PP-YOLOE实现自动驾驶场景检测
PP-YOLOE实现自动驾驶场景检测
一、项目简介
项目背景:
该项目着眼于基于视觉深度学习的自动驾驶场景,旨在对车载摄像头采集的视频数据进行道路场景解析,为自动驾驶提供一种解决思路。
项目意义:
首先,在行车检测方面,现有检测模型可以实现多种类型的车辆检测,然而,一方面,检测模型在速度和精度上存在矛盾,对于精度较高的模型,如两阶段检测网络Faster R-CNN,其FPS较低,无法满足实时检测,因此其商用价值受到很大限制。另一方面,对于道路场景的目标检测,许多数据集会对场景中很多类型的目标进行标注,然而,经过我们的实践和观察,使用这种数据集训练模型并不能带来很好的效果。由于目标类别本身存在多样性,例如各式各样的货车,电瓶车,亦或是各式各样的路标和交通灯等,这会对模型的学习造成混淆,最终导致模型在现实场景中对很多目标造成误判,极大的影响模型在现实中的应用。为解决这两个问题,我们在本项目中使用飞桨开源的高精度实时检测器PP-YOLOE作为检测模型,在检测速度和检测精度上实现了较好的权衡。
二、数据集介绍
数据集地址:BDD100K 自动驾驶数据集
视频数据: 超过1,100小时的100000个高清视频序列在一天中许多不同的时间,天气条件,和驾驶场景驾驶经验。视频序列还包括GPS位置、IMU数据和时间戳。
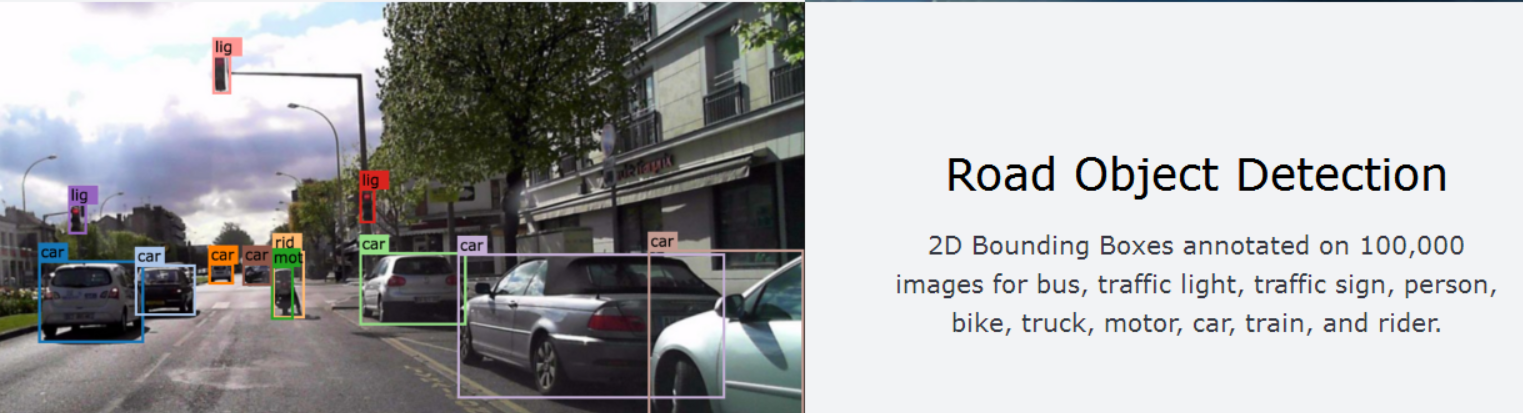
道路目标检测:2D边框框注释了100,000张图片,用于公交、交通灯、交通标志、人、自行车、卡车、摩托车、小汽车、火车和骑手。
实例分割:超过10,000张具有像素级和丰富实例级注释的不同图像。
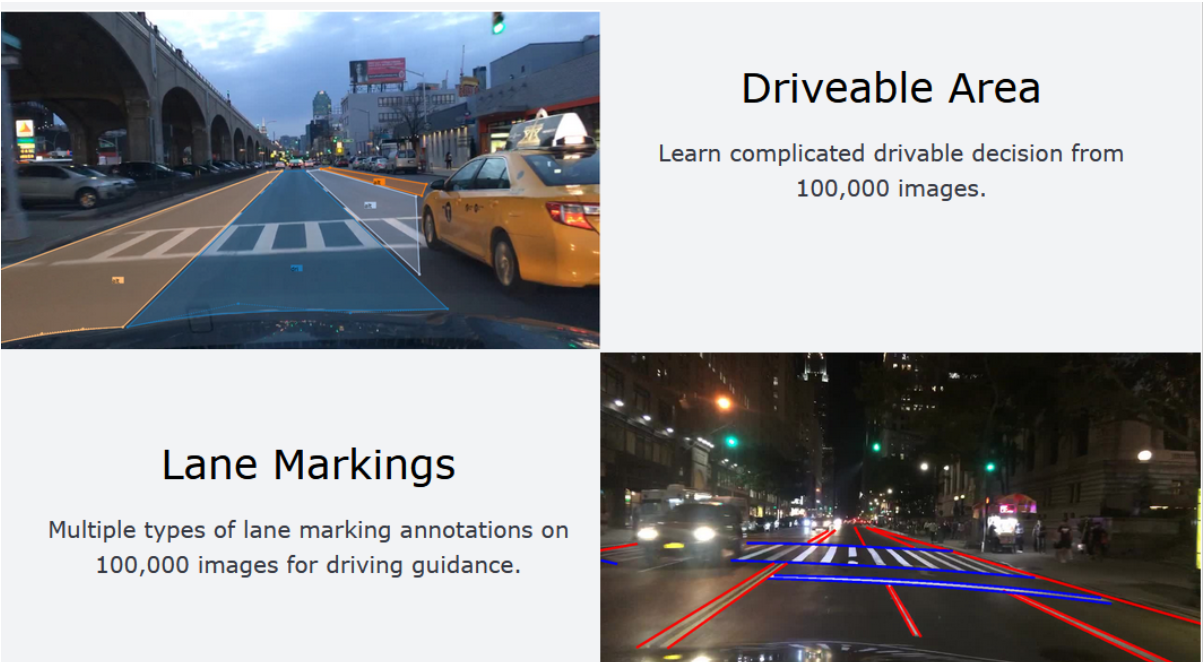
引擎区域:从10万张图片中学习复杂的可驾驶决策。
车道标记:10万张图片上多类型的车道标注,用于引导驾驶。
三、技术路线
1、PaddleDetection简介:
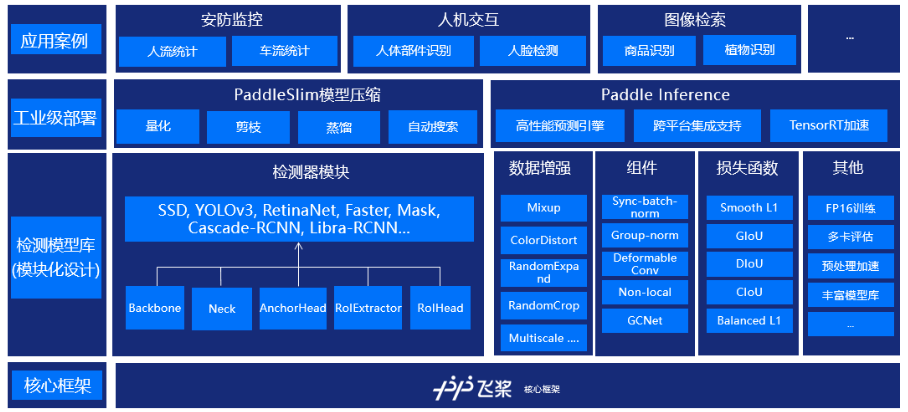
PaddleDetection是飞桨推出的端到端目标检测开发套件,旨在帮助开发者更快更好地完成检测模型的训练、精度速度优化到部署全流程。PaddleDetection以模块化的设计实现了多种主流目标检测算法,并且提供了丰富的数据增强、网络组件、损失函数等模块,集成了模型压缩和跨平台高性能部署能力。目前基于PaddleDetection已经完成落地的项目涉及工业质检、遥感图像检测、无人巡检等多个领域。
PaddleDetection模块式地提供YOLOv3,EfficientDet等10余种目标检测算法、ResNet-vd,MobileNetV3等10余种backbone,以及sync batch norm, IoU Loss、可变性卷积等多个扩展模块,这些模块可以定制化地自由组合,灵活配置;同时预置提供100余种训练好的检测模型。
在YOLOv3系列模型上,通过一键式剪裁+蒸馏的方案,YOLOv3_MobileNetV1剪裁了近70%的计算量,在精度基本无损或略有提升的情况,模型在高通855芯片上加速2.3倍,GPU上也有60%的加速;YOLOv3-ResNet50vd-DCN剪裁模型,精度提升了0.6,GPU上加速20%。同时,对应压缩后的模型、压缩脚本和操作方法均可以在Github上获取。
2、模型库链接:
PaddleDetection代码GitHub链接:https://github.com/PaddlePaddle/PaddleDetection
PaddleDetection代码Gitee链接:https://gitee.com/paddlepaddle/PaddleDetection
PaddleDetection文档链接:https://paddledetection.readthedocs.io/
# 克隆paddledetection仓库
# gitee 国内下载比较快
!git clone https://gitee.com/paddlepaddle/PaddleDetection.git
# 导入package
!pip install -r ~/PaddleDetection/requirements.txt
