VPP:Bihash简介
Bihash(Bounded-index extensible hash),个人认为其特点可大致概括如下:
1、bihash支持8/16/24/40/48等类型,减少对于_mm_crc32_u32/16等的使用,提高效率的同时,避免引入GCC的bug;
2、bihash使用64bit Hash值,最多可以支持双层hash查找,第一层bucket查找,第二层page查找(后面具体分析其hash结构);
3、bucket大小和page大小均为2的指数倍,因此hash查找时,仅需要位与操作即可;
4、采用working_copy,bucket操作区变换前后添加内存屏障,实现线程安全,使得bihash的查找无锁,修改时仍可进行查找;
5、采用freelists减少heap的碎片化,同时提高分配效率;
6、采用cache_lru的方式,提高查找效率。
Bihash的hash值计算
Bihash计算hash值时,对key进行hash。采用clib_crc32c或者clib_xxhash算法进行计算,x86中默认为clib_crc32c。key长度为8的倍数,即为了尽量使用_mm_crc32_u64函数,避免进一步使用_mm_crc32_u32等,出现GCC bug,同时加快了计算效率。得到的hash值为64bit,其结构如下:
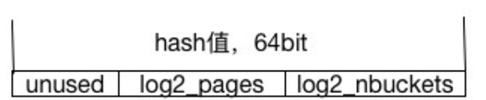
后log2_nbuckets位用于表示所落buckets的index,中间log2_pages表示具体page的index,即bucket、page的双层hash。注意,当page级出现hash冲突的时候,该层可能被拉成线形。
Bihash数据结构简介
这里主要介绍三个数据结构,BVT (clib_bihash_value), BVT (clib_bihash_bucket),以及BVT (clib_bihash)。其中BVT是个宏,用于将其转换为对应的bihash类型,如_8_8,_16_8,其中第一个数字表示key的长度,第二个数字表示value的长度,单位字节,所以BVT (clib_bihash_value)阅读时可直接将其当作clib_bihash_value_8_8。
BVT (clib_bihash_value) 为存放若干kvp的数据结构,vpp中将其记作page,默认情况每个page中存放BIHASH_KVP_PER_PAGE(默认为4)个kvp。具体数据结构如下:
typedef struct BV (clib_bihash_value)
{ // bucket位置决定是kvp(*buckets)或者next_free(**free_list)union{// 真正存放的kvpBVT (clib_bihash_kv) kvp[BIHASH_KVP_PER_PAGE];// 当该bucket被free后,通过next_free将释放的内存空间串联起来struct BV (clib_bihash_value) * next_free;};
} BVT (clib_bihash_value);//kvp的结构体
typedef struct
{u64 key; /**< the key */u64 value; /**< the value */
} clib_bihash_kv_8_8_t;
BVT (clib_bihash_bucket)为bucket的数据结构,记录该bucket的详细信息。具体数据结构如下:
typedef struct
{union{struct{ // 距离整个bihash内存头部的偏移值u32 offset;// bihash内是否是page是否是hash的u8 linear_search;// 该bucket中page数目(log2后的)u8 log2_pages;// bucket内kvp的数目,当为0是进行freei16 refcnt;};u64 as_u64;};// bucket的cache,用于提高查找效率,仅对频繁查找相同内容的才有较好效果==
#if BIHASH_KVP_CACHE_SIZE > 0u16 cache_lru;BVT (clib_bihash_kv) cache[BIHASH_KVP_CACHE_SIZE];
#endif
} BVT (clib_bihash_bucket);
BVT (clib_bihash)是bihash的数据结构,记录整个bihash表的全部信息,其具体数据结构如下:
typedef struct
{ // 这个目测是没有用到==, 如错,请指正^^BVT (clib_bihash_value) * values;// buckets指针BVT (clib_bihash_bucket) * buckets;// 修改时加锁volatile u32 *writer_lock;// 拷贝区,当进行修改操作时,相应bucket内数据会拷贝到working_copies中BVT (clib_bihash_value) ** working_copies;int *working_copy_lengths;// 用于记录正在修改的bucket位置BVT (clib_bihash_bucket) saved_bucket;// buckets的数目u32 nbuckets;u32 log2_nbuckets;u8 *name;// cache命中情况记录u64 cache_hits;u64 cache_misses;// 用于释放的内存碎片收集,便于下一次快速分配BVT (clib_bihash_value) ** freelists;// bihash的heap指针void *mheap; //heap地址// bihash对应的format函数,用于bihash打印format_function_t *fmt_fn;
