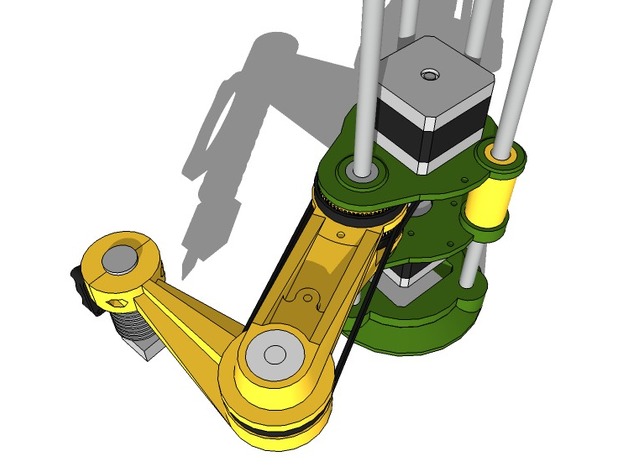
基于marlin固件的SCARA机器人
>>所有文件在thingiverse上
参考:
平行并联臂结构morgan(上图),串联臂http://www.thingiverse.com/thing:1241491(下图),Delta3D打印机代码解读,Marlin精读,DARM

定义相对坐标:
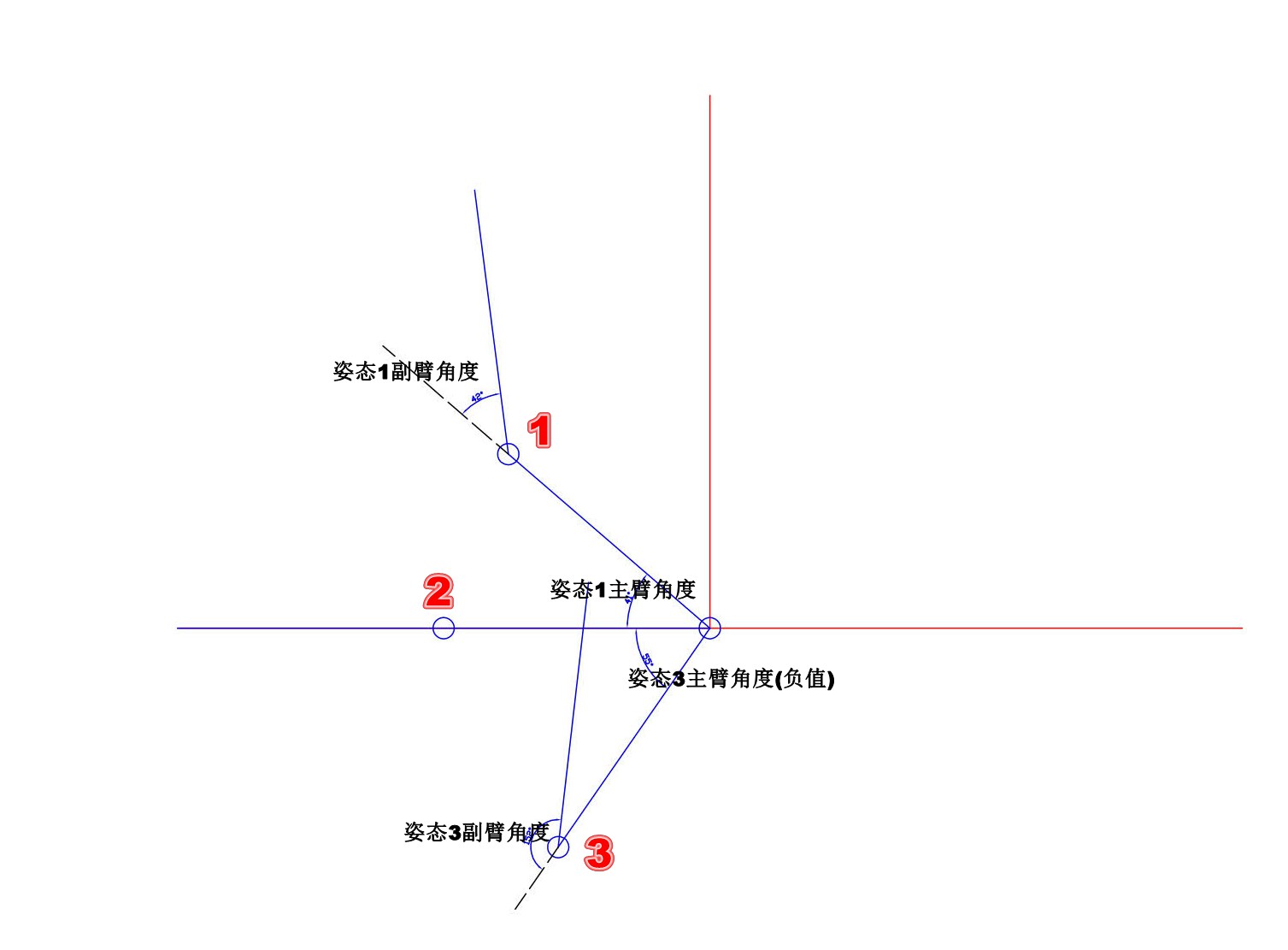
定义x轴(主臂)的相对坐标为主臂与x负半轴轴夹角的角度(在上为正,在下为负),y轴(副臂)的相对坐标为副臂和主臂延长线夹角的角度。(图中:姿态1的相对坐标[X41,Y42],姿态2的相对坐标为[X0,Y0],姿态3的相对坐标为[X-55,Y152])。X轴最小坐标值时触发限位,Y轴最大坐标值时触发限位。
正解方程(相对坐标转化成绝对坐标):
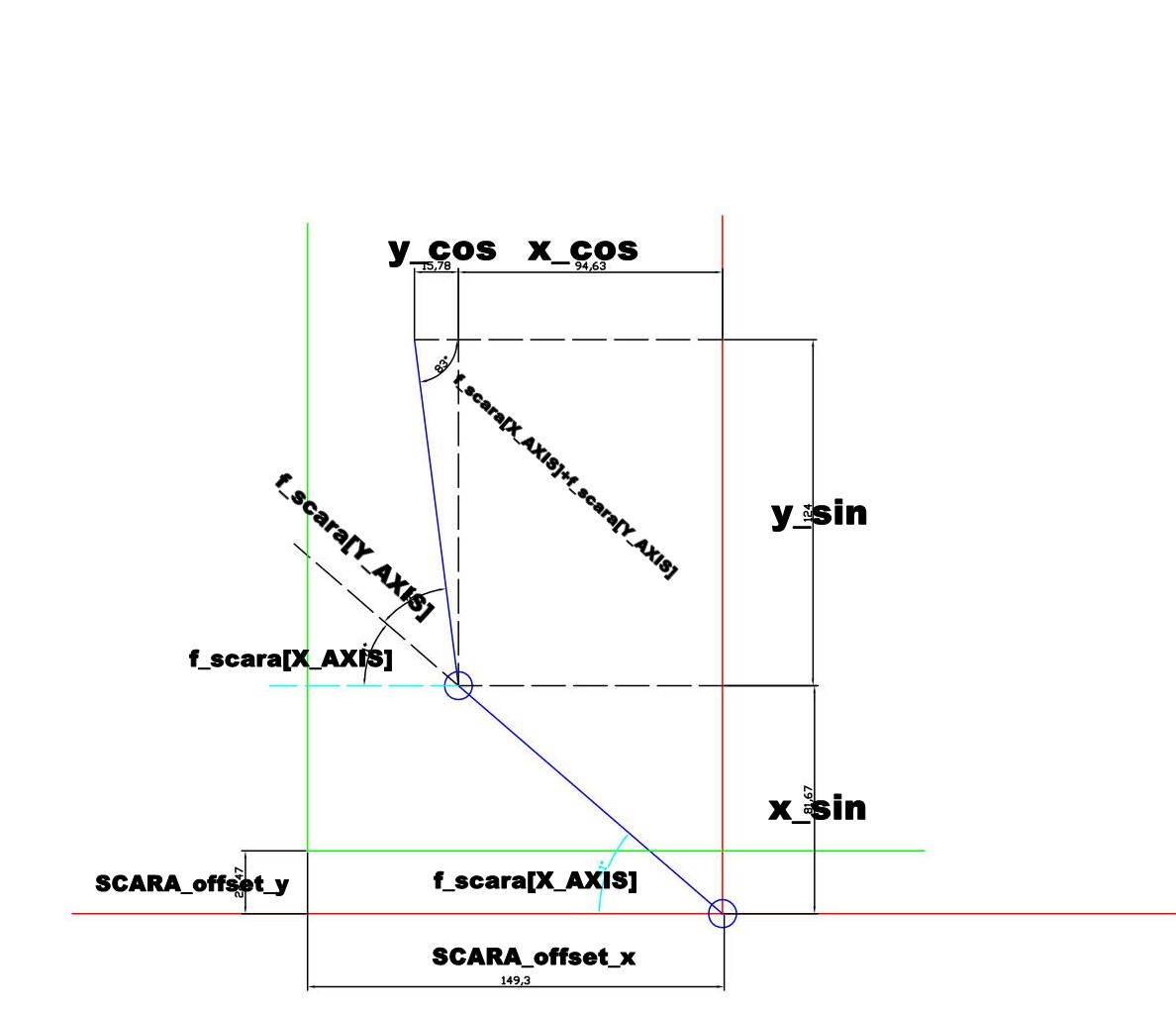
void calculate_SCARA_forward_Transform(float f_scara[3]){//先假定中心转轴为绝对坐标原点(图中红色坐标)//图中绿色坐标为真正的坐标float x_sin, x_cos, y_sin, y_cos;//如图//f_scara[X_AXIS]为X轴相对坐标,SCARA_RAD2DEG为弧度转角度转化因子等于pi/180(相对坐标是角度制,三角函数是弧度制,需要转化)//Linkage_1、Linkage_2分别为主、副臂长度//delta[X_AXIS]为绝对坐标的X轴值//SCARA_offset[X_AXIS] 、SCARA_offset[Y_AXIS] 是假定的坐标原点相对于真实坐标的坐标(真实坐标原点的偏移量)//简单的三角函数关系就能得出x_sin = sin(f_scara[X_AXIS]/SCARA_RAD2DEG) * Linkage_1; x_cos = cos(f_scara[X_AXIS]/SCARA_RAD2DEG) * Linkage_1;y_sin = sin(f_scara[X_AXIS]/SCARA_RAD2DEG + f_scara[Y_AXIS]/SCARA_RAD2DEG) * Linkage_2;y_cos = cos(f_scara[X_AXIS]/SCARA_RAD2DEG + f_scara[Y_AXIS]/SCARA_RAD2DEG) * Linkage_2;delta[X_AXIS] = -x_cos - y_cos + SCARA_offset[X_AXIS] ;//因为相对坐标从x轴负半轴开始,实际为负值,所以取反。加上偏移量变换成真正的坐标。delta[Y_AXIS] = x_sin + y_sin + SCARA_offset[Y_AXIS] ; } 反解方程(绝对坐标转化为相对坐标):
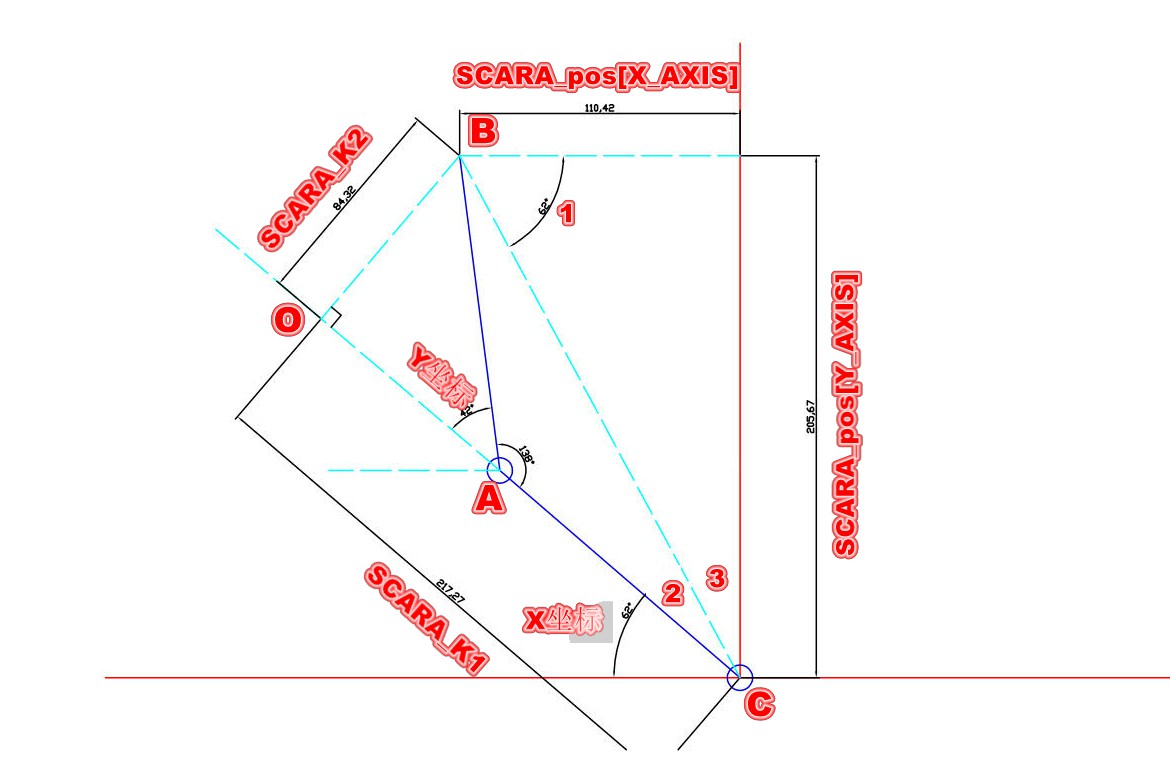
void calculate_delta(float cartesian[3]){float SCARA_pos[2];static float SCARA_C2, SCARA_S2, SCARA_K1, SCARA_K2, SCARA_theta, SCARA_psi; SCARA_pos[X_AXIS] = -cartesian[X_AXIS] * axis_scaling[X_AXIS] + SCARA_offset[X_AXIS] ;//把实际坐标(偏移后的坐标)转化成假定的坐标,X轴取反。 