3D集合图元:最小边界框/包围盒(boundingbox)
对于2D边界框的应用时比较广泛地,它为一个简单匹配建立了很小的计算规则,3D模型的boundingbox则比较困难,计算代价较大。对于PCL库的使用则降低了计算难度,三维数值化降低了建模过程,可以使用简单的边界框规则。
对于 如何获取最大最小值过程:在载入时去 进行一个 简单 一次交换排序,选取最小最大值... 计算边界框.
引自天行健,君子以自强不息的 文章;
原文链接:http://www.cppblog.com/lovedday/archive/2008/02/23/43122.html
矩形边界框 / 包围盒
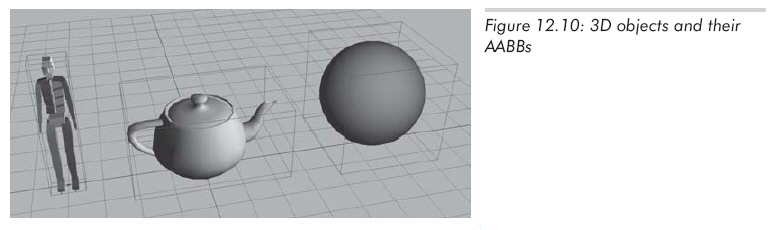
另一种常见的用来界定物体的几何图元是矩形边界框,矩形边界框可以是与轴对齐的或是任意方向的。轴对齐矩形边界框有一个限制,就是它的边必须垂直于坐标轴。缩写AABB常用来表示axially aligned bounding box(轴对齐矩形边界框),OBB用来表示oriented bounding box(方向矩形边界框)。轴对齐矩形边界框不仅容易创建,而且易于使用。
一个3D的AABB就是一个简单的六面体,每一边都平行于一个坐标平面。矩形边界框不一定是立方体,它的长、宽、高可以彼此不同。在图12.10中,画出了一些简单的3D物体和它们的AABB。
AABB的表达方法
先介绍AABB的一些重要性质和引用这些值时所用到的记法。AABB内的点满足下列等式:
xmin ≤ x ≤ xmax
ymin ≤ y ≤ ymax
zmin ≤ z ≤ zmax
特别重要的两个点为:
pmin = [xmin ymin zmin]
pmax = [xmax ymax zmax]
中心点c为:
c = (pmin + pmax) /2
"尺寸向量"s是从pmin指向pmax的向量,包含了矩形边界的长、宽、高:
s = pmax - pmin
还可以求出矩形边界框的"半径向量"r,它是从中心指向pmax的向量:
r = pmax - c = s/2
明确地定义一个AABB只需要pmin、pmax、c、s、r这5个向量中的两个(除s和r不能配对外,它们中的任意两个都可配对)。在一些情况下,某些配对形式比其他的会更有用。我们建议用pmin和pmax表示一个边界框,因为实际应用中,使用它们的频率远高于c、s、r。当然,由pmin和pmax计算其余三个中的任意一个都是很容易的。
在我们的C++代码中,使用下面的类表示AABB,这是一个缩略的代码清单。
#ifndef AABB3_H
#define AABB3_H
#include "vector3.h"
class cMatrix4x3;//---------------------------------------------------------------------------// Implement a 3D axially aligned bounding box//---------------------------------------------------------------------------class cAABB3{public:cVector3 min, max;public:// query for dimentionscVector3 size() const { return max - min; }float x_size() { return max.x - min.x; }float y_size() { return max.y - min.y; }float z_size() { return max.z - min.z; }cVector3 center() const { return (min + max) * 0.5f; }// fetch one of the eight corner pointscVector3 corner(int i) const;// "Empty" the box, by setting the values to really large/small numbers.void empty();// add a point to the boxvoid add(const cVector3& p);// add an AABB to the boxvoid add(const cAABB3& box);// return true if the box is emptybool is_empty() const;// return true if the box contains a pointbool contains(const cVector3& p) const;// transform the box and compute the new AABBvoid set_to_transformed_box(const cAABB3& box, const cMatrix4x3& m);// return the clostet point on this box to another pointcVector3 clostet_point_to(const cVector3& p) const;};#endif计算AABB
计算一个顶点集合的AABB是非常简单的,先将最小值和最大值设为"正负无穷大"或任何比实际中用到的数都大或小得多的数。接着,遍历全部点,并扩展边界框直到它包含所有点为止。
我们在cAABB类中引入了两个辅助函数,第一个函数负责"清空"AABB
//---------------------------------------------------------------------------// "Empty" the box, by setting the values to really large/small numbers.//---------------------------------------------------------------------------void cAABB3::empty() {const float big_number = 1e37f;min.x = min.y = min.z = big_number;max.x = max.y = max.z = -big_number;}第二个函数将单个点" 加"到AABB中,并在必要的时候扩展AABB 以包含每个点:
//---------------------------------------------------------------------------// Add a point to the box//---------------------------------------------------------------------------void cAABB3::add(const cVector3& p){// expand the box as necessary to contain the pointif(p.x < min.x) min.x = p.x;if(p.x > max.x) max.x = p.x;if(p.y < min.y) min.y = p.y;if(p.y > max.y) max.y = p.y;if(p.z < min.z) min.z = p.z;if(p.z > max.z) max.z = p.z;}现在,从一个点集创建矩形边界框,可以使用下面的代码:
