OpenCV之imgproc 模块. 图像处理(3)霍夫线变换 霍夫圆变换 Remapping 重映射 仿射变换
霍夫线变换
目标
在这个部分您将学习到:
- 使用OpenCV的以下函数 HoughLines 和 HoughLinesP 来检测图像中的直线.
原理
Note
以下原理的说明来自书籍 学习OpenCV 作者Bradski和Kaehler.
霍夫线变换
- 霍夫线变换是一种用来寻找直线的方法.
- 是用霍夫线变换之前, 首先要对图像进行边缘检测的处理,也即霍夫线变换的直接输入只能是边缘二值图像.
它是如何实现的?
众所周知, 一条直线在图像二维空间可由两个变量表示. 例如:
- 在 笛卡尔坐标系: 可由参数:
 斜率和截距表示.
斜率和截距表示. - 在 极坐标系: 可由参数:
 极径和极角表示
极径和极角表示
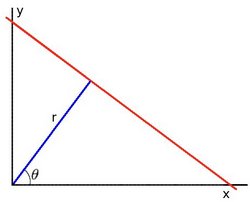
对于霍夫变换, 我们将用 极坐标系 来表示直线. 因此, 直线的表达式可为:
化简得:

- 在 笛卡尔坐标系: 可由参数:
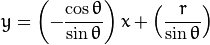
一般来说对于点
 , 我们可以将通过这个点的一族直线统一定义为:
, 我们可以将通过这个点的一族直线统一定义为:
这就意味着每一对
 代表一条通过点 的直线.
代表一条通过点 的直线.如果对于一个给定点
我们在极坐标对极径极角平面绘出所有通过它的直线, 将得到一条正弦曲线. 例如, 对于给定点 and
and  我们可以绘出下图 (在平面
我们可以绘出下图 (在平面  -
-  ):
):
只绘出满足下列条件的点
 and
and  .
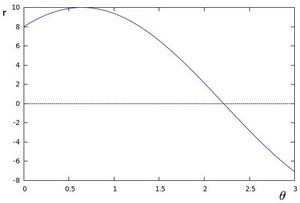
.我们可以对图像中所有的点进行上述操作. 如果两个不同点进行上述操作后得到的曲线在平面
- 相交, 这就意味着它们通过同一条直线. 例如, 接上面的例子我们继续对点:  ,
,  和点
和点  ,
,  绘图, 得到下图:
绘图, 得到下图: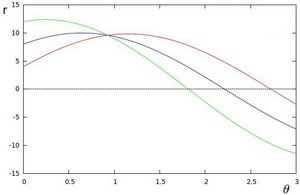
这三条曲线在
- 平面相交于点  , 坐标表示的是参数对 (
, 坐标表示的是参数对 ( ) 或者是说点 , 点
) 或者是说点 , 点  和点
和点  组成的平面内的的直线.
组成的平面内的的直线.那么以上的材料要说明什么呢? 这意味着一般来说, 一条直线能够通过在平面
- 寻找交于一点的曲线数量来 检测. 越多曲线交于一点也就意味着这个交点表示的直线由更多的点组成. 一般来说我们可以通过设置直线上点的 阈值 来定义多少条曲线交于一点我们才认为 检测 到了一条直线.这就是霍夫线变换要做的. 它追踪图像中每个点对应曲线间的交点. 如果交于一点的曲线的数量超过了 阈值, 那么可以认为这个交点所代表的参数对
 在原图像中为一条直线.
在原图像中为一条直线.
标准霍夫线变换和统计概率霍夫线变换
OpenCV实现了以下两种霍夫线变换:
- 标准霍夫线变换
- 原理在上面的部分已经说明了. 它能给我们提供一组参数对
- 在OpenCV 中通过函数 HoughLines 来实现
- 统计概率霍夫线变换
- 这是执行起来效率更高的霍夫线变换. 它输出检测到的直线的端点
- 在OpenCV 中它通过函数 HoughLinesP 来实现

代码
- 这个程序是用来做什么的?
- 加载一幅图片
- 对图片进行 标准霍夫线变换 或是 统计概率霍夫线变换.
- 分别在两个窗口显示原图像和绘出检测到直线的图像.
