【唐宇迪】opencv实战学习
图像基本操作
数据读取-图像
- cv2.IMREAD_COLOR:彩色图像
- cv2.IMREAD_GRAYSCALE:灰度图像
opencv对于读进来的图片的通道排列是BGR,而不是主流的RGB!谨记!
#opencv读入的矩阵是BGR,如果想转为RGB,可以这么转
img = cv2.imread('1.jpg')
img = cv2.cvtColor(img4,cv2.COLOR_BGR2RGB)
import cv2
import matplotlib.pyplot as plt
import numpy as np
%matplotlib inline
# 由于 %matplotlib inline 的存在,当输入plt.plot(x,y_1)后,不必再输入 plt.show(),图像将自动显示出来img = cv2.imread('pic/cat.jpg')
img # 值都是在0~255之间,0是白色,255是黑色。共有3个维度,[h, w, c]
array([[[161, 166, 169],[110, 115, 118],[110, 115, 118],...,[ 93, 103, 113],[101, 111, 121],[106, 116, 126]],[[162, 167, 170],[130, 135, 138],[114, 119, 122],...,[ 92, 102, 112],[ 98, 108, 118],[103, 113, 123]],[[165, 170, 173],[158, 163, 166],[138, 143, 146],...,[ 95, 105, 115],[ 98, 108, 118],[102, 112, 122]],...,[[200, 209, 218],[178, 187, 196],[147, 156, 165],...,[178, 187, 200],[151, 160, 173],[104, 113, 126]],[[234, 243, 252],[197, 206, 215],[151, 160, 169],...,[167, 176, 189],[182, 193, 207],[159, 170, 184]],[[151, 160, 169],[130, 139, 148],[111, 120, 129],...,[133, 142, 155],[184, 195, 209],[184, 195, 209]]], dtype=uint8)
# 图像的显示,也可以创建多个窗口
cv2.imshow('img', img)
# 等待时间,毫秒级,0表示任意键终止
cv2.waitKey(0)
cv2.destroyAllWindows()
def cv_show(name, img): # 定义一个函数,使得可以显示图片并且任意键关闭cv2.imshow(name, img)cv2.waitKey(0)cv2.destroyAllWindows()
cv_show('img',img)
img.shape # 查看图像的大小,3表示是RGB这3个颜色通道
(720, 720, 3)
# 以灰度图读取进来
gray_img = cv2.imread('pic/cat2.jpg', cv2.IMREAD_GRAYSCALE)
gray_img
array([[ 62, 125, 105, ..., 242, 168, 173],[192, 128, 83, ..., 234, 214, 171],[ 88, 124, 127, ..., 228, 211, 170],...,[126, 145, 118, ..., 96, 95, 122],[133, 160, 152, ..., 94, 98, 154],[157, 173, 170, ..., 120, 119, 135]], dtype=uint8)
cv_show('gray_img', gray_img)
gray_img.shape # 只有两个维度,只有1个颜色通道
(720, 720)
cv2.imwrite('pic/gray_cat.jpg', gray_img) # 保存图片
True
type(gray_img) # 是numpy中ndarray类型
numpy.ndarray
gray_img.size # 像素点个数=720*720*1
518400
gray_img.dtype # 元素数据类型
dtype('uint8')
# 批量读取并保存import osdef convert(input_dir, output_dir):for filename in os.listdir(input_dir):path = input_dir + "/" + filename # 获取文件路径print("doing... ", path)file_name, file_extension = os.path.splitext(filename)img = cv2.imread(path)img = cv2.resize(img, (0,0), fx=0.8, fy=0.8)cv2.imwrite(output_dir+file_name+'_small'+file_extension, img )print('saving',output_dir+file_name+'_small'+file_extension)input_dir = "pic/resize" # 输入数据文件夹
output_dir = "pic/" # 输出数据文件夹
convert(input_dir, output_dir)
doing... pic/resize/cat2_small.jpg
saving pic/cat2_small_small.jpg
doing... pic/resize/cat3_small.jpg
saving pic/cat3_small_small.jpg
doing... pic/resize/cat_small.jpg
saving pic/cat_small_small.jpg
doing... pic/resize/dog2_small.jpg
saving pic/dog2_small_small.jpg
doing... pic/resize/dog3_small.jpg
saving pic/dog3_small_small.jpg
doing... pic/resize/dog_small.jpg
saving pic/dog_small_small.jpg
doing... pic/resize/Lenna_small.png
saving pic/Lenna_small_small.png
数据读取-视频
- cv2.VideoCapture可以捕获摄像头有,用数字来控制不同的设备,例如0,1
- 如果是视频文件,直接指定好路径即可。
基本上1s内30帧,人眼就看不出来卡顿了。
人脸识别不是对于视频去做的,也是对于图像去做的。
read函数返回2个类型,第一个是bool类型,第二个是图像,第一个open随便改名都可以
vc = cv2.VideoCapture(r'D:\SoftWareInstallMenu\EVCapture\A_EVsavefile\Latex使用方法.mp4')# 检查是否打开正确
if vc.isOpened():open, frame = vc.read() # open表示是否正确打开,frame是第一帧的图像
else:open = False
while open:ret, frame = vc.read()if frame is None:breakif ret == True:gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY) # 转成一个灰度图cv2.imshow('result', gray)if cv2.waitKey(10) & 0xFF == 27: # 10表示切换到下一帧的时间,27表示退出键break
vc.release()
cv2.destroyAllWindows()
截取部分图像数据
ROI:感兴趣的区域
切分:b, g, r = img.split(img)
组合:img = cv2.merge((b, g, r))
只保留一种颜色通道
img = cv2.imread('pic/cat.jpg') # 原图的shape是(720, 720, 3)
cat = img[200:400, 200:400]
cv_show('cat',cat)
颜色通道提取
b, g, r = cv2.split(img) # 把3个颜色通道单独切分出来
b
array([[161, 110, 110, ..., 93, 101, 106],[162, 130, 114, ..., 92, 98, 103],[165, 158, 138, ..., 95, 98, 102],...,[200, 178, 147, ..., 178, 151, 104],[234, 197, 151, ..., 167, 182, 159],[151, 130, 111, ..., 133, 184, 184]], dtype=uint8)
# 或者写成这样,效果也是一样的
b = img[:, :, 0]
b
array([[161, 110, 110, ..., 93, 101, 106],[162, 130, 114, ..., 92, 98, 103],[165, 158, 138, ..., 95, 98, 102],...,[200, 178, 147, ..., 178, 151, 104],[234, 197, 151, ..., 167, 182, 159],[151, 130, 111, ..., 133, 184, 184]], dtype=uint8)
b.shape # b, g, r 的shape都是一样的,跟图像大小,切分出来不会发生改变
(720, 720)
img2 = cv2.merge((b, g, r))
cv_show('img2',img2)
# 只保留B通道颜色,其余通道颜色置为0
cur_img = img.copy()
cur_img[:, :, 1] = 0
cur_img[:, :, 2] = 0
cv_show('cur_img.png', cur_img)
