Momenta 陈凯:从人才角度看 L4 无人驾驶的实现 | AI 研习社职播间第 4 期(附 Momenta 招聘解读)...
雷锋网 AI 科技评论按:目前全球汽车行业公认由美国高速公路安全管理局(NHTSA)和国际自动机工程师学会(SAE)提出的的分级制度,把自动驾驶分成 L0 到 L5 级,分别承担相应的职责,而 L4 作为级别第二高的无人驾驶,是指在特定场景下(如高速公路)可以在完全没有人干预时进行全自动无人驾驶,到现在为止,实现 L4 无人驾驶依旧是人工智能领域最具挑战性、最复杂的难题之一。
近日,在雷锋网 AI 研习社第 4 期职播间上,中国最高估值自动驾驶创业公司 Momenta M4U 技术负责人陈凯深度分享了自动驾驶独角兽 Momenta 如何「打造自动驾驶大脑」,并解读实现 L4 级别的自动驾驶需要怎样的技术与人才。
陈凯:Momenta L4 技术负责人,中国科学技术大学博士,RoboCup@Home League 2014 世界冠军,多年从事机器人研究和相关工作。
分享主题:从人才角度看 L4 无人驾驶的实现(附 Momenta 招聘解读)
分享提纲:
1、Momenta 团队介绍:打造自动驾驶大脑
2、三大平台实现大数据与 AI 算法的反馈闭环
3、Momenta 核心技术的实现:基于深度学习的环境感知、高精度地图、驾驶决策算法
4、实现 L4 级别的自动驾驶需要怎样的技术与人才
雷锋网(公众号:雷锋网) AI 研习社将其分享内容整理如下:
今天主要在这里跟大家分享一下 Momenta 的技术路线,另外会重点介绍一下 L4 级别无人驾驶的人才需求。
Momenta 团队介绍:打造自动驾驶大脑
Momenta 的公司定位是打造自动驾驶大脑,简单来说,大脑就是跑在无人驾驶系统中的软件。下图是公司的核心团队:

CEO 曹旭东,清华大学毕业,在人工智能行业积攒了近 10 年的研发和管理经验。他曾在 CVPR/ICCV/ECCV 等计算机视觉顶级会议发表论文数十篇,并曾在美国 National Data Science Bowl 比赛拿下全球亚军。在创办 Momenta 之前,曹旭东曾任商汤科技执行研发总监,率领百人研发团队,具有丰富的管理经验及产品落地经验。在加入商汤科技之前,曹旭东任职微软亚研研究员,其研发技术广泛用于 Xbox、Bing、How-old 等知名产品,其中现象级产品 How-Old 有着数亿用户。
研发总监任少卿,中国科技大学和微软亚洲研究院联合培养博士。任少卿先生是当前最流行的物体检测框架 Faster-RCNN 的第一作者、当前最有影响力的深度学习网络结构 ResNet 的第三作者,同时也曾获得 ImageNet 2015 物体检测、图像分类、物体定位冠军,MS COCO 2015 多项比赛冠军,及 CVPR 2016 最佳论文等众多荣誉。