SCARA_pos[Y_AXIS] = cartesian[Y_AXIS] * axis_scaling[Y_AXIS] - SCARA_offset[Y_AXIS] ; #if (Linkage_1 == Linkage_2)SCARA_C2 = ( ( sq(SCARA_pos[X_AXIS]) + sq(SCARA_pos[Y_AXIS]) ) / (2 * (float)L1_2) ) - 1;#elseSCARA_C2 = ( sq(SCARA_pos[X_AXIS]) + sq(SCARA_pos[Y_AXIS]) - (float)L1_2 - (float)L2_2 ) / 45000; #endif//三角形ABC中,用余弦定理计算角A的值,角A和Y轴电机的角度(相对坐标)互补(余弦值取反)可以得到Y轴角度的余弦值SCARA_S2 = sqrt( 1 - sq(SCARA_C2) );//计算Y轴角度的正弦值SCARA_K1 = Linkage_1 + Linkage_2 * SCARA_C2;//直角三角形OBC中,计算OC的长SCARA_K2 = Linkage_2 * SCARA_S2;//计算OB的长SCARA_theta = ( atan2(SCARA_pos[X_AXIS],SCARA_pos[Y_AXIS])-atan2(SCARA_K1, SCARA_K2) )*-1 //计算X轴的相对坐标(弧度制),图中角1-角2,即(90-角3)-(90-角OBC),即(角3-角OBC)*-1SCARA_psi = atan2(SCARA_S2,SCARA_C2);//计算Y轴的相对坐标delta[X_AXIS] = SCARA_theta * SCARA_RAD2DEG; //弧度转角度 delta[Y_AXIS] = SCARA_psi * SCARA_RAD2DEG; delta[Z_AXIS] = cartesian[Z_AXIS];第四轴算法:
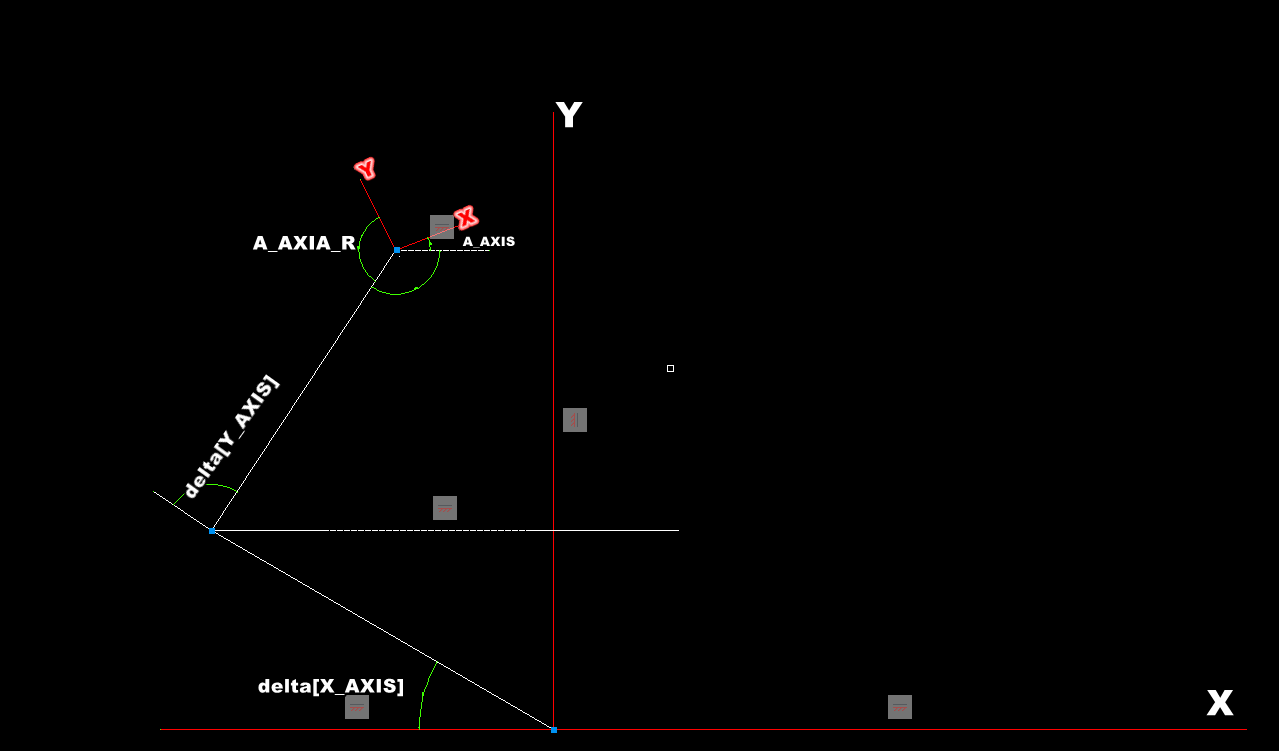
第四轴为旋转轴,规定两手指的连线(图中定义为手爪的X轴)与绝对坐标系X轴的夹角(0-180)为第四轴的绝对坐标,图中A_AXIS,相对坐标(即舵机的角度)为手爪Y轴(垂直于手爪X轴)与主臂的夹角,图中A_AXIS_R ,简单 几何关系得:
A_AXIS_R=270-delta[X_AXIS]-delta[Y_AXIS]-A_AXIS
在反解函数中加入:
servos[0].write(0.9*(270-delta[X_AXIS]-delta[Y_AXIS]-A_AXIS));注:变量A_AXIS的值由G5代码获取,0.9是比例系数,因为用的舵机角度不准确,0-180实际却是0-200。
Marlin基础参数修改:
Configuration.h文件中
//========================= SCARA配置 ==================================#define SCARA #define scara_segments_per_second 400 #define Linkage_1 125 // 主臂长度#define Linkage_2 125 // 副臂长度#define SCARA_offset_x 60 // 绝对坐标相对假定坐标的偏移量#define SCARA_offset_y -100#define SCARA_offset_z 0#define SCARA_RAD2DEG 57.2957795 //弧度转角度因子 #define L1_2 sq(Linkage_1) //主臂的平方值#define L2_2 sq(Linkage_2) //========================= 基础设置 ==================================#define SERIAL_PORT 0//端口,默认0#define BAUDRATE 115200//波特率#ifndef MOTHERBOARD#define MOTHERBOARD BOARD_RAMPS_13_EFB//主板类型,在board.h中可以找到对应主板的名称#endif#define EXTRUDERS 1//挤出机数量#define POWER_SUPPLY 1//电源类型,一般为1//============================= 温度设置 ============================// -2 