步进电机、伺服电机、舵机的原理和区别
步进电机、伺服电机、舵机的原理和区别@TOC
三者不是并列关系,因为步进电机和伺服电机是可以在功能上对比的;而舵机指的是伺服电机在航模、小型机器人等领域下常用的一个特殊版本,一般来说比较轻量、小型、简化和廉价,并附带减速机构。而步进电机和伺服电机本质上的最大区别在于,一个是开环控制,一个是闭环控制。步进电机接收的是电脉冲信号,根据信号数量转过相应的步距角。通俗来讲就是你推一下,我动一下。动的角度就是步距角,是步进电机的固有属性。假如步距角是15°,表示每接收一个脉冲电机就转过15°。所谓开环,就是只管控制,不管反馈。步进电机接收脉冲后转动,但不保证一定能转到。比如脉冲频率过高或者负载较大,就会造成失步,也就是没转到位。所以说使用步进电机的场合,要么不需要位置反馈,要么在其他设备上进行位置反馈。比如模型小车的车轮、光驱的光头、摄像机云台,以及各种行业机械设备等。
步进电机一般长这样:

内部结构则是这样:
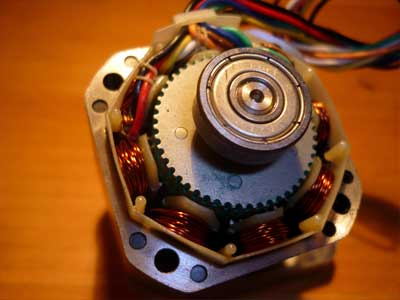
步进电机与普通直流交流电机的原理均不同,步进转动靠的是定子线圈绕组不同相位的电流以及定子和转子上齿槽产生的转矩。而伺服电机则是闭环控制,即通过传感器实时反馈电机的运行状态,由控制芯片进行实时调节。一般工业用的伺服电机都是三环控制,即电流环、速度环、位置环,分别能反馈电机运行的角加速度、角速度和旋转位置。芯片通过三者的反馈控制电机各相的驱动电流,实现电机的速度和位置都准确按照预定运行。伺服电机能保证只要负载在额定范围内,就能达到很高的精度,具体精度首先受制于编码器的码盘,与控制算法也有很大关系。与步进电机原理结构不同的是,伺服电机由于把控制电路放到了电机之外,里面的电机部分就是标准的直流电机或交流感应电机。一般情况下电机的原始扭矩是不够用的,往往需要配合减速机进行工作,可以使用减速齿轮组或行星减速器。伺服电机常用于需要高精度定位的领域,比如机床、工业机械臂、机器人等。常见的伺服电机长这样:(里面有三环控制电路)

内部结构是这样:(这款是空心杯无刷直流电机)
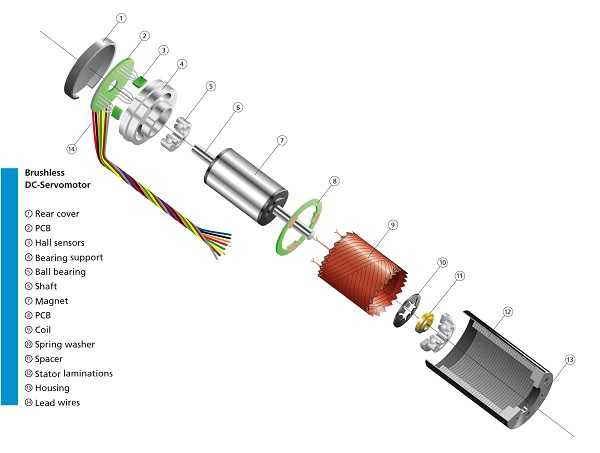
而舵机则是国人起的俗称,因为航模爱好者们最初用它控制船舵、飞机舵面而得名。伺服电机的英文是servomotor。舵机呢?有人也叫servomotor,有人简称为servo。大概就是「伺服电机」和「小伺伺」的关系吧。从结构来分析,舵机包括一个小型直流电机,加上传感器、控制芯片、减速齿轮组,装进一体化外壳。能够通过输入信号(一般是PWM信号,也有的是数字信号)控制旋转角度。由于是简化版,原本伺服电机的三环控制被简化成了一环,即只检测位置环。廉价的方案就是一个电位器,通过电阻来检测,高级的方案则会用到霍尔传感器,或者光栅编码器。给模型用的舵机很多干脆就是塑料外壳加塑料齿轮组。比如著名的廉价舵机SG90,俗称9g舵机(因为重量是9g):

