信号与系统:第二章 线性时不变系统
原文链接:https://littlefish33.cn/SignalAndSystem/chapter2
- 第二章 线性时不变系统 Linear Time-invariant System
- 离散时间线性时不变系统:卷积和(Discrete-time LTI System: The Convolution Sum)
- 用脉冲表示的离散时间信号(The representation of discrete-time signals)
- 系统的离散信号的卷积和表示(The Convolution-Sum Representation of LTI System LTI)
- 连续时间线性时不变系统:卷积积分(Continuous-Time LTI System: The Convolution Integral)
- 用冲激表示的连续时间信号
- 连续时间线性时不变系统的单位冲激响应和卷积积分表示
- 卷积的计算
- 卷积的性质
- LTI 系统的性质
- 有记忆和无记忆(LTI System with and without Memory )
- 可逆性(Invertibility of LTI System )
- 因果性(Causality of LTI System)
- 稳定性(Stability for LTI System)
- 奇异函数(Singularity Function)
- 作为理想化短脉冲的单位冲激(The Unit Impulse as an Idealized Short Pulse)
- 通过卷积定义单位冲激(Define the Unit Impulse through Convolution)
- 单位冲激偶和其他奇异函数(Unit Doublets and Other Singularity Functions)
- 单位冲激积分(Derivatives of different orders of unit impulse)
- 用微分和差分方程描述的因果LTI系统(Causal LTI System described by Differential and different Equation)
- 线性常系数微分方程(Linear Constant-coefficient Differential Equation)
- 线性常系数差分方程(Linear Constant-coefficient Difference Equation)
- 用方框图表示一阶系统
- 离散时间线性时不变系统:卷积和(Discrete-time LTI System: The Convolution Sum)
第二章 线性时不变系统 Linear Time-invariant System
假设一个线性时不变系统:fi(t)→yi(t),i=1,2,...fi(t)→yi(t),i=1,2,...f_i(t) \to y_i(t) ,i = 1,2,...
假设有f(t)=∑ni=1aifi(t−ti)f(t)=∑i=1naifi(t−ti)f(t)=\sum_{i=1}^{n}a_if_i(t-t_i),因为线性时不变,故有响应y(t)=∑ni=1aiyi(t−ti)y(t)=∑i=1naiyi(t−ti)y(t) = \sum_{i=1}^na_iy_i(t-t_i)
离散时间线性时不变系统:卷积和(Discrete-time LTI System: The Convolution Sum)
用脉冲表示的离散时间信号(The representation of discrete-time signals)
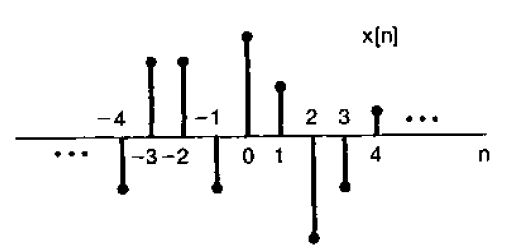
