ROS Navigation-----amcl简介
amcl是一种概率定位系统,以2D方式对移动机器人定位。 它实现了自适应(或者KLD-采样)蒙特卡洛定位法,使用粒子滤波跟踪机器人在已知地图中的位姿。
1 算法
概率机器人一书中讲述了许多算法以及它们使用的参数,建议读者去书中查看以获得更多细节信息。 这里我们用到书中的算法包括:sample_motion_model_odometry,beam_range_finder_model,likelihood_field_range_finder_model,Augmented_MCL, andKLD_Sampling_MCL。
基于目前现有的实现的话, 这个node仅能使用激光扫描和扫描地图来工作,但是可以进行扩展以使用其它传感器数据。
2 示例
在base_scan topic上使用激光数据定位:
amcl scan:=base_scan
3 节点
3.1 amcl
amcl节点输入激光地图,激光扫描,和tf转换信息,输出位姿估计。 amcl在启动时候依据提供的参数完成粒子滤波器初始化。但是需要注意,如果没有指定参数值,使用默认参数的话,初始的滤波器状态将是中心为(0,0,0)含有中等尺度大小粒子的云。
3.1.1 Subscribed Topics
scan ( sensor_msgs/LaserScan)
- 激光扫描
tf ( tf/tfMessage)
- 坐标转换信息
initialpose ( geometry_msgs/PoseWithCovarianceStamped)
- 用来初始化粒子滤波器的均值和协方差
map ( nav_msgs/OccupancyGrid)
- 当参数use_map_topic被设置后, AMCL订阅map主题以获取地图完成基于激光的定位
3.1.2 Published Topics
amcl_pose ( geometry_msgs/PoseWithCovarianceStamped)
- 估计的机器人在地图中的位姿,使用协方差表示
particlecloud ( geometry_msgs/PoseArray)
- 粒子滤波器维护的位姿估计集合
tf ( tf/tfMessage)
- 发布从里程(可以使用参数~odom_frame_id进行重映射)到地图的转换
3.1.3 Services
global_localization ( std_srvs/Empty)
- 初始化全局定位,所有粒子被随机撒在地图上的free空间
3.1.4 Services Called
static_map ( nav_msgs/GetMap)
- amcl调用该服务用来定位, 通过这个service启动模块有了地图
3.1.5 Parameters
有3种ROS 参数用来配置amcl node: overall filter, laser model, and odometery model
1)Overall filter parameters
~min_particles (int, default: 100)
- 允许的最少粒子数
~max_particles ( int, default: 5000)
- 允许的最多粒子数
~kld_err ( double, default: 0.01)
- 真实分布与估计分布之间最大误差
~kld_z ( double, default: 0.99)
- Upper standard normal quantile for (1 - p), where p is the probability that the error on the estimated distrubition will be less thankld_err.
~update_min_d ( double, default: 0.2 meters)
- 执行一次滤波器更新所需的平移距离
~update_min_a ( double, default: π/6.0 radians)
- 执行一次滤波器更新所需的旋转角度
~resample_interval ( int, default: 2)
- 重采样之前滤波器更新次数
~transform_tolerance ( double, default: 0.1 seconds)
- Time with which to post-date the transform that is published, to indicate that this transform is valid into the future.
~recovery_alpha_slow ( double, default: 0.0 ( disabled))
- Exponential decay rate for the slow average weight filter, used in deciding when to recover by adding random poses. A good value might be 0.001.
~recovery_alpha_fast ( double, default: 0.0 ( disabled))
- Exponential decay rate for the fast average weight filter, used in deciding when to recover by adding random poses. A good value might be 0.1.
~initial_pose_x ( double, default: 0.0 meters)
- Initial pose mean (x), used to initialize filter with Gaussian distribution.
~initial_pose_y ( double, default: 0.0 meters)
- Initial pose mean (y), used to initialize filter with Gaussian distribution.
~initial_pose_a ( double, default: 0.0 radians)
- Initial pose mean (yaw), used to initialize filter with Gaussian distribution.