- 我们将要说明的例程能从 这里 下载。 一个更高级的版本 (能同时演示标准霍夫线变换和统计概率霍夫线变换并带有活动条来改变变换的阈值) 能从 这里 下载。
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"#include <iostream>using namespace cv;
using namespace std;void help()
{cout << "\nThis program demonstrates line finding with the Hough transform.\n""Usage:\n""./houghlines <image_name>, Default is pic1.jpg\n" << endl;
}int main(int argc, char** argv)
{const char* filename = argc >= 2 ? argv[1] : "pic1.jpg";Mat src = imread(filename, 0);if(src.empty()){help();cout << "can not open " << filename << endl;return -1;}Mat dst, cdst;Canny(src, dst, 50, 200, 3);cvtColor(dst, cdst, CV_GRAY2BGR);#if 0
vector<Vec2f> lines;
HoughLines(dst, lines, 1, CV_PI/180, 100, 0, 0 ); for( size_t i = 0; i < lines.size(); i++ )
{ float rho = lines[i][0], theta = lines[i][1];
Point pt1, pt2;
double a = cos(theta), b = sin(theta);
double x0 = a*rho, y0 = b*rho;
pt1.x = cvRound(x0 + 1000*(-b));
pt1.y = cvRound(y0 + 1000*(a));
pt2.x = cvRound(x0 - 1000*(-b));
pt2.y = cvRound(y0 - 1000*(a));
line( cdst, pt1, pt2, Scalar(0,0,255), 3, CV_AA);
}
#else
vector<Vec4i> lines;
HoughLinesP(dst, lines, 1, CV_PI/180, 50, 50, 10 );
for( size_t i = 0; i < lines.size(); i++ )
{ Vec4i l = lines[i];
line( cdst, Point(l[0], l[1]), Point(l[2], l[3]), Scalar(0,0,255), 3, CV_AA);
}
#endifimshow("source", src);imshow("detected lines", cdst);waitKey();return 0;
}
代码说明
加载图片
Mat src = imread(filename, 0); if(src.empty()) {help();cout << "can not open " << filename << endl;return -1; }用Canny算子对图像进行边缘检测
Canny(src, dst, 50, 200, 3);
现在我们将要执行霍夫线变换. 我们将会说明怎样使用OpenCV的函数做到这一点:
标准霍夫线变换
首先, 你要执行变换:
vector<Vec2f> lines; HoughLines(dst, lines, 1, CV_PI/180, 100, 0, 0 );
带有以下自变量:
- dst: 边缘检测的输出图像. 它应该是个灰度图 (但事实上是个二值化图)
- lines: 储存着检测到的直线的参数对 的容器 * rho : 参数极径 以像素值为单位的分辨率. 我们使用 1像素.
- theta: 参数极角 以弧度为单位的分辨率. 我们使用 1度 (即CV_PI/180)
- threshold: 要”检测” 一条直线所需最少的的曲线交点
- srn and stn: 参数默认为0. 查缺OpenCV参考文献来获取更多信息.
通过画出检测到的直线来显示结果.
for( size_t i = 0; i < lines.size(); i++ ) {float rho = lines[i][0], theta = lines[i][1];Point pt1, pt2;double a = cos(theta), b = sin(theta);double x0 = a*rho, y0 = b*rho;pt1.x = cvRound(x0 + 1000*(-b));pt1.y = cvRound(y0 + 1000*(a));pt2.x = cvRound(x0 - 1000*(-b));pt2.y = cvRound(y0 - 1000*(a));line( cdst, pt1, pt2, Scalar(0,0,255), 3, CV_AA); }
统计概率霍夫线变换
首先, 你要执行变换:
vector<Vec4i> lines; HoughLinesP(dst, lines, 1, CV_PI/180, 50, 50, 10 );
带有以下自变量:
- dst: 边缘检测的输出图像. 它应该是个灰度图 (但事实上是个二值化图) * lines: 储存着检测到的直线的参数对
 的容器
的容器 - rho : 参数极径 以像素值为单位的分辨率. 我们使用 1 像素.
- theta: 参数极角 以弧度为单位的分辨率. 我们使用 1度 (即CV_PI/180)
- threshold: 要”检测” 一条直线所需最少的的曲线交点 * minLinLength: 能组成一条直线的最少点的数量. 点数量不足的直线将被抛弃.
- maxLineGap: 能被认为在一条直线上的亮点的最大距离.
- dst: 边缘检测的输出图像. 它应该是个灰度图 (但事实上是个二值化图) * lines: 储存着检测到的直线的参数对
通过画出检测到的直线来显示结果.
for( size_t i = 0; i < lines.size(); i++ ) {Vec4i l = lines[i];line( cdst, Point(l[0], l[1]), Point(l[2], l[3]), Scalar(0,0,255), 3, CV_AA); }
显示原始图像和检测到的直线:
imshow("source", src); imshow("detected lines", cdst);等待用户按键推出程序
waitKey();
结果
Note
得到的结果使用的是在上面 代码 部分提到的更高级版代码. 霍夫线变换的代码没有改变, 唯一不同的是在GUI的部分加入了活动条可动态改变阈值.输入图像为:

通过执行统计概率霍夫线变换我们能得到下面的结果:
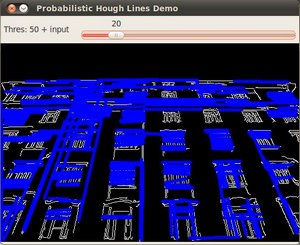
当你使用滑动条来改变 阈值 的时候会观察到检测到线的数目的改变. 这是因为: 如果你设置了一个更大的阈值, 能检测到的线的数目将更少 (你需要更多的点来表示一条能检测到的直线).