稍一拆解就看到里面是这样的:
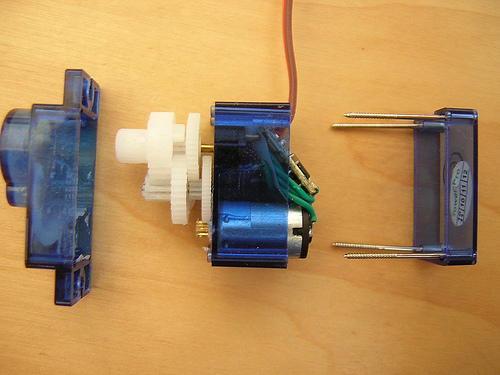
可以看到塑料齿轮组、电机、电位器、电路板等。
电机分类@TOC
![]()
![]()
![]()
![]()
步进电机、伺服电机、舵机的原理和区别相关推荐
- 直流电机 步进电机 伺服电机
...................................................................... ttl cmos rs232电平的区别 http://w ...
- 【伺服电机/舵机与Arduino使用教程】
伺服电机/舵机与Arduino使用教程 什么是伺服电机? 伺服电机的类型 模拟伺服电机 伺服系统如何工作? 连续旋转伺服电机 伺服电机控制信号 连续旋转伺服电机时序 速度 力矩 工作电压 伺服电机连接 ...
- 随机森林RF、XGBoost、GBDT和LightGBM的原理和区别
随机森林RF.XGBoost.GBDT和LightGBM的原理和区别 https://www.cnblogs.com/hugechuanqi/p/10554156.html
- 旋转校正原理_「牛车实验室」四轮定位和动平衡如何选择?趣谈两种项目的原理和区别...
[资讯-牛车网] 四轮定位和动平衡早已是大家耳熟能详的项目了,但在实际生活中我们发现,有的车主更换轮胎后去做了四轮定位,有的车主车轮被撞后去做了动平衡,整一个满拧,车子开起来反而不顺手了--那么今天, ...
- Mbox vs Maildir - 两者原理和区别
版权声明:可以任意转载,转载时请务必以超链接形式标明文章原始出处和作者信息及本声明. 本文网址:http://www.hzqbbc.com/blog/arch/2005/06/mbox_vs_mail ...
- Dos攻击与DDos攻击原理与区别,怎么防护?
Dos攻击与DDos攻击原理与区别,怎么防护? 1.原理: 1)DOS(Denial of Service)攻击,即拒绝服务,其主要危害是使计算机或网络无法提供正常的服务. 常见的DOS攻击手段有Te ...
- MG995舵机工作原理及基于STM32的驱动源代码
MG995舵机工作原理及基于STM32的驱动源代码 一·MG995舵机工作原理 1.MG995舵机简介 产品型号 MG995 产品尺寸 40.7*19.7*42.9mm 产品重量 55g 工作扭矩 1 ...
- 浅谈iOS和Android后台实时消息推送的原理和区别
http://www.52im.net/thread-286-1-1.html 前言 iOS和Android上的实时消息推送差异很大,往小了说是技术实现的差异,往大了说是系统实现理念的不同.实时消息推 ...
- 网桥和NAT原理和区别祥解
网桥和NAT原理和区别祥解 网络桥接: 真机上的网卡是一个真实的物理设备,真机与外界进行通信需要网卡这个设备,网卡是由内核进行控制的真机上的虚拟机也是一个真实的设备,但是这个虚拟机的网卡是虚拟的,它也 ...
- 图文并茂,讲解TCP和UDP协议的原理以及区别
TCP和UDP协议的区别以及原理 最近重新认知了一下TCP和UDP的原理以及区别,做一个简单的总结. 一.作用 首先,tcp和udp都是工作在传输层,用于程序之间传输数据的.数据一般包含:文件类型,视 ...
最新文章
- vscode断开调试服务器文件,vscode显示等待调试器断开连接
- Qt笔记-QSslSocket双向认证
- c语言写数码管,各位大神,如何用C语言实现在数码管上实现1234同时亮
- 利用Lucene.net搭建站内搜索(3)---创建索引
- 安装nokogiri前提
- Apollo开发平台授权管理的使用
- 360安卓_360手机助手安卓下载
- arduino人体红外传感器_Arduino 使用人体红外感应模块 HC-SR501
- Hexo博客主题安装及Next主题个性化修改
- 微软官网下载各版本VS的地址
- iOS历史回顾(iOS1~iOS8)
- 模拟django-simple-captcha实现中文验证码、数字及字母验证码、计算题验证码功能
- SQL UCASE() 函数
- 如何解决1万个并发连接,用每个客户一个线程的方法
- PPPoE拨号过程解析
- 操作系统---初学篇
- 网络总是迟到吗(把msn空间变成移动空间)
- pyinstaller打包torch运行后报错
- AutoCAD LISP绘制标准图框
- poi 5.2.2 操作word【目录】