~initial_cov_xx ( double, default: 0.5*0.5 meters)
- Initial pose covariance (x*x), used to initialize filter with Gaussian distribution.
~initial_cov_yy ( double, default: 0.5*0.5 meters)
- Initial pose covariance (y*y), used to initialize filter with Gaussian distribution.
~initial_cov_aa ( double, default: (π/12)*(π/12) radian)
- Initial pose covariance (yaw*yaw), used to initialize filter with Gaussian distribution.
~gui_publish_rate ( double, default: -1.0 Hz)
- 指定最大可用多大速率(Hz)扫描并发布用于可视化的路径, -1.0 to disable
~save_pose_rate ( double, default: 0.5 Hz)
- 指定存储上次估计的位姿和协方差到参数服务器的最大速率 (Hz),存储变量为 ~initial_pose_* and ~initial_cov_*。保存的位姿会在后面初始化滤波器时候使用。 -1.0 to disable
~use_map_topic ( bool, default: false)
- 如果设置为true, AMCL将订阅地图主题,不会使用service call获取地图。New in navigation 1.4.2
~first_map_only ( bool, default: false)
- 如果设置为true,AMCL将使用订阅到的第一个地图,不会使用每次更新获取的新地图。New in navigation 1.4.2
2)Laser model parameters
注意:无论使用什么混合权重,权重加总应该等于1。 beam model使用了所有的4种权重: z_hit, z_short, z_max, and z_rand。likelihood_field model仅仅使用了2种: z_hit and z_rand。
~laser_min_range (double, default: -1.0)
- 最小扫描范围; -1.0 will cause the laser's reported minimum range to be used.
~laser_max_range ( double, default: -1.0)
- 最大扫描范围; -1.0 will cause the laser's reported maximum range to be used.
~laser_max_beams ( int, default: 30)
- 当更新滤波器时候,每次扫描有多少均匀分布(等间隔的)beam被使用
~laser_z_hit ( double, default: 0.95)
- 模型z_hit部分混合权重
~laser_z_short ( double, default: 0.1)
- 模型z_short部分混合权重
~laser_z_max ( double, default: 0.05)
- 模型z_max部分混合权重
~laser_z_rand ( double, default: 0.05)
- 模型z_rand部分混合权重
~laser_sigma_hit ( double, default: 0.2 meters)
- 模型z_hit部分使用的高斯模型标准差混合权重
~laser_lambda_short ( double, default: 0.1)
- 模型z_short部分指数衰减参数
~laser_likelihood_max_dist ( double, default: 2.0 meters)
- Maximum distance to do obstacle inflation on map, for use in likelihood_field model.
~laser_model_type ( string, default: "likelihood_field")
- 模型类型(beam, likelihood_field或者likelihood_field_prob) (same aslikelihood_field but incorporates the beamskip feature, if enabled).
3 ) Odometry model parameters
如果参数~odom_model_type是"diff",那么使用sample_motion_model_odometry算法,这种模型使用噪声参数odom_alpha_1到odom_alpha4。
如果参数~odom_model_type 是"omni",那么使用客制化模型用于全向底座,使用噪声参数odom_alpha_1到odom_alpha_5。前4个参数类似于“diff”模型,第5个参数用于捕获机器人在垂直于前进方向的位移(没有旋转)趋势。
由于就模型有bug,解决了bug的新模型使用了新的类型"diff-corrected" 和"omni-corrected"。参数odom_alpha缺省值仅仅适合旧的模型,对于新的模型这些值要小很多,请参考seehttp://answers.ros.org/question/227811/tuning-amcls-diff-corrected-and-omni-corrected-odom-models/。
~odom_model_type (string, default: "diff")
- 模型类型("diff", "omni", "diff-corrected" or"omni-corrected")
~odom_alpha1 ( double, default: 0.2)
- 指定里程旋转估计(机器人运动旋转分量)中期望的噪声
~odom_alpha2 ( double, default: 0.2)
- 指定里程旋转估计(机器人运动位移分量)中期望的噪声
~odom_alpha3 ( double, default: 0.2)
- 指定里程位移估计(来自机器人运动位移分量)中期望的噪声
~odom_alpha4 ( double, default: 0.2)
- 指定里程位移估计(来自机器人运动旋转分量)期望噪声
~odom_alpha5 ( double, default: 0.2)
- 位移相关噪声参数 (only used if model is"omni").