研发总监夏炎,中国科技大学和微软亚洲研究院联合培养博士,深度学习和大数据领域专家。在 Bing 等知名产品中,都有应用夏博士的研发成果。
研发总监孙刚,中国科学院计算机视觉博士,高性能并行计算系统专家,大规模图像识别专家。孙刚先生曾获 ImageNet 2016 场景分类亚军、ImageNet 2017 图像分类冠军,并曾参与设计世界上首个针对深度学习的 GPU 训练集群。
此外,Momenta 的团队成员主要来源于 MIT、CMU、清华大学、北京大学、中国科学技术大学等国内外高校及研究机构,以及 Google、Amazon、Facebook、微软亚洲研究院、腾讯等知名高科技公司,拥有深厚的技术积累、极强的技术原创力和丰富的行业经验。
Momenta 是一家拥有世界级研发能力的公司。下面是深度学习领域中比较有名的三项成果,都出自于 Momenta 的核心团队成员。
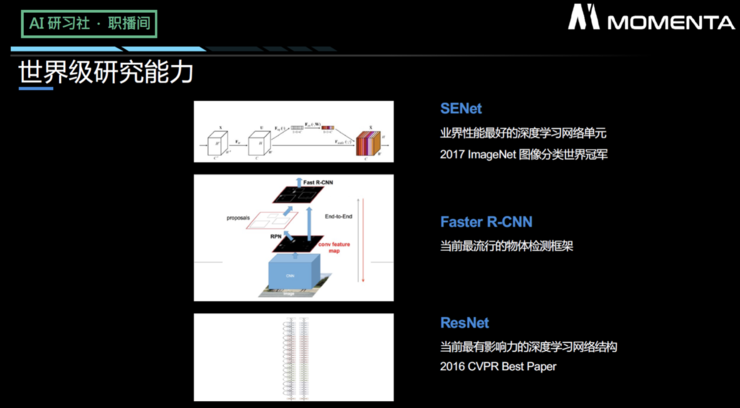
第一个是 SENet,它是业界性能最好的深度学习网络单元,Momenta 也凭借 SENet 获得 2017 年 ImageNet 图像分类世界冠军。
第二个是 Faster R-CNN,任少卿是其作者,它是引用频率最高的物体检测框架,Momenta 在此基础上做了很多改进。
第三个是 ResNet,它是当前最有影响力的深度学习网络结构,这篇论文也获得了 2016 年 CVPR 的 Best Paper。
这 3 项研究成果相关的论文引用数已经超过 17000 次;同时,团队还拿下 ImageNet 2015 物体检测、图像分类、物体定位冠军,MS COCO Challenge 2015 冠军,ImageNet 2017 图像分类冠军等一系列国际顶级赛事的奖项。
Momenta 的定位是打造自动驾驶大脑,始终专注于在人工智能方面的软件和算法的实现上。
Momenta 的技术包括三大模块:
基于深度学习的环境感知。它主要解决的问题就是,无人驾驶车辆可以感知它身边的一些物体,包括静态的路面、路牌以及动态的车辆、行人、自行车等等。

高精度地图。不同于人类司机,无人驾驶汽车在道路上运行时非常依赖于高精度地图,这样它才能知道其正处于什么样的位置、要到达的位置与当前位置有什么样的关系,并根据定位和信息去做较为精准的导航,最终自动前往目的地。

驾驶决策算法。驾驶决策由数据推动,类似于建立一个拥有 1000 亿公里驾驶经验的智能司机。通过众包路测,Momenta 获得了高精度语义地图中海量的驾驶轨迹。通过对海量驾驶轨迹的学习,Momenta 的算法可以根据当前环境感知和高精度地图信息,做出驾驶决策规划。

基于这些技术,Momenta 开发了不同级别的自动驾驶方案,而底层技术之前是有很强的通用性的,后面我再具体介绍。
