ROS示例----TIAGo教程
![]()
![]()
![]()
![]()
![]()
![]()
------
![]()
------
教程安装
|
|

控制
|
|
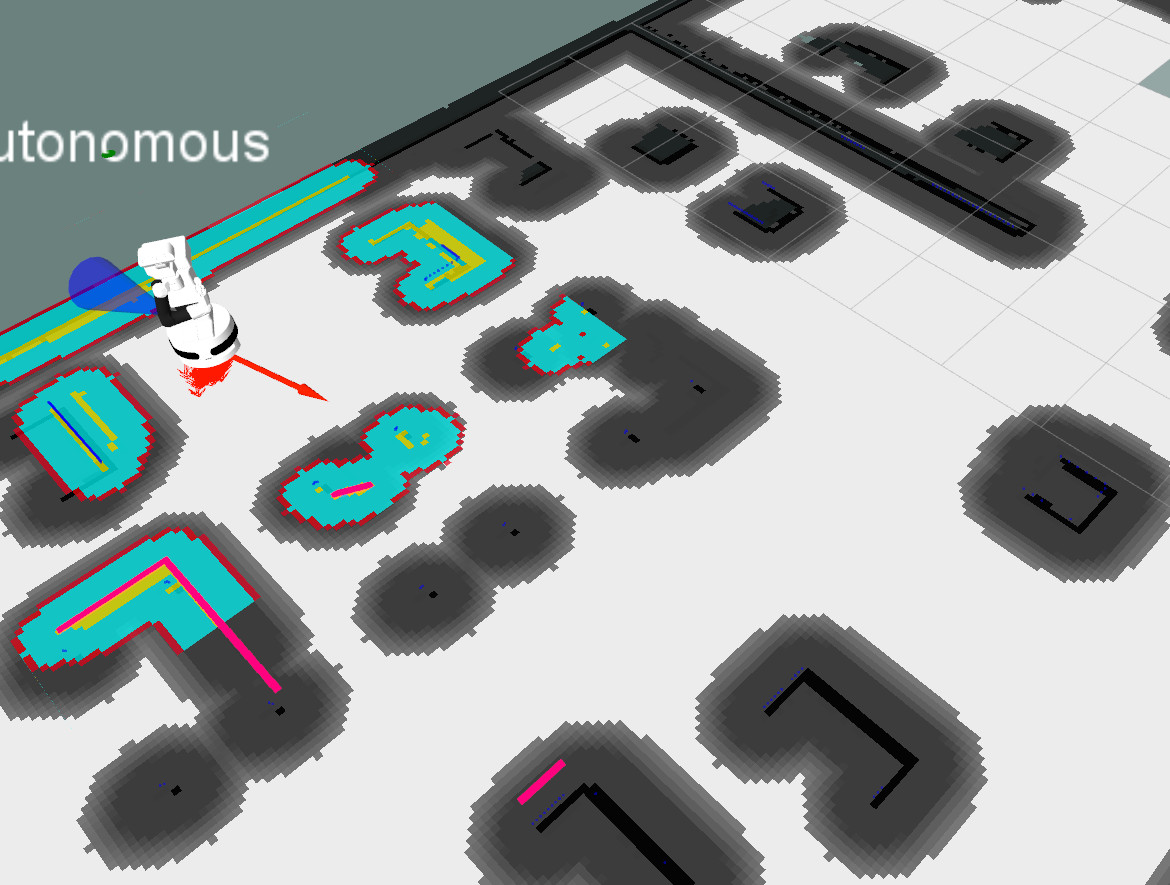
自主导航
|
|
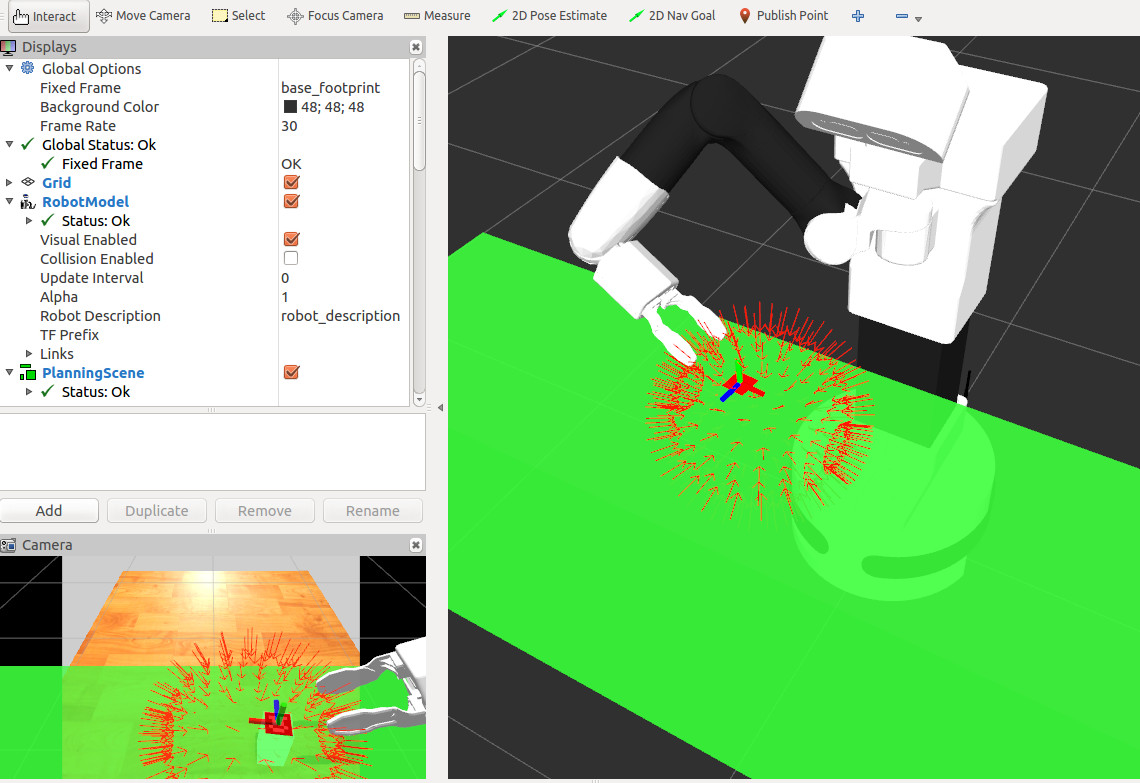
MoveIt!
|
|
OpenCV
|
|
点云
|
|

------
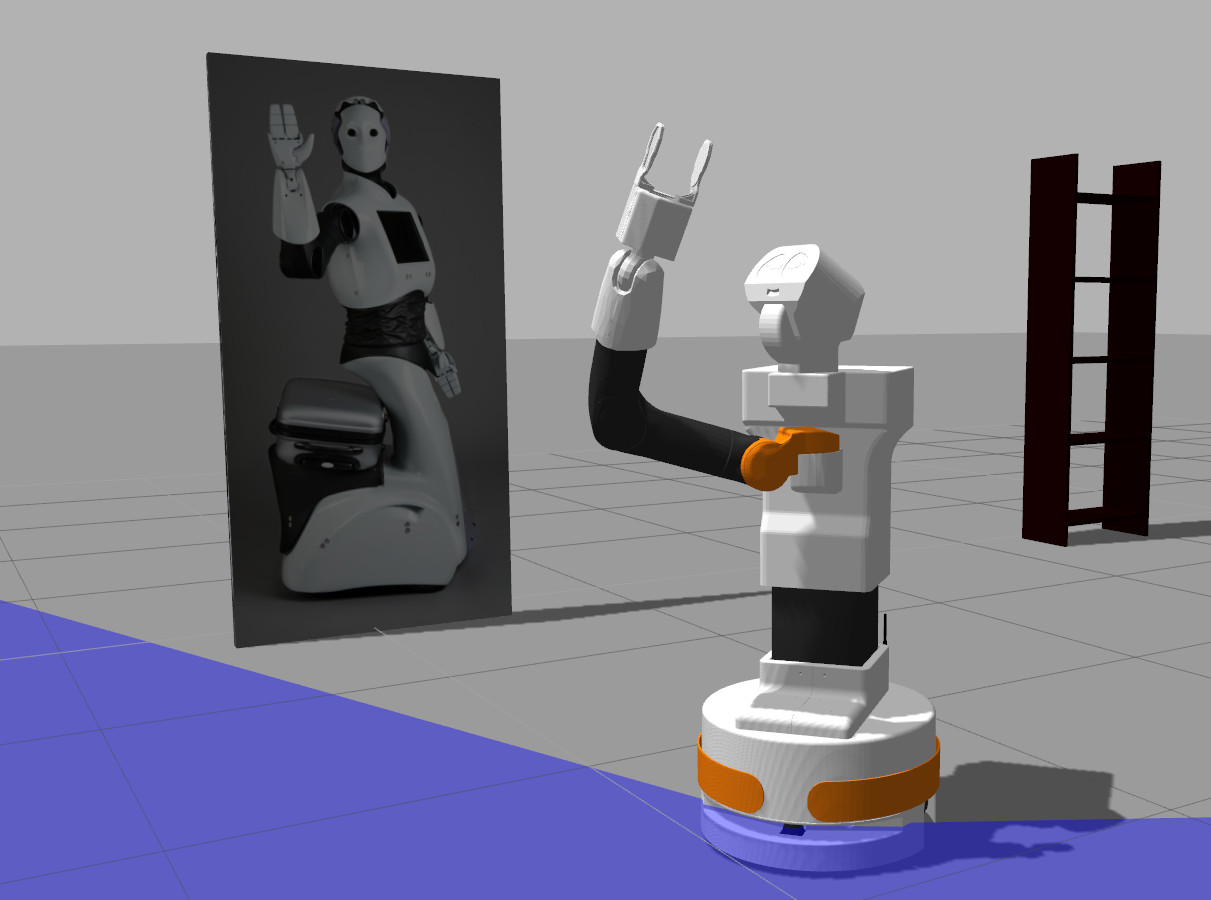
一张图片胜过千言万语:
教程
TIAGo机器人在机器人/ TIAGo /教程中提供了一套全面的教程。教程使用Gazebo模拟器,目前包含如何使用OpenCV,PCL,自主导航,MoveIt的教程!和人机器人互动。
公共仿真包概述
本节概述了在TIAGo的公共模拟中使用的软件包,以及指向描述软件包的相应wiki页面的链接。有关软件包的安装说明,请参考TIAGo模拟安装教程。
机器人模型
|
零件 |
ROS包/堆栈 |
|
机器人模型(URDF) |
tiago_description |
|