is thermocouple with MAX6675 (only for sensor 0)// -1 is thermocouple with AD595// 0 is not used// 1 is 100k thermistor - best choice for EPCOS 100k (4.7k pullup)// 2 is 200k thermistor - ATC Semitec 204GT-2 (4.7k pullup)// 3 is Mendel-parts thermistor (4.7k pullup)// 4 is 10k thermistor !! do not use it for a hotend. It gives bad resolution at high temp. !!// 5 is 100K thermistor - ATC Semitec 104GT-2 (Used in ParCan & J-Head) (4.7k pullup)// 6 is 100k EPCOS - Not as accurate as table 1 (created using a fluke thermocouple) (4.7k pullup)// 7 is 100k Honeywell thermistor 135-104LAG-J01 (4.7k pullup)// 71 is 100k Honeywell thermistor 135-104LAF-J01 (4.7k pullup)// 8 is 100k 0603 SMD Vishay NTCS0603E3104FXT (4.7k pullup)// 9 is 100k GE Sensing AL03006-58.2K-97-G1 (4.7k pullup)// 10 is 100k RS thermistor 198-961 (4.7k pullup)// 11 is 100k beta 3950 1% thermistor (4.7k pullup)// 12 is 100k 0603 SMD Vishay NTCS0603E3104FXT (4.7k pullup) (calibrated for Makibox hot bed)// 13 is 100k Hisens 3950 1% up to 300°C for hotend "Simple ONE " & "Hotend "All In ONE" // 20 is the PT100 circuit found in the Ultimainboard V2.x// 60 is 100k Maker's Tool Works Kapton Bed Thermistor beta=3950//// 1k ohm pullup tables - This is not normal, you would have to have changed out your 4.7k for 1k// (but gives greater accuracy and more stable PID)// 51 is 100k thermistor - EPCOS (1k pullup)// 52 is 200k thermistor - ATC Semitec 204GT-2 (1k pullup)// 55 is 100k thermistor - ATC Semitec 104GT-2 (Used in ParCan & J-Head) (1k pullup)//// 1047 is Pt1000 with 4k7 pullup// 1010 is Pt1000 with 1k pullup (non standard)// 147 is Pt100 with 4k7 pullup// 110 is Pt100 with 1k pullup (non standard)// 998 and 999 are Dummy Tables. They will ALWAYS read 25°C or the temperature defined below. // Use it for Testing or Development purposes. NEVER for production machine.