霍夫圆变换
目标
在这个教程中你将学习如何:
- 使用OpenCV函数 HoughCircles 在图像中检测圆.
原理
霍夫圆变换
霍夫圆变换的基本原理和上个教程中提到的霍夫线变换类似, 只是点对应的二维极径极角空间被三维的圆心点x, y还有半径r空间取代.
对直线来说, 一条直线能由参数极径极角
 表示. 而对圆来说, 我们需要三个参数来表示一个圆, 如上文所说现在原图像的边缘图像的任意点对应的经过这个点的所有可能圆是在三维空间有下面这三个参数来表示了,其对应一条三维空间的曲线. 那么与二维的霍夫线变换同样的道理, 对于多个边缘点越多这些点对应的三维空间曲线交于一点那么他们经过的共同圆上的点就越多,类似的我们也就可以用同样的阈值的方法来判断一个圆是否被检测到, 这就是标准霍夫圆变换的原理, 但也正是在三维空间的计算量大大增加的原因, 标准霍夫圆变化很难被应用到实际中:
表示. 而对圆来说, 我们需要三个参数来表示一个圆, 如上文所说现在原图像的边缘图像的任意点对应的经过这个点的所有可能圆是在三维空间有下面这三个参数来表示了,其对应一条三维空间的曲线. 那么与二维的霍夫线变换同样的道理, 对于多个边缘点越多这些点对应的三维空间曲线交于一点那么他们经过的共同圆上的点就越多,类似的我们也就可以用同样的阈值的方法来判断一个圆是否被检测到, 这就是标准霍夫圆变换的原理, 但也正是在三维空间的计算量大大增加的原因, 标准霍夫圆变化很难被应用到实际中:
这里的
 表示圆心的位置 (下图中的绿点) 而 表示半径, 这样我们就能唯一的定义一个圆了, 见下图:
表示圆心的位置 (下图中的绿点) 而 表示半径, 这样我们就能唯一的定义一个圆了, 见下图: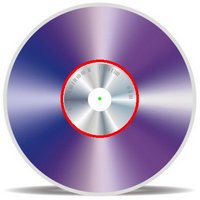
出于上面提到的对运算效率的考虑, OpenCV实现的是一个比标准霍夫圆变换更为灵活的检测方法: 霍夫梯度法, 也叫2-1霍夫变换(21HT), 它的原理依据是圆心一定是在圆上的每个点的模向量上, 这些圆上点模向量的交点就是圆心, 霍夫梯度法的第一步就是找到这些圆心, 这样三维的累加平面就又转化为二维累加平面. 第二部根据所有候选中心的边缘非0像素对其的支持程度来确定半径. 21HT方法最早在Illingworth的论文The Adaptive Hough Transform中提出并详细描述, 也可参照Yuen在1990年发表的A Comparative Study of Hough Transform Methods for Circle Finding, Bradski的《学习OpenCV》一书则对OpenCV中具体对算法的具体实现有详细描述并讨论了霍夫梯度法的局限性.
例程
- 这个例程是用来干嘛的?
- 加载一幅图像并对其模糊化以降噪
- 对模糊化后的图像执行霍夫圆变换 .
- 在窗体中显示检测到的圆.
- 下面要讲解的例程代码能从 这里 下载. 一个更高级的版本 (能同时演示标准霍夫圆变换和统计概率霍夫圆变换并带有可改变阈值的滑动条) 能从 这里 找到.