# 继续安装依赖库
!python3 ~/PaddleDetection/setup.py install
四、PP-YOLOE
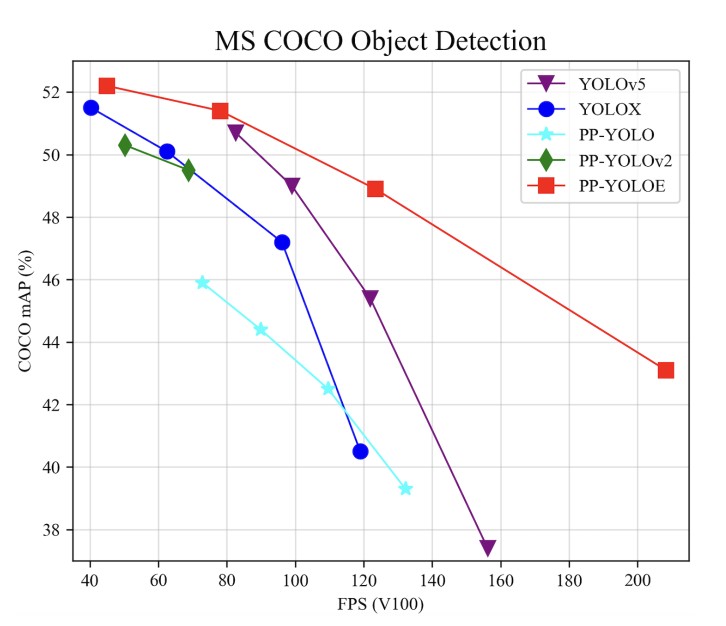
PP-YOLOE是基于PP-YOLOv2的卓越的单阶段Anchor-free模型,超越了多种流行的YOLO模型。PP-YOLOE有一系列的模型,即s/m/l/x,可以通过width multiplier和depth multiplier配置。PP-YOLOE避免了使用诸如Deformable Convolution或者Matrix NMS之类的特殊算子,以使其能轻松地部署在多种多样的硬件上。更多细节可以参考我们的report。
- PP-YOLOE基于PP-YOLOv2进行改进,PP-YOLOv2是anchor-based的方法,resnet50vd作为backbone,neck是PAN,加入SPP layer和DropBlock,head是lightweight IoU aware head,在此基础上,PP-YOLOE按照FCOS的方法设计为anchor-free,但是正样本的匹配是将距离GT中心最近的Anchor point作为正样本。
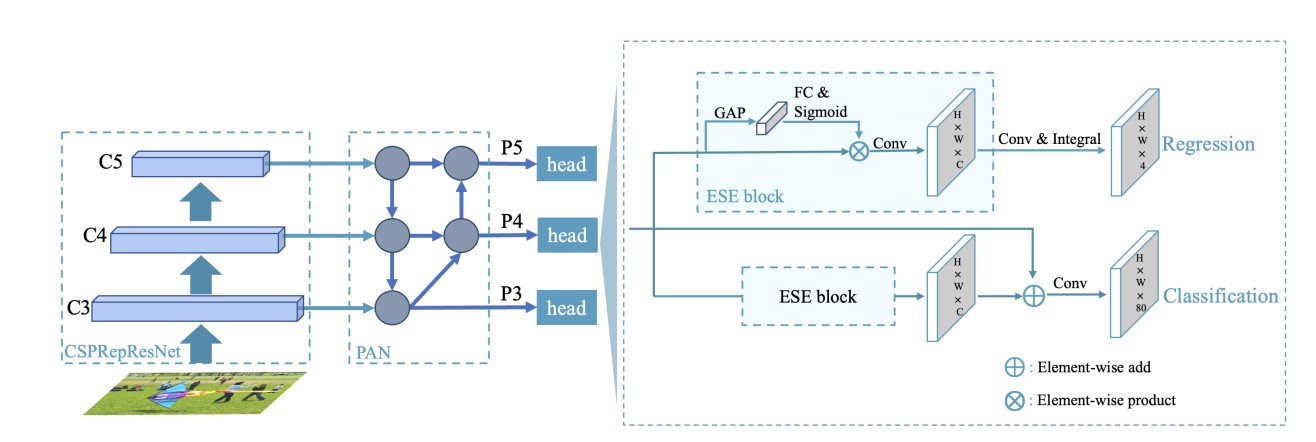
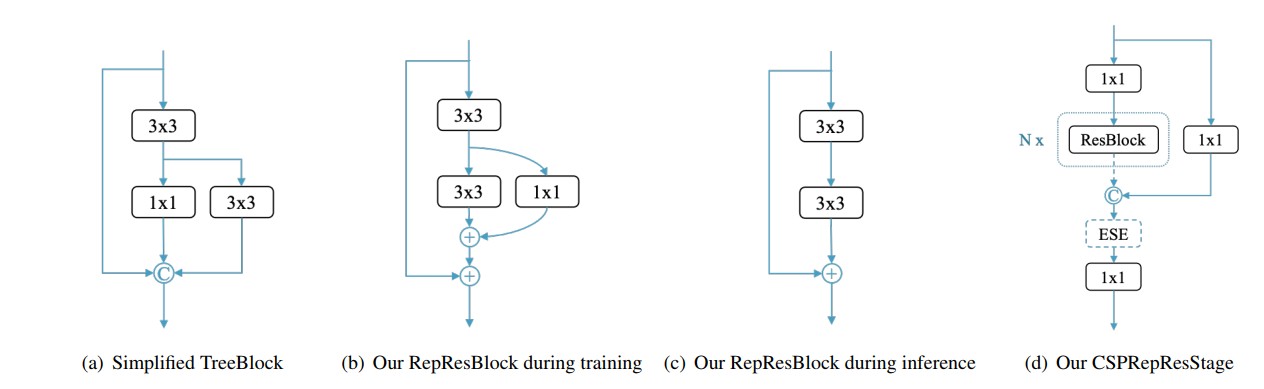
- 设计了一个新的基本块叫做RepResBlock,结合了残差连接和密集连接,由该模块构成的backbone成为CSPRepResNet。在这个backbone中首先是三个卷积层的stem,然后是四个串行的CSPRepResStage,在每一个stage还加入了通道注意力模块ESE,在backbone设计中还将concat替换为element-wise add。推理的时候需要重参数化。
- neck使用RepResBlock作为基本块,但是不包括shortcut和ESE。
- 样本匹配策略TAL:包括动态样本匹配和任务对齐损失。
- Efficient Task-aligned Head (ET-head):使用ESE模块替换TOOD模型中的layer attention,将分类分支的对齐简化,将回归分支替换为DFL loss。
- 分类Loss使用VFL ,回归loss使用DFL,并且均采取IOU-aware。
PP-YOLOE由以下方法组成
- 可扩展的backbone和neck
- Task Alignment Learning
- Efficient Task-aligned head with DFL和VFL
- SiLU(Swish)激活函数
五、数据准备
# 解压数据集
# !mkdir /home/aistudio/PaddleDetection/dataset/
!unzip -oq /home/aistudio/data/data124804/bdd100k_det_20_labels_trainval.zip -d /home/aistudio/PaddleDetection/dataset/
!unzip -oq /home/aistudio/data/data124805/bdd100k_images_100k.zip -d /home/aistudio/PaddleDetection/dataset/
# json文件转换为xml格式
import json
import os
from xml.dom.minidom import parse
from xml.dom import minidom# categorys = ['car', 'bus', 'person', 'bike', 'truck', 'motor', 'train', 'rider', 'traffic sign', 'traffic light']