底层平台实现大数据与 AI 算法的反馈闭环
接下来介绍一下如何运用大数据和大计算平台实现大数据与 AI 算法的反馈闭环。
1. 大计算平台,它是支撑 Momenta 去训练得到一个比较好的模型所需要的基础能力,主要是针对深度学习的 GPU 训练系统。在创立以来的两年多时间里,团队不断优化训练平台,在 2018 年上半年,Momenta 的自有平台已有数千块的 GPU,这个数量在创业公司以及大公司内部都是一个非常大的规模。不过仅拥有这么多数量的 GPU 是远远不够的,团队也设计了一种分布式深度学习训练系统 ROCS,它针对深度学习做了很多优化,包括跨服务器间高速信息传输、优秀的存储优化,其基于该系统和 SENet,助力了加速产品迭代过程。这一训练系统的几大特点是:稳定、高效、软硬件协同优化、易用。
2. 大数据平台,指的是百亿公里数据采集能力。Momenta 利用众包的思路积累驾驶相关的数据。不同车辆所面临的路况、天气和光照情况在不同的城市千差万别,积累下来的数据能更好地助力感知算法的研发。数据来源于产品,通过多渠道收集来的数据,能让技术得到更好的迭代,有助于提升产品的质量和性能,最后形成良性的闭环。
拿到这么多数据后,并不能直接接到大数据平台,中间会有一些步骤:
第一步是数据采集,通过产品采集数据;
第二步是数据筛选,数据回收后,其中有一些数据是没用的,所以需要将一些没用的、模糊的数据挑选出来去掉;
第三步是对有效数据的数据标注,数据系统实际已经使用了 Momenta 精准的算法去进行检测,而这些算法能大大提高标注效率,不需要从 0 开始进行标注;
第四步,数据接入到 Momenta 的大数据平台上,进行模型训练。
训练过程其实是非常需要消耗存储和计算资源的,因此内部也有一套在线远程众包数据标注系统,能利用训练结果模型帮助数据筛选,并用算法辅助数据半自动化标注。加入 Momenta 的同学也有机会接触到这些项目,自己的一些想法也有机会去实践并验证。
另外值得一提的是深度学习算法模型,Momenta 能将性能好的模型更好地集成到产品中。在模型精度几乎不受损的情况下,让模型计算速度提升 10-100 倍,同时将模型尺寸压缩 100 倍,让模型在时间和空间上都有两个数量级的提升,并让训练出来的模型更好地放入车载嵌入式平台等低计算、低功耗的平台上,从而更易于产品化。
此外,公司内部还有仿真平台,用到了非常专业的物理仿真引擎,可对车辆动力进行真实仿真,也可以对在道路上添加动态和静态障碍物进行仿真,能帮助高级别无人驾驶进行在线测试。
Momenta 核心技术的实现
具体介绍一下 Momenta 的环境感知能力,它对不同类型障碍物进行检测和识别。
