图像特征提取(二)——HOG特征
HOG特征
1、简介:
HOG特征最早出现在2005年CVPR上,法国的研究人员Navneet Dalal 和Bill Triggs利用HOG特征+SVM进行行人检测,在当时得到了了较好的检测效果,OpenCV还把HOG特征提取集成成了API。
HOG特征原文链接:https://hal.inria.fr/file/index/docid/548512/filename/hog_cvpr2005.pdf
2、HOG特征:
方向梯度直方图(Histogram of Oriented Gradient, HOG)特征是通过计算和统计图像局部区域的梯度方向直方图形成的一种特征描述子,可以用于计算机视觉领域,如目标检测、目标跟踪等。
2.1 核心思想:
对于一幅图像中的目标,局部目标的表象和形状(appearance and shape)可以用其局部梯度方向和梯度强度分布特性很好的描述(和边缘方向直方图(Edge Direction Histogram )很类似)。首先将整幅图像分成小的连通区域(称为细胞单元cells);然后通过采集细胞单元中各像素点的梯度的或边缘的方向直方图;最后把这些直方图组合起来就可以构成特征描述器。
2.2 提高性能的方法:
把这些局部直方图在图像的更大的范围内(我们把它叫区间或block)进行对比度归一化(contrast-normalized),所采用的方法是:先计算各直方图在这个区间(block)中的密度,然后根据这个密度对区间中的各个细胞单元做归一化。通过这个归一化后,能对光照变化和阴影获得更好的效果。
2.3 优缺点:
与其他的特征描述方法相比,HOG特征具有一定的优势。由于HOG是在图像的局部方格单元上操作,以及在粗的空域抽样、精细的方向抽样以及较强的局部光学归一化等条件下,所以它对图像几何的和光学的形变这种全局性形变能保持较好的不变性,像目标运动模糊、光照变化及颜色变化等HOG特征都鲁棒。相反,由于HOG特征是一种目标局部描述特征,对于局部目标形变较大的目标,显然效果会很差。(将其和颜色特征相融合,能够在一定程度上弥补形变对目标描述的影响)
3、HOG特征提取的实现步骤:
HOG特征检测算法的几个步骤:颜色空间归一化—>梯度计算—>梯度方向直方图—>重叠块直方图归一化—>HOG特征。
3.1 大致流程:
HOG特征提取方法就是将一个image(你要检测的目标或者扫描窗口):
1)灰度化(三维图像→一维图像,灰度图像基本不会消除图像的边缘梯度信息);
2)采用Gamma校正法对输入图像进行颜色空间的标准化(归一化);目的是调节图像的对比度,降低图像局部的阴影和光照变化所造成的影响,同时可以抑制噪音的干扰;
3)计算图像每个像素的梯度(包括大小和方向);主要是为了捕获轮廓信息,同时进一步弱化光照的干扰。
4)将图像划分成小cells(例如2*2、4*4、6*6像素/cell等);
5)统计每个cell的梯度直方图(不同梯度的个数),即可形成每个cell的descriptor;
6)将每几个cell组成一个block(例如2*2个cell/block),一个block内所有cell的特征descriptor串联起来便得到该block的HOG特征descriptor。
7)将图像image内的所有block的HOG特征descriptor串联起来就可以得到该image(要检测的目标)的HOG特征descriptor了。这个就是最终的可供分类使用的特征向量了
3.2 详细过程:
(1)标准化gamma空间和颜色空间
为了减少光照因素的影响,首先需要将整个图像进行规范化(归一化)。在图像的纹理强度中,局部的表层曝光贡献的比重较大,所以,这种压缩处理能够有效地降低图像局部的阴影和光照变化。因为颜色信息作用不大,通常先转化为灰度图;
Gamma压缩公式:
 比如可以取Gamma=1/2;
比如可以取Gamma=1/2;
(2)计算图像梯度
计算图像横坐标和纵坐标方向的梯度,并据此计算每个像素位置的梯度方向值;求导操作不仅能够捕获轮廓,人影和一些纹理信息,还能进一步弱化光照的影响。
图像中像素点(x,y)的梯度为:
![]()
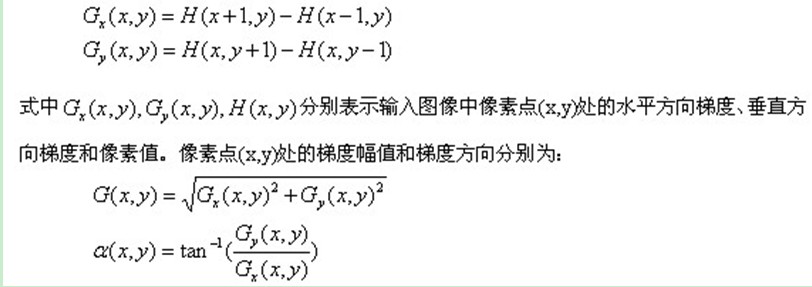