categorys = set()def paraseJson(File):file = open(File)f = json.load(file)objects = fobjs = []print("picture num: ", len(objects))for i in objects:if(i.get('labels') == None):continueobj_label = []for j in i['labels']:obj = []obj.append(int(j['box2d']['x1']))obj.append(int(j['box2d']['y1']))obj.append(int(j['box2d']['x2']))obj.append(int(j['box2d']['y2']))obj.append(j['category'])categorys.add(j['category'])obj_label.append(obj)tmp = []tmp.append(i['name'])tmp.append(obj_label)objs.append(tmp)return objsdef save_xml(objs, dstDir):for i in objs:name = ' 'num = 0dom = minidom.Document()annotate_node = dom.createElement("annotation")for j in i:if num == 0:name = jnum += 1name_node = dom.createElement("filename")name_node.appendChild(dom.createTextNode(str(name)))annotate_node.appendChild(name_node)size_node = dom.createElement("size")width_node = dom.createElement("width")width_node.appendChild(dom.createTextNode(str(1280)))size_node.appendChild(width_node)height_node = dom.createElement("height")height_node.appendChild(dom.createTextNode(str(720)))size_node.appendChild(height_node)depth_node = dom.createElement("depth")depth_node.appendChild(dom.createTextNode(str(3)))size_node.appendChild(depth_node)annotate_node.appendChild(size_node)continuefor t in j:object = dom.createElement("object")name_label_node = dom.createElement("name")name_label_node.appendChild(dom.createTextNode(str(t[4])))object.appendChild(name_label_node)bndbox_node = dom.createElement("bndbox")xmin_node = dom.createElement("xmin")xmin_node.appendChild(dom.createTextNode(str(t[0])))ymin_node = dom.createElement("ymin")ymin_node.appendChild(dom.createTextNode(str(t[1])))xmax_node = dom.createElement("xmax")xmax_node.appendChild(dom.createTextNode(str(t[2])))ymax_node = dom.createElement("ymax")ymax_node.appendChild(dom.createTextNode(str(t[3])))bndbox_node.appendChild(xmin_node)bndbox_node.appendChild(ymin_node)bndbox_node.appendChild(xmax_node)bndbox_node.appendChild(ymax_node)object.appendChild(bndbox_node)annotate_node.appendChild(object)dom.appendChild(annotate_node)with