边界填充
import matplotlib.pyplot as plt
img = cv2.imread('pic/cat.jpg')
img = cv2.cvtColor(img,cv2.COLOR_BGR2RGB) # 因为cv2读取的图片是BGR的,所以这里转成RGB才为真实颜色
plt.imshow(img)
<matplotlib.image.AxesImage at 0x124c8f23948>
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-KXF63my6-1647232784475)(output_31_1.png)]
top_size, bottom_size, left_size, right_size = (50, 50, 50, 50)
replicate = cv2.copyMakeBorder(img, top_size, bottom_size, left_size, right_size, borderType = cv2.BORDER_REPLICATE)
reflect = cv2.copyMakeBorder(img, top_size, bottom_size, left_size, right_size, cv2.BORDER_REFLECT)
reflect101 = cv2.copyMakeBorder(img, top_size, bottom_size, left_size, right_size, cv2.BORDER_REFLECT_101)
wrap = cv2.copyMakeBorder(img, top_size, bottom_size, left_size, right_size, cv2.BORDER_WRAP)
constant = cv2.copyMakeBorder(img, top_size, bottom_size, left_size, right_size, cv2.BORDER_CONSTANT, value=0) #常量设为0,边界全为黑色
import matplotlib.pyplot as plt
plt.subplot(2,3,1), plt.imshow(img), plt.title('ORIGINAL')
plt.subplot(232), plt.imshow(replicate), plt.title('REPLICATE')
plt.subplot(233), plt.imshow(reflect), plt.title('REFLECT')
plt.subplot(234), plt.imshow(reflect101), plt.title('REFLECT_101')
plt.subplot(235), plt.imshow(wrap), plt.title('WRAP')
plt.subplot(236), plt.imshow(constant), plt.title('CONSTANT')
(<AxesSubplot:title={'center':'CONSTANT'}>,<matplotlib.image.AxesImage at 0x124ccbfa6c8>,Text(0.5, 1.0, 'CONSTANT'))
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-RZhSMq58-1647232784476)(output_33_1.png)]
- BORDER_REFLICATE:复制法,也就是赋值最边缘像素
- BORDER_REFLECT:反射法,对感兴趣的图像中的像素在两边进行复制,例如fedcba|abcdefgh|hgfedcb
- BORDER_REFLECT_101:反射法,也就是以最边缘像素为轴,对称,gfedcb|abcdefgh|gfedcba
- BORDER_WRAP:外包装法cdefgh|abcdefgh|abcdefg
- BORDER_CONSTANT:常量法,常数值填充。
数值计算
- cv2中的add加法,当越界0~255时,就取最大值255
img_cat = cv2.imread('pic/cat.jpg')
img_dog = cv2.imread('pic/dog3.jpg')img_cat[:5, :, 0] # 只打印前5行,B通道的数据进行查看
array([[161, 110, 110, ..., 93, 101, 106],[162, 130, 114, ..., 92, 98, 103],[165, 158, 138, ..., 95, 98, 102],[154, 156, 144, ..., 96, 98, 101],[119, 134, 136, ..., 94, 99, 103]], dtype=uint8)
img_cat2 = img_cat + 10 # 所有位置的元素值都+10,但是shape没有发生变化
img_cat2[:5, :, 0]
array([[171, 120, 120, ..., 103, 111, 116],[172, 140, 124, ..., 102, 108, 113],[175, 168, 148, ..., 105, 108, 112],[164, 166, 154, ..., 106, 108, 111],[129, 144, 146, ..., 104, 109, 113]], dtype=uint8)
cv_show('img_cat2',img_cat2)
# 相当于%256,numpy的加法
(img_cat + img_cat2)[:5, :, 0]
array([[ 76, 230, 230, ..., 196, 212, 222],[ 78, 14, 238, ..., 194, 206, 216],[ 84, 70, 30, ..., 200, 206, 214],[ 62, 66, 42, ..., 202, 206, 212],[248, 22, 26, ..., 198, 208, 216]], dtype=uint8)
# cv2中的add加法,当越界0~255时,就取最大值255
cv2.add(img_cat, img_cat2)[:5, : ,0]
array([[255, 230, 230, ..., 196, 212, 222],[255, 255, 238, ..., 194, 206, 216],[255, 255, 255, ..., 200, 206, 214],[255, 255, 255, ..., 202, 206, 212],[248, 255, 255, ..., 198, 208, 216]], dtype=uint8)
一些不严谨的理解
- 当有的参数写成
-1时,就默认是保留所有信息。 - 颜色值区间是0-255,也就是黑-白,中间值127就代表是灰色。
- cv2.imread(filepath,flags),参考博客:cv2 imread()函数。flags=0表示读入灰度图像,等价于cv2.IMREAD_GRAYSCALE;默认flags=1,表示读入彩色图像,等价于cv2.IMREAD_COLOR;flags=-1,读入包括alpha通道(又称A通道)的完整图片,等价于cv2.IMREAD_UNCHANGED。
- 好像只要是坐标,都是先表示的列号,再表示的行。
图像处理
图像融合
- shape值必须相同,不同的话,就需要进行resize,resize中有点奇怪,高宽的位置是变换的
- cv2.AddWeighted(src1,a,src2,b,c) 表示“结果图像=图像1×系数1+图像2×系数2+亮度调节量”,c一定要写,至少写成0
img_cat + img_dog
---------------------------------------------------------------------------ValueError Traceback (most recent call last)~\AppData\Local\Temp/ipykernel_18220/4029550109.py in <module>
----> 1 img_cat + img_dogValueError: operands could not be broadcast together with shapes (720,720,3) (638,563,3)
img_cat = cv2.resize(img_cat, (563,638))
img_cat.shape
plt.imshow((img_cat + img_dog))
res = cv2.addWeighted(img_cat, 0.4, img_dog, 0.6, 0) # 最后面那个0是指偏置,再另外加的值,应该是有一种调亮的效果
plt.imshow(res)
res = cv2.resize(img_cat, (0, 0), fx=3, fy=3) # resize时,没有指定具体大小,而是指定变长变宽的倍数
plt.imshow(res)
图像阈值
ret, dst = cv2.threshold(src, thresh, maxval, type)
ret:输入的阈值thresh,通常没用,可以用_代替;dst:二值化后的图像。
等价于:_ , dst = cv2.threshold (源图片, 阈值, 填充色, 阈值类型)
- src:输入图,只能输入单通道图像,通常来说为灰度图
- dst:输出图
- thresh:阈值,通常为127
- maxval:当像素值超过了阈值(或者小于阈值,根据type来决定),所赋予的值
- type:二值化操作的类型,包含以下5种类型:
- cv2.THRESH_BINARY 超过阈值部分取maxval(最大值),否则取0
- cv2.THRESH_BINARY_INV 是THRESH_BINARY的反转
- cv2.THRESH_TRUNC 大于阈值部分设为阈值,否则不变
- cv2.THRESH_TOZERO 大于阈值部分不改变,否则设为0
- cv2.THRESH_TOZERO_INV 是THRESH_TOZERO的反转
可以再看一下这个链接:图像阈值处理cv2.threshold()函数(python)