道路上最常见的障碍物就是车辆,Momenta 现在可以识别多种车型,而且检测的不仅仅是外边框,还能通过一些方法去还原出车辆本身接近 3D 的姿态、轮胎位置等,有了这些信息,就能对障碍物的相对速度、离相机的位置进行一个比较好的估计,从而更好地判断车与周围其他车辆的相对关系。
除了车辆,人也是道路上非常常见的障碍物。环境感知能对人体的 17 个关节点进行追踪检测,识别每个路人的姿态和动作,例如识别人是在骑车还是走路,人如果走路的话,就要检测其是否走到车道等与车辆行驶相关的位置上了;人如果在骑车的话,就会检测其速度和 3D 姿态。
除了这些动态障碍物,静态障碍物对于车辆也非常重要,包括车道线、路口引导线、交通标识牌、红绿灯等。例如一些竖着的路灯杆,由于遮挡可能只被识别出一部分,但是环境感知算法会估计出它们的长度,并利用一些先验信息确定路灯杆的 3D 位置。另外,车道线也是非常有帮助的语义信息,在这些信息基础上,再加上交通牌等信息,它可以构建基于视觉的语义地图。
Momenta 也针对中国场景,对感知算法进行了优化,对有国内特色的车辆采集了一些数据,并对这些数据进行针对性的训练,以更好适应路况、道路上不同类型的障碍物等。
基于车道线、标识牌等信息,Momenta 可以构建一个高精度语义地图。为什么要构建一个高精度语义地图?相对于传统的地图而言,Momenta 高精度语义地图具有如下优势:
第一个是支持更快的更新。对于同类型道路,车辆只需要使用众包设备上的相机进行道路采集,就可以更新当前所面临的情况。另外,如果因为道路维修以及发生了一些变化情况,车辆也能通过摄像头采集相关信息,对其进行很好的维护;
第二个是高度压缩。高精度语义地图的空间存储占用非常小,此外,还具有更好的鲁棒性。一些比较底层的特征,势必由于受到光线、观测角度等因素,对 2D 特征的提取产生不利影响,而高精度语义地图就能减少这些因素的影响;
第三个是建图精度和定位精度,高精度语义地图从不同视角、不同时间、多摄像头采集到数据,能最大化地保证地图的精度,天时能实现定位精度误差小于 10 cm。
实现 L4 级别的自动驾驶需要怎样的技术与人才
目前 Momenta 累计完成融资超过 2 亿美金,估值超过 10 亿美金。Momenta 的技术领先性及产品落地能力除了为资本市场广泛认可外,也深受行业合作方的认可。
接下来针对想加入的小伙伴,介绍一下 Momenta 的成长空间。
Momenta 是一家非常开放、具有分享精神的公司,大家加入公司后都有机会参加国际顶级会议,聆听行业专家的分享。另外 Momenta 的培养机制也非常健全,包括:
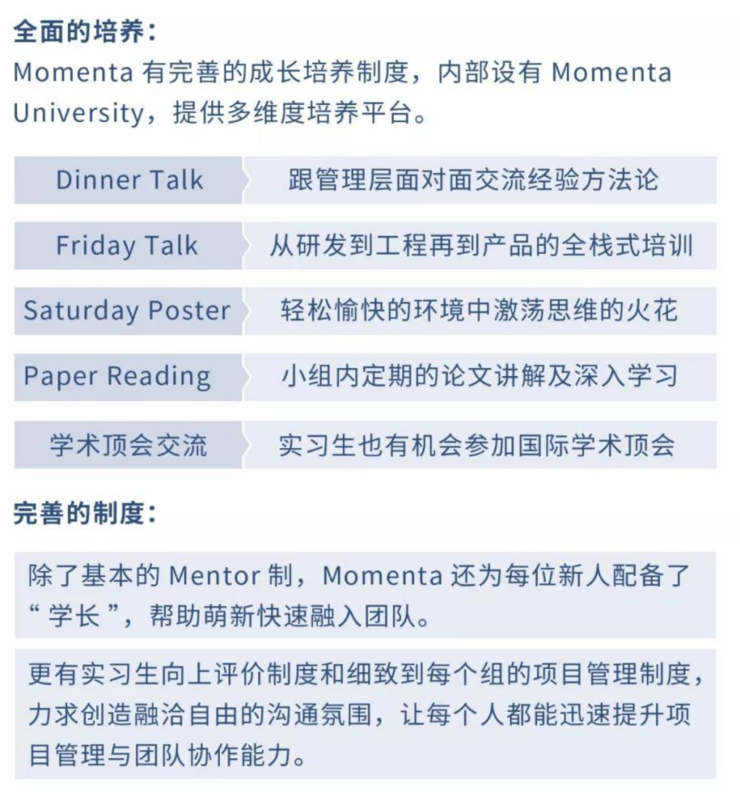
以下是 Momenta 的热招岗位,感兴趣的话可以直接扫描右下方二维码投递简历。
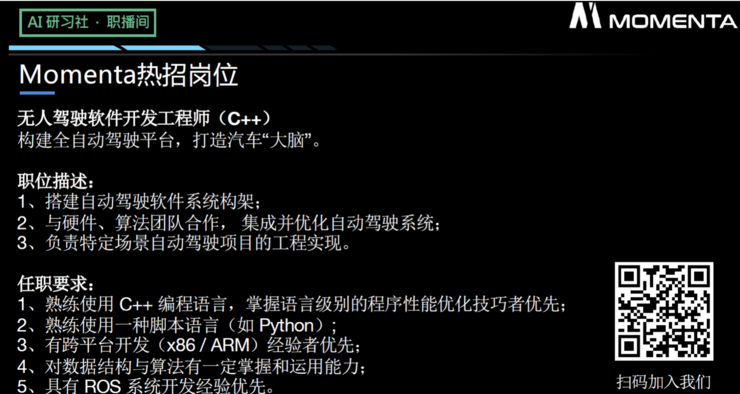