Listing 12.1: Computing the AABB for a set of points// Our list of pointsconst int n;Vector3 list[n];// First, empty the boxAABB3 box;box.empty();// Add each point into the boxfor (int i = 0 ; i < n ; ++i) box.add(list[i]);取得AABB的顶点://--------------------------------------------------------------------------------------// Return one of the 8 corner points. The points are numbered as follows://// 6 7// ------------------------------// /| /|// / | / |// / | / |// / | / |// / | / |// / | / |// / | / |// / | / |// / | / |// 2 / | 3 / |// /----------------------------/ |// | | | |// | | | | +Y// | 4 | | | // | |-----------------|----------| |// | / | / 5 |// | / | / | +Z// | / | / |// | / | / | /// | / | / | /// | / | / | /// | / | / | /// | / | / | /// | / | / |/// |/ |/ ----------------- +X// ------------------------------// 0 1//// Bit 0 selects min.x vs. max.x// Bit 1 selects min.y vs. max.y// Bit 2 selects min.z vs. max.z//--------------------------------------------------------------------------------------cVector3 cAABB3::corner(int i) const{assert(i >= 0 && i <= 7); // make sure index is in rangereturn cVector3((i & 1) ? max.x : min.x,(i & 2) ? max.y : min.y,(i & 4) ? max.z : min.z);}其他的相关函数,具体功能详见注释:
//---------------------------------------------------------------------------// Add an AABB to the box//---------------------------------------------------------------------------void cAABB3::add(const cAABB3& box){// expand the box as necessaryif(box.min.x < min.x) min.x = box.min.x;if(box.min.x > max.x) max.x = box.min.x;if(box.min.y < min.y) min.y = box.min.y;if(box.min.y > max.y) max.y = box.min.y;if(box.min.z < min.z) min.z = box.min.z;if(box.min.z > max.z) max.z = box.min.z;}//---------------------------------------------------------------------------// Return true if the box is empty//---------------------------------------------------------------------------bool cAABB3::is_empty() const{// check if we're inverted on any axisreturn (min.x > max.x) || (min.y > max.y) || (min.z > max.z);}//---------------------------------------------------------------------------// Return true if the box contains a point//---------------------------------------------------------------------------bool cAABB3::contains(const cVector3& p) const{// check for overlap on each axisreturn (p.x >= min.x) && (p.x <= max.x) &&(p.y >= min.y) && (p.y <= max.y) &&(p.z >= min.z) && (p.z <= max.z);}//---------------------------------------------------------------------------// return the closest point on this box to another point//---------------------------------------------------------------------------cVector3 cAABB3::clostet_point_to(const cVector3& p) const{// "push" p into the box, on each dimension.cVector3 r;if(p.x < min.x)r.x = min.x;else if(p.x > max.x)r.x = max.x;elser.x = p.x;if(p.y < min.y) r.y = min.y;else if(p.y > max.y) r.y = max.y;elser.y = p.y;if(p.z < min.z)r.z = min.z;else if(p.z > max.z)r.z = max.z;elser.z = p.z;return r;}AABB与边界球
很多情况下,AABB比边界球更适合于做定界球:
(1)计算一个点集的AABB,在编程上更容易实现,并能在较短的时间内完成。计算边界球则困难得多。
(2)对实际世界里的许多物体,AABB提供了一种"更紧凑"的边界。当然,对于某些物体,边界球更好(设想一个本身就是球形的物体)。在极端情况下,AABB的体积可能仅相当于边界球体积的1/2,大部分时候边界球的体积会比矩形框的体积大得多,比较一下电线杆的边界球和AABB就知道了。图12.11所示为不同物体的AABB与边界球的比较。
