一个实例说明PID 参数整定
PID控制器中的积分对应于图1中误差曲线 与坐标轴包围的面积(图中的灰色部分)。PID控制程序是周期性执行的,执行的周期称为采样周期。计算机的程序用图1中各矩形面积之和来近似精确的积分,图中的TS就是采样周期。

图1 积分运算示意图
每次PID运算时,在原来的积分值的基础上,增加一个与当前的误差值ev(n)成正比的微小部分。误差为负值时,积分的增量为负。 手动调节温度时,积分控制相当于根据当时的误差值,周期性地微调电位器的角度,每次调节的角度增量值与当时的误差值成正比。温度低于设定值时误差为正,积分项增大,使加热电流逐渐增大,反之积分项减小。因此只要误差不为零,控制器的输出就会因为积分作用而不断变化。积分调节的“大方向”是正确的,积分项有减小误差的作用。一直要到系统处于稳定状态,这时误差恒为零,比例部分和微分部分均为零,积分部分才不再变化,并且刚好等于稳态时需要的控制器的输出值,对应于上述温度控制系统中电位器转角的位置L。因此积分部分的作用是消除稳态误差,提高控制精度,积分作用一般是必须的。 PID控制器输出中的积分部分与误差的积分成正比。因为积分时间TI在积分项的分母中,TI越小,积分项变化的速度越快,积分作用越强。 3.PI控制 控制器输出中的积分项与当前的误差值和过去历次误差值的累加值成正比,因此积分作用本身具有严重的滞后特性,对系统的稳定性不利。如果积分项的系数设置得不好,其负面作用很难通过积分作用本身迅速地修正。而比例项没有延迟,只要误差一出现,比例部分就会立即起作用。因此积分作用很少单独使用,它一般与比例和微分联合使用,组成PI或PID控制器。 PI和PID控制器既克服了单纯的比例调节有稳态误差的缺点,又避免了单纯的积分调节响应慢、动态性能不好的缺点,因此被广泛使用。 如果控制器有积分作用(例如采用PI或PID控制),积分能消除阶跃输入的稳态误差,这时可以将比例系数调得小一些。 如果积分作用太强(即积分时间太小),相当于每次微调电位器的角度值过大,其累积的作用会使系统输出的动态性能变差,超调量增大,甚至使系统不稳定。积分作用太弱(即积分时间太大),则消除稳态误差的速度太慢,积分时间的值应取得适中。 4.微分作用 误差的微分就是误差的变化速率,误差变化越快,其微分绝对值越大。误差增大时,其微分为正;误差减小时,其微分为负。控制器输出量的微分部分与误差的微分成正比,反映了被控量变化的趋势。 有经验的操作人员在温度上升过快,但是尚未达到设定值时,根据温度变化的趋势,预感到温度将会超过设定值,出现超调。于是调节电位器的转角,提前减小加热的电流。这相当于士兵射击远方的移动目标时,考虑到子弹运动的时间,需要一定的提前量一样。

图2 阶跃响应曲线
图2中的c (∞)为被控量c (t)的稳态值或被控量的期望值,误差e(t) = c (∞) - c (t)。在图2中启动过程的上升阶段,当 时,被控量尚未超过其稳态值。但是因为误差e(t)不断减小,误差的微分和控制器输出的微分部分为负值,减小了控制器的输出量,相当于提前给出了制动作用,以阻碍被控量的上升,所以可以减少超调量。因此微分控制具有超前和预测的特性,在超调尚未出现之前,就能提前给出控制作用。 闭环控制系统的振荡甚至不稳定的根本原因在于有较大的滞后因素。因为微分项能预测误差变化的趋势,这种“超前”的作用可以抵消滞后因素的影响。适当的微分控制作用可以使超调量减小,增加系统的稳定性。 对于有较大的滞后特性的被控对象,如果PI控制的效果不理想,可以考虑增加微分控制,以改善系统在调节过程中的动态特性。如果将微分时间设置为0,微分部分将不起作用。 微分时间与微分作用的强弱成正比,微分时间越大,微分作用越强。如果微分时间太大,在误差快速变化时,响应曲线上可能会出现“毛刺”。 微分控制的缺点是对干扰噪声敏感,使系统抑制干扰的能力降低。