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include <iostream>
#include <stdio.h>using namespace cv;/** @function main */
int main(int argc, char** argv)
{Mat src, src_gray;/// Read the imagesrc = imread( argv[1], 1 );if( !src.data ){ return -1; }/// Convert it to graycvtColor( src, src_gray, CV_BGR2GRAY );/// Reduce the noise so we avoid false circle detectionGaussianBlur( src_gray, src_gray, Size(9, 9), 2, 2 );vector<Vec3f> circles;/// Apply the Hough Transform to find the circlesHoughCircles( src_gray, circles, CV_HOUGH_GRADIENT, 1, src_gray.rows/8, 200, 100, 0, 0 );/// Draw the circles detectedfor( size_t i = 0; i < circles.size(); i++ ){Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));int radius = cvRound(circles[i][2]);// circle centercircle( src, center, 3, Scalar(0,255,0), -1, 8, 0 );// circle outlinecircle( src, center, radius, Scalar(0,0,255), 3, 8, 0 );}/// Show your resultsnamedWindow( "Hough Circle Transform Demo", CV_WINDOW_AUTOSIZE );imshow( "Hough Circle Transform Demo", src );waitKey(0);return 0;
}
说明
加载一幅图像
src = imread( argv[1], 1 );if( !src.data ){ return -1; }转成灰度图:
cvtColor( src, src_gray, CV_BGR2GRAY );
执行高斯模糊以降低噪声:
GaussianBlur( src_gray, src_gray, Size(9, 9), 2, 2 );
执行霍夫圆变换:
vector<Vec3f> circles;HoughCircles( src_gray, circles, CV_HOUGH_GRADIENT, 1, src_gray.rows/8, 200, 100, 0, 0 );
函数带有以下自变量:
- src_gray: 输入图像 (灰度图)
- circles: 存储下面三个参数:
 集合的容器来表示每个检测到的圆.
集合的容器来表示每个检测到的圆. - CV_HOUGH_GRADIENT: 指定检测方法. 现在OpenCV中只有霍夫梯度法
- dp = 1: 累加器图像的反比分辨率
- min_dist = src_gray.rows/8: 检测到圆心之间的最小距离
- param_1 = 200: Canny边缘函数的高阈值
- param_2 = 100: 圆心检测阈值.
- min_radius = 0: 能检测到的最小圆半径, 默认为0.
- max_radius = 0: 能检测到的最大圆半径, 默认为0
绘出检测到的圆:
for( size_t i = 0; i < circles.size(); i++ ) {Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));int radius = cvRound(circles[i][2]);// circle centercircle( src, center, 3, Scalar(0,255,0), -1, 8, 0 );// circle outlinecircle( src, center, radius, Scalar(0,0,255), 3, 8, 0 );}你将会看到圆用红色绘出而圆心用小绿点表示
显示检测到的圆:
namedWindow( "Hough Circle Transform Demo", CV_WINDOW_AUTOSIZE ); imshow( "Hough Circle Transform Demo", src );
等待用户按键结束程序
waitKey(0);
结果
上面例程输入一张图例得出的运行结果如下:

Remapping 重映射
目标
本教程向你展示如何使用OpenCV函数 remap 来实现简单重映射.
理论
重映射是什么意思?
把一个图像中一个位置的像素放置到另一个图片指定位置的过程.
为了完成映射过程, 有必要获得一些插值为非整数像素坐标,因为源图像与目标图像的像素坐标不是一一对应的.
我们通过重映射来表达每个像素的位置
 :
:
这里
 是目标图像,
是目标图像,  是源图像,
是源图像,  是作用于 的映射方法函数.
是作用于 的映射方法函数.让我们来思考一个快速的例子. 想象一下我们有一个图像
 , 我们想满足下面的条件作重映射:
, 我们想满足下面的条件作重映射:
会发生什么? 图像会按照
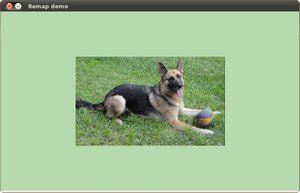
 轴方向发生翻转. 例如, 源图像如下:
轴方向发生翻转. 例如, 源图像如下:
看到红色圈关于 x 的位置改变(
轴水平翻转):
通过 OpenCV 的函数 remap 提供一个简单的重映射实现.
代码
- 本程序做什么?
- 装载一幅图像.
- 程序按秒循环, 在一个窗口中顺序出现4种重映射过程对相同的图像.