cv2.THRESH_BINARY将一个灰色的图片,变成要么是白色要么就是黑色。(大于规定thresh值就是设置的最大值(常为255,也就是白色))
还有这个链接也不错:opencv: 阈值处理(cv2.threshold) 探究(图示+源码)
img_gray = cv2.imread('pic/cat.jpg', cv2.IMREAD_GRAYSCALE) # 以灰度图读进来
ret, thresh1 = cv2.threshold(img_gray, 127, 255, cv2.THRESH_BINARY)
ret, thresh2 = cv2.threshold(img_gray, 127, 255, cv2.THRESH_BINARY_INV)
ret, thresh3 = cv2.threshold(img_gray, 127, 255, cv2.THRESH_TRUNC)
ret, thresh4 = cv2.threshold(img_gray, 127, 255, cv2.THRESH_TOZERO)
ret, thresh5 = cv2.threshold(img_gray, 127, 255, cv2.THRESH_TOZERO_INV)
cmap的知识可以参考一下这个博客:Matplotlib的imshow()函数颜色映射(cmap的取值)
常用的应该就是’gray’吧
这是官网地址:Choosing Colormaps in Matplotlib
import matplotlib.pyplot as plt
titles = ['Original Image', 'Binary', 'Binary_inv', 'Trunc', 'Tozero', 'Tozero_inv']
images = [img_gray, thresh1, thresh2, thresh3, thresh4, thresh5]for i in range(6):plt.subplot(2,3,i+1)plt.imshow(images[i], cmap = 'gray') # cmap加上这个'gray'参数,是为了显示灰色图,cmap是颜色散射值plt.title(titles[i])plt.xticks([]) # 数组类型,用于设置X轴刻度间隔.这里设置为空,则表示不显示刻度plt.yticks([])
plt.show()
图像平滑处理
没有找到噪声图片,就只有手动做添加照片了
- 经典的lena照片下载地址:wiki-Lenna-512×512.png
- csdn上添加椒盐噪声、高斯噪声、随机噪声的教程:Python+OpenCV批量给图片加噪声
random.randint(0,3) 表示返回0~3之间的任意整数,左闭右闭
np.arange(0,3) 表示生成[ 0 1 2 ]数组,左闭右开
range(0,3) 表示范围0~2之间的数据
添加噪声
# 导入头文件
import os
import cv2
import numpy as np
import random
# 添加椒盐噪声
def sp_noise(noise_img, proportion):'''添加椒盐噪声proportion的值表示加入噪声的量,可根据需要自行调整return: img_noise'''height, width = noise_img.shape[0], noise_img.shape[1]#获取高度宽度像素值num = int(height * width * proportion) #一个准备加入多少噪声小点for i in range(num):w = random.randint(0, width - 1) # 任意地方添加的0黑点,255白点h = random.randint(0, height - 1)if random.randint(0, 1) == 0:noise_img[h, w] = 0else:noise_img[h, w] = 255return noise_img
# 添加高斯噪声
def gaussian_noise(img, mean, sigma):'''此函数用将产生的高斯噪声加到图片上传入:img : 原图mean : 均值sigma : 标准差返回:gaussian_out : 噪声处理后的图片'''# 将图片灰度标准化img = img / 255# 产生高斯 noisenoise = np.random.normal(mean, sigma, img.shape)# 将噪声和图片叠加gaussian_out = img + noise# 将超过 1 的置 1,低于 0 的置 0gaussian_out = np.clip(gaussian_out, 0, 1)# 将图片灰度范围的恢复为 0-255gaussian_out = np.uint8(gaussian_out*255)# 将噪声范围搞为 0-255# noise = np.uint8(noise*255)return gaussian_out# 这里也会返回噪声,注意返回值
# 添加随机噪声
def random_noise(image,noise_num):'''添加随机噪点(实际上就是随机在图像上将像素点的灰度值变为255即白色)param image: 需要加噪的图片param noise_num: 添加的噪音点数目return: img_noise'''# 参数image:,noise_num:img_noise = image# cv2.imshow("src", img)rows, cols, chn = img_noise.shape# 加噪声for i in range(noise_num):x = np.random.randint(0, rows)#随机生成指定范围的整数y = np.random.randint(0, cols)img_noise[x, y, :] = 255return img_noise
# 读取并保存
def convert(input_dir, output_dir):for filename in os.listdir(input_dir):path = input_dir + "/" + filename # 获取文件路径print("doing... ", path)noise_img = cv2.imread(path)#读取图片img_noise = gaussian_noise(noise_img, 0, 0.12) # 高斯噪声cv2.imwrite(output_dir+'/gaussian_'+filename,img_noise )img_noise = sp_noise(noise_img, 0.025)# 椒盐噪声cv2.imwrite(output_dir+'/sp_'+filename,img_noise )img_noise = random_noise(img_noise, 500)# 随机噪声cv2.imwrite(output_dir+'/random_'+filename,img_noise )
input_dir = "pic/input" # 输入数据文件夹
output_dir = "pic/picout" # 输出数据文件夹
convert(input_dir, output_dir)
平滑处理
卷积核会与图像中相应大小的像素点依次做内积。例如3×3的卷积核,则会与图像中3×3个像素点依次做内积操作,然后再做求均值、中位数等操作。
通常情况下,卷积核的大小是一个奇数,例如3,5等。
- 均值滤波,简单的平均卷积操作
- 方框滤波,基本和均值一样,可以选择归一化,当归一化为true时,则效果与blur相同
import cv2
import numpy as np
import matplotlib.pyplot as pltimg = cv2.imread('pic/picout/sp_Lenna.png')
# img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB) # 将BGR图像转为RGB图像def cv_show(name, img):cv2.imshow(name, img)cv2.waitKey(0)cv2.destroyAllWindows()cv_show('img',img)
# 均值滤波
# 简单的平均卷积操作
blur = cv2.blur(img, (3,3)) # 采用3×3的卷积核
cv_show('blur', blur)# 就是大小为3*3且元素全为1的矩阵与图像的9个像素点做内积,相当于就是把选中的9个值加起来,再÷9,求得均值
# 方框滤波
# 基本和均值一样,可以选择归一化,当归一化为true时,则效果与blur相同;当为False时,就少了÷9的步骤,所以值就会越界(0~255)
# 越界值就直接取最大值255,所以会有很多地方为白色(255)
box = cv2.boxFilter(img, -1, (3,3), normalize=False) # -1表示颜色通道数与图像一致,通常情况下不要更改
cv_show('box', box)
# 高斯滤波(好像是有点类似于0-1正态分布)
# 高斯模糊的卷积核里的数值是满足高斯分布,相当于更重视中间的,离自己越近的影响越大,相当于给自己构造了一个权重矩阵
# (5,5)为滤波器的大小;1为滤波器的标准差,如果标准差这个参数设置为0,则程序会根据滤波器大小自动计算得到标准差。
# 高斯滤波器模板的生成最重要的参数就是高斯分布的标准差σ
# σ较大,则生成的模板的各个系数相差就不是很大,比较类似均值模板,对图像的平滑效果比较明显
gaussian = cv2.GaussianBlur(img, (3,3), 1)
cv_show('gaussian', gaussian)
# 中值滤波
# 相当于用中值替代
median = cv2.medianBlur(img, 5)
cv_show('median', median)
# 展示所有的
res = np.hstack((img, blur, gaussian, median))
res = cv2.resize(res, (0,0), fx=0.5, fy=0.5)
cv_show('all pics', res)
形态学
腐蚀操作
拿erosion.png举例,背景都是黑色,爱心是白色的,且毛刺也是白色的。