open(dstDir + '{}.xml'.format(name[:-4]), 'w') as f:dom.writexml(f, addindent=' ', encoding='utf-8')def main(srcDir, dstDir):for dirpath, dirnames, filenames in os.walk(srcDir):for filepath in filenames:fileName = os.path.join(dirpath, filepath)print("processing: {}".format(fileName))objs = paraseJson(str(fileName))print('has label: ', len(objs))if 'train' in fileName:dst = os.path.join(dstDir, 'train/')else:dst = os.path.join(dstDir, 'val/')if not os.path.exists(dst):os.makedirs(dst)save_xml(objs, dst)os.chdir('/home/aistudio/PaddleDetection/dataset/bdd100k')
srcDir = './labels/det_20'
dstDir = 'labels_xml/'
main(srcDir, dstDir)with open('labels.txt', 'w') as f:for label in categorys:f.write(label + '\n')processing: ./labels/det_20/det_val.json
picture num: 10000
has label: 10000
processing: ./labels/det_20/det_train.json
picture num: 69863
has label: 69853
# 生成train_list.txt和val_list.txt
import os
os.chdir('/home/aistudio/PaddleDetection/dataset/bdd100k/')
base_dir = 'images/100k/'
label_dir = 'labels_xml/'
# with open('train_list.txt', 'w') as train:
# for filename in os.listdir(label_dir + 'train'):
# train.write(base_dir + 'train/' + filename.split('.')[0] + '.jpg' + " " + label_dir + 'train/' + filename + '\n')with open('val_list.txt', 'w') as val:for filename in os.listdir(label_dir + 'val'):val.write(base_dir + 'val/' + filename.split('.')[0] + '.jpg' + " " + label_dir + 'val/' + filename + '\n')
# 查看数据集数量
import os
os.chdir('/home/aistudio/PaddleDetection/dataset/bdd100k/')
base_dir = 'images/100k/'
imgs = os.listdir(base_dir + 'train')
print('训练集图片总量: {}'.format(len(imgs)))imgs = os.listdir(base_dir + 'val')
print('验证集图片总量: {}'.format(len(imgs)))
训练集图片总量: 70000
验证集图片总量: 10000
六、数据预处理