x[n] = ... + x[-1]\delta[n+1] + x[0]\delta[n] + x[1]\delta[n-1] + ...
x[n] = \sum_{k = -\infty}^{+\infty}x[k]\delta[n-k]
将离散时间信号当成一串单个脉冲,称为离散时间单位脉冲序列的筛选性质(sifting)
系统的离散信号的卷积和表示(The Convolution-Sum Representation of LTI System LTI)
\delta[n]\to h[n]
\delta[n-k]\to h[n-k](time\space invariance)
x[k]\delta[n-k] \to x[k]h[n-k](homogeneous)
\sum_{k=-\infty}^{+\infty}x[k]\delta[n-k]\to\sum_{k=-\infty}^{+\infty}x[k]h[n-k](additivity)
y[n] = \sum_{k=-\infty}^{+\infty}x[k]h[n-k] = x[n]\star h[n]
我们用x[n]⋆y[n]x[n]⋆y[n]x[n]\star y[n]表示∑+∞−∞x[k]h[n−k]∑−∞+∞x[k]h[n−k]\sum_{-\infty}^{+\infty}x[k]h[n-k],称为卷积和
系统在nnn时刻的输出包含所有时刻输入脉冲的影响,即对于输出y[n]" role="presentation">y[n]y[n]y[n],输出在n0n0n_0时刻的值y[n0]y[n0]y[n_0]包含所有时刻输入脉冲的影响:y[n0]=∑+∞k=−∞x[k]h[n0−k]y[n0]=∑k=−∞+∞x[k]h[n0−k]y[n_0]=\sum_{k=-\infty}^{+\infty}x[k]h[n_0-k]
h[n]h[n]h[n]也被称为系统的零状态响应
卷积和的计算:
- 利用定义:
eg:
x[n]=αn⋅u[n],h[n]=u[n]x[n]=αn⋅u[n],h[n]=u[n]x[n] = \alpha^n \cdot u[n], h[n] = u[n],求x[n]⋆h[n]x[n]⋆h[n]x[n]\star h[n]
x[n]⋆h[n]=∑+∞k=−∞x[k]h[n−k]x[n]⋆h[n]=∑k=−∞+∞x[k]h[n−k]x[n]\star h[n] = \sum_{k=-\infty}^{+\infty}x[k]h[n-k]
=∑+∞k=0αku[k]u[n−k]=∑k=0+∞αku[k]u[n−k]\space \space \space \space \space \space \space \space \space \space \space \space \space \space \space \space \space \space =\sum_{k=0}^{+\infty}\alpha^ku[k]u[n-k]
=∑nk=0αk,(n≥0)=∑k=0nαk,(n≥0)\space \space \space \space \space \space \space \space \space \space \space \space \space \space \space \space \space \space =\sum_{k=0}^{n}\alpha^k, (n\ge 0)
图解法
(1)反折:h[n]⇒h[k]→h[−k]h[n]⇒h[k]→h[−k]h[n]\Rightarrow h[k] \to h[-k]
(2)平移:⇒h[n−k]⇒h[n−k]\Rightarrow h[n-k](n大于0是右移,n小于0是左移)