// #define DUMMY_THERMISTOR_998_VALUE 25// #define DUMMY_THERMISTOR_999_VALUE 100#define TEMP_SENSOR_0 1 //各个挤出头的温度传感器类型(对应上面的注释,常见的为1),0是不使用#define TEMP_SENSOR_1 0#define TEMP_SENSOR_2 0#define TEMP_SENSOR_3 0 #define TEMP_SENSOR_BED 0 //热床#define HEATER_0_MINTEMP 5 //最低温度#define HEATER_1_MINTEMP 5#define HEATER_2_MINTEMP 5#define HEATER_3_MINTEMP 5#define BED_MINTEMP 5#define HEATER_0_MAXTEMP 275 //最高温度#define HEATER_1_MAXTEMP 275#define HEATER_2_MAXTEMP 275#define HEATER_3_MAXTEMP 275#define BED_MAXTEMP 150//注:如果定义了挤出头的热敏电阻但是使用的时候没插,打印机就会报错,但不定义可能会编译不成功。如果不想使用挤出头可以把挤出头温度传感器类型设为1,最低温度设为0//============================ 限位设置 ==========================const bool X_MIN_ENDSTOP_INVERTING = true; const bool Y_MIN_ENDSTOP_INVERTING = true; const bool Z_MIN_ENDSTOP_INVERTING = true; const bool X_MAX_ENDSTOP_INVERTING = true; const bool Y_MAX_ENDSTOP_INVERTING = true; const bool Z_MAX_ENDSTOP_INVERTING = true; // 坐标最大值和坐标最小值的限位开关的常开常闭设置(true为常开)//#define DISABLE_MAX_ENDSTOPS //取消最大坐标值限位 //#define DISABLE_MIN_ENDSTOPS //取消最小坐标值限位#define DISABLE_X false#define DISABLE_Y false#define DISABLE_Z false //在电机不工作时解锁电机#define DISABLE_E false //对于所有挤出机有效#define DISABLE_INACTIVE_EXTRUDER true //只解锁不工作的电机#define INVERT_X_DIR false #define INVERT_Y_DIR false #define INVERT_Z_DIR true #define INVERT_E0_DIR false #define INVERT_E1_DIR false #define INVERT_E2_DIR false #define INVERT_E3_DIR false //电机转动方向#define X_HOME_DIR -1#define Y_HOME_DIR 1#define Z_HOME_DIR 1//限位配置,1为最大坐标限位#define X_MAX_POS 250#define X_MIN_POS 0#define Y_MAX_POS 250#define Y_MIN_POS 0#define Z_MAX_POS MANUAL_Z_HOME_POS#define Z_MIN_POS 0 //喷头各轴的行程设置#define