腐蚀 cv2.erode():当卷积核圈住的范围内有黑色,就将该范围内的全变为黑色,所以会缩小一圈。(有不想要的像素就全不要)
膨胀 cv2.dilate():相反,只要卷积核圈住的范围内有白色,就将该范围内全置为白色,所以会变大一圈。(有想要的像素就全要)
去掉毛刺,往里面缩小,腐蚀次数越多,图像变得越小。跟滤波很像。
kernel的设置还是挺重要的,设置得太大的化,形态会发生改变。
img = cv2.imread('pic/erosion.png') # 大爱心kernel = np.ones((3,3), np.uint8)erosion1 = cv2.erode(img, kernel, iterations = 1) # iterations腐蚀次数
erosion2 = cv2.erode(img, kernel, iterations = 2) # iterations腐蚀次数
erosion3 = cv2.erode(img, kernel, iterations = 3) # iterations腐蚀次数res = np.hstack((img, erosion1, erosion2, erosion3))
res = cv2.resize(res, (0,0), fx=0.6, fy= 0.6)
cv_show('res', res)
img = cv2.imread('pic/erosion2.png') # 线条字母kernel = np.ones((3,3), np.uint8)erosion1 = cv2.erode(img, kernel, iterations = 1) # iterations腐蚀次数
erosion2 = cv2.erode(img, kernel, iterations = 2) # iterations腐蚀次数
erosion3 = cv2.erode(img, kernel, iterations = 3) # iterations腐蚀次数res = np.hstack((img, erosion1, erosion2, erosion3))
res = cv2.resize(res, (0,0), fx=0.6, fy= 0.6)
cv_show('res', res)
膨胀操作
图像会变得越来越大
当图像中是一些线条数据时,为了消去不必要的毛刺,先进行腐蚀操作消去毛刺,但是数据会受到一些损害变得很细。所以还需要再进行膨胀操作。
img = cv2.imread('pic/erosion2.png') # 线条字母kernel = np.ones((3,3), np.uint8)# 腐蚀+膨胀
erosion1 = cv2.erode(img, kernel, iterations = 1)
dilate1 = cv2.dilate(erosion1, kernel, iterations = 1) erosion2 = cv2.erode(img, kernel, iterations = 2)
dilate2 = cv2.dilate(erosion2, kernel, iterations = 2)erosion3 = cv2.erode(img, kernel, iterations = 1)
dilate3 = cv2.dilate(erosion3, kernel, iterations = 3) res = np.hstack((img, dilate1, dilate2, dilate3))
res = cv2.resize(res, (0,0), fx=0.6, fy= 0.6)
cv_show('res', res)
开运算和闭运算
其实就是将上面的腐蚀和膨胀结合在一起了
cv2.morphologyEx(img, cv2.MORPH_OPEN, kernel) # 开运算,先腐蚀再膨胀
cv2.morphologyEx(img, cv2.MORPH_CLOSE, kernel) # 闭运算,先膨胀再腐蚀
# 开运算
img = cv2.imread('pic/erosion2.png')
kernel = np.ones((5,5), dtype = np.uint8)opening = cv2.morphologyEx(img, cv2.MORPH_OPEN, kernel)cv_show('opening', cv2.resize(opening, (0,0), fx=0.6, fy=0.6))
# 闭运算
img = cv2.imread('pic/erosion2.png')
kernel = np.ones((5,5), dtype = np.uint8)closing = cv2.morphologyEx(img, cv2.MORPH_CLOSE, kernel)cv_show('closing', cv2.resize(closing, (0,0), fx=0.6, fy=0.6))
梯度运算
梯度=膨胀-腐蚀
cv2.morphologyEx(img, cv2.MORPH_GRADIENT, kernel)
# 梯度=膨胀-腐蚀
img = cv2.imread('pic/erosion.png')
kernel = np.ones((5,5), dtype = np.uint8)dilate = cv2.dilate(img, kernel, iterations = 5) # 膨胀
erosion = cv2.erode(img, kernel, iterations = 5) # 腐蚀
gradient = cv2.morphologyEx(img, cv2.MORPH_GRADIENT, kernel) # 梯度运算res = np.hstack((img, dilate, erosion, gradient))
cv_show('res', cv2.resize(res,(0,0),fx=0.6,fy=0.6))
礼帽与黑帽
- 礼帽 = 原始输入 - 开运算结果 ,也就是只剩下那些毛刺了。cv2.morphologyEx(img, cv2.MORPH_TOPHAT, kernel)
- 黑帽 = 闭运算 - 原始输入,剩下毛刺的轮廓(感觉是出现毛刺的位置点)。cv2.morphologyEx(img, cv2.MORPH_BLACKHAT, kernel)
# 礼帽
img = cv2.imread('pic/erosion2.png')
kernel = np.ones((5,5), dtype=np.uint8)tophat = cv2.morphologyEx(img, cv2.MORPH_TOPHAT, kernel)
cv_show('tophat', tophat)
# 黑帽
blackhat = cv2.morphologyEx(img, cv2.MORPH_BLACKHAT, kernel)
cv_show('blackhat', blackhat)
# 原图、礼帽、黑帽
res = np.hstack((img, tophat, blackhat))
cv_show('res', cv2.resize(res, (0,0), fx=0.6, fy=0.6))
图像梯度
Sobel算子
Gx=[−10+1−20+2−10+1]∗Aand Gy=[−1−2−1000+1+2+1]∗A\mathbf{G}_{x}=\left[\begin{array}{ccc} -1 & 0 & +1 \\ -2 & 0 & +2 \\ -1 & 0 & +1 \end{array}\right] * \mathbf{A} \quad \text { and } \quad \mathbf{G}_{y}=\left[\begin{array}{ccc} -1 & -2 & -1 \\ 0 & 0 & 0 \\ +1 & +2 & +1 \end{array}\right] * \mathbf{A} Gx=⎣⎡−1−2−1000+1+2+1⎦⎤∗A and Gy=⎣⎡−10+1−20+2−10+1⎦⎤∗A
- 感觉梯度就是边缘的意思,通常是用来进行边缘检测的
- GxG_xGx表示计算水平方向的像素差值,右 - 左
- GyG_yGy表示计算竖直方向的像素差值,下 - 上
- 用 cv2.CV_64F 保留负数,再用 取绝对值。不然会出现只有一半的边缘被提取出来。opencv默认范围是0~255,超出范围就设为0或255。
- 不要一次性水平、竖直都去提取边缘,这样提取的效果不好。应该先水平提取再竖直提取,再用 进行图像融合
dst = cv2.Sobel(src, ddepth, dx, dy, ksize)
- ddepth:图像的深度,通常设为-1
- dx和dy分别表示水平和竖直方向,通常设为dx=0,dy=1 或者 dx=1,dy=0,不要设置成dx=1,dy=1
- ksize是Sobel算子的大小,通常设为3
# 先用大爱心提取边缘
img = cv2.imread('pic/erosion.png')
img = cv2.resize(img, (0,0), fx=0.6, fy=0.6)
cv_show('img',img)
白到黑是正数,黑到白就是负数了,所有的负数都会被截断为0,所以要取绝对值
cv2.CV_64F表示64位浮点数,写成cv2.CV_64FC3中的C3表示3通道。好像默认为C1,cv2.CV_64F <==> cv2.CV_64FC1
[图像处理]-Opencv中数据类型CV_8U, CV_16U, CV_16S, CV_32F 以及 CV_64F是什么?
sobelx = cv2.Sobel(img, cv2.CV_64F, 1, 0, ksize=3) # 用cv2.CV_64F保留负数
sobelx = cv2.convertScaleAbs(sobelx) # 取绝对值
cv_show('sobelx', sobelx)
sobely = cv2.Sobel(img, cv2.CV_64F, 0, 1, ksize=3)
sobely = cv2.convertScaleAbs(sobely)
cv_show('sobely', sobely)
分别计算出了x和y,再进行图像融合,得到最终的边缘图
sobelxy = cv2.addWeighted(sobelx, 0.5, sobely, 0.5, 0)
直接用Sobel同时进行水平和竖直边缘提取,不建议!!!