(3)x[k]h[n−k]x[k]h[n−k]x[k]h[n-k]对于每一个不同的n求积
(4)对于每一个n求和:x[n]⋆h[n]=∑+∞k=−∞x[k]h[n−k]x[n]⋆h[n]=∑k=−∞+∞x[k]h[n−k]x[n]\star h[n] = \sum_{k=-\infty}^{+\infty}x[k]h[n-k]
连续时间线性时不变系统:卷积积分(Continuous-Time LTI System: The Convolution Integral)
用冲激表示的连续时间信号
\delta(t) = \lim_{\Delta \to 0}\delta_{\Delta}(t)
\hat{x}(t) = \sum_{k=-\infty}^{+\infty}x(k\Delta) \delta_{\Delta}(t-k\Delta)\cdot \Delta
x(t) = \lim_{\Delta \to 0}\hat{x}(t)
x(t)=\int_{-\infty}^{+\infty}x(\tau)\delta(t-\tau)d\tau\space\space\space\space(*)
(∗)(∗)(*)即为连续时间信号的冲激表现形式
下面通过上面的冲激表现形式来得出连续时间信号通过LTI系统的响应
连续时间线性时不变系统的单位冲激响应和卷积积分表示
\delta_{\Delta}(t) \to h_{\Delta}(t)
\delta_{\Delta}(t-k\Delta) \to h_{\Delta}(t-k\Delta)(time\space invariance)
x(k\Delta)\delta_{\Delta}(t-k\Delta) \to x(k\Delta)h_{\Delta}(t-k\Delta)(homogeneous)
\sum_{k=-\infty}^{+\infty}x(k\Delta)\delta_{\Delta}(t-k\Delta)\cdot\Delta \to \sum_{k=-\infty}^{+\infty}x(k\Delta)h_{\Delta}(t-k\Delta)\cdot\Delta(additivity)
y(t)=\int_{-\infty}^{+\infty}x(\tau)h(t-\tau)d\tau= x(t)\star h(t)
同理,反映的是所有时刻作用于系统的冲激在ttt时刻产生响应的加权积分,加权因子由输入信号x(τ)" role="presentation">x(τ)x(τ)x(\tau)控制
所以,若一个LTI系统有δ(t)→h(t)δ(t)→h(t)\delta(t)\to h(t),故对于一个x(t)x(t)x(t)的输入,输出y(t)=x(t)⋆h(t)y(t)=x(t)⋆h(t)y(t)=x(t)\star h(t),我们称它为卷积积分(The Convolution Integral)
卷积的计算
(以后也可以通过傅里叶变换,拉普拉斯变换求卷积积分)
- 利用定义:
eg:
x(t)=e−at⋅u(t),a>0,h(t)=u(t)x(t)=e−at⋅u(t),a>0,h(t)=u(t)x(t) = e^{-at}\cdot u(t), a > 0, h(t) = u(t),试求h(t)⋆x(t)h(t)⋆x(t)h(t)\star x(t)
h(t)⋆x(t)=∫+∞−∞e−aτ⋅u(τ)⋅u(t−tau)dτ={∫t0e−aτdτ0t≥0t<0h(t)⋆x(t)=∫−∞+∞e−aτ⋅u(τ)⋅u(t−tau)dτ={∫0te−aτdτt≥00t<0h(t)\star x(t) = \int_{-\infty}^{+\infty}e^{-a\tau}\cdot u(\tau)\cdot u(t-tau)d\tau=\begin{cases} \int_{0} ^{t}e^{-a\tau}d\tau&t \ge 0 \\ 0 & t