TrainReader:sample_transforms:- Decode: {}- RandomDistort: {}- RandomExpand: {fill_value: [123.675, 116.28, 103.53]}- RandomCrop: {}- RandomFlip: {}batch_transforms:- BatchRandomResize: {target_size: [320, 352, 384, 416, 448, 480, 512, 544, 576, 608, 640, 672, 704, 736, 768], random_size: True, random_interp: True, keep_ratio: False}- NormalizeImage: {mean: [0.485, 0.456, 0.406], std: [0.229, 0.224, 0.225], is_scale: True}- Permute: {}- PadGT: {}batch_size: 20shuffle: truedrop_last: trueuse_shared_memory: truecollate_batch: true
- RandomCrop:随机裁剪图像。
- RandomFlip:实现图像的随机翻转(翻转概率为0.5)。
- RandomDistort:以一定的概率对图像进行随机像素内容变换,可包括亮度、对比度、饱和度、色相角度、通道顺序的调整,模型训练时的数据增强操作。
- BatchRandomResize:对一个批次中的图片随机指定尺寸,范围是[576, 608, 640, 672, 704],插值方式为随机插值,进行多尺度训练。
- Normalize:图像归一化,均值默认为[0.485, 0.456, 0.406]。长度应与图像通道数量相同。标准差默认为[0.229, 0.224, 0.225]。长度应与图像通道数量相同。
七、模型训练
本项目使用的配置文件是~/PaddleDetection/configs/ppyoloe/ppyoloe_crn_m_300e_coco.yml
包含的配置文件如下:
_BASE_: ['../datasets/voc.yml','../runtime.yml','./_base_/optimizer_300e.yml','./_base_/ppyoloe_crn.yml','./_base_/ppyoloe_reader.yml',
]
- 训练阶段采用的学习率衰减策略为余弦衰减,最大迭代轮次为300。
# 开启训练
%cd ~/PaddleDetection
!python3 tools/train.py -c configs/ppyoloe/ppyoloe_crn_m_300e_coco.yml -r output/ppyoloe_crn_m_300e_coco/50.pdparams --eval
八、模型评估
# 评估 默认使用训练过程中保存的best_model
# -c 参数表示指定使用哪个配置文件
# -o 参数表示指定配置文件中的全局变量(覆盖配置文件中的设置),需使用单卡评估
%cd ~/PaddleDetection
!python tools/eval.py -c configs/ppyoloe/ppyoloe_crn_m_300e_coco.yml
/home/aistudio/PaddleDetection
Warning: import ppdet from source directory without installing, run 'python setup.py install' to install ppdet firstly
W0921 13:56:33.244480 707 gpu_resources.cc:61] Please NOTE: device: 0, GPU Compute Capability: 7.0, Driver API Version: 11.2, Runtime API Version: 11.2
W0921 13:56:33.248515 707 gpu_resources.cc:91] device: 0, cuDNN Version: 8.2.