MANUAL_X_HOME_POS -32#define MANUAL_Y_HOME_POS 151#define MANUAL_Z_HOME_POS 190 //触发限位时各轴的坐标或角度,这里是初始值,后可用G代码修改//============================ 电机设置 ==========================#define HOMING_FEEDRATE {20*60, 20*60, 20*60, 0} //home时的速率#define DEFAULT_AXIS_STEPS_PER_UNIT {53.333333,44.444444,100,300} 移动单位长度或角度需要的脉冲数(对应X,Y,Z,E)#define DEFAULT_MAX_FEEDRATE {200, 200, 200, 25} // 最大速度#define DEFAULT_MAX_ACCELERATION {1000,1000,1000,1000} // 最大加速度#define DEFAULT_ACCELERATION 500 // 默认加速度#define DEFAULT_RETRACT_ACCELERATION 2000 //反转加速度//============================ 舵机设置 ==========================#define NUM_SERVOS 3 // 舵机个数//注:原固件中的舵机是给自动调平用的,如果要用g代码控制舵机需要自己添加Marlin固件算法修改
Marlin_main.cpp文件中
1.找到calculate_SCARA_forward_Transform(正解)和calculate_delta(反解)函数,修改成上面的算法。
2.找到代码的这个部分,在#ifdef SCARA中加入ManualHomePos[3]数组变量,这个数组储存的是各个轴触发限位时的相对坐标(也就是初始相对坐标的值)
#ifdef DELTAfloat delta[3] = { 0, 0, 0 };#define SIN_60 0.8660254037844386#define COS_60 0.5// these are the default values, can be overriden with M665float delta_radius = DELTA_RADIUS;float delta_tower1_x = -SIN_60 * delta_radius; // front left towerfloat delta_tower1_y = -COS_60 * delta_radius; float delta_tower2_x = SIN_60 * delta_radius; // front right towerfloat delta_tower2_y = -COS_60 * delta_radius; float delta_tower3_x = 0; // back middle towerfloat delta_tower3_y = delta_radius;float delta_diagonal_rod = DELTA_DIAGONAL_ROD;float delta_diagonal_rod_2 = sq(delta_diagonal_rod);float delta_segments_per_second = DELTA_SEGMENTS_PER_SECOND;#endif#ifdef SCARAfloat axis_scaling[3] = { 1, 1, 1 }; float ManualHomePos[3]={MANUAL_X_HOME_POS,MANUAL_Y_HOME_POS,MANUAL_Y_HOME_POS};float SCARA_offset[3]={SCARA_offset_x,SCARA_offset_y,SCARA_offset_z};#endif 3.找到写G28的那一段代码 ,添加如下代码,即把触发限位时各轴的相对坐标定义成实际的限位触发角度。