sobelxxyy = cv2.Sobel(img, cv2.CV_64F, 1, 1, ksize=3)
对比展示
res = np.hstack((img, sobelx, sobely, sobelxy, sobelxxyy))
cv_show('res', res)
把代码整合在一起,提取一张复杂图像的边缘
# 以灰度图读取图像
img = cv2.imread('pic/Lenna.png', cv2.IMREAD_GRAYSCALE)
img = cv2.resize(img, (0,0), fx=0.8, fy=0.8)# 提取sobelx
sobelx = cv2.Sobel(img, cv2.CV_64F, 1, 0, ksize=3)
sobelx = cv2.convertScaleAbs(sobelx)# 提取sobely
sobely = cv2.Sobel(img, cv2.CV_64F, 0, 1, ksize=3)
sobely = cv2.convertScaleAbs(sobely)# 融合sobelxy
sobelxy = cv2.addWeighted(sobelx, 0.5, sobely, 0.5, 0)# 显示查看
res = np.hstack((img, sobelxy))
cv_show('res', res)
Scharr算子
Gx=[−303−10010−303]∗Aand Gy=[−3−10−3000−3−10−3]∗A\mathbf{G}_{x}=\left[\begin{array}{ccc} -3 & 0 & 3 \\ -10 & 0 & 10 \\ -3 & 0 & 3 \end{array}\right] * \mathbf{A} \quad \text { and } \quad \mathbf{G}_{y}=\left[\begin{array}{ccc} -3 & -10 & -3 \\ 0 & 0 & 0 \\ -3 & -10 & -3 \end{array}\right] * \mathbf{A} Gx=⎣⎡−3−10−30003103⎦⎤∗A and Gy=⎣⎡−30−3−100−10−30−3⎦⎤∗A
- 关注得更多,线条更丰富一些
- scharr算子比Sobel算子更敏感一些
- 比起Sobel算子,没有ksize这个参数了
# 提取灰度图
img = cv2.imread('pic/Lenna.png', cv2.IMREAD_GRAYSCALE)
img = cv2.resize(img, (0,0), fx=0.8, fy=0.8)# scharrx
x = cv2.Scharr(img, cv2.CV_64F, 1, 0)
x = cv2.convertScaleAbs(x)# scharry
y = cv2.Scharr(img, cv2.CV_64F, 0, 1)
y = cv2.convertScaleAbs(y)# scharrxy
scharrxy = cv2.addWeighted(x, 0.5, y, 0.5, 0)# show()
cv_show('scharrxy', scharrxy)
laplacian算子(拉普拉斯算子)
G=[0101−41010]\mathbf{G}=\left[\begin{array}{ccc} 0 & 1 & 0 \\ 1 & -4 & 1 \\ 0 & 1 & 0 \end{array}\right] G=⎣⎡0101−41010⎦⎤
- 像是:中间 - 边缘
- 比起Sobel算子、Scharr算子,没有x、y那种水平、竖直的感觉了
- 是二阶导,对边界更敏感
- 存在的问题:对一些噪音点更敏感
- 一般是与其他算法共同使用,不会单独去使用它
img = cv2.imread('pic/Lenna.png', cv2.IMREAD_GRAYSCALE)
img = cv2.resize(img, (0,0), fx=0.8, fy=0.8)
laplacian = cv2.Laplacian(img, cv2.CV_64F)
laplacian = cv2.convertScaleAbs(laplacian)cv_show('laplacian', laplacian)
比较3种算法得边缘提取效果
res = np.hstack((sobelxy, scharrxy, laplacian))
cv_show('res', res)
Canny边缘检测
cv2.Canny(img, minval, maxval)
minval或maxval值越小,检测出来的边就越多;反之越少。
- 1)使用高斯滤波器,以平滑图像,滤除噪声。
- 2)使用Sobel算子,计算图像中每个像素点得梯度大小和方向。
- 3)应用非极大值(Non-Maximum Suppression)抑制,以消除边缘检测带来的杂散效应。
- 4)应用双阈值(Double-Threshold)检测来确定真实的和潜在的边缘。
- 5)通过抑制孤立的弱边缘最终完成边缘检测。
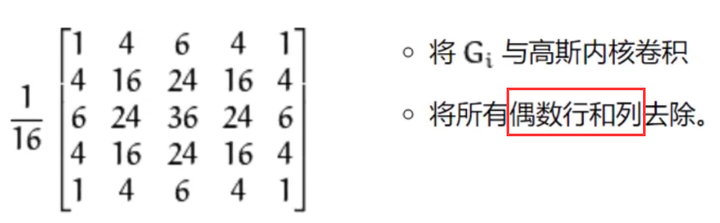
1.高斯滤波器
H=[0.09240.11920.09240.11920.15380.11920.09240.11920.0924]<–这里还进行是归一化处理 e=H∗A=[h11h12h13h21h22h23h31h32h33]∗[abcdefghi]=sum([a×h11b×h12c×h13d×h21e×h22f×h23g×h31h×h32i×h33])\begin{aligned} &H=\left[\begin{array}{lll} 0.0924 & 0.1192 & 0.0924 \\ 0.1192 & 0.1538 & 0.1192 \\ 0.0924 & 0.1192 & 0.0924 \end{array}\right] \text { <--这里还进行是归一化处理 } \\ &e=H * A=\left[\begin{array}{lll} \mathrm{h}_{11} & \mathrm{~h}_{12} & \mathrm{~h}_{13} \\ \mathrm{~h}_{21} & \mathrm{~h}_{22} & \mathrm{~h}_{23} \\ \mathrm{~h}_{31} & \mathrm{~h}_{32} & \mathrm{~h}_{33} \end{array}\right] *\left[\begin{array}{lll} a & b & c \\ d & e & f \\ g & h & i \end{array}\right]=\operatorname{sum}\left(\left[\begin{array}{lll} \mathrm{a} \times \mathrm{h}_{11} & \mathrm{~b} \times \mathrm{h}_{12} & \mathrm{c} \times \mathrm{h}_{13} \\ \mathrm{~d} \times \mathrm{h}_{21} & \mathrm{e} \times \mathrm{h}_{22} & \mathrm{f} \times \mathrm{h}_{23} \\ \mathrm{~g} \times \mathrm{h}_{31} & \mathrm{~h} \times \mathrm{h}_{32} & \mathrm{i} \times \mathrm{h}_{33} \end{array}\right]\right) \end{aligned} H=⎣⎡0.09240.11920.09240.11920.15380.11920.09240.11920.0924⎦⎤ <–这里还进行是归一化处理 e=H∗A=⎣⎡h11 h21 h31 h12 h22 h32 h13 h23 h33⎦⎤∗⎣⎡adgbehcfi⎦⎤=sum⎝⎛⎣⎡a×h11 d×h21 g×h31 b×h12e×h22 h×h32c×h13f×h23i×h33⎦⎤⎠⎞
2.梯度和方向