即:h(t)⋆x(t)=1a(1−e−at)u(t)h(t)⋆x(t)=1a(1−e−at)u(t)h(t)\star x(t) = \frac{1}{a}(1-e^{-at})u(t)
- 图解法:
卷积的性质
- The Commutative Property 交换律
x(t)\star h(t) = h(t) \star x(t)
x[n]\star h[n] = h[n] \star x[n]
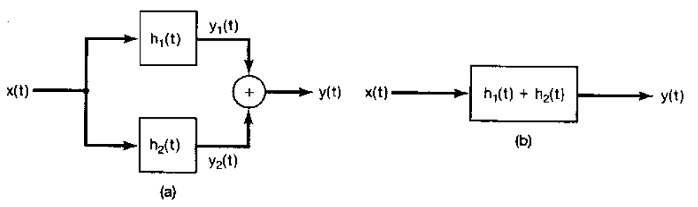
- The distributive Property 分配率
x(t)\star \{h_1(t) + h_2(t)\}= x(t)\star h_1(t) +x(t)\star h_2(t)
x[n]\star \{h_1[n] + h_2[n]\}= x[n]\star h_1[n] +x[n]\star h_2[n]
- The Associative Property 结合律
x(t)\star \{h_1(t) \star h_2(t)\}= \{x(t) \star h_1(t)\} \star h_2(t)
x[n]\star \{h_1[n] \star h_2[n]\}= \{x[n] \star h_1[n]\} \star h_2[n]
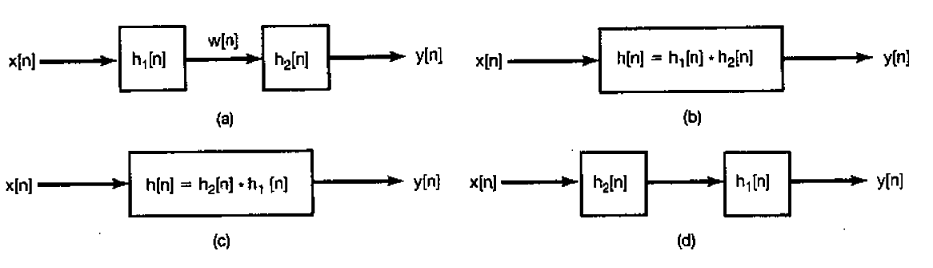
这里的(a)(b)(c)(d)是等价的
含有冲激的卷积(△△\triangle)
x(t)⋆δ(t)=x(t)x(t)⋆δ(t)=x(t)x(t)\star \delta(t) = x(t)
x[n]⋆δ[n]=x[n]x[n]⋆δ[n]=x[n]x[n]\star \delta[n] = x[n]
x(t)⋆δ(t−t0)=x(t−t0)x(t)⋆δ(t−t0)=x(t−t0)x(t)\star \delta(t-t_0) = x(t-t_0)
x[n]⋆δ[n−n0]=x[n−n0]x[n]⋆δ[n−n0]=x[n−n0]x[n]\star \delta[n-n_0] = x[n-n_0]
若y(t)=x(t)⋆h(t)y(t)=x(t)⋆h(t)y(t) = x(t) \star h(t),则x(t−t1)⋆h(t−t2)=y(t−t1−t2)x(t−t1)⋆h(t−t2)=y(t−t1−t2)x(t-t_1) \star h(t-t_2) = y(t-t_1-t_2)
由此可见,将某些信号变成冲激的形式,可以极大的化简卷积的计算过程,通过微分使如方波,线性函数变成冲激形式
卷积的微分、积分性质
微分:y(t)=x(t)⋆h′(t)=x′(t)⋆h(t)y(t)=x(t)⋆h′(t)=x′(t)⋆h(t)y(t) = x(t) \star h'(t) = x'(t) \star h(t)
积分:y(−1)(t)=x(t)⋆h(−1)(t)=x(−1)(t)⋆h(t)y(−1)(t)=x(t)⋆h(−1)(t)=x(−1)(t)⋆h(t)y^{(-1)}(t) = x(t) \star h^{(-1)}(t) = x^{(-1)}(t) \star h(t)
推广:yn(t)=x(t)⋆hn(t)=xn(t)⋆h(t)yn(t)=x(t)⋆hn(t)=xn(t)⋆h(t)y^{n}(t) = x(t) \star h^{n}(t) = x^{n}(t) \star h(t)