最常用的方法是:首先用[-1,0,1]梯度算子对原图像做卷积运算,得到x方向(水平方向,以向右为正方向)的梯度分量gradscalx,然后用[1,0,-1]T梯度算子对原图像做卷积运算,得到y方向(竖直方向,以向上为正方向)的梯度分量gradscaly。然后再用以上公式计算该像素点的梯度大小和方向。
(3)为每个细胞单元构建梯度方向直方图
第三步的目的是为局部图像区域提供一个编码,同时能够保持对图像中人体对象的姿势和外观的弱敏感性。
将图像分成若干个“单元格cell”,例如每个cell为6*6个像素。假设我们采用9个bin的直方图来统计这6*6个像素的梯度信息。也就是将cell的梯度方向360度分成9个方向块,如图所示:例如:如果这个像素的梯度方向是20-40度,直方图第2个bin的计数就加一,这样,对cell内每个像素用梯度方向在直方图中进行加权投影(映射到固定的角度范围),就可以得到这个cell的梯度方向直方图了,就是该cell对应的9维特征向量(因为有9个bin)。
像素梯度方向用到了,那么梯度大小呢?梯度大小就是作为投影的权值的。例如说:这个像素的梯度方向是20-40度,然后它的梯度大小是2(假设啊),那么直方图第2个bin的计数就不是加一了,而是加二(假设啊)。

细胞单元可以是矩形的(rectangular),也可以是星形的(radial)。
(4)把细胞单元组合成大的块(block),块内归一化梯度直方图
由于局部光照的变化以及前景-背景对比度的变化,使得梯度强度的变化范围非常大。这就需要对梯度强度做归一化。归一化能够进一步地对光照、阴影和边缘进行压缩。
作者采取的办法是:把各个细胞单元组合成大的、空间上连通的区间(blocks)。这样,一个block内所有cell的特征向量串联起来便得到该block的HOG特征。这些区间是互有重叠的,这就意味着:每一个单元格的特征会以不同的结果多次出现在最后的特征向量中。我们将归一化之后的块描述符(向量)就称之为HOG描述符。

区间有两个主要的几何形状——矩形区间(R-HOG)和环形区间(C-HOG)。R-HOG区间大体上是一些方形的格子,它可以有三个参数来表征:每个区间中细胞单元的数目、每个细胞单元中像素点的数目、每个细胞的直方图通道数目。
例如:行人检测的最佳参数设置是:3×3细胞/区间、6×6像素/细胞、9个直方图通道。则一块的特征数为:3*3*9;
- 通常归一化有以下几种方式:
![]()
(5)收集HOG特征
最后一步就是将检测窗口中所有重叠的块进行HOG特征的收集,并将它们结合成最终的特征向量供分类使用。
3.3 如何计算一个图像的HOG特征维数呢?
Dalal提出的Hog特征提取的过程:把样本图像分割为若干个像素的单元(cell),把梯度方向平均划分为9个区间(bin),在每个单元里面对所有像素的梯度方向在各个方向区间进行直方图统计,得到一个9维的特征向量,每相邻的4个单元构成一个块(block),把一个块内的特征向量联起来得到36维的特征向量,用块对样本图像进行扫描,扫描步长为一个单元。最后将所有块的特征串联起来,就得到了人体的特征。例如,对于64*128的图像而言,每16*16的像素组成一个cell,每2*2个cell组成一个块,因为每个cell有9个特征,所以每个块内有4*9=36个特征,以8个像素为步长,那么,水平方向将有7个扫描窗口,垂直方向将有15个扫描窗口。也就是说,64*128的图片,总共有36*7*15=3780个特征。
参考资料:https://hal.inria.fr/file/index/docid/548512/filename/hog_cvpr2005.pdf
博客:
- https://www.cnblogs.com/wyuzl/p/6792216.html
- https://blog.csdn.net/hujingshuang/article/details/47337707
- https://blog.csdn.net/zouxy09/article/details/7929348
图像特征提取(二)——HOG特征相关推荐
- Python人脸图像特征提取(HOG、Dlib、CNN方法)
Python人脸图像特征提取(HOG.Dlib.CNN方法) 一.HOG人脸图像特征提取 1.HOG特征: 1) 主要思想: 2) 实现方法: 3) 性能提高: 4) 优点 2.HOG特征提取算法的实 ...