if(code_seen('G')){switch((int)code_value()){...case 28:...#ifdef SCARAcalculate_SCARA_forward_Transform(ManualHomePos);for(int8_t i=0; i < 3; i++){destination[i]=current_position[i]=delta[i];delta[i]=ManualHomePos[i];} plan_set_position(delta[X_AXIS], delta[Y_AXIS], delta[Z_AXIS], current_position[E_AXIS]);#endif ...break;}}Marlin固件中添加写入EEPROM的参数:
在ConfigurationStore.cpp文件中的Config_StoreSettings()、Config_RetrieveSettings()函数下添加以下 代码:(两个函数分别是写入和恢复参数设置)
#ifdef SCARAEEPROM_WRITE_VAR(i,SCARA_offset);//原点偏移量EEPROM_WRITE_VAR(i,ManualHomePos);//触发限位角度#endif在Config_ResetDefault()下添加:(此函数为恢复默认参数)#ifdef SCARASCARA_offset[X_AXIS] = SCARA_offset_x; SCARA_offset[Y_AXIS] = SCARA_offset_y;SCARA_offset[Z_AXIS] = SCARA_offset_z;ManualHomePos[X_AXIS] = MANUAL_X_HOME_POS;ManualHomePos[Y_AXIS] = MANUAL_Y_HOME_POS;ManualHomePos[Z_AXIS] = MANUAL_Z_HOME_POS;#endif在Marlin.h中定义
#ifdef SCARAextern float axis_scaling[3]; extern float SCARA_offset[3];extern float ManualHomePos[3]; #endifMarlin固件中添加自定义的G、M代码:
1.添加修改限位角度的M代码(M360)。找到写M代码的部分加入以下代码。
case 360:for(int8_t i=0; i < 3; i++){if(code_seen(axis_codes[i])) {ManualHomePos[i] = code_value();//把触发限位时的相对坐标设置成输入的值}}break;2.添加设置偏移量的M代码(M361)
case 361:for(int8_t i=0; i < 3; i++){if(code_seen(axis_codes[i])) {SCARA_offset[i] = code_value();}}break;3.添加控制舵机的G代码。首先要在 Configuration.h文件中定义舵机
case 5: // G5 servo contrlif (code_seen('A')) servos[0].write(code_value());//舵机A转动所输入的角度if (code_seen('B')) servos[1].write(code_value());if (code_seen('C')) servos[2].write(code_value());break;4.添加角度模式 。Marlin_main.cpp文件中添加角度模式的开关变量。
#ifdef SCARAfloat axis_scaling[3] = { 1, 1, 1 }; float ManualHomePos[3]={MANUAL_X_HOME_POS,MANUAL_Y_HOME_POS,MANUAL_Y_HOME_POS}; float SCARA_offset[3]={SCARA_offset_x,SCARA_offset_y,SCARA_offset_z};bool angle_mode=false;#endif 在G代码的case中添加case 95 。即使用G95代码切换角度模式和坐标模式。