移动基本模型(URDF) |
pmb2_description |
|
夹具模型(URDF) |
pal_gripper_description |
|
Hey5手模型(URDF) |
hey5_description |
模拟文件
|
机器人带来的文件 |
tiago_bringup |
|
机器人凉亭模型,世界和启动脚本 |
tiago_gazebo |
|
Gazebo的机器人控制器配置 |
tiago_controller_configuration_gazebo |
|
Gazebo的移动基础控制器配置 |
pmb2_controller_configuration_gazebo |
|
Gazebo插件 |
pal_gazebo_plugins |
公共航海
|
零件 |
ROS包/堆栈 |
|
导航配置和启动文件 |
tiago_2dnav_gazebo |
|
导航元包 |
tiago_navigation |
|
映射和定位状态机 |
pal_navigation_sm |
硬件用于仿真的驱动程序
|
零件 |
ROS包/堆栈 |
|
硬件驱动程序 |
pal_hardware_gazebo |
消息
|
零件 |
ROS包/堆栈 |
|
PAL特定消息 |
pal_msgs |
控制器
|
零件 |
ROS包/堆栈 |
|
ros_control覆盖 |
ros_control |
|
ros_controllers覆盖 |
ros_controllers |
|
gazebo_ros_control overlay |
gazebo_ros_control |
高级功能
|
零件 |
ROS包/堆栈 |
|
播放预定义的动作 |
play_motion |
|
点头动作 |
head_action |
|
MoveIt!包 |
tiago_moveit_config |
|
ArUco标记检测 |
aruco_ros |
相关存储库
PAL机器人GitHub组织
------
------
ROS示例----TIAGo教程相关推荐
- ROS示例----导航功能包Husky_exploration
ROS导航功能包示例husky amcl gmapping slam exploration 此功能包包含如下文件: 结构如下: $ tree -L 2 . ├── CMakeLists.txt -& ...