- 等待用户按 ‘ESC’ 键退出程序。
- 下面是本教程代码. 你也可以从 这里 下载。
#include "opencv2/highgui/highgui.hpp"#include "opencv2/imgproc/imgproc.hpp"#include <iostream>#include <stdio.h>using namespace cv;/// Global variablesMat src, dst;Mat map_x, map_y;char* remap_window = "Remap demo";int ind = 0;/// Function Headersvoid update_map( void );/**
* @function main
*/int main( int argc, char** argv ){/// Load the imagesrc = imread( argv[1], 1 );/// Create dst, map_x and map_y with the same size as src:dst.create( src.size(), src.type() );map_x.create( src.size(), CV_32FC1 );map_y.create( src.size(), CV_32FC1 );/// Create windownamedWindow( remap_window, CV_WINDOW_AUTOSIZE );/// Loopwhile( true ){/// Each 1 sec. Press ESC to exit the programint c = waitKey( 1000 );if( (char)c == 27 ){ break; }/// Update map_x & map_y. Then apply remapupdate_map();remap( src, dst, map_x, map_y, CV_INTER_LINEAR, BORDER_CONSTANT, Scalar(0,0, 0) );/// Display resultsimshow( remap_window, dst );}return 0;}/**
* @function update_map
* @brief Fill the map_x and map_y matrices with 4 types of mappings
*/void update_map( void ){ind = ind%4;for( int j = 0; j < src.rows; j++ ){ for( int i = 0; i < src.cols; i++ ){switch( ind ){case 0:if( i > src.cols*0.25 && i < src.cols*0.75 && j > src.rows*0.25 && j < src.rows*0.75 ){map_x.at<float>(j,i) = 2*( i - src.cols*0.25 ) + 0.5 ;map_y.at<float>(j,i) = 2*( j - src.rows*0.25 ) + 0.5 ;}else{ map_x.at<float>(j,i) = 0 ;map_y.at<float>(j,i) = 0 ;}break;case 1:map_x.at<float>(j,i) = i ;map_y.at<float>(j,i) = src.rows - j ;break;case 2:map_x.at<float>(j,i) = src.cols - i ;map_y.at<float>(j,i) = j ;break;case 3:map_x.at<float>(j,i) = src.cols - i ;map_y.at<float>(j,i) = src.rows - j ;break;} // end of switch}}ind++;
}
说明
首先准备程序用到的变量:
Mat src, dst; Mat map_x, map_y; char* remap_window = "Remap demo"; int ind = 0;
加载一幅图像:
src = imread( argv[1], 1 );
创建目标图像和两个映射矩阵.( x 和 y )
dst.create( src.size(), src.type() ); map_x.create( src.size(), CV_32FC1 ); map_y.create( src.size(), CV_32FC1 );
创建一个窗口用于展示结果.
namedWindow( remap_window, CV_WINDOW_AUTOSIZE );
建立一个间隔1000毫秒的循环,每次循环执行更新映射矩阵参数并对源图像进行重映射处理(使用 mat_x 和 mat_y),然后把更新后的目标图像显示出来:
while( true ) {/// Each 1 sec. Press ESC to exit the programint c = waitKey( 1000 );if( (char)c == 27 ){ break; }/// Update map_x & map_y. Then apply remapupdate_map();remap( src, dst, map_x, map_y, CV_INTER_LINEAR, BORDER_CONSTANT, Scalar(0,0, 0) );/// Display resultsimshow( remap_window, dst ); }上面用到的重映射函数 remap. 参数说明:
- src: 源图像
- dst: 目标图像,与 src 相同大小
- map_x: x方向的映射参数. 它相当于方法
 的第一个参数
的第一个参数 - map_y: y方向的映射参数. 注意 map_y 和 map_x 与 src 的大小一致。
- CV_INTER_LINEAR: 非整数像素坐标插值标志. 这里给出的是默认值(双线性插值).
- BORDER_CONSTANT: 默认
如何更新重映射矩阵 mat_x 和 mat_y? 请继续看:
更新重映射矩阵: 我们将分别使用4种不同的映射:
图像宽高缩小一半,并显示在中间:

所有成对的参数
 处理后都符合:
处理后都符合:  和
和 
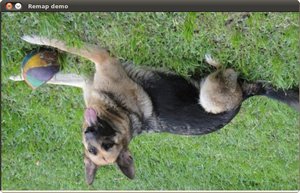
图像上下颠倒:

图像左右颠倒:

同时执行b和c的操作:

下面的代码片段说明上述的映射过程. 在这里 map_x 代表第一个坐标 h(i,j) , map_y 是第二个坐标.
for( int j = 0; j < src.rows; j++ ) { for( int i = 0; i < src.cols; i++ ){switch( ind ){case 0:if( i > src.cols*0.25 && i < src.cols*0.75 && j > src.rows*0.25 && j < src.rows*0.75 ){map_x.at<float>(j,i) = 2*( i - src.cols*0.25 ) + 0.5 ;map_y.at<float>(j,i) = 2*( j - src.rows*0.25 ) + 0.5 ;}else{ map_x.at<float>(j,i) = 0 ;map_y.at<float>(j,i) = 0 ;}break;case 1:map_x.at<float>(j,i) = i ;map_y.at<float>(j,i) = src.rows - j ;break;case 2:map_x.at<float>(j,i) = src.cols - i ;map_y.at<float>(j,i) = j ;break;case 3:map_x.at<float>(j,i) = src.cols - i ;map_y.at<float>(j,i) = src.rows - j ;break;} // end of switch}}ind++; }
结果
上面的代码编译后, 运行时给一个图片路径参数. 例如,使用下面的图片:

图像宽高缩小一半,并显示在中间:
图像上下颠倒:

图像左右颠倒:

两个方向同时颠倒:
仿射变换
目标
在这个教程中你将学习到如何:
- 使用OpenCV函数 warpAffine 来实现一些简单的重映射.