ym+n(t)=xm(t)⋆hn(t)=xm(t)⋆hn(t)ym+n(t)=xm(t)⋆hn(t)=xm(t)⋆hn(t)y^{m+n}(t) = x^m(t) \star h^{n}(t) = x^{m}(t) \star h^n(t)
LTI 系统的性质

有记忆和无记忆(LTI System with and without Memory )
y[n]=x[n]⋆h[n]=∑+∞k=−∞x[k]h[n−k]y[n]=x[n]⋆h[n]=∑k=−∞+∞x[k]h[n−k]y[n] = x[n] \star h[n] = \sum_{k=-\infty}^{+\infty}x[k]h[n-k]
无记忆:h[n−k]=0,k≠n⇒h[n]=0,n≠0h[n−k]=0,k≠n⇒h[n]=0,n≠0h[n-k] = 0, k \ne n \Rightarrow h[n] = 0, n \ne 0
y(t)=x(t)⋆h(t)=∫+∞−∞x(τ)h(t−τ)dτy(t)=x(t)⋆h(t)=∫−∞+∞x(τ)h(t−τ)dτy(t) = x(t) \star h(t) = \int_{-\infty}^{+\infty} x(\tau)h(t-\tau)d\tau
无记忆:h(t−τ)=0,τ≠t⇒h(t)=0,t≠0h(t−τ)=0,τ≠t⇒h(t)=0,t≠0h(t-\tau) = 0, \tau \ne t \Rightarrow h(t) = 0, t \ne 0
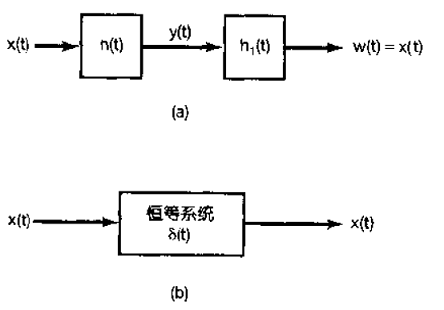
可逆性(Invertibility of LTI System )
因果性(Causality of LTI System)
- 离散时间系统
y[n] = \sum_{k=-\infty}^{+\infty}x[k]h[n-k] = \sum_{k=-\infty}^{n}x[k]h[n-k] + \sum_{k=n+1}^{+\infty}x[k]h[n-k]
当k>nk>nk > n时,h[n−k]=0⇒h[n]=0,n<0h[n−k]=0⇒h[n]=0,n<0h[n-k] = 0 \Rightarrow h[n] =0, n
即如果时间信号n<0n<0n 时,h[n]=0h[n]=0h[n] =0,故为因果系统
对离散时间的因果系统来讲,它的单位脉冲响应必然是因果的
- 同理,对连续时间系统有:h(t)=0,t<0h(t)=0,t<0h(t) = 0, t
稳定性(Stability for LTI System)
- 离散时间系统
|x[n]|
|y[n]| = |\sum_{k=-\infty}^{+\infty}x[n-k]h[k]| \le \sum_{k=-\infty}^{+\infty}|x[n-k]|\cdot |h[k]| \le M \cdot \sum_{k=-\infty}^{+\infty}|h[k]|
即如果一个系统是有界的,那么用于描述这个系统的单位脉冲的响应的累计有界,即:
\sum_{k=-\infty}^{+\infty}|h[k]|
- 同理,对连续时间系统有:∫+∞−∞|h(t)|<∞∫−∞+∞|h(t)|<∞\int_{-\infty}^{+\infty}|h(t)|
奇异函数(Singularity Function)
作为理想化短脉冲的单位冲激(The Unit Impulse as an Idealized Short Pulse)
δ(t)=limΔ→0δΔ(t)δ(t)=limΔ→0δΔ(t)\delta(t) = \lim_{\Delta\to 0}\delta_{\Delta}(t)
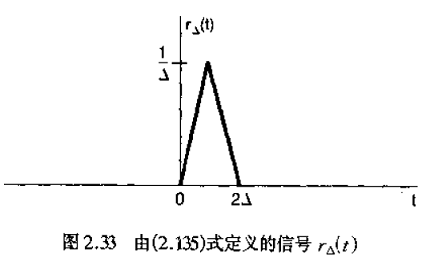