[09/21 13:56:39] ppdet.utils.checkpoint INFO: Finish loading model weights: output/ppyoloe_crn_m_300e_coco/best_model.pdparams
[09/21 13:56:43] ppdet.engine INFO: Eval iter: 0
[09/21 13:57:32] ppdet.engine INFO: Eval iter: 100
[09/21 13:58:21] ppdet.engine INFO: Eval iter: 200
[09/21 13:59:10] ppdet.engine INFO: Eval iter: 300
[09/21 14:00:00] ppdet.engine INFO: Eval iter: 400
[09/21 14:00:48] ppdet.engine INFO: Eval iter: 500
[09/21 14:01:38] ppdet.engine INFO: Eval iter: 600
[09/21 14:02:27] ppdet.engine INFO: Eval iter: 700
[09/21 14:03:17] ppdet.engine INFO: Eval iter: 800
[09/21 14:04:06] ppdet.engine INFO: Eval iter: 900
[09/21 14:04:55] ppdet.engine INFO: Eval iter: 1000
[09/21 14:05:45] ppdet.engine INFO: Eval iter: 1100
[09/21 14:06:34] ppdet.engine INFO: Eval iter: 1200
[09/21 14:06:57] ppdet.metrics.metrics INFO: Accumulating evaluatation results...
[09/21 14:07:09] ppdet.metrics.metrics INFO: mAP(0.50, 11point) = 39.83%
[09/21 14:07:09] ppdet.engine INFO: Total sample number: 10000, averge FPS: 16.188732445157605
九、模型测试
# 首先生成测试集
# 随机采样
import shutil
import os
import numpy as np
os.chdir('/home/aistudio/PaddleDetection')
data_dir = "dataset/bdd100k/images/100k/test/"
pathlist= os.listdir(data_dir)
t = np.random.choice(pathlist, size=200, replace=False)
dst_dir = "dataset/static_test/"
if not os.path.exists(dst_dir):os.mkdir(dst_dir)for path in t:src = data_dir + pathdst = dst_dir + pathshutil.copy(src, dst)
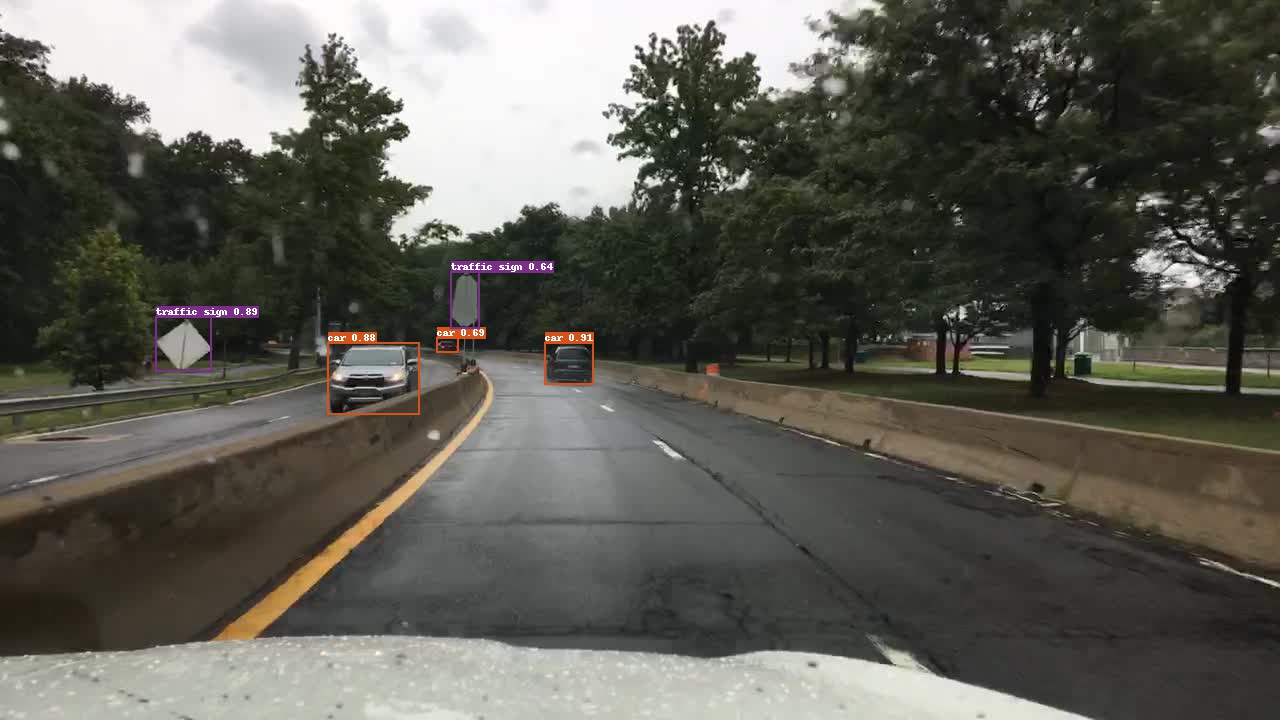
动态图测试
%cd ~/PaddleDetection
!python tools/infer.py -c configs/ppyoloe/ppyoloe_crn_m_300e_coco.yml \--infer_dir=dataset/static_test \--output_dir=dataset/result \-o use_gpu=true \-o weights=output/ppyoloe_crn_m_300e_coco/best_model.pdparams
测试效果可视化

静态图测试
# 将训练好的模型导出为静态图
%cd ~/PaddleDetection
!python tools/export_model.py -c configs/ppyoloe/ppyoloe_crn_m_300e_coco.yml \-o weights=output/ppyoloe_crn_m_300e_coco/best_model.pdparams \--output_dir=inference/
/home/aistudio/PaddleDetection