- 使用OpenCV函数 getRotationMatrix2D 来获得一个
 旋转矩阵
旋转矩阵
原理
什么是仿射变换?
一个任意的仿射变换都能表示为 乘以一个矩阵 (线性变换) 接着再 加上一个向量 (平移).
综上所述, 我们能够用仿射变换来表示:
- 旋转 (线性变换)
- 平移 (向量加)
- 缩放操作 (线性变换)
你现在可以知道, 事实上, 仿射变换代表的是两幅图之间的 关系 .
我们通常使用
矩阵来表示仿射变换.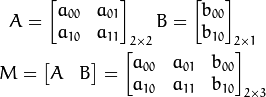
考虑到我们要使用矩阵
 和
和  对二维向量
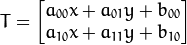
对二维向量  做变换, 所以也能表示为下列形式:
做变换, 所以也能表示为下列形式: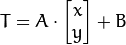 or
or 
怎样才能求得一个仿射变换?
好问题. 我们在上文有提到过仿射变换基本表示的就是两幅图片之间的 联系 . 关于这种联系的信息大致可从以下两种场景获得:
- 我们已知
 和 T 而且我们知道他们是有联系的. 接下来我们的工作就是求出矩阵
和 T 而且我们知道他们是有联系的. 接下来我们的工作就是求出矩阵 
- 我们已知 and . 要想求得
 . 我们只要应用算式
. 我们只要应用算式  即可. 对于这种联系的信息可以用矩阵 清晰的表达 (即给出明确的2×3矩阵) 或者也可以用两幅图片点之间几何关系来表达.
即可. 对于这种联系的信息可以用矩阵 清晰的表达 (即给出明确的2×3矩阵) 或者也可以用两幅图片点之间几何关系来表达.
- 我们已知
让我们形象地说明一下. 因为矩阵
联系着两幅图片, 我们以其表示两图中各三点直接的联系为例. 见下图: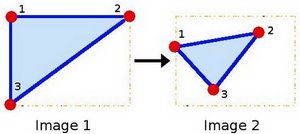
点1, 2 和 3 (在图一中形成一个三角形) 与图二中三个点一一映射, 仍然形成三角形, 但形状已经大大改变. 如果我们能通过这样两组三点求出仿射变换 (你能选择自己喜欢的点), 接下来我们就能把仿射变换应用到图像中所有的点.
例程
- 这个例程是做什么的?
- 加载一幅图片
- 对这幅图片应用仿射变换. 这个变换是从源图像和目标图像的两组三点之间的联系获得的. 这一步我们使用函数warpAffine 来实现.
- 仿射变换结束后再对图像应用旋转. 这里的旋转绕图像中点
- 等待用户退出程序
- 例程代码在下面给出. 当然你也可以从 这里 下载
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include <iostream>
#include <stdio.h>using namespace cv;
using namespace std;/// 全局变量
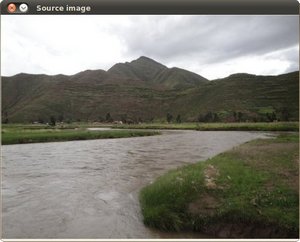
char* source_window = "Source image";
char* warp_window = "Warp";
char* warp_rotate_window = "Warp + Rotate";/** @function main */int main( int argc, char** argv ){Point2f srcTri[3];Point2f dstTri[3];Mat rot_mat( 2, 3, CV_32FC1 );Mat warp_mat( 2, 3, CV_32FC1 );Mat src, warp_dst, warp_rotate_dst;/// 加载源图像src = imread( argv[1], 1 );/// 设置目标图像的大小和类型与源图像一致warp_dst = Mat::zeros( src.rows, src.cols, src.type() );/// 设置源图像和目标图像上的三组点以计算仿射变换srcTri[0] = Point2f( 0,0 );srcTri[1] = Point2f( src.cols - 1, 0 );srcTri[2] = Point2f( 0, src.rows - 1 );dstTri[0] = Point2f( src.cols*0.0, src.rows*0.33 );dstTri[1] = Point2f( src.cols*0.85, src.rows*0.25 );dstTri[2] = Point2f( src.cols*0.15, src.rows*0.7 );/// 求得仿射变换warp_mat = getAffineTransform( srcTri, dstTri );/// 对源图像应用上面求得的仿射变换warpAffine( src, warp_dst, warp_mat, warp_dst.size() );/** 对图像扭曲后再旋转 *//// 计算绕图像中点顺时针旋转50度缩放因子为0.6的旋转矩阵Point center = Point( warp_dst.cols/2, warp_dst.rows/2 );double angle = -50.0;double scale = 0.6;/// 通过上面的旋转细节信息求得旋转矩阵rot_mat = getRotationMatrix2D( center, angle, scale );/// 旋转已扭曲图像warpAffine( warp_dst, warp_rotate_dst, rot_mat, warp_dst.size() );/// 显示结果namedWindow( source_window, CV_WINDOW_AUTOSIZE );imshow( source_window, src );namedWindow( warp_window, CV_WINDOW_AUTOSIZE );imshow( warp_window, warp_dst );namedWindow( warp_rotate_window, CV_WINDOW_AUTOSIZE );imshow( warp_rotate_window, warp_rotate_dst );/// 等待用户按任意按键退出程序waitKey(0);return 0;}
说明
定义一些需要用到的变量, 比如需要用来储存中间和目标图像的Mat和两个需要用来定义仿射变换的二维点数组.