δ(t)=limΔ→0rΔ(t)δ(t)=limΔ→0rΔ(t)\delta(t) = \lim_{\Delta\to 0}r_{\Delta}(t)
δ(t)=limΔ→0rΔ(t)⋆δΔ(t)δ(t)=limΔ→0rΔ(t)⋆δΔ(t)\delta(t) = \lim_{\Delta\to 0}r_{\Delta}(t) \star \delta_{\Delta}(t)
δ(t)=limΔ→0rΔ(t)⋆rΔ(t)δ(t)=limΔ→0rΔ(t)⋆rΔ(t)\delta(t) = \lim_{\Delta\to 0}r_{\Delta}(t) \star r_{\Delta}(t)
这些都可以用来表示单位冲激信号,只要持续时间宽度足够短,在这个意义来讲完全等价
通过卷积定义单位冲激(Define the Unit Impulse through Convolution)
若对于∀x(t)∀x(t)\forall x(t),都有x(t)⋆φ(t)=x(t)x(t)⋆φ(t)=x(t)x(t) \star \varphi (t) = x(t),则φ(t)=δ(t)φ(t)=δ(t)\varphi (t) = \delta(t),δ(t)δ(t)\delta(t)为单位冲激信号
通过筛选性质定义:
对于任意x(t)x(t)x(t),x(t)x(t)x(t)在t=0t=0t = 0时是连续的,若∫+∞−∞x(t)⋅φ(t)dt=x(t)⇒φ(t)=δ(t)∫−∞+∞x(t)⋅φ(t)dt=x(t)⇒φ(t)=δ(t)\int_{-\infty}^{+\infty}x(t)\cdot \varphi(t)dt = x(t) \Rightarrow \varphi(t) = \delta(t),δ(t)δ(t)\delta(t)为单位冲激信号
单位冲激偶和其他奇异函数(Unit Doublets and Other Singularity Functions)
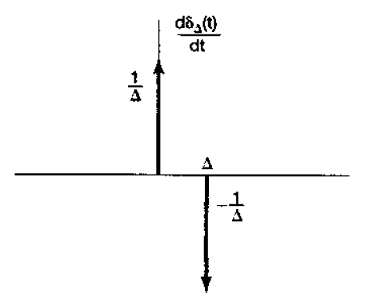
单位冲激偶:u1(t)=dδ(t)dtu1(t)=dδ(t)dtu_1(t) = \frac{d\delta(t)}{dt},可以看做是一个信号在同一时刻两个相反的两个冲激,面积为0;也可以看成一个微分器的单位冲激响应
k阶冲激偶:uk(t)=dkδ(t)dtkuk(t)=dkδ(t)dtku_k(t) = \frac{d^k\delta(t)}{dt^k}
∫+∞−∞φ(t)u1(t)dt=−φ′(0)∫−∞+∞φ(t)u1(t)dt=−φ′(0)\int_{-\infty}^{+\infty}\varphi (t) u_1(t) dt = -\varphi'(0)
∫+∞−∞φ(t)uk(t)dt=(−1)kdkφ(t)dtk|t=0∫−∞+∞φ(t)uk(t)dt=(−1)kdkφ(t)dtk|t=0\int_{-\infty}^{+\infty}\varphi (t) u_k(t) dt = (-1)^k\frac{d^k\varphi(t)}{dt^k}|_{t = 0}
冲激偶的性质:
- ∫+∞−∞u1(t)dt=0∫−∞+∞u1(t)dt=0\int_{-\infty}^{+\infty} u_1 (t)dt = 0
- u1(−t)=−u1(t)u1(−t)=−u1(t)u_1(-t) = -u_1(t),k为奇数,为奇函数;k为偶数,为偶函数
- φ(t)u1(t)=φ(0)u1(t)−φ′(0)δ(t)φ(t)u1(t)=φ(0)u1(t)−φ′(0)δ(t)\varphi (t) u_1(t) = \varphi (0) u_1(t) - \varphi' (0) \delta(t)