首先,Momenta 非常通用的岗位就是无人驾驶软件开发工程师(C++)。不同于一般的软件开发,无人驾驶系统方向的算法和软件开发对数据结构、算法优化能力的要求非常高,需求量非常大但是要求也非常高。不过这个岗位有很多机会接触到系统架构、算法优化的实践,而在这些项目中,大家都需要去跟同事进行深入的沟通和交流,才能将相关工作做得非常出色。
Planning 算法工程师也是需求量比较大的岗位,负责无人驾驶汽车的行为预测、路径的决策与规划,因此需要用到自动化和规划学习的一些方法。不同的优化和算法都有各自的优势和局限性,因此,这个岗位需要很好地去运用策略,使得驾驶系统对不同场景能进行更好地处理。
传感器融合与环境建模算法工程师,需要利用感知来构建精确的车辆周围动态和环境信息。该岗位需要对多相机、毫米波雷达、超声和激光物体检测的数据进行融合,以提高静态、动态障碍物位置、速度的估计精度,从而构建环境感知模型。
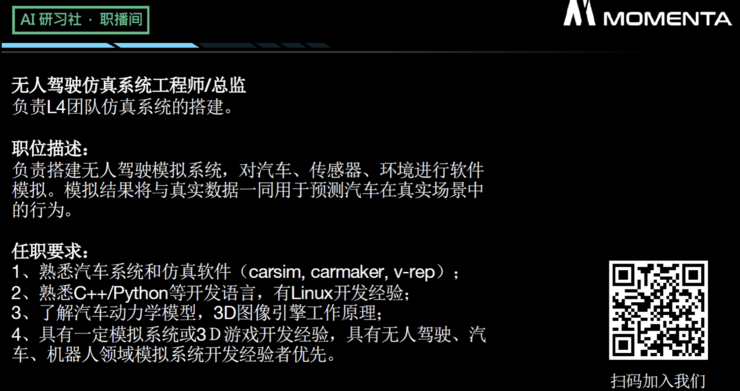
无人驾驶仿真系统工程师,这个岗位除了仿真器相关工作,还有很多数据方面的工作,另外还需要使无人驾驶系统在仿真器上更好地还原所看到的情景,对强化学习和机器学习方面的能力都有一些要求。这个岗位会与仿真开发的同事进行协作,一起去实现更真实的仿真系统开发。
除了研发相关的岗位,Momenta 还有一些测试岗位——无人驾驶测试工程师,我希望任职这一岗位的人有相应的背景知识,从而更好地了解无人驾驶产品怎样更好地进行系统层面的测试,分析不同的测试结构,并定位模块,更好地推动开发团队去改善相关问题。
欢迎大家加入 Momenta,一同在最好的时间,跟一群对的人,做一件对的事。
以上就是本期嘉宾的全部分享内容。更多公开课视频请到雷锋网AI研习社社区(https://club.leiphone.com/ )观看。关注微信公众号:AI 研习社(okweiwu),可获取最新公开课直播时间预告。
Momenta 陈凯:从人才角度看 L4 无人驾驶的实现 | AI 研习社职播间第 4 期(附 Momenta 招聘解读)...相关推荐
- 今日头条成功的核心技术秘诀是什么?深度解密个性化资讯推荐技术 本文作者:AI研习社 2017-07-05 12:24 导语:从“内行”的角度解密个性化资讯推荐技术。 雷锋网按:本文系知名 IT 技术资
今日头条成功的核心技术秘诀是什么?深度解密个性化资讯推荐技术 本文作者:AI研习社 2017-07-05 12:24 导语:从"内行"的角度解密个性化资讯推荐技术. 雷锋网按:本文 ...
- 从企业角度看人才培养与人才成长
从企业角度看人才培养与人才成长 今天听了一个讲座<从企业角度看人才培养与人才成长>,对于即将进入企业工作的我带来了一些新的知识和感悟.演讲者从当今时代特征.组织机构管理和企业人才成长规律三 ...