case 95: angle_mode=!angle_mode;break;反解函数calculate_delta修改为如下,即角度模式为假进行坐标换算,为真不换算。
if(angle_mode==false){delta[X_AXIS] = SCARA_theta * SCARA_RAD2DEG; // Multiply by 180/Pi - Theta is support arm angle (shoulder)delta[Y_AXIS] = SCARA_psi * SCARA_RAD2DEG; // - Psi sub arm angle (elbow)delta[Z_AXIS] = cartesian[Z_AXIS]-SCARA_offset[Z_AXIS];}else{delta[X_AXIS] = cartesian[X_AXIS];delta[Y_AXIS] = cartesian[Y_AXIS];delta[Z_AXIS] = cartesian[Z_AXIS];}
5.添加当前坐标设定的G代码。原有固件在G92(case 92)代码中只能设置E轴的当前坐标。所以添加如下代码可以把机械手任意的位置设置成想要的坐标。
原理即修改坐标偏移量SCARA_offset[i]但不保存到固件
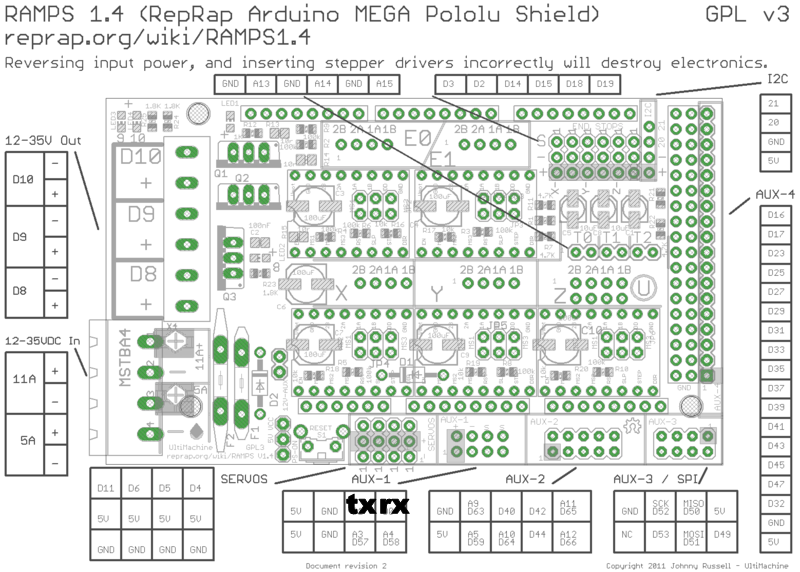
#ifdef SCARAif (i == X_AXIS || i == Y_AXIS||i == Z_AXIS) {SCARA_offset[i]=SCARA_offset[i]-current_position[i]+code_value();//新的坐标偏移量=旧的坐标偏移量-当前坐标+想要设定的坐标current_position[i] = code_value(); //设定当前坐标为输入的值}#endifRAMPS主板详解:
如果arduino2560用的是ams1117的稳压芯片,建议把二极管D1去掉,两个板子单独供电。
常用G、M代码:
M360 触发限位角度设置
M361 原点偏移设置
G5 舵机角度控制
G0 快速点定位
G1 直线插补
G4 延迟
G28 回归所有轴
G92 当前坐标设定
G95 切换绝对/相对坐标
M0 停止
M3 主轴正转
M4 主轴反转
M5 主轴停止
M17 启动步进电机
M20 读取SD卡
M21 初始化SD卡
M22 弹出SD卡
M23 选择SD卡的文件
M24 开始SD卡的打印
M25 暂停SD卡打印
M41 循环
M82 挤出机绝对坐标
M83 挤出机相对坐标
M84 解锁步进电机
M92 设置步进电机脉冲数
M101 正转挤出机
M102 反转挤出机
M104 设置挤出机温度
M105 获取温度
M106 打开风扇
M107 关闭风扇
M112 紧急停止
M114 获取当前坐标和角度
M119 获取限位开关状态
M201 设置最大打印速度
M202 设置最大移动速度
M203 设置电机最大速度
M204 设置默认加速度
M500 保存设置到EEPROM
M501 读取EEPROM中的配置
M502 恢复出厂设置
M503 读取出厂设置
转载于:https://my.oschina.net/u/3503462/blog/914027
基于marlin固件的SCARA机器人相关推荐
- 基于Marlin固件库桌面3D打印机软件开发
0 系统组成 1硬件 原理框图 2 软件开发平台 Arduino
- MKS MONSTER8 V1.0使用说明书(基于Marlin 2.0.X固件配置Voron 2.4)
广州谦辉信息科技有限公司 (基于Marlin 2.0.x 固件配置 Voron 2.4) 创客基地QQ群:489095605 232237692 邮箱:Huangkaida@makerbase.com ...