单位冲激积分(Derivatives of different orders of unit impulse)
u_{-k}(t) = u_{-1}(t)\star u_{-1}(t) \cdot \cdot \cdot u_{-1}(t)
u−2(t)=u−1(t)⋆u−1(t)=∫t−∞u(τ)dτ=tu(t)u−2(t)=u−1(t)⋆u−1(t)=∫−∞tu(τ)dτ=tu(t)u_{-2}(t) = u_{-1}(t)\star u_{-1}(t) = \int_{-\infty}^{t}u(\tau)d\tau = tu(t),被称为单位斜波函数(unit ramp functions)
用微分和差分方程描述的因果LTI系统(Causal LTI System described by Differential and different Equation)
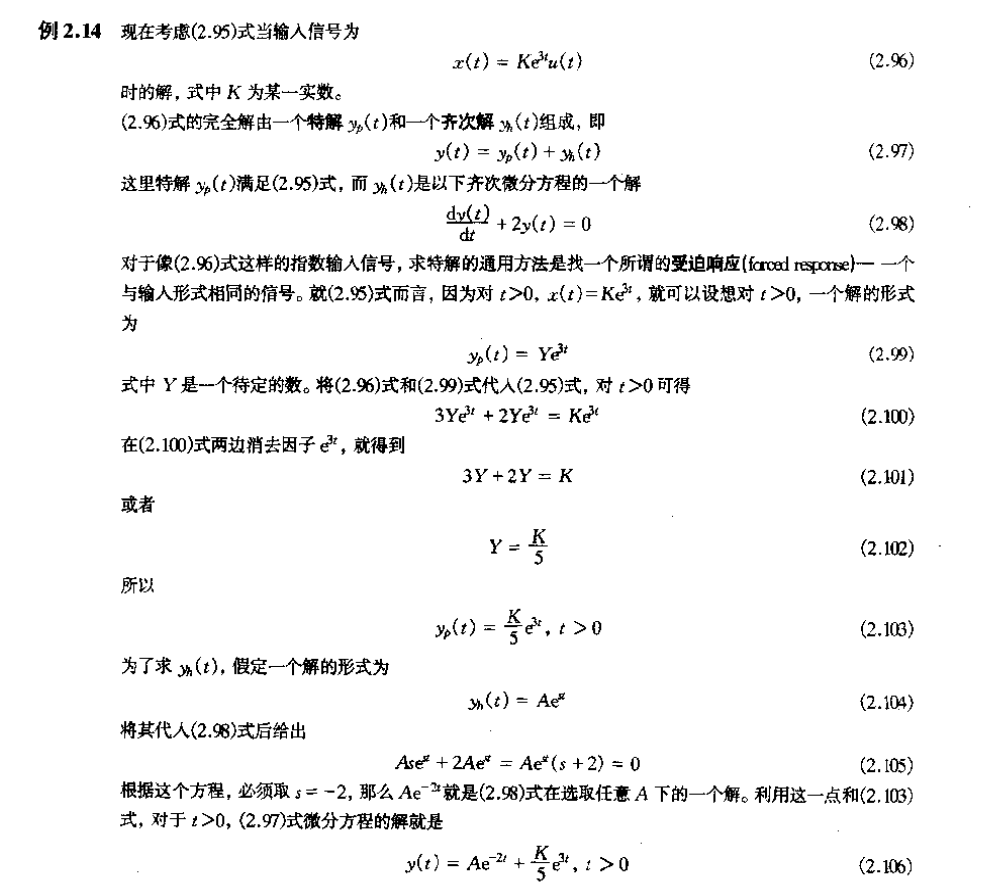
线性常系数微分方程(Linear Constant-coefficient Differential Equation)
∑Nk=0akdky(t)dtk=∑Mk=0bkdkx(t)dtk∑k=0Nakdky(t)dtk=∑k=0Mbkdkx(t)dtk\sum_{k=0}^{N}a_k\frac{d^ky(t)}{dt^k} = \sum_{k=0}^{M}b_k\frac{d^kx(t)}{dt^k}
y(t)=yx(t)+yf(t)y(t)=yx(t)+yf(t)y(t) = y_x(t) + y_f(t)
yx(t)yx(t)y_x(t) 零输入响应,yf(t)yf(t)y_f(t) 零状态响应
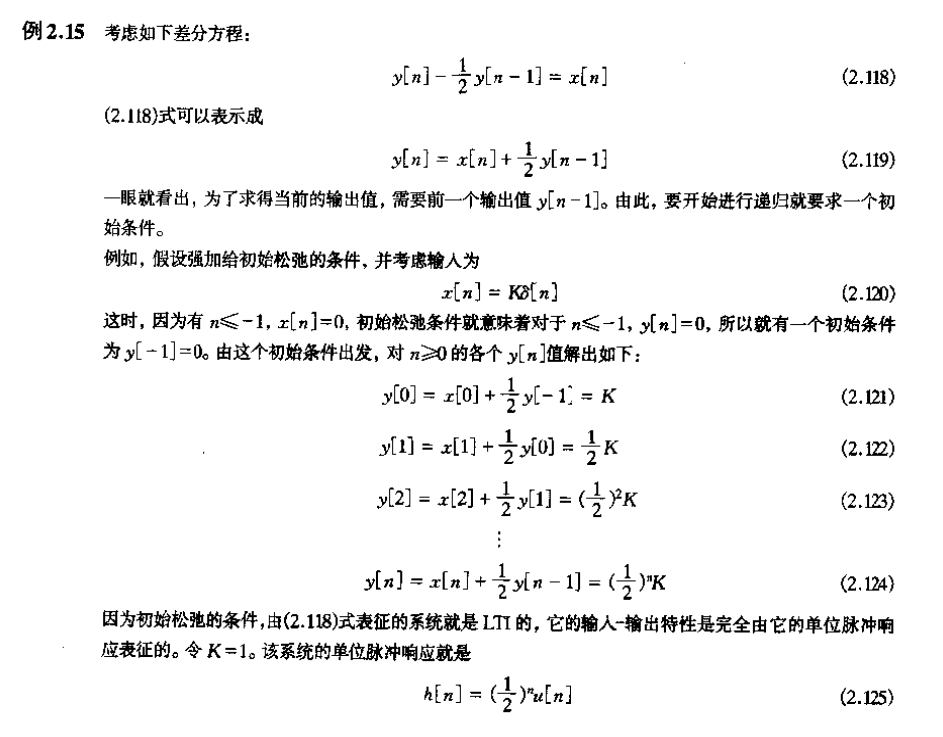
线性常系数差分方程(Linear Constant-coefficient Difference Equation)
∑Nk=0aky[n−k]=∑Mk=0bkx[n−k]∑k=0Naky[n−k]=∑k=0Mbkx[n−k]\sum_{k=0}^{N}a_k y[n-k] = \sum_{k=0}^{M}b_k x[n-k]
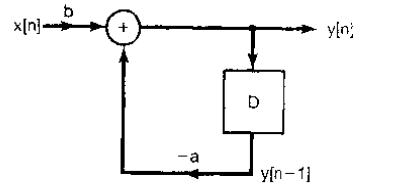
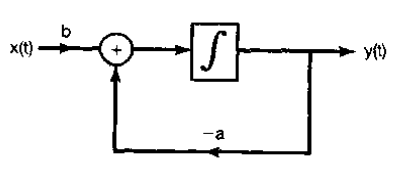
用方框图表示一阶系统
- 对于离散时间系统:
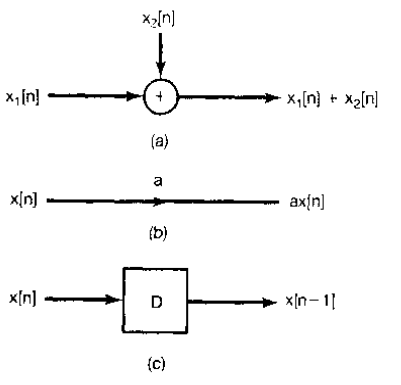
eg:y[n]+ay[n−1]=b[n]y[n]+ay[n−1]=b[n]y[n] + ay[n-1] = b[n]
- 对于连续时间信号:
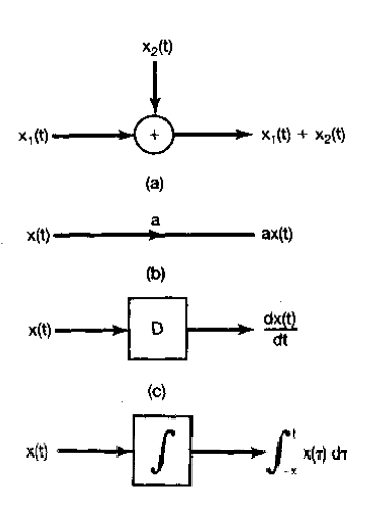
eg:对于dy(t)dt=bx(t)−ay(t)dy(t)dt=bx(t)−ay(t)\frac{dy(t)}{dt} = bx(t) - ay(t)
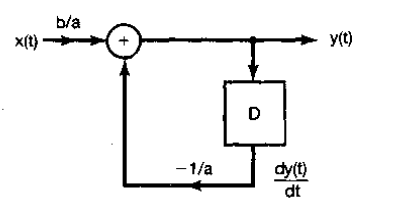
然而因为微分器实现困难,而且对于噪声和误差极为灵敏,因此我们常常将上式改写为:y(t)=∫t−∞[bx(t)−ay(t)]dty(t)=∫−∞t[bx(t)−ay(t)]dty(t) = \int_{-\infty}^{t}[bx(t) - ay(t)]dt
信号与系统:第二章 线性时不变系统相关推荐
- 【信号与系统】01 - 线性时不变系统
1. 信号与系统 1.1 序言 实话说,我之前对信号系统一窍不通,但因为工作需要不得不学习它的基础知识.快餐式的学习又不是我的性格,于是就上手了奥本海姆的两本大部头经典,经过一番死磕,总算是把基本内容 ...