Point2f srcTri[3]; Point2f dstTri[3];Mat rot_mat( 2, 3, CV_32FC1 ); Mat warp_mat( 2, 3, CV_32FC1 ); Mat src, warp_dst, warp_rotate_dst;
加载源图像:
src = imread( argv[1], 1 );
以与源图像同样的类型和大小来对目标图像初始化:
warp_dst = Mat::zeros( src.rows, src.cols, src.type() );
仿射变换: 正如上文所说, 我们需要源图像和目标图像上分别一一映射的三个点来定义仿射变换:
srcTri[0] = Point2f( 0,0 ); srcTri[1] = Point2f( src.cols - 1, 0 ); srcTri[2] = Point2f( 0, src.rows - 1 );dstTri[0] = Point2f( src.cols*0.0, src.rows*0.33 ); dstTri[1] = Point2f( src.cols*0.85, src.rows*0.25 ); dstTri[2] = Point2f( src.cols*0.15, src.rows*0.7 );
你可能想把这些点绘出来以获得对变换的更直观感受. 他们的位置大概就是在上面图例中的点的位置 (原理部分). 你会注意到由三点定义的三角形的大小和方向改变了.
通过这两组点, 我们能够使用OpenCV函数 getAffineTransform 来求出仿射变换:
warp_mat = getAffineTransform( srcTri, dstTri );
我们获得了用以描述仿射变换的
矩阵 (在这里是 warp_mat)将刚刚求得的仿射变换应用到源图像
warpAffine( src, warp_dst, warp_mat, warp_dst.size() );
函数有以下参数:
- src: 输入源图像
- warp_dst: 输出图像
- warp_mat: 仿射变换矩阵
- warp_dst.size(): 输出图像的尺寸
这样我们就获得了变换后的图像! 我们将会把它显示出来. 在此之前, 我们还想要旋转它...
旋转: 想要旋转一幅图像, 你需要两个参数:
- 旋转图像所要围绕的中心
- 旋转的角度. 在OpenCV中正角度是逆时针的
- 可选择: 缩放因子
我们通过下面的代码来定义这些参数:
Point center = Point( warp_dst.cols/2, warp_dst.rows/2 ); double angle = -50.0; double scale = 0.6;
我们利用OpenCV函数 getRotationMatrix2D 来获得旋转矩阵, 这个函数返回一个
矩阵 (这里是 rot_mat)rot_mat = getRotationMatrix2D( center, angle, scale );
现在把旋转应用到仿射变换的输出.
warpAffine( warp_dst, warp_rotate_dst, rot_mat, warp_dst.size() );
最后我们把仿射变换和旋转的结果绘制在窗体中,源图像也绘制出来以作参照:
namedWindow( source_window, CV_WINDOW_AUTOSIZE ); imshow( source_window, src );namedWindow( warp_window, CV_WINDOW_AUTOSIZE ); imshow( warp_window, warp_dst );namedWindow( warp_rotate_window, CV_WINDOW_AUTOSIZE ); imshow( warp_rotate_window, warp_rotate_dst );
等待用户退出程序
waitKey(0);
结果
编译上述例程之后, 我们给出一个图像的路径作为参数. 比如这样一幅图片:
仿射变换后我们获得:

最后, 应用了一个负角度旋转 (记住负角度指的是顺时针) 和基于一个缩放因子的缩放之后, 我们得到:

from: http://www.opencv.org.cn/opencvdoc/2.3.2/html/doc/tutorials/imgproc/table_of_content_imgproc/table_of_content_imgproc.html#table-of-content-imgproc
OpenCV之imgproc 模块. 图像处理(3)霍夫线变换 霍夫圆变换 Remapping 重映射 仿射变换相关推荐
- OpenCV之imgproc 模块. 图像处理(1)图像平滑处理 腐蚀与膨胀(Eroding and Dilating) 更多形态学变换 图像金字塔 基本的阈值操作
图像平滑处理 目标 本教程教您怎样使用各种线性滤波器对图像进行平滑处理,相关OpenCV函数如下: blur GaussianBlur medianBlur bilateralFilter 原理 No ...