- 全权:从多旋翼角度看新时代下的航空人才需求
全权:从多旋翼角度看新时代下的航空人才需求 我要评论 2016年04月20日 16:41:15 来源: 新华网 评论0 打印 字大 字小 北京航空航天大学自动化科学与电气工程学院自控系副教授.可靠飞行 ...
- 从数据标注角度看自动驾驶,到底是谁在误导消费者?
写本文初衷主要是从自动驾驶数据原理的角度让作为普通消费的小伙伴们能理解自动驾驶目前的发展现状,并警示喜欢有自动驾驶功能汽车的小伙伴在实际生活中一定要慎重使用. 自动驾驶最近几年一直特别火,公交.大货. ...
- 一般向量空间的基变换_从希尔伯特空间的角度看线性变换的一般思想和问题
一般线性变换以及傅里叶变换,欧氏变换,仿射变换,余弦变换,小波变换,拉普拉斯变换,Z变换,希尔伯特变换等等这些所谓的变换太多了,这些到底搞得是什么?怎么像云像雾又像风呢?怎么才能彻底理解它们?它们究竟 ...
- 站在公司和员工的角度看实习员工
刚刚看了@nnnjquy的开始工作如何被重视?写出了一些实习生在刚实习的是应注意的一些事项,本人就联想到实习员工了,有感写一些感受吧. 员工和公司两者在合作的背后充满了很多的矛盾,员工已经做了 ...
- 公司技术管理角度看C++游戏程序员发展
公司技术管理角度看C++游戏程序员发展 H3D 这是我多年来招聘培训游戏程序员的一点想法.一直想汇总一下.主要目的是为了更好的对公司新进C++程序员进行培训,并且建立起游戏程序员培训,发展,成才,成为 ...
- 2021北大软微计算机考研感想——从另一角度看考研
2021北大软微考研感想--从另一角度看考研 其实这篇经验帖的主体内容是我在初试备考期间就已经写好了的,拟录取结果出来后做了一些必要的修改和整理,主要是纠结于什么该说.什么不该说,尽可能地消除一些主观 ...
- 万字长文干货,面试官角度看招聘
???? 这是第 53 篇不掺水的原创,想要了解更多,请戳上方蓝色字体:政采云前端团队 关注我们吧- 本文首发于政采云前端团队博客:万字长文干货,面试官角度看招聘 https://www.zoo.t ...
最新文章
- 论jquery与vuejs结合时的部分问题
- java ADT生成带签名的apk
- 反思走火入魔 急功近利:一步一步的做 一步一步的走 顺其自然 水到渠成
- storm 机器上日志查询_Storm原理与实践大数据技术栈14
- Openbiz Cubi 企业级应用程序开发(一)
- 行为模式之备忘录模式
- MySql-流程函数
- 使用库函数API和C代码中嵌入汇编代码两种方式使用同一个系统调用
- 福特新CEO“泼冷水”,给自动驾驶设立商业化节点是否真的有必要?
- 一般如何调试php程序吗,如何调试PHP程序
- 最适合程序员的电脑是什么?
- python爬虫心得_Python爬虫入门心得分享
- 安装包制作工具 SetupFactory 详解
- js怎么获取扫码枪条码_如何使用JavaScript获取扫码枪扫描得到的条形码
- JavaFX源码分析和实战之音频播放:MediaPlayer和AudioClip播放音频剪辑以及AudioClip与MediaPlayer的区别
- 最彻底的健身补剂——肌酸!
- 笔记本电脑运行特别慢怎么解决
- 为什么从此电脑访问不了ftp_巧用FTP来管理手机文件 从此摆脱USB
- 如何学习C4D?非常详细的C4D学习攻略!按照这个步骤你一定成为影视后期大神
- 元宇宙是什么,如何看待未来元宇宙的发展?