~odom_frame_id ( string, default: "odom")
- odometry使用的坐标系
~base_frame_id ( string, default: "base_link")
- 基座坐标系
~global_frame_id ( string, default: "map")
- 全局坐标系
~tf_broadcast ( bool, default: true)
- 设置为false,amcl将不会发布全局坐标系和里程坐标系之间的转换
3.1.6 Transforms
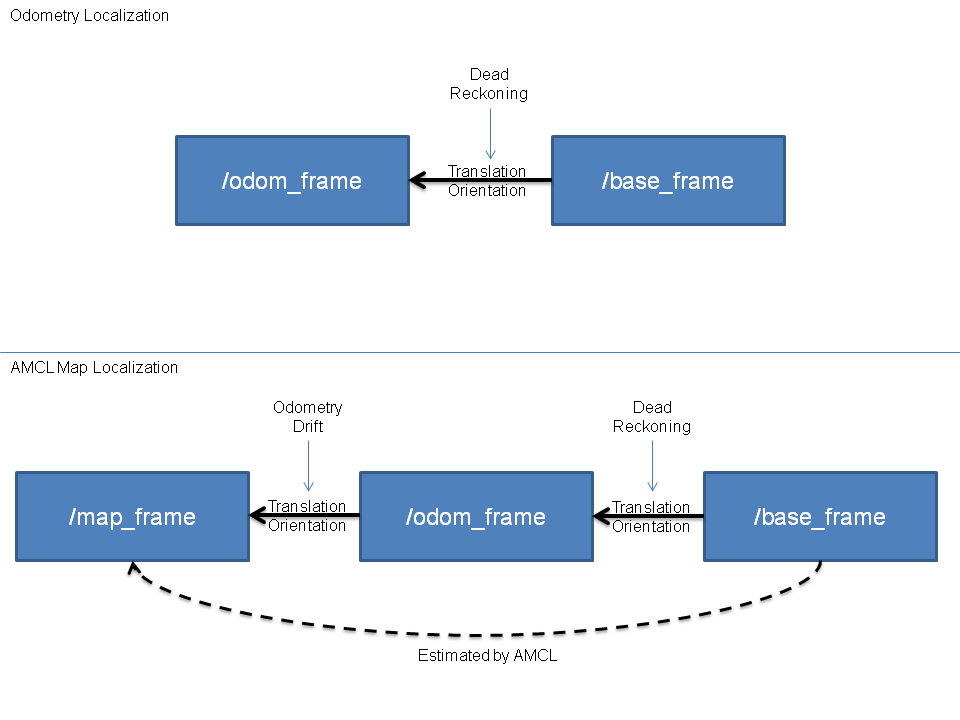
amcl要把进来的激光扫描信息转换到里程坐标系 (~odom_frame_id)。因此,tf树中必定会存在一条从发布激光的坐标系到里程坐标系的路径。
实现细节是:amcl第一次收到激光扫描后,它会查看激光坐标系与基座坐标系之间的转换,并永久的记下这种转换。因此,amcl不能用在相对于基座有相对位移的激光器。
下图显示了使用odomery和amcl定位的差异。在转换过程,amcl会评估基座坐标系(~base_frame_id)相对于全局坐标系(~global_frame_id)的转换,但是它仅发布了全局坐标系和里程坐标系(~odom_frame_id)之间的转换,这种转换过本质上是为解决使用里程航迹推演出现的累计漂移。AMCL发布的转换可能带有未来时间戳,但是对AMCL来说是有效的。
ROS Navigation-----amcl简介相关推荐
- ros navigation 中的amcl编译和运行
ros 中的navigation可以根据机器人自动实现路径规划,自主定位.其中的amcl实现了一种基于蒙特卡洛的粒子滤波定位方法. 本文测试环境为ubuntu18.04 + ros melodic. ...