- 图像特征提取算法—HOG
图像特征提取算法-HOG 一 图像基本概念 1.1特征 边缘,角,区域.但不同的目的对应着的不同的特征,边缘特征,颜色特征,梯度方向分布等. 每个物体,我们总可以用一些词语或部件来描述它,比如人脸的特 ...
- 目标检测(三)传统目标检测与识别的特征提取——基于HOG特征的目标检测原理
目录 简介 提取HOG特征的步骤 1.预处理获取要计算其特征的输入图像 2.计算图像的梯度 3.计算8×8细胞梯度直方图 4.直方图归一化 5.计算HOG特征向量 Opencv利用HOG特征实现行人检 ...
- 【特征提取】Hog特征原理简介与代码实践
前言 在[模式识别]SVM实现人脸表情分类一文中,我曾使用Hog特征+SVM的方式实现表情分类,但对于Hog特征的原理并未做深入整理.此篇将结合scikit-image来简单分析Hog特征的原理和维度 ...
- 【机器学习】(十七)非负矩阵分解NMF:人脸图像特征提取、用特征排序;还原混合信号
非负矩阵分解(NMF)是一种无监督学习算法,目的在于提取有用的特征(可以识别出组合成数据的原始分量),也可以用于降维,通常不用于对数据进行重建或者编码. 与PCA相同,NMF将每个数据点写成一些分量的 ...
- 提取lbp特征java代码_目标检测的图像特征提取之_LBP特征
LBP(Local Binary Pattern,局部二值模式)是一种用来描述图像局部纹理特征的算子:它具有旋转不变性和灰度不变性等显著的优点.它是首先由T. Ojala, M.Pietikäinen ...
- 图像特征提取(纹理特征)
图像纹理特征总体简述 纹理是一种反映图像中同质现象的视觉特征,它体现了物体表面的具有缓慢变化或者周期性变化的表面结构组织排列属性 纹理具有三大标志: 某种局部序列性不断重复 非随机排列 纹理区域内大致 ...
- 图像特征提取之LoG特征
对于做模式识别来说,特征的提取是最为关键的一个步骤.想了想,结合自己的开发经历,就写写各个算子. 首先是LOG特征. 1.图像的一阶导数 对于连续的情况,其微分表达式为: 对于离散的情况: 2.图像的 ...
- 图像特征提取之Haar特征_人脸识别
1.Haar-like特征 Haar-like特征最早是由Papageorgiou等应用于人脸表示,Viola和Jones在此基础上,使用3种类型4种形式的特征. Haar特征分为三类:边缘特征.线性 ...
- OpenCV + CPP 系列(卅九)图像特征提取(Haar特征)
文章目录 Haar特征介绍(Haar Like Features) Haar特征介绍(Haar Like Features) Haar特征是一种反映图像的灰度变化的,像素分模块求差值的一种特征.它分为 ...
最新文章
- P4588 [TJOI2018]数学计算(线段树维护区间乘和单点修改)
- matlab axes标题,Matlab 坐标轴(axes),数据提示(data cursor),标题(title)等的默认字体问题...
- 开发日记-20190825 关键词 管道和FIFO
- 成功解决ValueError: column index (256) not an int in range(256)
- python--列表与字典
- LeetCode 1563. 石子游戏 V(DP)
- 抽象方法可以有方法体_什么方法可以祛斑?祛斑的方法有哪些?
- 基于pyQt的按键响应程序,实现按下按键进行图片曝光(按下按钮,运行另一个曝光图片程序.py)
- bootstrap table无法服务器分页_layui分页的大坑,RequestPayload和FormData
- 从头搭建drbd+openfiler+corosync (二)
- linux安装bash工具包,Linux 资源监视工具BashTop的安装和使用
- 5分钟学会使用DataHub接入实时数据到MaxCompute(原ODPS)
- linux mint自动登录,Linux Mint 19.2新功能/新特性介绍,包含Cinnamon、MATE、Xfce版本
- 三津谈保险系统建设(一): 现状分析和建设目标规划
- JavaScript基础知识
- 四招搞定托业(TOEIC)英语阅读
- 不积跬步无以至千里,不积小流无以成江海
- 【读书笔记】Peano公理(为什么“数学归纳法”是正确的?为什么“数学归纳法”可以那么用?)
- 【DeeplabV3+ get_miou_png】DeeplabV3+获取数据集预测结果灰度图
- druid连接池监控