快速入门 | 篇十二:正运动技术运动控制器U盘接口的使用
之前正运动技术与大家分享了,运动控制器的固件升级、ZBasic程序开发、ZPLC程序开发、与触摸屏通讯和输入/输出IO的应用、运动控制器数据与存储的应用、运动控制器ZCAN、EtherCAT总线的使用、示波器的应用、多任务运行的特点、运动控制器中断的应用等。
今天,我们来讲解一下正运动技术运动控制器U盘接口的使用。
视频教程:《正运动技术运动控制器U盘接口的使用》
以下是图文详解。
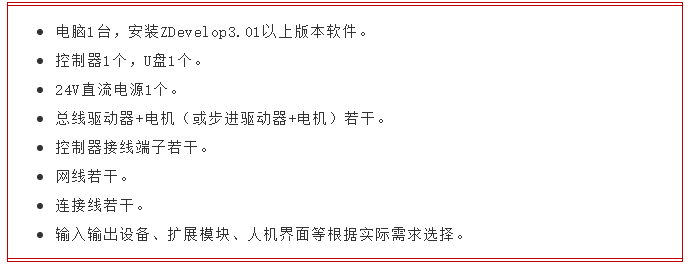
1、材料准备与控制器接线参考
1)材料准备
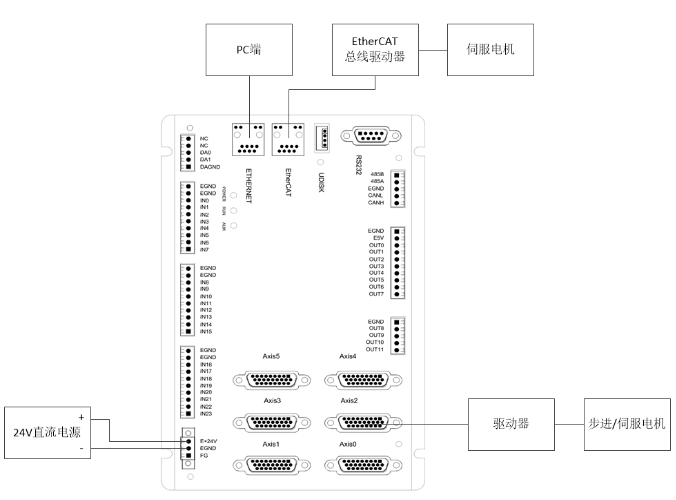
2)控制器接线参考
2、U盘的用途
不同型号的控制器U盘接口的使用方法都是相同的。
将U盘插在控制器上的UDISK端口即可,控制器上电后有U盘插入时,U盘指示灯亮。
U盘主要由两方面的用途:
1)程序升级
通过U盘口,下载打包好的ZAR程序包,方便客户更新系统程序。
程序升级之前事先将ZAR程序包下载到U盘里面。使用指令加载U盘文件成功后,ZAR程序自动开始运行。
2)U盘与寄存器数据交互
U盘读写变量和数组。
FLASH数据拷贝:多个控制器中FLASH存储的数据可以通过U盘来相互传递。
VR寄存器、TABLE寄存器与U盘里的数据互相传递。
读写文件类型为SD(filenum).BIN或SD(filenum).CSV,不同的指令可操作的文件类型有所区别。
3、U盘读写指令
U_STATE:U盘状态判断,检测到有U盘插入返回TRUE,否则返回FALSE。
1)U盘读写变量、数组
U_READ:从U盘中读取数据到变量或数组里。
U_READ2:从U盘中读取数据到变量或数组里,可选读取的起始位置。
U_WRITE:存储变量或者数组,数组的单个或部分元素到外部存储器里面。
2)U盘与寄存器数据交互
U盘与TABLE和VR数据读写的格式相同。
STICK_READ:从U盘读取数据到table。
STICK_WRITE:拷贝TABLE的数据到U盘。
STICK_READVR:从U盘读取数据到VR。
STICK_WRITEVR:拷贝VR的数据到U盘。
4、U盘读写示例
控制器对U盘进行读写操作之前,首先要确保U盘已经插上,使用U_STATE指令判断U盘状态。
操作指令:U_READ,U_WRITE
示例:
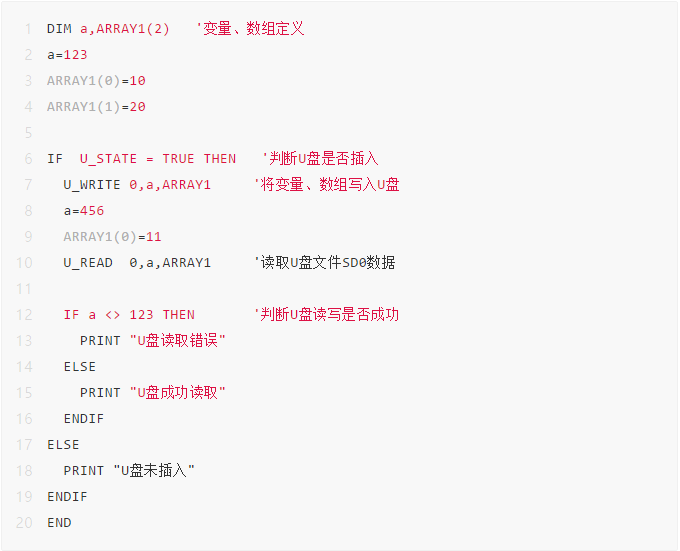
注意U盘数据的存储和读出的次序要一致。
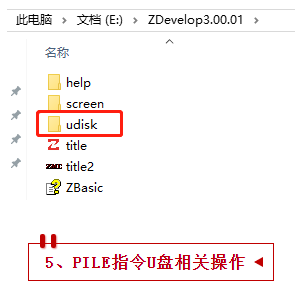
没有控制器时,可以使用仿真器,在编程软件的根目录下新建udisk文件模拟U盘。将U盘指令操作要用到的文件放入此文件夹即可。
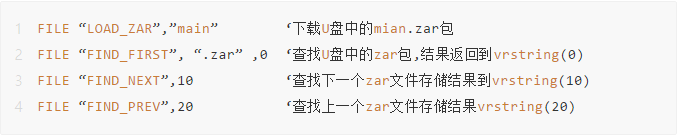
1)U盘zar文件操作。
2)U盘与FLASH数据操作。

FLASH块号与SD文件的编号是一一对应的,不需要要指定。
3)删除U盘文件,支持删除bin文件和z3p文件。

4)以字节方式加载U盘上的文件,支持读取多种类型的文件。
FILE
“LOAD_BYTE”, “00.txt”,
200, 10, 0
‘读取U盘上名称为
00.txt的文件,将读取结果转化成ASCII码,存储在TABLE(
200)开始的10个空间内。
