在ROS中使用奥比中光Orbbec Astra Pro深度相机(二)
在之前外面已经介绍过Orbbec Astra Pro深度相机,同学们可以点击☞☞☞了解详情,接着再来介绍介绍。
有兴趣的可以看一下ROS Wiki上的介绍:
Orbbec Astra Pro介绍
astra_camera包介绍
astra_launch包介绍
功能包下载地址,可以直接用步骤里的git clone
发现一篇好文:https://www.ncnynl.com/archives/201703/1444.html
1)
安装ROS
若已安装请忽略
2)
安装依赖:
$ sudo apt install ros-*-rgbd-launch ros-*-libuvc ros-*-libuvc-camera ros-*-libuvc-ros
或者
$ sudo apt install ros-$ROS_DISTRO-rgbd-launch ros-$ROS_DISTRO-libuvc ros-$ROS_DISTRO-libuvc-camera ros-$ROS_DISTRO-libuvc-ros
3)
创建工作空间,然后运行ROS的工作空间初始化命令即可完成创建过程:
$ mkdir -p ~/catkin_camera/src
$ cd ~/catkin_camera/src
$ catkin_init_workspace
4)
配置工作空间的环境变量
$ cd catkin_camera
$ source devel/setup.bash
(使用zsh终端的直接吧bash换成zsh就可以了,下同)
如果这样设置环境变量,那么这个环境变量只对于此个终端有效,再打开一个终端是还需要再设置一下环境变量才行
我们可以直接在终端的配置文件中加入环境变量的设置:
$ echo"source/catkin_lidar/devel/setup.bash">>~/.bashrc
这样的话对打开的终端设置的环境变量都有效
之前设置过环境变量的可以用下面这个命令修改
gedit ~/.bashrc
打开之后添加或修改成:

为了确保环境变量已经生效,可以使用如下命令进行检查:echo $ROS_PACKAGE_PATH
如果打印的路径中已经包含当前工作空间的路径,则说明环境变量设置成功

5)
下载功能包
$ cd catkin_camera/src
$ git clone https://github.com/orbbec/ros_astra_camera
6)
创建Astra udev rule
$ roscd astra_camera
$ ./scripts/create_udev_rules
7)
在工作空间编译相机
$ cd ~/catkin_camera
$ catkin_make --pkg astra_camera
启用过滤器(不推荐:建议首先尝试主分支)
astra驱动程序提供了正常的和过滤的方法。使用filter driver,我们可以获得更精确的深度数据,但这会消耗更多的计算资源。如果程序将在嵌入式系统上执行,我们建议使用常规方法。
我们可以使用 -DFILTER=ON / OFF去开启关闭用下面这个命令:
$ catkin_make --pkg astra_camera -DFILTER=OFF
8)
下面进入正式的使用示例,大家可以感受一下这个相机
首先打开一个新终端,运行roscore把ros master请出来,
然后再打开新的终端进行操作:
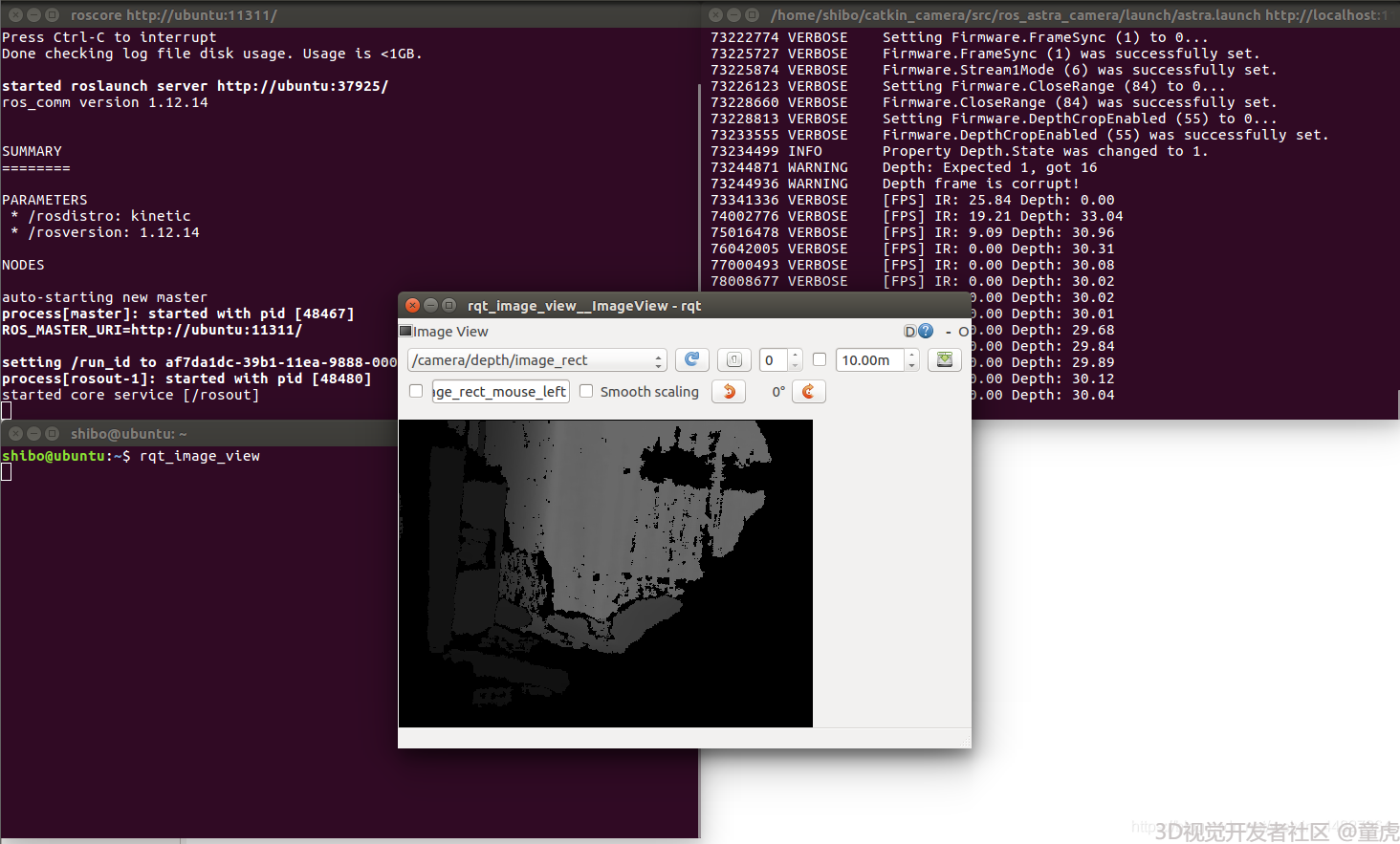
①使用Astra
$ roslaunch astra_camera astra.launch