G=Gx2+Gy2θ=arctan(Gy/Gx)Sx=[−101−202−101]Sy=[121000−1−2−1]Gx=Sx∗A=[−101−202−101]∗[abcdefghi]=sum([−a0c−2d02f−g0i])Gy=Sy∗A=[121000−1−2−1]∗[abcdefghi]=sum([a2bc000−g−2h−i])\begin{aligned} &\begin{aligned} &G=\sqrt{G_{x}^{2}+G_{y}^{2}} \\ &\theta=\arctan \left(G_{y} / G_{x}\right) \quad S_{x}=\left[\begin{array}{ccc} -1 & 0 & 1 \\ -2 & 0 & 2 \\ -1 & 0 & 1 \end{array}\right] \quad S_{y}=\left[\begin{array}{ccc} 1 & 2 & 1 \\ 0 & 0 & 0 \\ -1 & -2 & -1 \end{array}\right] \end{aligned}\\ &G_{x}=S_{x} * A=\left[\begin{array}{ccc} -1 & 0 & 1 \\ -2 & 0 & 2 \\ -1 & 0 & 1 \end{array}\right] *\left[\begin{array}{ccc} a & b & c \\ d & e & f \\ g & h & i \end{array}\right]=\operatorname{sum}\left(\left[\begin{array}{ccc} -a & 0 & c \\ -2 d & 0 & 2 f \\ -g & 0 & i \end{array}\right]\right)\\ &G_{y}=S_{y} * A=\left[\begin{array}{ccc} 1 & 2 & 1 \\ 0 & 0 & 0 \\ -1 & -2 & -1 \end{array}\right] *\left[\begin{array}{ccc} a & b & c \\ d & e & f \\ g & h & i \end{array}\right]=\operatorname{sum}\left(\left[\begin{array}{ccc} a & 2 b & c \\ 0 & 0 & 0 \\ -g & -2 h & -i \end{array}\right]\right) \end{aligned} G=Gx2+Gy2θ=arctan(Gy/Gx)Sx=⎣⎡−1−2−1000121⎦⎤Sy=⎣⎡10−120−210−1⎦⎤Gx=Sx∗A=⎣⎡−1−2−1000121⎦⎤∗⎣⎡adgbehcfi⎦⎤=sum⎝⎛⎣⎡−a−2d−g000c2fi⎦⎤⎠⎞Gy=Sy∗A=⎣⎡10−120−210−1⎦⎤∗⎣⎡adgbehcfi⎦⎤=sum⎝⎛⎣⎡a0−g2b0−2hc0−i⎦⎤⎠⎞
3.非极大值抑制
- 梯度方向与边界方向应该是一个垂直关系。
- 当前这个值是不是极大值点,应该跟邻近值去比较幅值大小,如果是最大的则保留,不是最大的就抑制掉。
![]()
![]()
4.双阈值检测
![]()
- minval或者maxval越小,则表示条件比较松,检测出来的边比较丰富(杂乱)
- minval或者maxval越大,检测到的边缘就较少
img = cv2.imread('pic/Lenna.png', cv2.IMREAD_GRAYSCALE)
img = cv2.resize(img, (0,0), fx=0.8, fy=0.8)v1 = cv2.Canny(img, 80, 150) # 都比较大,检测出来的线条就越少
v2 = cv2.Canny(img, 50, 100) # minnval和maxval都比较小,检测出的线条就越多res = np.hstack((img, v1, v2))
cv_show('res', res)
图像金字塔
目的:进行特征提取
- 高斯金字塔 cv2.pyrUp(img)上采样、cv2.pyrDown(img)下采样,每调用一次就放大或者缩小2倍
- 拉普拉斯金字塔
一般金字塔4~5层
强烈推荐一下这篇博文,后续要了解的时候再去仔细看看吧!OpenCV中的图像金字塔(高斯金字塔、拉普拉斯金字塔)
注意:通过上面的高斯金字塔上采样和下采样的原理可以知道,当我们先下采样然后再上采样;或者反过来操作,这个时候得到的图像和虽然原图尺寸是一样的,但是图像会有一些模糊(或者说是失真)
![]()
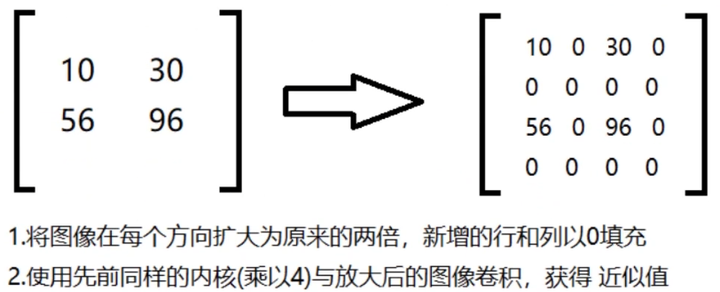
下采样downsample,把图片缩小(在上图的方向就应该是由底向上)
高斯金字塔
高斯金字塔:向下采样方法(downsample缩小)
高斯金字塔:向上采样方法(upsample缩小)
img = cv2.imread('pic/dog3_small.jpg')up = cv2.pyrUp(img) # 先上采样放大2倍
down = cv2.pyrDown(up) # 再下采样缩小2倍,shape变为与原图相同# 与原图对比,会发现变模糊
res = np.hstack((img, down))
cv_show('res', res)
拉普拉斯金字塔
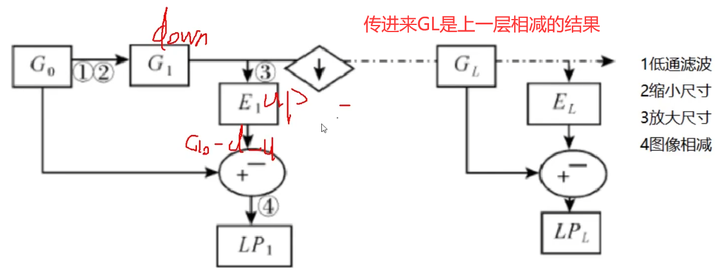
每一层都是去做:计算出原图 - 先下采样再上采样 的差异,即
Li=Gi−PyrUp(PyrDown(Gi))L_i=G_i-PyrUp(PyrDown(G_i))Li=Gi−PyrUp(PyrDown(Gi))
# 进行一层拉普拉斯金字塔效果
img = cv2.imread('pic/dog3_small.jpg')down = cv2.pyrDown(img)
down_up = cv2.pyrUp(down)
L_1 = img - down_up # 1层down2 = cv2.pyrDown(L_1)
down_up2 = cv2.pyrUp(down2)
L_2 = L_1 - down_up2 # 2层down3 = cv2.pyrDown(L_2) # 3层
down_up3 = cv2.pyrUp(down3)
L_3 = L_2 - down_up3# down4 = cv2.pyrDown(L_3) # 4层
# down_up4 = cv2.pyrUp(down4)
# L_4 = L_3 - down_up4res = np.hstack((img, L_1, L_2, L_3))
cv_show('res', res)
图像轮廓
先进行轮廓检测:contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE) # thresh是img进行灰度化再二值化
再选择某一个具体轮廓:cnt = contours[0]
按照需求绘制原图+边界图,注意:一定要先将原图copy再复制,否则原图会发生更改,即draw_img=img.copy()
绘制轮廓图:res = cv2.drawContours(draw_img, contours, -1, (0, 0, 255), 1)
绘制轮廓近似图:epsilon = 0.05 * cv2.arcLength(cnt, True) 、approx = cv2.approxPolyDP(cnt, epsilon, True)
绘制轮廓矩形外接图:x,y,w,h = cv2.boundingRect(cnt)、res = cv2.rectangle(draw_img, (x,y), (x+w,y+h), (0,255,0), 2)
绘制轮廓圆形外接图:(x,y), radius = cv2.minEnclosingCircle(cnt)、res = cv2.circle(draw_img, center, radius, (0,255,0), 2)
轮廓检测
代码:cv2.findContours(img, mode, method)
注意:使用灰度化且二值化图像。
mode:轮廓检索模式
- RETR_EXTERNAL:只检索最外面的轮廓;
- RETR_LIST:检索所有的轮廓,并将其保存到一条链表当中;
- RTR_CCOMP:检索所有的轮廓,并将他们组织为两层:顶层是各部分的外部边界,第二层是空洞的世界;
- RETR_TREE:检索所有的轮廓,并重构嵌套轮廓的整个层次。(最常用)
method:轮廓逼近方法
- CHAIN_APPROX_NONE:以Freeman链码的方式输出轮廓,所有其他方法输出多边形(顶点的序列)。
- CHAIN_APPROX_SIMPLE:压缩水平的、垂直的和斜的部分,也就是,函数只保留他们的终点部分。
参考一下这个博客:opencv:图像轮廓检测 cv2.findContours() 与 cv2.drawContours()
我使用的是opencv2,所以返回的参数只有2个:轮廓点集contours(是一个list,可是为啥我看着是一个tuple,所有元素都是ndarray)、每条轮廓对应的索引hierarchy。
opencv3还会多返回一个img(所处理的图像),作为第一个返回参数,即返回img, contours, hierarchy。
step1:转为灰度化且二值化图像
img = cv2.imread('pic/edge.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # 灰度化
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY) # 二值化
cv_show('thresh', thresh)
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE) # 得到轮廓点集
step2:绘制轮廓
注意:一定要先对绘制图像进行copy(),不然原图会发生改变!