- 信号与系统 第二章 卷积总结 δ函数
- 2021年春季学期-信号与系统-第二次作业参考答案-第九小题
本文是 2021年春季学期-信号与系统-第二次作业参考答案 的参考答案. ▌第九题 9. 已知三个系统的输入输出关系分别为: 把上述三个子系统进行如下的级联,求系统的输入输出关系,它是线性.时不变系统 ...
- 2021年春季学期-信号与系统-第二次作业参考答案-第五小题
本文是 2021年春季学期-信号与系统-第二次作业参考答案 的参考答案. ▌第五题 5. Consider a LTI systems whose response to the singal x1( ...
- 2021年春季学期-信号与系统-第二次作业参考答案
※ 每道题目参考答案见每道题目后面连接 ■ 相关文献链接: 2021年春季学期-信号与系统-第二次作业参考答案-第一小题 2021年春季学期-信号与系统-第二次作业参考答案-第二小题 2021年春季学 ...
- 2021年春季学期-信号与系统-第二次作业参考答案-第六小题
本文是 2021年春季学期-信号与系统-第二次作业参考答案 的参考答案. ▌第六题 6. 有一线性时不变系统, 当激励e1(t)=u(t)e_1 \left( t \right) = u\left( ...
- 2021年春季学期-信号与系统-第二次作业参考答案-第八小题
本文是 2021年春季学期-信号与系统-第二次作业参考答案 的参考答案. ▌第八题 8. 判断下列系统是否为线性.时不变.因果? (1)第一小题 r(t)=ddte(t)r\left( t \righ ...
- 数据结构第二章-线性表(详细知识点总结)
目录 第二章 线性表 2.1 线性表的定义和操作 2.1.1 线性表的定义 2.1.2 线性表的基本操作 2.2线性表的顺序表示 2.2.1 顺序表的定义 2.2.2 顺序表上基本操作的实现 2.3 ...
- C语言数据结构-第二章线性表-电大
第二章线性表--内容简介 本章将进入线性结构的学习. 线性结构是最简单.最常用的一种数据结构. 本章将学习线性表的定义.顺序和链式两种存储方式及相应存储结构上的运算实现.通过典型示例训练,掌握线性表的 ...
最新文章
- SQL索引学习-聚集索引
- jquery 数组的调用
- Mirantis 收购 Docker EE | 云原生生态周报 Vol. 28
- UNIX再学习 -- TCP/UDP 客户机/服务器
- Spring IoC 容器
- 原始套接字抓取所有以太网数据包与分析
- 好看的导航网站源码-简约自适应网站网址导航系统
- 我见过不少赚了钱,投资孵化一堆店铺的,一般而言后续发展都会出问题的
- combobox总结
- 读书笔记——第八周学习笔记
- vue轮播插件vue-awesome-swiper
- jquery图片延迟加载 及 serializeArray、serialize用法记录
- 新版盲盒交友小程序源码下载
- Gantt - attachEvent所有事件(归类、索引)
- java 检测usb_如何从android中检测和打印USB打印机
- 骰子游戏实验报告C语言,掷骰子游戏电路的设计与实现实验报告
- 快速上手Onvif(Python)心得
- Android调用手机自带图库选择图片
- 操作系统--多线程进阶(上)
- C语言——指针详细讲解