最后一个参数offset为文件开始读取的字节偏移,设为0表示从第一个字符开始读取;设为1表示从第二个字符开始读取,跳过第一个字符,详情参见后方程序演示。
txt文件内容:ZMOTION
指令读取结果:
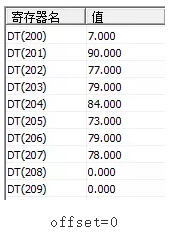
TABLE(200):总字节数
TABLE(201):读取到的第一个字节
TABLE(202):读取到的第二个字节
TABLE(200+n):读取到的第N个字节
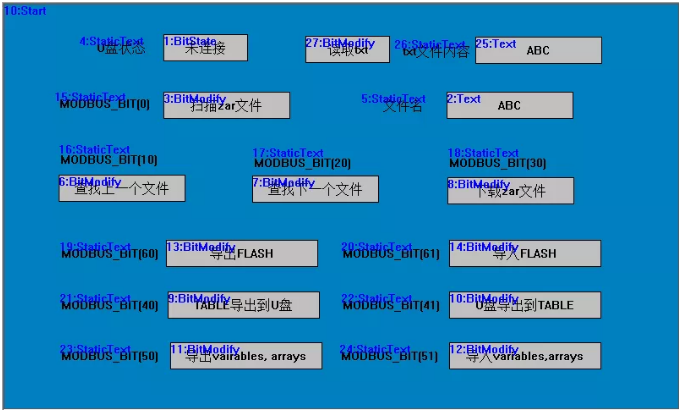
6、U盘使用演示例程
例程使用HMI组态传递MODBUS_BIT位寄存器的值来控制U盘指令的执行。
global sub main_int() '初始化函数
APP_PASS(123)
VRSTRING(1200,20)=“未扫描”
global warnstr(20) '定义提示信息的数组
dim result 'file指令读取结果标志
result=0 '返回-1为true,0为false
dim filenum 'zar文件编号
filenum=0
for i=0 to 100
table(i)=i
next
dim u,uu(8) 'U盘读写参数
u=10
for i=0 to 7
uu(i)=i
next
dim a,aa(8) 'FLASH读写参数
end sub
global sub main_scan() '周期函数
if U_STATE=TRUE then '获取U盘状态并显示连接或未连接
table(100)=1
elseif U_STATE=FALSE then
table(100)=0
endif
if U_STATE=TRUE then '判断U盘是否插入
'加载U盘的升级ZAR程序
if MODBUS_BIT(0)=1 then '判断按键是否按下
MODBUS_BIT(0)=0 '按键恢复
result=FILE"find_first",".zar",1200 ',zar可以替换为.bin,但是无法用load_bin下载
if result=-1 then '判断zar程序读取是否成功
filenum=1
else
print “没有文件”
endif
elseif MODBUS_BIT(10)=1 and result=-1 then
MODBUS_BIT(10)=0
result=FILE"find_prev",1200 '搜索上一个U盘文件
if result=-1 then
filenum=filenum-1
else
result=FILE"find_next",1200
warnstr= “The First File”
HMI_SHOWWINDOW(100)
endif
elseif MODBUS_BIT(20)=1 and result=-1 then
MODBUS_BIT(20)=0
result=FILE"find_next",1200 '搜索上一个U盘文件
if result=-1 then
filenum=filenum+1
else
result=FILE"find_prev",1200
warnstr=" The End File"
HMI_SHOWWINDOW(100)
endif
elseif MODBUS_BIT(30)=1 then
MODBUS_BIT(30)=0
result=FILE"load_zar",VRSTRING(1200,20) '加载U盘里面的ZAR升级文件