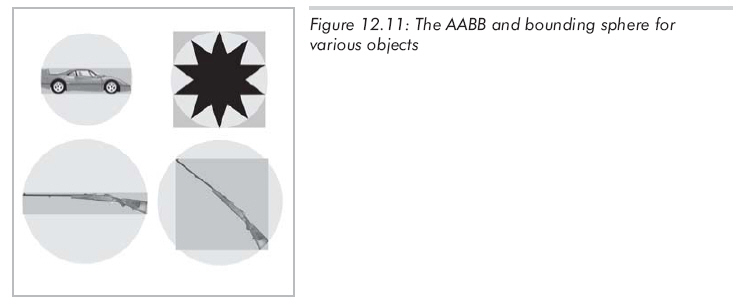
边界球的根本问题是它的形状只有一个自由度----半径,而AABB却有三个自由度----长、宽、高。因此,它可以调节这些自由度以适应不同物体。对图12.11中的大部分物体,除了右上角的星形体外,AABB都比边界球小。对这颗星,边界球也仅比AABB略小一些。通过图12.11,我们可以注意到AABB对物体的方向很敏感。比较下面两支枪的AABB,图中枪的大小都是相同的,只是方向不同而已;还应注意到在这一情况下边界球大小相同,因为边界球对物体方向不敏感。
变换AABB
当物体在虚拟世界中移动时,它的AABB也需要随之移动。此时我们有两个选择----用变换后的物体来重新计算AABB,或者对AABB做和物体同样的变换。所得到的结果不一定是轴对齐的(如果物体旋转),也不一定是盒状的(如果物体发生了扭曲)。不过,通过"变换后的AABB"进行计算要比通过"经过变换后的物体"计算AABB快得多,因为AABB只有8个顶点。
通过"变换后的AABB"计算不能只是简单地变换8个顶点,也不能通过转换原pmin和pmax来得到新的pmin和pmax ----这样可能会导致xmin > xmax。为了计算新的AABB,必须先变换8个顶点,再从这8个顶点中计算一个新的AABB。
根据变换的不同,这种方法可能使新边界框比原边界框大许多。例如,在2D中,45度的旋转会大大增加边界框的尺寸,如图12.12所示:
![]()
比较图12.12中原AABB(灰色框)和新AABB(右边较大的方框),它是通过旋转后的AABB计算的,新AABB几乎是原来的两倍。注意,如果从旋转后的物体而不是通过旋转后的AABB来计算新AABB,它的大小将和原来的AABB相同。
可以利用AABB的结构来加快新的AABB的计算速度,而不必先变换8个顶点,再从这8个顶点中计算新AABB。
让我们简单回顾一下3x3矩阵变换一个3D点的过程:
![]()
设原边界框为xmin,xmax,ymin...,新边界框计算将得到x'min,x'max,y'min...。现在我们的任务就是想办法加快计算x'min的速度,换句话说,我们希望找到m11x+m21y+m31z的最小值,其中[x, y, z]是原8个顶点中的任意一个,我们所要做的就是找出这些点经过变换后谁的x坐标最小。看第一个乘积:m11x,为了最小化乘积,必须决定是用xmin还是xmax来代换其中的x。显然,如果m11>0,用xmin能得到最小化乘积;如果m11<0,则用xmax能得到最小化乘积。比较方便的是,不管xmin和xmax中哪个被用来计算xmin,都可以用另外一个来计算xmax。可以对矩阵9个元素中的每个都应用这个计算过程,
如下列代码所示:
//---------------------------------------------------------------------------// Transform the box and compute the new AABB. Remember, this always// results in an AABB that is at least as big as the origin, and may be// considerably bigger.//---------------------------------------------------------------------------void cAABB3::set_to_transformed_box(const cAABB3& box, const cMatrix4x3& m){// if we're empty, then bail.if(box.is_empty()){empty();return;} // start with the translation portionmin = max = get_translation(m); // examine each of the 9 matrix elements and compute the new AABB if(m.m11 > 0.0f){min.x += m.m11 * box.min.x;max.x += m.m11 * box.max.x;}else{min.x += m.m11 * box.max.x;max.x += m.m11 * box.min.x;}if(m.m21 > 0.0f){min.x += m.m21 * box.min.y; max.x += m.m21 * box.max.y;}else{min.x += m.m21 * box.max.y; max.x += m.m21 * box.min.y;}if(m.m31 > 0.0f){min.x += m.m31 * box.min.z; max.x += m.m31 * box.max.z;}else{min.x += m.m31 * box.max.z; max.x += m.m31 * box.min.z;}if(m.m12 > 0.0f) {min.y += m.m12 * box.min.x; max.y += m.m12 * box.max.x;}else{min.y += m.m12 * box.max.x; max.y += m.m12 * box.min.x;}if(m.m22 > 0.0f){min.y += m.m22 * box.min.y; max.y += m.m22 * box.max.y;}else{min.y += m.m22 * box.max.y; max.y += m.m22 * box.min.y;}if(m.m32 > 0.0f){min.y += m.m32 * box.min.z; max.y += m.m32 * box.max.z;}else{min.y += m.m32 * box.max.z; max.y += m.m32 * box.min.z;}if(m.m13 > 0.0f) {min.z += m.m13 * box.min.x; max.z += m.m13 * box.max.x;}else{min.z += m.m13 * box.max.x; max.z += m.m13 * box.min.x;}if(m.m23 > 0.0f){min.z += m.m23 * box.min.y; max.z += m.m23 * box.max.y;}else{min.z += m.m23 * box.max.y; max.z += m.m23 * box.min.y;}if(m.m33 > 0.0f){min.z += m.m33 * box.min.z; max.z += m.m33 * box.max.z;}else{min.z += m.m33 * box.max.z; max.z += m.m33 * box.min.z;}}后记:
包围盒作为一种约束,和坐标系有关系,世界坐标系标定了包围盒的精度。
3D集合图元:最小边界框/包围盒(boundingbox)相关推荐
- 实战:基于深度学习和几何的3D边界框估计
点击上方"小白学视觉",选择加"星标"或"置顶" 重磅干货,第一时间送达 3D 对象检测问题在需要决策或与现实世界中的对象交互的机器人应用中 ...