- ROS入门21讲 | ROS机器人入门教程 【简明笔记】
古月·ROS入门21讲 | 一学就会的ROS机器人入门教程 文章目录 ROS核心概念 ROS命令行 工作空间与功能包 订阅与发布 发布者 Publisher 订阅者 Subscriber 话题消息的自 ...
- ROS SMACH基础教程(一)
ROS SMACH 基础教程 1.SMACH介绍 当机器人在执行一些复杂的计划时,SMACH将变得很有用,它可以将可能的状态和状态状态转移过程简化,将不同的任务模块整合到一起,让机器人实现复杂的任务调 ...
- 24个很酷的 CSS3 文本效果示例及教程
CSS3 是对 CSS 规范的一个很大的改善和增强,它使得 Web 开发人员可以很容易的在网站中加入时尚的效果.今天这篇文章收集了24个很棒的 CSS3 文本效果示例及教程分享给大家. Text wi ...
- Ubuntu14.04 ROS Indigo安装教程,以及卸载方法
Ubuntu14.04 ROS Indigo安装教程,以及卸载方法 原创 2017年01月25日 15:22:45 标签: ROS / ubuntu / 机器人 13957 ROS (Robot Op ...
- 【一学就会的ROS基础入门教程 】03-1 ROS基础编程:ROS工作空间的创建、话题topic的发布与接收、以及话题消息的自定义使用
[一学就会的ROS基础入门教程 ]03-1 ROS基础编程:ROS工作空间的创建.话题topic的发布与接收.以及话题消息的自定义使用 文前白话 1.创建工作空间与功能包 关于工作空间的介绍 创建开发 ...
- 软路由工具(ROS, m0n0wall),教程大收集
软路由工具(ROS, m0n0wall),教程大收集! 网吧主页,在线大头贴,VOD影视系统,留言本大收集! http://bj.bbs.txwm.com/dispbbs.asp?BoardID=19 ...
- 【ROS wiki】ros wiki官方教程与ROS wiki页面检索
ROS wiki系列文章简介:ROS wiki系列文章是本人ROS专栏下的子专题.该系列文章主要用来介绍:ROS初学者如何利用好ROS官方提供的ROS wiki平台,来查询ROS资料,了解ROS包的功 ...
- 来了!STM32移植LuatOS,潘多拉示例全新教程
进击的五月,继上期<使用Air724UG制作简易贪吃蛇>教程之后,@打盹的消防车 又为大家带来基于STM32的潘多拉LuatOS移植全新教程: 为什么使用潘多拉作为教程呢? STM32不能 ...
最新文章
- 了解大数据的特点、来源与数据呈现方式
- vs报错 已经在 helpers.obj 中定义
- 红外线接受程序 理解
- mysql严格模式 报错_代码一上传服务器就报错-尝试开启 MySQL 严格模式
- 微软面向初学者的机器学习课程:1.4-机器学习技术
- 一个新实验:使用gRPC-Web从浏览器调用.NET gRPC服务
- 使用 ReSharper,输入即遵循 StyleCop 的代码格式化规范
- java中的asList_Java中的Arrays.asList()方法
- HDU-3729 二分匹配 匈牙利算法
- struts单例模式 java_Java单例设计模式详细介绍
- 2017年BackBox5和Ubuntu16.04.1国内更新源
- 联发科mt8516价格_联发科MT8516销量破两亿:揭秘背后的故事
- 宝贝对不起,放下工作养不起你,拿起工作陪不了你…
- Proxmox VE7.3+Ceph超融合私有云建设案例(低成本高价值,拿走不谢)
- Android中list常用方法,Android中的常用控件及其基本用法
- 港科夜闻|香港科技大学与英国思克莱德大学深化研究合作
- C语言:va_list
- 【MIKE水动力】MIKE11基本原理
- 毕业论文参考文献规范格式
- 关于thinkpad安装windows7屏幕亮度调节的解决方案