# 传入绘制图像(原图)、轮廓,轮廓索引,颜色模式,线条厚度(只能为整数)
draw_img = img.copy()
res = cv2.drawContours(draw_img, contours, -1, (0, 0, 255), 1) # -1表示选择轮廓索引进行绘制,(0,0,255)在BGR模式下表示红色,1表示线条厚度
cv_show('res',res)
轮廓特征
应用:特征分析、轮廓建模
上面轮廓检测得到的contours不能直接拿来做算面积等操作。当要计算轮廓特征时,需要将具体的轮廓(指定索引)拿出来。
cnt = contours[0]
# 面积
area = cv2.contourArea(cnt)
# 周长,True表示闭合的
length = cv2.arcLength(cnt, True)
print(area, length)
轮廓近似

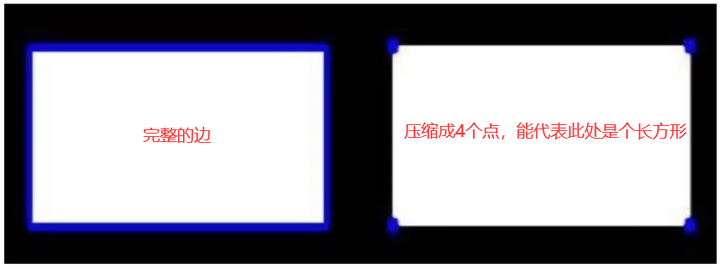
就是让轮廓比较规整,不那么毛毛刺刺的。对曲线近似成直线。epsilon的值越大,则近似程度越小,毛边轮廓越多(接近于原图的边缘轮廓)。
approx = cv2.approxPolyDP(contour,epsilon,True) 采用Douglas-Peucker算法
- contour:轮廓的点集
- epsilon:epsilon的含义如下所述,滤掉的线段集离新产生的线段集的距离为d,若d小于epsilon,则滤掉,否则保留
- True:指示新产生的轮廓闭合
参考博客:opencv 使用approxPolyDP轮廓近似
还有采用的算法:Douglas-Peucker压缩算法
img = cv2.imread('pic/edgestar.png') # 灰度图
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
cv_show('img',gray)
_, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY) # 二值化
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE) # 提取轮廓cnt = contours[0]
# 显示轮廓和原图
draw_img = img.copy()
res = cv2.drawContours(draw_img, contours[0], -1, (0,0,255), 2)
cv_show('res',res)
epsilon = 0.05*cv2.arcLength(cnt, True) # 一般是按照周长的百分比设置的
approx = cv2.approxPolyDP(cnt, epsilon, True) # 近似函数:指定的某一个轮廓,给字节指定的比较的长度,得到的结果也是一个轮廓draw_img = img.copy()
res = cv2.drawContours(draw_img, [approx], -1, (0,0,255), 2)
cv_show('res', res)
外接矩形(边界矩阵)
矩形边框(Bounding Rectangle)是说,用一个最小的矩形,把找到的形状(也就是指定的cnt)包起来。
- cv2.boundingRect(cnt) 返回4个值分别是x,y,w,h。x,y是矩阵左上点的坐标,w,h是矩阵的宽和高。
- 利用cv2.rectangle(img, (x,y), (x+w,y+h), (0,255,0), 2)画出矩形
- img:原图
- (x,y) :矩形的左上点坐标
- (x+w,y+h):矩形的右下点坐标
- (0,255,0):画线对应的rgb颜色,这里表示绿色
- 2是线条宽度
参考博客:opencv-python中 boundingRect(cnt)以及cv2.rectangle用法
img = cv2.imread('pic/edgestar.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # 转为灰度图
_, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY) #转为二值图
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE) # 找轮廓cnt = contours[0]x,y,w,h = cv2.boundingRect(cnt) # 显示外面的绿框draw_img = img.copy()
res = cv2.rectangle(draw_img, (x,y), (x+w,y+h), (0,255,0), 2)
cv_show('img', res)
轮廓面积与边界矩形比
area = cv2.contourArea(cnt) # 轮廓面积
x, y, w, h = cv2.boundingRect(cnt) # 边界矩形
rect_area = w * h # 边界矩形面积
extent = float(area) / rect_area
print('轮廓面积与边界矩形比',extent)
外接圆
(x,y), radius = cv2.minEnclosingCircle(cnt)
center = (int(x), int(y)) # 圆心
radius = int(radius) # 半径draw_img = img.copy()
res = cv2.circle(draw_img, center, radius, (0,255,0), 2)
cv_show('img', res)
模板匹配
模板匹配和卷积原理很像,模板在原图上从原点开始滑动,计算模板与(图象被模板覆盖的地方)的差别程度,这个差别程度的计算方法在opencv中有6种,然后将每次结算的结果放进一个矩阵里,作为结果输出。加入原图形是A×B大小,而模板是a×b大小,则输出的结果矩阵是(A-a+1)×(B-b+1)。
从左到右,从上到下,跟模板匹配。一个区域一个区域地去进行比较,返回每个窗口匹配的结果。(用平方项去代表像素点之间的损失,或者平方系数)
参考博客:cv2.matchTemplate模板匹配和cv2.minMaxLoc()函数
参考博客:opencv学习笔记十八:模板匹配(cv2.matchTemplate、cv2.minMaxLoc)
- cv2.matchTemplate(image, templ, method, result=None, mask=None),返回的是一个矩阵res,记录所有滑窗的左上角坐标。
- image:待搜索图像
- templ:模板图像
- result:匹配结果
- method:计算匹配程度的方法(使用不同方法产生的结果意义可能不太一样,有些返回值越大匹配程度越好,而有些方法返回值越小匹配程度越好。)
- TM_SQDIFF:平方差匹配法:该方法采用平方差来进行匹配;最好的匹配值为0;匹配越差,匹配值越大。小
- TM_CCORR:相关匹配法:该方法采用乘法操作;数值越大表明匹配程度越好。
- TM_CCOEFF:相关系数匹配法:1表示完美的匹配;-1表示最差的匹配。
- TM_SQDIFF_NORMED:归一化平方差匹配法:计算出来的值越接近于0,越相关。小
- TM_CCORR_NORMED:归一化相关匹配法:计算出来的值越接近于1,越相关
- TM_CCOEFF_NORMED:归一化相关系数匹配:计算出来的值越接近1,越相关
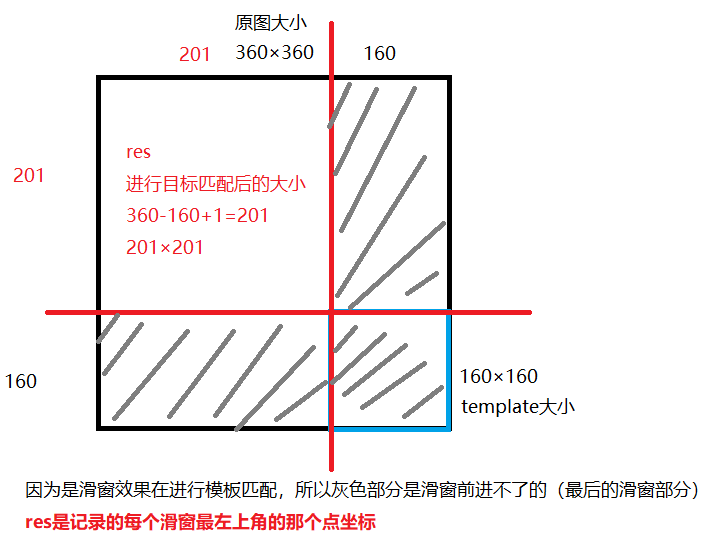 这个res的大小最后还加的那个1,就是每行上滑窗能到的最后一个位置的左上角
这个res的大小最后还加的那个1,就是每行上滑窗能到的最后一个位置的左上角
- cv2.minMaxLoc(src, mask=None)
函数功能:返回一个矩阵的最小值,最大值,最小值索引,最大值索引。(min_val,max_val,min_indx,max_indx)
注意:
- 图像img和模板template都需要以灰度图读进来。
- 建议用上面使用最后3个归一化的方法,因为结果会更公平一些。
- 假设min_loc或max_loc的值为(0,2),则表示的是在第1列第3行,也就是说第一个值是宽度,第二个值才是高度。
# 模板匹配
img = cv2.imread('pic/Lenna_small.png', 0) # 读入灰度图像
template = cv2.imread('pic/face.png', 0) # 读入灰度图像
h, w = template.shape[:2]
img.shape
(360, 360)