if result =0 then
result=FILE"find_first",".zar",1200
warnstr=" Download Failed"
HMI_SHOWWINDOW(100)
endif
'U盘与TABLE数据交互
'TABLE读写指令:STICK_WRITE STICK_READ
'VR读写指令:STICK_WRITEVR STICK_READVR
elseif MODBUS_BIT(40)=1 then '对table或VR进行操作
MODBUS_BIT(40)=0
STICK_WRITE(10,0,5,1) 'table输出到U盘,从table(0)开始取五个元素
print “table输出到U盘”
elseif MODBUS_BIT(41)=1 then
MODBUS_BIT(41)=0
STICK_READ(10,0,1) 'U盘输出到table(0)开始地址
print “U盘输出到table”
'U盘数据读写
elseif MODBUS_BIT(50)=1 then
MODBUS_BIT(50)=0
U_WRITE 1,u,uu '数据写入U盘,对变量和数组进行操作
print “数据写入U盘”
elseif MODBUS_BIT(51)=1 then
MODBUS_BIT(51)=0
U_READ 1,u,uu 'U盘数据读出
print “U盘数据读出”
'U盘与FLASH数据交互
elseif MODBUS_BIT(60)=1 then
MODBUS_BIT(60)=0
FLASH_WRITE 3,a aa
file"copy_from",“sd3.bin”'本条指令sd num就是指flash块的编号,此时将flash块3的数据复制到u盘
print “flash块的数据复制到u盘”
elseif MODBUS_BIT(61)=1 then
MODBUS_BIT(61)=0
file"copy_to",“sd1.bin” '读取sd1的数据写入flash块1
print “u盘数据写入flash”
flash_read 1,a,aa
print *aa
'读取U盘文件内容
elseif MODBUS_BIT(11)=1 then
MODBUS_BIT(11)=0
FILE"LOAD_BYTE",“00.txt”,200,10,0 '读取u盘中文本文件数据保存到table200开始的10个地址中
print “读取u盘txt文件”
endif
endif
end sub
HMI组态界面:
没有触摸屏时,打开ZDevelop编程软件根目录找到screen文件夹,打开里面的xplcterm应用程序,连接到控制器即可进行触摸屏仿真。

正运动技术运动控制器U盘接口的使用就分享到这里,更多精彩内容,请关注我们的公众号。
本文由正运动小助手原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。
快速入门 | 篇十二:正运动技术运动控制器U盘接口的使用相关推荐
- 快速入门 | 篇十三:正运动技术运动控制器ZDevelop 编程软件的使用
之前正运动技术与大家分享了,运动控制器的固件升级.ZBasic程序开发.ZPLC程序开发.与触摸屏通讯和输入/输出IO的应用.运动控制器数据与存储的应用.运动控制器ZCAN.EtherCAT总线的使用 ...