Warning: import ppdet from source directory without installing, run 'python setup.py install' to install ppdet firstly
[09/21 14:17:35] ppdet.utils.checkpoint INFO: Finish loading model weights: output/ppyoloe_crn_m_300e_coco/best_model.pdparams
[09/21 14:17:36] ppdet.engine INFO: Export inference config file to inference/ppyoloe_crn_m_300e_coco/infer_cfg.yml
[09/21 14:17:41] ppdet.engine INFO: Export model and saved in inference/ppyoloe_crn_m_300e_coco
导出文件结构如下
inference/ppyoloe_crn_m_300e_coco|--infer_cfg.yml|--model.pdmodel|--model.pdiparams|--model.pdiparams.info
PP-YOLOE静态图性能测试
在这里,随机从20000张测试集中选择200张图片进行性能测试,测试环境包括以下三种配置:
- CPU+4 Thread
- CPU+MKL+4 Thread
- GPU
# CPU测试推理模型(不开启mkldnn加速)
!python deploy/python/infer.py --model_dir=inference/ppyoloe_crn_m_300e_coco \--image_dir dataset/static_test \--output_dir dataset/static_result \--device=CPU --batch_size=1 \--cpu_threads=4
# CPU测试推理模型(开启mkldnn加速)
!python deploy/python/infer.py --model_dir=inference/ppyoloe_crn_m_300e_coco \--image_dir dataset/static_test \--output_dir dataset/static_result \--device=CPU --batch_size=1 \--cpu_threads=4 \--enable_mkldnn=True
# GPU测试推理模型
!python deploy/python/infer.py --model_dir=inference/ppyoloe_crn_m_300e_coco \--image_dir dataset/static_test \--output_dir dataset/static_result \--device=GPU --batch_size=1
测试结果
| ppyoloe_crn_m_coco | preprocess_time(ms) | inference_time(ms) | postprocess_time(ms) | average latency time(ms) |
|---|---|---|---|---|
| CPU | 71.80 | 1688.20 | 0.10 | 1760.10 |
| CPU+MKL | 66.50 | 683.60 | 0.10 | 750.11 |
| GPU | 27.70 | 52.20 | 0.00 | 79.96 |
可以看到,ppyoloe_crn_m_coco在开了MKL加速后推理速度快了约57%,而GPU模式下相比于MKL加速的CPU模式推理速度快了约89%。由此,在硬件只提供CPU的情况下,开启MKL加速可以大大提高推理速度,如果提供GPU,那么将会使得推理速度进一步大幅提升。
另外,开启MKL加速对前处理和后处理影响不大,然而,开启GPU加速则对前后处理和模型推理都有较大的提升。
项目总结
利用PP-YOLOE在大规模车辆数据集BDD100k上进行了50个epoch的预训练,并分进行了动态图和静态图的测试。
手动处理数据集,本次总共包含了自动驾驶场景中的13个常见类别,并提供了VOC格式的数据集。
项目作者
个人介绍:赵祎安 大连理工大学 计算机专业大三 大工飞桨领航团团长
请点击此处查看本环境基本用法.
