误差仍然在积分作用下继续累积,一旦误差开始反向变化,则系统需要较长时间从饱和区退出。当u(k)达到最大和最小时,需要停止积分作用,否则进入饱和时,则难以对误差的变化有快速的反应。如采用增量式则可以消除这个问题。
从位置式的公式即可推导

以智能车速度控制为例,使用增量式PI

自己确定好比例带和积分时间,测量周期,很容易就可以确定公式中的几个参数,当然需要经过大量实验来实现参数的最优化。
增量式和位置式PID相关推荐
- PID的增量式与位置式
前言 在刚接触到PID控制器的时候,我对增量式,位置式这些其实也是很懵的,然后又有什么速度环啊,位置环啊,电流环啊-巴拉巴拉一堆的,但是现在理解起来其实也就利用一些简简单单的离散数据运算出期望罢了. ...
- c语言程序位置式pid算法,增量式与位置式PID算法(C语言实现与电机控制项目)...
4.2核心代码 /************************************************************************** 函数功能:增量PI控制器 入口参 ...
- 用纯C语言分别实现增量式与位置式的PID自整定算法
对于增量式PID自整定算法,C语言代码如下: #include <stdio.h>#define SAMPLE_TIME 0.1 // 采样时间 #define KP_DEFAULT 0. ...
- 增量式and位置式PID程序实现(内含详细注释)
你好!这里是风筝的博客, 欢迎和我一起交流. 又是一年电赛时节.控制类必不可少的PID算法: 我也是从网上整理而来的: #include <stdio.h> #include <st ...
- 位置式PID与增量式PID区别浅析
1PID控制算法 什么是PID PID 控制器以各种形式使用超过了 1 世纪,广泛应用在机械设备.气动设备 和电子设备.在工业应用中PID及其衍生算法是应用最广泛的算法之一,是当之无愧的万能算法 PI ...
- 位置式PID与增量式PID区别浅析(百度百科增量式PID讲解思路概念更明确清晰)
位置式PID与增量式PID区别浅析 Z小旋 2019-04-26 08:55:12 59882 收藏 713 分类专栏: NXP智能车学习 文章标签: 位置式PID PID 增量式PID 版权 1 ...
- 位置式Pid和增量式Pid的定义及应用
PID算法是一个典型的闭环控制系统.P.I.D,比例.积分.微分. 开环:输入量对输出量没有反馈作用: 闭环:输入量对输出量有反馈作用. 位置式Pid 位置式Pid就是位置闭环控制,位置闭环控制就是根 ...
- 位置式与增量式PID
1PID控制算法-----什么是PID PID 控制器以各种形式使用超过了 1 世纪,广泛应用在机械设备.气动设备 和电子设备.在工业应用中PID及其衍生算法是应用最广泛的算法之一,是当之无愧的万能算 ...
- 位置式 PID 控制算法和增量式 PID 控制算法
数字 PID 控制算法通常分为位置式 PID 控制算法和增量式 PID 控制算法 一.位置式 PID 算法 : e(k): 用户设定的值(目标值) - 控制对象的当前的状态值 比例P : e(k)积分 ...
最新文章
- IOS开发UISearchBar失去第一响应者身份后,取消按钮不执行点击事件的问题
- 用python画玫瑰花教程-利用Python的turtle库绘制玫瑰教程
- Java学习小程序(6)随机加法运算器
- opencv_python关于Qt的错误
- Educational Codeforces Round 114 (Rated for Div. 2) D. The Strongest Build 暴力 + bfs
- 前端学习(3315):UI提取
- Scrapy - Request 和 Response(请求和响应)
- java实践SPI机制及浅析源码
- TSC条码打印机C#例程(tsclib.dll调用)
- 9--Rails数据交互1
- CQOI2015 解题报告
- 蒙特卡洛法与BS模型法分别实现欧式期权定价
- 纯CSS制作-旋转立方体效果
- 2010新财富中国富豪榜1至100名
- 江苏小高考计算机知识点,江苏文科小高考哪几门 考试内容是什么
- 李永辉:IBM大数据产品及实践路线图
- 博瑞智能云音箱云喇叭API开发定时播报文档(2023-4-5)
- 打开对方CMD的三种方法
- 微信支付一 :公众号支付1
- live writer实用插件合集