- 快速入门 | 篇十一: 正运动技术运动控制器中断的应用
之前正运动技术与大家分享了,运动控制器的固件升级.ZBasic程序开发.ZPLC程序开发.与触摸屏通讯和输入/输出IO的应用.运动控制器数据与存储的应用.运动控制器ZCAN.EtherCAT总线的使用 ...
- 快速入门 | 篇十八:正运动技术脉冲型运动控制器的使用
视频教程:<正运动技术脉冲型运动控制器的使用> 今天,正运动技术来分享一下,脉冲型运动控制器的使用入门.首先,我们从准备工作讲起,然后依次讲控制器与电脑连接.控制器参数设置.驱动器参数设置 ...
- 快速入门 | 篇十四:运动控制器基础轴参数与基础运动控制指令
之前正运动技术与大家分享了,运动控制器的固件升级.ZBasic程序开发.ZPLC程序开发.与触摸屏通讯和输入/输出IO的应用.运动控制器数据与存储的应用.运动控制器ZCAN.EtherCAT总线的使用 ...
- K8S 快速入门(十二)实战篇:配置 ConfigMapSecret
一.ConfigMap 官方文档 ConfigMap 1. 动机 我们经常都需要为我们的应用程序配置一些特殊的数据,比如密钥.Token .数据库连接地址或者其他私密的信息.你的应用可能会使用一些特定 ...
- 运动控制器编程_快速入门 | 篇二十一:运动控制器ZHMI组态编程简介一
点击上方"正运动小助手",随时关注新动态! 运动控制器ZHMI组态编程简介一 今天我们来学习一下,运动控制器的ZHMI组态编程简介.本文主要从产品概述.控制器连接触摸屏使用.HM ...
- 两轴插补速度怎么给定_快速入门 | 篇十七:运动控制器多轴插补运动指令的使用...
以下是图文详解 本节内容主要分为三大部分:插补运动.轨迹前瞻以及SP速度指令. 一 插补运动 插补是机床数控系统依照一定方法确定刀具运动轨迹的过程,插补是一个实时进行的数据密化的过程,不论是何种插补算 ...
- 快速入门 | 篇十七:运动控制器多轴插补运动指令的使用
视频教程:<视频教程:运动控制器多轴插补运动指令的使用> 以下是图文详解 本节内容主要分为三大部分:插补运动.轨迹前瞻以及SP速度指令. 一 插补运动 插补是机床数控系统依照一定方法确定刀 ...
- Lua快速入门篇(XLua教程)(Yanlz+热更新+xLua+配置+热补丁+第三方库+API+二次开发+常见问题+示例参考)
<Lua热更新> ##<Lua热更新>发布说明: ++++"Lua热更新"开始了,立钻哥哥终于开始此部分的探 ...
最新文章
- 平安人寿福利BUFF重磅推介 | 北京研发中心职位速递
- C++案例-员工分组
- 在ASP.NET Core Web API上使用Swagger提供API文档
- MongoDB的安装和启动方法详解
- ReactiveCocoa 5.0 初窥:可能是最痛的一次升级
- WINDOWS上OpenCV需要有MediaPlayer才能正确运行?
- live2d_vue-live2d 看板娘
- DirectX 龙书 混合 理解
- Microsoft Office 2019 正式版 安装记录
- Ubuntu 13.10 安装后配置
- IT人才外包服务的好处?
- TCP服务器和客户端的创建(socket/socketserver)
- 嵌入式计算机的关键特征,与通用计算机的区别
- Neo4j 实战篇(一)基于Py2Neo构建电影知识图谱
- 什么是过拟合、欠拟合现象以及如何缓解?
- 乖离率背离公式_乖离率BIAS操盘口诀:“W底上涨为先,M顶下跌为先”仅12字,赚得盆满钵满...
- 推荐一部美国电影---‘’决胜21点‘’O(∩_∩)O
- 一个基于C#实现的简易QQ农场
- 艾默生流量计如何做好清洁排空工作
- verilog学习记(学习设计cpu)