为此可在微分部分增加惯性滤波环节。 5.采样周期 PID控制程序是周期性执行的,执行的周期称为采样周期。采样周期越小,采样值越能反映模拟量的变化情况。但是太小会增加CPU的运算工作量,相邻两次采样的差值几乎没有什么变化,将使PID控制器输出的微分部分接近为零,所以也不宜将采样周期取得过小。 应保证在被控量迅速变化时(例如启动过程中的上升阶段),能有足够多的采样点数,不致因为采样点数过少而丢失被采集的模拟量中的重要信息。 6.PID参数的调整方法 在整定PID控制器参数时,可以根据控制器的参数与系统动态性能和稳态性能之间的定性关系,用实验的方法来调节控制器的参数。有经验的调试人员一般可以较快地得到较为满意的调试结果。在调试中最重要的问题是在系统性能不能令人满意时,知道应该调节哪一个参数,该参数应该增大还是减小。 为了减少需要整定的参数,首先可以采用PI控制器。为了保证系统的安全,在调试开始时应设置比较保守的参数,例如比例系数不要太大,积分时间不要太小,以避免出现系统不稳定或超调量过大的异常情况。给出一个阶跃给定信号,根据被控量的输出波形可以获得系统性能的信息,例如超调量和调节时间。应根据PID参数与系统性能的关系,反复调节PID的参数。 如果阶跃响应的超调量太大,经过多次振荡才能稳定或者根本不稳定,应减小比例系数、增大积分时间。如果阶跃响应没有超调量,但是被控量上升过于缓慢,过渡过程时间太长,应按相反的方向调整参数。 如果消除误差的速度较慢,可以适当减小积分时间,增强积分作用。 反复调节比例系数和积分时间,如果超调量仍然较大,可以加入微分控制,微分时间从0逐渐增大,反复调节控制器的比例、积分和微分部分的参数。 总之,PID参数的调试是一个综合的、各参数互相影响的过程,实际调试过程中的多次尝试是非常重要的,也是必须的。
7 . PID 参数整定实例
由于PID属于无模型控制,调节三个环节的参数会产生什么影响根据控制对象的不同也会有很大差别。你提到的这些结论其实都是根据经验总结出来的。下面通过一个简单的例子说明一下PID控制原理。
1)假设我们面对的系统是一个简单的水箱的液位,要从空箱开始注水直到达到某个高度,而你能控制的变量是注水笼头的开关大小。那么这个简单的数学模型就是
![]()
对于这个简单的系统,我们甚至只需要一个比例环节
![]()
说白了,也就是水箱液位离预定高度远的时候就开大点,离的近的时候就开小点,随着液位逐步接近预定高度逐渐关掉水龙头。
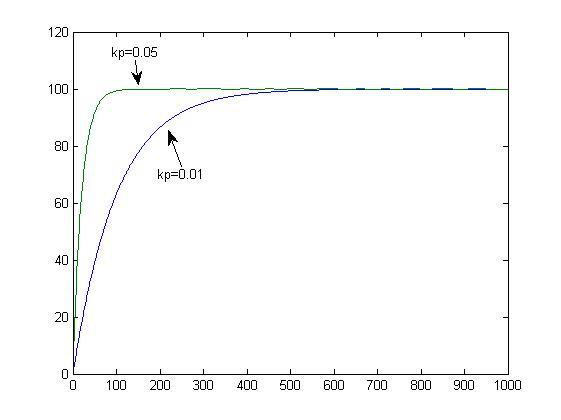
此时,![]() 的大小代表了水龙头的粗细(即出水量大小对液位误差的敏感程度,假设水龙头开度与误差正比关系),越粗调的越快,也就是所谓的"增大比例系数一般会加快系统响应"。如下图:
的大小代表了水龙头的粗细(即出水量大小对液位误差的敏感程度,假设水龙头开度与误差正比关系),越粗调的越快,也就是所谓的"增大比例系数一般会加快系统响应"。如下图:
2)假设咱们这个水箱不仅仅是装水的容器了,还需要持续稳定的给用户供水。
那这个系统的数学模型就需要增加一项:
![]() ,这里这个c是个正的常数。
,这里这个c是个正的常数。
这时候我们发现如果控制器只有一个比例环节,那么当系统稳定,也就是![]() 的时候,恰好
的时候,恰好![]() 。e在系统稳定时不为0,液位离我们想要的高度总是差那么一点,这也就是所谓的稳态误差,或者叫静差。
。e在系统稳定时不为0,液位离我们想要的高度总是差那么一点,这也就是所谓的稳态误差,或者叫静差。
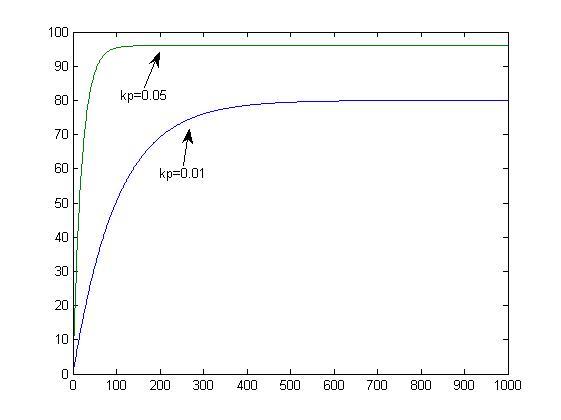
3) 从上面的式子![]() 大家可以看出来,kp再大那也只是个分母,不可能把e变成0的。老是调不到预定位置老板是会骂人的,这可咋办?