②使用Astra Stereo S (w/ UVC)
$ roslaunch astra_camera stereo_s.launch
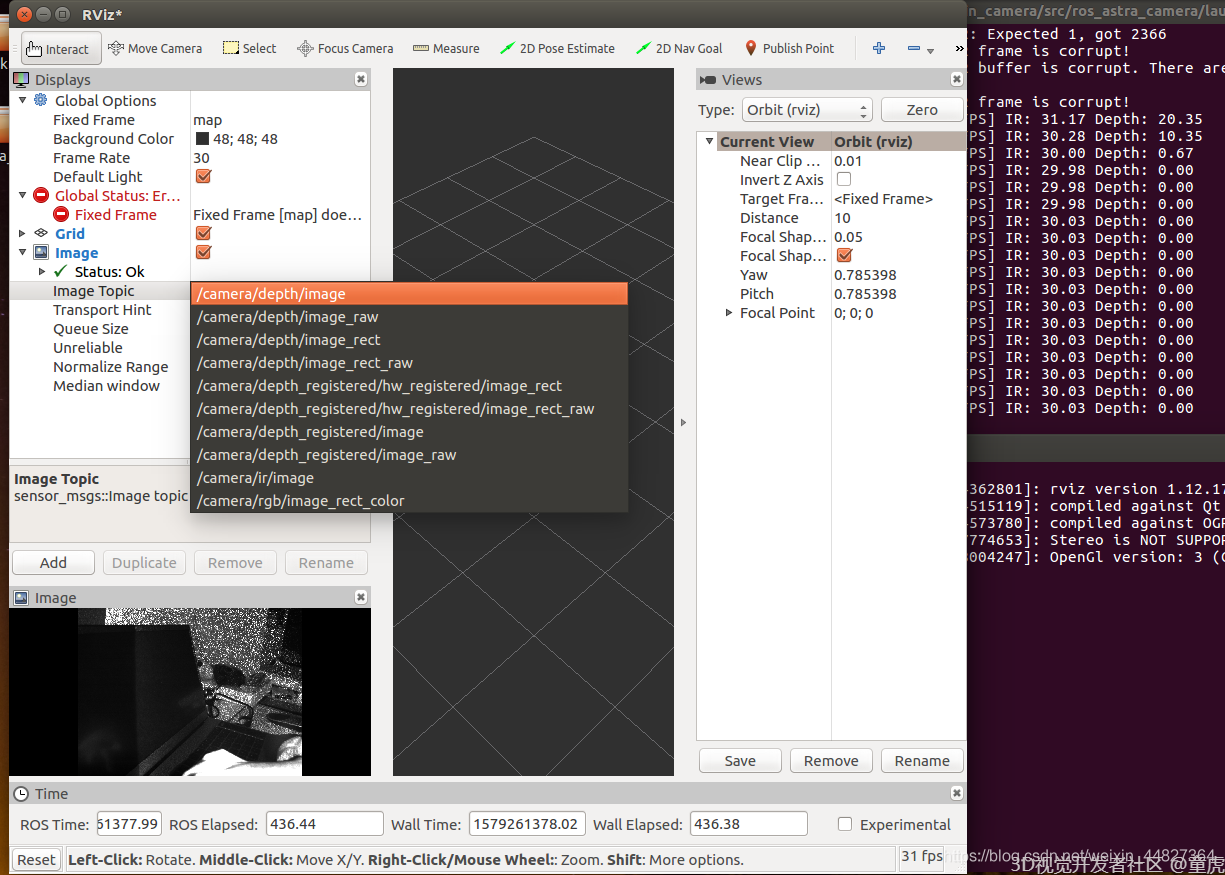
这个命令后就可以使用rviz和image_view了
在终端输入:rviz
订阅相机的图像话题就可以看到图像了
3D视觉开发者社区是由奥比中光给所有开发者打造的分享与交流平台,旨在将3D视觉技术开放给开发者。平台为开发者提供3D视觉领域免费课程、奥比中光独家资源与专业技术支持。
加入【3D视觉开发者社区】学习行业前沿知识,赋能开发者技能提升!
加入【3D视觉AI开放平台】体验AI算法能力,助力开发者视觉算法落地!
往期推荐:
1、开发者社区「运营官」招募启动啦!_奥比中光3D视觉开发者社区的博客-CSDN博客
2、 最新综述:基于深度学习方式的单目物体姿态估计与跟踪_奥比中光3D视觉开发者社区的博客-CSDN博客
3、为什么你的手机后置摄像头越来越丑?ECCV2022这篇论文告诉你_奥比中光3D视觉开发者社区的博客-CSDN博客
在ROS中使用奥比中光Orbbec Astra Pro深度相机(二)相关推荐
- 在ROS中使用奥比中光Orbbec Astra Pro
一.相机驱动的安装 1.安装依赖: $ sudo apt-get install build-essential freeglut3 freeglut3-dev 2.检查udev版本,需要libude ...
- 奥比中光Orbbec Astra pro 深度相机在ROS Melodic的使用
一.虚拟机中使用OPENNI显示相机图像 下载openni的linux安装包.下载地址 https://dl.orbbec3d.com/dist/openni2/OpenNI_2.3.0.66.zip ...