- Faster RCNN原理篇(一)——Bounding-Box Regression边界框回归的学习和理解
Bounding-Box Regression边界框回归的学习和理解 引言 1. (Why?)为何要做边框回归? 2. (What?)什么是边框回归? 3. (How?)如何实现边框回归? 4. 边框 ...
- 谷歌AI发布“会动的”3D物体数据集,附带标记边界框、相机位姿、稀疏点云,网友:快给我的AR模型用上...
萧箫 发自 凹非寺 量子位 报道 | 公众号 QbitAI 见过3D物体数据集,见过会动的3D物体数据集吗? 每段动态视频都以目标为中心拍摄,不仅自带标注整体的边界框,每个视频还附带相机位姿和稀疏点云 ...
- 单目摄像头检测输出 3D 边界框
单目摄像头检测输出 3D 边界框 单纯的 2D 检测框无法在 3D 空间去做规划控制,单目图像估计 3D 检测框也是自动驾驶研发的一个课题,百度 Apollo 发布 2.5 / 3.0 版本特意提到这 ...
- python半径为3圆形区域边界曲线_OpenCV 学习笔记03 边界框、最小矩形区域和最小闭圆的轮廓...
本节代码使用的opencv-python 4.0.1,numpy 1.15.4 + mkl 使用图片为 Mjolnir_Round_Car_Magnet_300x300.jpg 代码如下: impor ...
- 边界框的回归策略搞不懂?算法太多分不清?看这篇就够了
作者 | fivetrees 来源 | https://zhuanlan.zhihu.com/p/76477248 本文已由作者授权,未经允许,不得二次转载 [导读]目标检测包括目标分类和目标定位 2 ...
- Wise-IoU 作者导读:基于动态非单调聚焦机制的边界框损失
论文地址:Wise-IoU: Bounding Box Regression Loss with Dynamic Focusing Mechanism GitHub:https://github.co ...
- Ray-AABB问题:判断线段是否相交于轴对齐边界框(Axially Aligned Bounding Box, AABB)
摘要 Ray-AABB问题:判断线段是否相交于轴对齐边界框(Axially Aligned Bounding Box, AABB) 本文介绍了slab算法的实现,从一个简单实现开始,逐步优化slab算 ...
- imgaug增强边界框
imgaug对边界框及其扩展具有本地支持. 它们通过其左上角和右下角的坐标表示,既是绝对值,又具有亚像素精度. 在imgaug中,边框仅受增强器更改图像几何形状的影响. 例如 水平翻转或仿射变换. 它 ...
最新文章
- 经典的导航二级式导航菜单增强版
- 2019最强就业指南,看了达摩院十大科技趋势,再也不怕互联网寒冬
- python考证书-计算机二级 Python 怎么考?考什么?
- Zabbix的snmp监控
- Java中实现按字符串位数在前面补0
- 【数据库系统概论】考研第一部分重点分析【1.1】
- abstract类_【Java】类的结构 - Nemo
- Makefile、多Makefile编译静态库、动态库、SRC实例总结
- asynchronous vs non-blocking
- html——影响文档流属性详解
- revit2016与2017区别_【科普】Revit2016版与Revit2018版的区别?
- clark变换与Park变换的推导
- win10删除微软拼音
- 二元回归方程matlab,matlab 多元非线性回归方程问题
- Work breakdown structure 简介
- 《计算机工程》从投稿到录用之一手经验
- pandas.melt()详解
- 悬赏任务小程序搭建抖音点赞app任务发布接单平台任务分销公众号开发
- 通过js获取PHP设置的cookie(全实例讲解)
- Python相关的文件扩展名