- OpenCV之imgproc 模块. 图像处理(5)在图像中寻找轮廓 计算物体的凸包 创建包围轮廓的矩形和圆形边界框 为轮廓创建可倾斜的边界框和椭圆 轮廓矩 多边形测试
在图像中寻找轮廓 目标 在这个教程中你将学到如何: 使用OpenCV函数 findContours 使用OpenCV函数 drawContours 原理 例程 教程的代码在下面给出. 你也可以从 这里 ...
- OpenCV之imgproc 模块. 图像处理(4)直方图均衡化 直方图计算 直方图对比 反向投影 模板匹配
直方图均衡化 目标 在这个教程中你将学到: 什么是图像的直方图和为什么图像的直方图很有用 用OpenCV函数 equalizeHist 对图像进行直方图均衡化 原理 图像的直方图是什么? 直方图是图像 ...
- opencv 霍夫线变换
霍夫线变换 霍夫线变换是一种用来寻找直线的方法. 是用霍夫线变换之前, 首先要对图像进行边缘检测的处理,也即霍夫线变换的直接输入只能是边缘二值图像. 它是如何实现的? 众所周知, 一条直线在图像二维空 ...
- OpenCV霍夫变换:霍夫线变换,霍夫圆变换合辑
本篇文章中,我们一起探讨了OpenCV中霍夫变换相关的知识点,以及了解了OpenCV中实现霍夫线变换的HoughLines.HoughLinesP函数的使用方法,实现霍夫圆变换的HoughCircle ...
- 【OpenCV新手教程之十四】OpenCV霍夫变换:霍夫线变换,霍夫圆变换合辑
本系列文章由@浅墨_毛星云 出品,转载请注明出处. 文章链接: http://blog.csdn.net/poem_qianmo/article/details/26977557 作者:毛星云(浅墨) ...
- 【OpenCV入门教程之十四】OpenCV霍夫变换:霍夫线变换,霍夫圆变换合辑
本系列文章由@浅墨_毛星云 出品,转载请注明出处. 文章链接: http://blog.csdn.net/poem_qianmo/article/details/26977557 作者:毛星云(浅墨) ...
- 花老湿学习OpenCV:霍夫线变换与直线检测
引言: 霍夫变换(Hough Transform)是图像处理中的一种特征提取技术,它通过一种投票算法检测具有特定形状的物体.该过程在一个参数空间中通过计算累计结果的局部最大值得到一个符合该特定形状的集 ...
- Python OpenCV -- 霍夫线变换(十二)
霍夫线变换 1. 霍夫线变换是一种用来寻找直线的方法. 2. 是用霍夫线变换之前, 首先要对图像进行边缘检测的处理,也即霍夫线变换的直接输入只能是边缘二值图像. 实现: 1. 一条直线在图像二维空间 ...
最新文章
- 前端开发我为什么选择cordova
- springcloud alibab + sentinel1.8.1集成文档
- 使用easyexcel导出
- MySQL_前缀索引_建立
- 一款实用的前端截图工具
- js的正则自定义金额输入验证函数
- 深度学习-tensorflow1.x- 理解 经过softmax_cross_entropy_with_logit后 随机梯度下降的过程
- 三维视觉前沿进展年度报告
- Mysql中添加汉字乱码无法识别问题
- Windows Server 2008取消登录前的Ctrl+Alt+Delete组合键操作
- Rust : Attribute 属性 作者:Mike Tang
- 1501_FTA失效树分析简介
- python可以制作大型游戏_python能做游戏吗-python能开发游戏吗
- Python: 使用sphinx生成python项目文档
- 品《阿里巴巴大数据实践-大数据之路》一书(下)
- ToDoList中文版(任务管理软件)v7.1.5.0
- 电视电脑盒子,一机两用,电视秒变电脑
- 软件测试工程师面试如何描述自动化测试是怎么实现的?
- 分享 40 个免费的前端初学者视频教程
- string.h头文件的简单运用