Please click here for more detailed instructions.
此文章为搬运
原项目链接
PP-YOLOE实现自动驾驶场景检测相关推荐
- 自动驾驶场景要求(速度方面和检测速度方面)
自动驾驶场景要求(速度方面和检测速度方面) 汽车从运动到静止状态需要一个制动距离,为了安全起见,根据国际标准中制动距离的要求,一辆满载的小车在正常泊油路上以30K m/h的速度行驶,制动距离不得大于9 ...
- 自动驾驶场景解析:图像分割开发实战
企业管理者说, 我想尝试在业务场景中应用AI,但没有资深算法工程师,怎么办? 业务场景复杂,数据积累不足.质量参差不齐,如何快速优化? 各大厂商的AI芯片和硬件层出不穷,性能.功耗.价格,我该如何选择 ...
- 使用 YOLOv5 训练自动驾驶目标检测网络
本文会详细介绍YOLO V5的网络结构及组成模块,并使用YOLO V5s在BDD100K自动驾驶数据集上进行迁移学习,搭建属于自己的自动驾驶交通物体对象识别网络. 本文来源:知乎-自动驾驶全栈工程师 ...
- 使用yolov5训练自动驾驶目标检测数据集BDD100K
文章目录 一.什么是BDD100K 二.数据预处理 三.环境配置 四.修改模型结构 五.迁移学习 六.训练BDD100K 七.评估性能 八.结语 一.什么是BDD100K BDD100K是伯克利发布的 ...
- ARGO数据集—自动驾驶场景(版本:Argoverse 1.1)
前言 ARGO是一个自动驾驶场景的数据集,它有竞赛排行(立体深度估计.运动预测.3D检测.3D跟踪等等),截止2021.12最新版本是Argoverse 1.1:Argoverse1.1 通过1000 ...
- [自动驾驶-目标检测] C++ PCL 连通域点云聚类
文章目录 引言 标签连通域聚类原理 Octree + LCC 代码实现 Octree + LCC 测试结果 Octree + LCC 的优缺点 改进思路 参考文献 引言 在实际实现3D目标检测时,在不 ...
- [自动驾驶-目标检测] C++ PCL 障碍物检测
文章目录 1 文章引言 2 难点分析 3 初期思路 4 初期展示(Kitti数据集) 5 初步方案 5.1 栅格化 5.2 地面分割 5.2 点云聚类 6 参考文献 1 文章引言 由于时间原因,3D检 ...
- 基于改进Deeplabv3plus的自动驾驶场景分割系统 (源码&教程)
1.研究背景 随着人工智能技术的飞速发展,车辆的自动驾驶离人们的生活越来越近.自动驾驶整个运行流程中首先需要依赖各种车载传感器收集车辆周围的各种环境数据,进而利用各种分析算法分析得到计算机可感知的环境 ...
- CV Code | 本周新出计算机视觉开源代码汇总(含自动驾驶目标检测、医学图像分割、风格迁移、语义分割、目标跟踪等)...
点击我爱计算机视觉标星,更快获取CVML新技术 刚刚过去的一周含五一假期,工作日第一天,CV君汇总了过去一周计算机视觉领域新出的开源代码,涉及到自动驾驶目标检测.医学图像分割.风格迁移.神经架构搜索. ...
最新文章
- 查缺补漏 | Python自定义函数
- 旷视科技 Face++ 全资收购艾瑞思机器人 正式进军机器人业务
- android c# websocket
- 分享:一个简单的线程池的实现
- 21.C 语言与 C++在内存分配有什么区别?
- linux远程连接硬件加速,linux – 没有X的硬件加速
- Android 常见错误
- NetJavaScriptFlex
- 95-40-105-java.util.concurrent-线程-Executor
- Java面向对象----抽象类
- paip.c++ qt messagebox用法
- paip.程序模块间的通讯方式大总结
- 华旭 身份证读卡器测试软件_华旭HX-FDX3S读卡器驱动+身份证验证软件
- window.dialogArguments只兼容ie的问题解决
- matlab 计算图像峰值信噪比,Matlab评价图像质量,峰值信噪比,模糊系数的计算 | 学步园...
- 购买JSP空间上当的其他网友登载的地址
- Uri.parse()的各种用法
- String类型的测量长度
- 国内快速下载 CentOS 镜像源
- 建站选择免费虚拟主机的六大误区