大家可以看出来,kp再大那也只是个分母,不可能把e变成0的。老是调不到预定位置老板是会骂人的,这可咋办?
然后有人就想到,第二小节里头那个水箱跟第一小节的相比,不就是多了一个漏水的窟窿么。它漏多少我给它补多少,那不就成了第一小节里的简单系统了么。靠谁补呢?积分环节这时候就派上用场了。
我们把之前的控制器变成比例环节+积分环节:
积分环节的意义就相当于你增加了一个水龙头,这个水龙头的开关规则是水位比预定高度低就一直往大了拧,比预定高度高就往小了拧。如果漏水速度不变,那么总有一天这个水龙头出水的速度恰好跟漏水的速度相等了,系统就和第一小节的那个一样了。那时,静差就没有了。这就是所谓的积分环节可以消除系统静差。
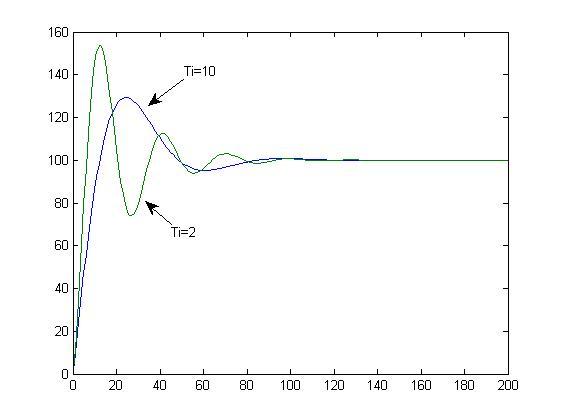
4)啥叫积分时间常数呢?一般PID控制里,表示积分环节敏感度的那个系数![]() , 这个Ti就是积分时间常数。从这个式子我们可以看出,积分时间常数越大,积分环节系数就越小,积分环节就越不敏感(也就是第二个水龙头越细)。
, 这个Ti就是积分时间常数。从这个式子我们可以看出,积分时间常数越大,积分环节系数就越小,积分环节就越不敏感(也就是第二个水龙头越细)。
当咱们只有一个比例环节的水龙头注水的时候,是不会注水注多的,因为离得越近水龙头关的越小啊。
但是当咱们用俩水龙头注水的时候,在没到预定高度前第二个积分环节的水龙头可以一直在往大了拧的,那当到达预定高度的时候它恰好拧到最大,自然而然就会注水注多了。而多出去的这部分水就叫做“超调”。第二个水龙头越粗,多注的水就会越多,它调到恰好等于漏水速度的时间就会越快,但同时会多更多波折。
5)接下来我们来看点有意思的东西。还是上面这个系统,假如我们选用相同的积分时间常数,但是选择不同的比例系数会如何呢?
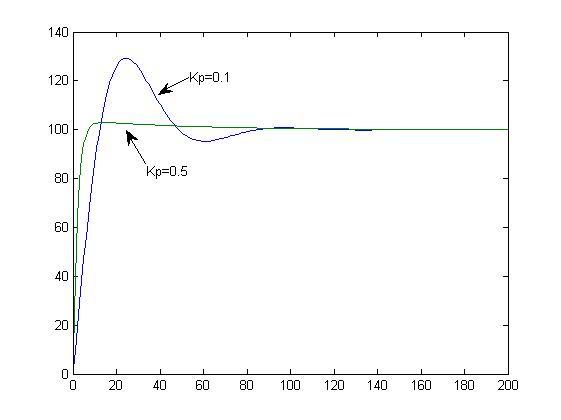
其实上面这幅图很好解释,小节4里我们说明了PI控制器超调出现原因是积分这个水龙头在到达目标液位时也恰好开到了最大。而比例这个水龙头越粗,那么它在超出目标液位时对超调的抑制也就越明显。
6) 在上面的系统中,我们假设用户用水的固定的一个值,但是实际情况中用户的用水量往往是变化的。假如我们的系统是![]() 呢?
呢?
来分析一下:
我们的控制目标是让![]() ,系统误差的定义是:
,系统误差的定义是:![]() ;
;
那么误差状态方程就是![]()
上面我们设定的控制目标是个常数,所以![]() ;
;
那么![]()
从上面这个式子我们可以看出,当e=0时,![]() 不再变化,而c(t)是始终变化的。
不再变化,而c(t)是始终变化的。
那么此时de不恒为零,也就是说e不恒为零。
也就是说,当c变成c(t)的时候,e=0就不再是系统的稳定平衡点了,经典意义上系统不再稳定。
7)这里加一个微分环节D变成PID控制会不会让系统重新稳定呢?