template.shape
(160, 160)
methods = ['cv2.TM_CCOEFF','cv2.TM_CCOEFF_NORMED','cv2.TM_CCORR','cv2.TM_CCORR_NORMED','cv2.TM_SQDIFF','cv2.TM_SQDIFF_NORMED']
res = cv2.matchTemplate(img, template, 1)
res.shape # 360-160+1,表示每一个窗口左上角的值,或者平方项的损失
(201, 201)
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(res) # 去定位一下
min_val
0.0
max_val
0.3593710660934448
min_loc
(112, 116)
max_loc
(0, 188)
单个目标匹配
参考博客:python中的eval函数的使用详解
感觉只要记住它的作用就行了,就是把这些已经内定好的方法,例如’cv2.TM_CCOEFF’,'cv2.TM_CCOEFF_NORMED’等,利用eval函数,就可以找到在系统中它的序号标志代表是多少了。
import matplotlib.pyplot as pltfor meth in methods:img2 = img.copy() # 原图副本,否则在绘矩形时会发生改变# 匹配方法的真值method = eval(meth)print(method)res = cv2.matchTemplate(img, template, method) # 匹配结果(是一个数组)min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(res) # 定位# 如果是平方差匹配TM_SQDIFF或归一化平方差匹配TM_SQDIFF_NONRMED,取最小值if method in [cv2.TM_SQDIFF, cv2.TM_SQDIFF_NORMED]:top_left = min_locelse:top_left = max_locbottom_right = (top_left[0]+w, top_left[1]+h) # 右下角坐标# 画矩形cv2.rectangle(img2, top_left, bottom_right, 255, 2) # 255表示绘制颜色,白色,等价于(255, 255, 255)plt.subplot(121), plt.imshow(res, cmap='gray')plt.xticks([]), plt.yticks([]) # 隐藏坐标轴plt.subplot(122), plt.imshow(img2, cmap='gray')plt.xticks([]), plt.yticks([])plt.suptitle(meth)plt.show()
4
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-FCKHj7Nx-1647232784478)(output_137_1.png)]
5
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-eQw7Rfyu-1647232784478)(output_137_3.png)]
2
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-VHCzfNlT-1647232784478)(output_137_5.png)]
3
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-5boI8zaK-1647232784479)(output_137_7.png)]
0
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-x3kfnDGQ-1647232784479)(output_137_9.png)]
1
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-iiXEjAxj-1647232784479)(output_137_11.png)]
多个对象匹配
【唐宇迪】opencv实战学习相关推荐
- 唐宇迪博士实战代码教学视频课程全集,带你一起数据分析、深度学习
唐宇迪,同济大学计算机博士,专注于机器学习与计算机视觉领域,人工智能与数据科学领域培训专家,上海人工智能协会核心主干.参与多个国家级计算机视觉与数据挖掘项目,主要研究面部识别与特征构造,异常识别等领域 ...
- 唐宇迪机器学习实战课程笔记(全)
1. 线性回归 1.1线性回归理论 1.2线性回归实战 2.训练调参基本功(线性回归.岭回归.Lasso回归) 2.1 线性回归模型实现 2.2不同GD策略对比 2.3多项式曲线回归 2.4过拟合和欠 ...
- 唐宇迪之tensorflow学习笔记项目实战(LSTM情感分析)
我们首先来看看RNN的网络结构,如下图所示 xt 表示第t,t=1,2,3-步(step)的输入 st 为隐藏层的第t步的状态,它是网络的记忆单元. st=f(u×xt+w×st−1) ,其中f一般是 ...
- 唐宇迪机器学习实战——梯度下降求解逻辑回归(理论基础+源代码实现)
问题的提出 符号问题,这里的lg就是指log2,你的理解是正确的!在计算机科学中有些符号的使用跟我们在数学中使用的有区别.比如有时候log用来表示自然对数(以e为底数).希望对你有帮助! 首先计算机科 ...
- YOLO-V4 论文学习+唐宇迪博士课程学习笔记
论文主要贡献: 1.利用单GPU即可训练一个目标检测器. 2.验证了Bag-of-Freebies 和 Bag-of-Specials方法在训练目标检测器当中的作用. 3.对包括CBN.PAN.SAM ...
- 23神经网络 :唐宇迪《python数据分析与机器学习实战》学习笔记
唐宇迪<python数据分析与机器学习实战>学习笔记 23神经网络 1.初识神经网络 百度深度学习研究院的图,当数据规模较小时差异较小,但当数据规模较大时深度学习算法的效率明显增加,目前大 ...
- 自然语言处理Word2Vec视频学习教程-唐宇迪-专题视频课程
自然语言处理Word2Vec视频学习教程-7870人已学习 课程介绍 自然语言处理Word2Vec视频培训课程:自然语言处理中重要的算法,word2vec原理,词向量模型.教程从语言模 ...
- 唐宇迪资源-机器学习与深度学习
本人看了很多教学视频,觉得唐宇迪老师的机器学习课程,能够使用通俗易懂的原理讲解与实例代码结合带大家快速熟练掌握机器学习的经典算法.对于有基础和没基础的同学,都能让你轻易入门,但是得一边看一遍敲,实践才 ...
- 银行卡识别-唐宇迪老师的项目实战
看了B站上唐宇迪老师的opencv视频教程,跟着打了一遍代码 # 导入工具包 from imutils import contours import numpy as np import argpar ...
- 免费技术直播:唐宇迪带你一节课了解机器学习经典算法
常常有小伙伴在后台反馈:机器学习经典算法有哪些? 自学难度大又没有效果,该怎么办? CSDN为了解决这个难题,联合唐宇迪老师为大家带来了一场精彩的直播[一节课掌握机器学习经典算法-线性回归模型].本次 ...
最新文章
- 数字建模matlab,Matlab基础及数学建模.ppt
- 网络爬虫-python-爬取天涯求职贴
- mysql max_allowed_packet 参数 限制接受的数据包大小
- php文件手机怎么解压,linux 怎么解压文件
- android 传感器ceshi,Android代码-传感器-测试手机支持那几种传感
- Knative Eventing 之 Sequence 介绍
- 对DataTable的一些解释
- 俯首甘为孺子牛上一句是什么
- java停机保存数据_哦,这就是java的优雅停机?(实现及原理)
- NOIp 2014 联合权值 By cellur925
- 将JQuery框架集成到SharePoint 2010中
- 气象统计 第八次实习 EOF分析
- 图像区块分割与采样YUV4:2:0
- 2017年第十七届迪培思广州国际广告展会刊(参展商名录)
- Debian旧版本下载
- 让我帮你百度一下吧--精简版Github源码
- ubuntu 16.04 通过wine安装Kindle for pc 中文无乱码
- 【宝塔邮局管理器】使用教程、Email配置
- AE内置效果Anglecontrol
- influx数据同步