- 理解ROS Navigation Stack,看完这篇你就知道啦!
前言 ROS Navigation Stack是ROS提供的一个二维的导航功能包集合,通过输入里程计.传感器信息和目标位姿,输出控制机器人到达目标状态的安全速度指令.ROS Navigation St ...
- 【硬核】 ROS Navigation 局部路径规划常见算法
简介 最近,作者参加了关于RMUS 高校 SimReal挑战赛,首次接触到了机器人导航领域,这里记录一下这段时间的收货.sim2real的全称是simulation to reality,是强化学 ...
- ROS Navigation Stack安装
ROS Navigation Stack安装 Navigation导航包是做导航几乎都要用的,大家可以先去ROS Wiki上学习下 我们先Git下对应版本的软件包,我是Kinetic的,所以是Kine ...
- ROS Navigation Tuning Guide(导航调试指南)
ROS Navigation Tuning Guide 导航调试指南 准备工作 距离传感器 里程计 定位 速度与加速度的设置 获得最大速度 获得最大加速度 设置最小值 XY方向的速度 Global P ...
- ROS : Navigation 基于碰撞传感器、悬崖传感器的实时避障 [kobuki]
ROS : Navigation 基于碰撞传感器.悬崖传感器的实时避障 [kobuki] 话题消息 碰撞传感器 悬崖传感器 点云数据 传感器详细信息 基于碰撞传感器.悬崖传感器的实时避障 转点云数据源 ...
- ROS Navigation插件注册自定义导航避障算法
前言 最近开组会的时候,导师催促我寻找创新点,着实让我头疼.因为说实话,我真的不想找什么创新点,我只想学习一些招聘简历上的技能类的东西,比如熟悉A*.Dijkstra和DWA导航避障算法,熟悉ROS, ...
- ROS Navigation之amcl源码解析(完全详解)
转载于:https://haoqchen.site/2018/05/06/amcl-code/ 0. 写在最前面 本文持续更新地址:https://haoqchen.site/2018/05/06/a ...
- ROS navigation调试基础(实现真实机器人导航)
最近使用了一下ROS中非常经典的导航包navigation.并通过自己的激光雷达以及相机里程计驱动了自己的小车在室内进行简单的定位以及导航.在此记录一下以免后期忘记. 1.导航包安装 ROS中navi ...
- ROS Navigation之map_server完全详解
0. 写在最前面 建议收藏: 本文持续更新地址:https://haoqchen.site/2018/11/27/map_server/ 本文将介绍自己在看ROS的Navigation stack中的 ...
最新文章
- 使用GDAL将12bit量化图像转为16bit或者8bit
- 2021-02-21 Python Easyocr 图片文字识别
- BZOJ1801: [Ahoi2009]chess 中国象棋
- 欢乐纪中A组赛【2019.8.17】
- Win11锁屏快捷键是什么 Win11锁屏的方法
- TensorFlow tf.squeeze
- 期刊(Journal)、会议(Conference)及其影响因子(Impact Factor)
- 免费python自学攻略-Python自学攻略
- 重装系统后没有网卡驱动
- 金鳞岂是池中物,一遇风云便化龙
- 没键盘计算机能启动吗,实现PC电脑无键盘鼠标开机
- ES6中import * as xxx from 'xxx'的作用
- 百度二级域名大全 目前为234个http://www.twocity.cn/blog/article.asp?id=818
- 8个身家百万的儿童创业者
- csgo修改服务器时间,csgo热身时间参数指令 热身时间怎么改
- maya python插件_Maya Python - ALembic导入导出助手
- 从零开始学架构——异地多活架构
- 什么才是真正的大数据征信?
- 唐骏的八大“职业经理潜规则”辨析
- Linux串口权限与udev理解