- Arduino简单实现两自由度Scara机器人
1.描述 两自由度Scara机器人有两个旋转关节,机器人的控制主要就是电机和末端执行器的控制.在学习marlin固件控制机器人时,由于marlin代码过于繁杂且许多代码都是关于3D打印,与机器人相关的 ...
- 四足机器人|机器狗|仿生机器人|多足机器人|Adams仿真|Simulink仿真|基于CPG的四足机器人Simulink与Adams虚拟样机|源码可直接执行|绝对干货!需要资料及指导的可以联系我!
四足机器人|机器狗|仿生机器人|多足机器人|基于CPG的四足机器人Simulink与Adams虚拟样机|源码可直接执行|绝对干货!需要资料及指导的可以联系我!QQ:1096474659 基于CPG的四 ...
- Marlin固件之二:源代码详解与移植
由于需要进行固件定制化,Marlin固件太过于强大和紧凑,我对这个固件进行了裁剪,只剩下主枝干,实现功能的定制和裁剪.以下的代码详解是基于我已经移植在stm32上面的一个程序进行的.
- MKS MONSTER8 V1.0使用说明书(基于Klipper 固件配置 Voron 2.4)
广州谦辉信息科技有限公司 MKS MONSTER8 V1.0使用说明书 (基于Klipper 固件配置 Voron 2.4) 创客基地QQ群:489095605 232237692 邮箱:Huangk ...
- FANUC、ABB、YASKAWA、SCARA机器人入门书籍整理
1.工业机器人入门实用教程(FANUC机器人) 本书基于FANUC工业机器人,从机器人应用过程中需要找我的技能触发,由浅入深.循序渐进地介绍了FANUC机器人实用入门知识. 2.工业机器人入门实用教程 ...
- SCARA机器人在螺丝锁付机中的应用
摘要:根据SCARA机器人的特点,设计了基于SCARA机器人的自动化螺丝锁付机.该锁付机采用了可编程逻辑控制器作为主控单元,控制器发出指令控制SCARA关节机器人的运行动作.基于SCARA机器人螺丝锁 ...
- scara机器人动荷载_SCARA机器人结构设计及轨迹规划算法.pdf
第31卷第7期 合肥工业大学学报(自然科学版) V01.31No.7 HEFEI TECHNoIoGY 2008年7月 JOURNAL0F I小rn咂RSrrY0F Jul.2008 SCARA机器人 ...
- 大盘点|基于RGB图像下的机器人抓取
点击上方"3D视觉工坊",选择"星标" 干货第一时间送达 前言 近期读取了一些最新基于RGB图像下的机器人抓取论文,在这里分享下思路. 1.Optimizing ...
最新文章
- 使用深度学习和OpenCV的早期火灾检测系统
- php高版本安装ecshop错误解决方法
- CODING 2.0 企业级持续交付解决方案
- 2020年Q3笔记本电脑出货量:惠普反超联想居首位 苹果第四
- 2018-07-20
- 通达信资金净流入公式_资金净流入公式——股票实战技术指标公式研究有缘看本博定多活30年——东方财富网博客...
- 1.7 Go语言和其它编程语言的对比
- java intern 与本身_java intern
- 从北京回来的年轻人,我该告诉你点什么? 1
- android 动漫头像,动漫卡通头像制作
- 猫哥教你写爬虫 040--存储数据-作业
- kali linux无线驱动安装,Kali Linux 安装WIFI无线网卡驱动:rtl8822bu 教程
- 公共自行车点查询_基于预测信息的公共自行车查询系统设计
- webm格式如何转换成mp4格式?
- 知识体系:如何构建自己的知识体系
- ORB_SLAM2、ORB_SLAM3跑EuRocKITTI数据集及evo评估
- v12.2.8 released版本介绍--2019_7
- 7-2 求π的近似值
- html5知识点:HTML5新特性
- AD打印 processing page 1019 of 2 layer很慢