- 奥比中光Orbbec Astra Pro体感摄像头“标定全过程”
1.前期准备工作 在ROS中配置奥比中光Orbbec Astra Pro,保证可以正常显示RGB.深度.IR.彩色图像. 2.安装标定功能包 终端中输入命令 sudo apt install ros- ...
- 在ROS使用奥比中光Orbbec Astra Pro
一.相机驱动的安装 1.安装依赖 $ sudo apt-get install build-essential freeglut3 freeglut3-dev 2.检查udev版本,需要libudev ...
- 奥比中光深度摄像头_ros与深度相机入门教程-在ROS使用奥比中光Orbbec Astra Pro
ros与深度相机入门教程-在ROS使用奥比中光Orbbec Astra Pro 说明: 介绍如何在ros安装和使用奥比中光Orbbec Astra Pro OrbbecAstra介绍 astra_ca ...
- 使用奥比中光Orbbec Astra Pro在ROS下跑orb_slam2
使用奥比中光Orbbec Astra Pro在ROS下跑orb_slam2 一.奥比中光摄像头驱动 1. Install ROS 1) Create a ROS Workspace(if you do ...
- 最全“乐视三合一奥比中光Orbbec Astra Pro体感摄像头”标定全过程(1)
1.前期准备工作 在ROS中配置乐视三合一奥比中光Orbbec Astra Pro,保证可以正常显示RGB.深度.IR.彩色图像. 2.安装标定功能包 终端中输入命令 sudo apt install ...
- 全网最详细 Opencv + OpenNi + 奥比中光(Orbbec) Astra Pro /乐视三合一体感摄像头LeTMC-520 + linux 环境搭建
本文参考 Using Orbbec Astra 3D cameras C++20学习:基于Ubuntu系统编译gcc10.2.0 linux下编译安装opencv生成opencv.pc 摄像头方案 / ...
- 奥比中光Orbbec Astra Pro RGBD 3D视觉传感器在ROS(indigo和kinetic)使用说明 rgb depth同时显示
Orbbec Astra Pro传感器在ROS(indigo和kinetic)使用说明 rgb depth同时显示 这款摄像头使用uvc输入彩色信息,需要libuvc和libuvc_ros这样才能在R ...
最新文章
- 数据结构与算法(7-1)图的存储(邻接矩阵、邻接表)
- apache camel 的 split 和 aggregate
- PaddleOCR加载chinese_ocr_db_crnn_modile模型进行中英文混合预测(Http服务)实践
- jsoup HTML parser hello world examples--转
- python小游戏编程100例_经典编程100例——python版(例9例10)
- 算法优化:最大m个子段和,问题规模从1个子段和扩展到m个,动态规划
- Python之io概念
- Tomcat源码分析(九)--Session管理
- 论计算机专业毕业生的人文素养
- Omni Recover适用于哪些IOS数据恢复方案?
- 最全iOS数据存储方法介绍:FMDB,SQLite3 ,Core Data,Plist,Preference偏好设置,NSKeyedArchiver归档...
- 腾讯云学生服务器9元/月
- 计算机考研复试-《数据库》篇
- 可汗学院公开课——统计学学习:47-61
- 记测试双十一秒杀活动的坎坷历程
- dns欺骗及wincap开发问题总结
- 电子邮件注册网站哪个好:四大邮箱客户端的对比
- 【JAVA】一种寻找错误的方法
- 微信JS-SDK实现自定义分享功能,分享给朋友,分享到朋友圈
- MySQL 8.0如何配置my.cnf
热门文章
- .com域名再次涨价
- 嵌入式linux下应用程序,嵌入式Linux应用程序开发详解(完整下载)
- SQL学习笔记_Aliyun4
- 钢铁行业经销商管理系统 实现企业数字化经销商管理
- 英语谚语精选1000句
- vue 报错Invalid prop: type check failed for prop “span“. Expected Number, with value 2, got String wit
- 合肥工业大学计算机考研录报比,2019合肥工业大学计算机考研初试科目、参考书目、报录比汇总...
- 给定一个二叉树, 找到该树中两个指定节点的最近公共祖先
- moment.js根据身份证判断是否成年
- Android 65K问题之65K来源探究