当加入微分环节,![]()
那么![]()
“微分环节主要作用是在响应过程中抑制偏差向任何方向的变化”
“微分常数不能过大,否则会使响应过程提前制动,延长调节时间”
但是,无论如何选取微分参数
——————————————————————————————————————————
微分环节想了很久,最后还是觉得想到的例子都不够清楚准确,还是用式子更顺手一些。
希望大家不要死记口诀,多用所学到的控制理论来针对具体问题具体分析。
——————————————————————————————————————————
一个实例说明PID 参数整定相关推荐
- matlab求系统根轨迹代码_根轨迹法、PID参数整定和matlab指令计算
收获 (1)理解根轨迹的概念及其在控制系统设计中的作用: (2)手绘根轨迹草图,以及如何使用极端及绘制根轨迹: (3)熟悉在反馈控制系统中应用广泛的关键部件:PID控制器: (4)理解根轨迹在参数设计 ...
- 我的四轴专用PID参数整定方法及原理
给四轴调了好久的PID,总算是调好了,现分享PID参数整定的心得给大家,还请大家喷的时候手下留情. 首先说明一下,这篇文章的主旨并不是直接教你怎么调,而是告诉你这么调有什么道理,还要告诉大家为什么'只 ...
- 机器人控制——PID参数整定
(1)首先选择一个合适的并且尽量短的采样时间让系统工作: (2)首先加入比例环节,调节比例系数,直到系统的输出出现临界振荡: (3)若单独的比例环节不能满足设计要求,则此时加入积分环节,调整好的比例系 ...
- 学习制作平衡小车:(四)PID学习、位置PID参数整定以及匿名上位机显示
一.PID学习 PID的知识网上有很多教学讲解的非常清楚,可以再参考学习[平衡小车之家]的视频教程. 二.位置PID学习 位置PID控制公式为:Pwm=Kp*e(K)+Ki*∑e(K)+Kd[e(K) ...
- 基于遗传算法的PID参数整定研究(三)
基于遗传算法的PID参数整定研究 在获得对象模型的基础上设计PID参数时常用的原理,经典的有经验试凑法.临界比例度法.极点配置原理.零极点相消原理.幅相裕度法等:现代的则往往借助于计算机,利用最优化方 ...
- 【控制理论】——控制系统分类PID算法简介PID参数整定PID上位机通信协议
目录 前言 一.PID算法 1.控制系统分类&参数&信号 2.PID算法简介 二.PID参数整定 三.PID上位机通信协议 1.数据帧&协议调试 2.协议代码实现 拓展: ...
- 基于入门级粒子群算法的PID参数整定(MATLAB2016b-simulink)(超详细01)
PID算法作为工业或日常生活中常用的控制算法,想必大家都不陌生,依靠误差反馈来消除误差,关于PID的原理部分相比看这篇博客的同学应该都十分清楚,有不清楚的同学可以百度或知网搜索.PID算法的应用程度很 ...
- 我的四轴专用PID参数整定方法及原理---超长文慎入(转)
给四轴调了好久的PID,总算是调好了,现分享PID参数整定的心得给大家,还请大家喷的时候手下留情. 首先说明一下,这篇文章的主旨并不是直接教你怎么调,而是告诉你这么调有什么道理,还要告诉大家为什么'只 ...
- 自动控制原理PID参数整定的Matlab实现
以一道题为例介绍调节PID控制器系数的方法,有:试凑法(Trial-and-Error Method).齐格勒-尼科尔斯校正规则(Ziegler and Nichols First Method. ...
最新文章
- C# Windows基础拾遗01—线条绘制篇
- Spring入门详细教程(三)
- js 判断字符串中是否包含某个字符串
- OpenGL编程指南14:混合半透明Blend
- CST光源控制卡简单操作C#程序
- c++ pat 乙级 -------1002 读入一个正整数 n,计算其各位数字之和,用汉语拼音写出和的每一位数字。
- nginx资源定向 css js路径问题
- 信息学奥赛一本通(1038:苹果和虫子)
- C#设计模式之十一享元模式(Flyweight Pattern)【结构型】
- Docker下ETCD集群搭建
- Ubuntu 15.10系统安装后要做的15件事
- 5、lvs使用进阶(01)
- Nginx与tomcat组合的简单使用
- sitemap死链检测工具-免费sitemap死链检测抓取工具
- 机器学习 | 特征选择(Feature Selection)
- 反编译class文件并重新编译的方法
- 显示更清晰,书写更专业:汉王手写电纸本N10发布
- udc分类号查询 计算机技术,论文的分类号和udc_udc_论文分类号查询系统
- 解析微信小程序码的地址scene
- Python编写微信打飞机小游戏(二)