} BVT (clib_bihash);
Bihash具体实现
接下来我们对bihash的具体实现从init过程,add/del过程,search过程,以及free过程进行进行简单介绍。
init过程
在这一过程中init函数主要做四件事情:
输出话bihash结构体的各个参数;
创建bihash的heap;
在heap中创建bucket的vec;
分配write_lock内存;
针对每个bucket初始化缓存index序列(如果cache使能了) cache_lru (0 1 2 3 4)
完成初始化后,其在内存中的情况如下图所示:

void BV (clib_bihash_init)(BVT (clib_bihash) * h, char *name, u32 nbuckets, uword memory_size)
{void *oldheap;int i;// 各种参数初始化nbuckets = 1 << (max_log2 (nbuckets));h->name = (u8 *) name;h->nbuckets = nbuckets;h->log2_nbuckets = max_log2 (nbuckets);h->cache_hits = 0;h->cache_misses = 0;// 通过mheap_alloc分配内存if (h->mheap == NULL) /* Allow customerized mheap, by Jordy*/h->mheap = mheap_alloc (0 /* use VM */ , memory_size);// 对该内存进行初始化,包括初始化bucket指针的vec,lock等oldheap = clib_mem_set_heap (h->mheap);vec_validate_aligned (h->buckets, nbuckets - 1, CLIB_CACHE_LINE_BYTES);h->writer_lock = clib_mem_alloc_aligned (CLIB_CACHE_LINE_BYTES,CLIB_CACHE_LINE_BYTES);h->writer_lock[0] = 0;// 针对每个bucket 初始化cachefor (i = 0; i < nbuckets; i++)BV (clib_bihash_reset_cache) (h->buckets + i);clib_mem_set_heap (oldheap);h->fmt_fn = NULL;
}
add/del过程
add/del过程我们以add和del,以及空桶和非空桶进行区别,分为四种情况进行讨论。
空桶add
1、空桶,即bucket->offset 为0;
2、为桶分配kvp存储空间(page), 先从h->freelists中查找,发现freelist为空,创建freelists的vec, 即*clib_bihash_value的vec;
3、创建pages,即BVT (clib_bihash_value)对象,并将bucket的offset设为该pages到heap->mheap的offset,将kvp放置于该page,并bucket的refcnt+=1。
其内存对应的结构如图所示:
空桶del
1、空桶,即bucket->offset 为0;
2、return -1即可。
非空桶add
1、找到对应的bucket,(b0),将b0在h->working_copy[threads_index]中复制一份;
2、将b0 (即,bucket[0]->offset)设在working_copy,即图中b0(add时),查找时,查找的是working_copy区,增加操作在h->saved_bucke区进行处理,保证线程安全;
a.不需要扩展的情况,即增加新kvp不会造成冲突:
1、完成增加后,b0重新指向h->saved_bucket。
b.需要扩展的情况:
扩展, pages×2, 内存从freelist中取,此时操作的区域是working_copy区(仅作为被复制的对应,不会影响查询)。
扩展分为两种,hash扩展和线性扩展
1.1、 hash扩展,原来的kvp,重新hash,落到new_bucket中,若hash的page发生碰撞,则hash扩展失败,释放new_pages,即将其挂在freelist中,进行b;
1.2、 线性扩展,原来的kvp按序落到new_bucket中, 标记new_pages-> linear_search=1;
2、扩展完成后,b0的offset为new_pages; 将kvp放置于new_pages,并bucket的refcnt+=1;
3、 释放h->saved_bucket, 即原来的pages,将该块存储空间的地址放入freelist[log2_pages]的表头。
扩展情况下,其非空桶add过程,内存对应的结构如下图所示:

非空桶del
1、找到对应的bucket,(b0),将b0在h->working_copy[threads_index]中复制一份,将b0 (即,bucket[0]->offset)设在working_copy处,即查找时,查找的是working_copy区,删除操作在h->saved_bucke区进行处理;
2、查找key,hash或者linear查找,找到key,删除之(置为全1);
3、h->saved_bucket.refcnt>1, 则自减1,b0.as_u64 = h->saved_bucket.as_u64 否则free该pages,将其放到freelists中。
int BV (clib_bihash_add_del)(BVT (clib_bihash) * h, BVT (clib_bihash_kv) * add_v, int is_add)
{u32 bucket_index;BVT (clib_bihash_bucket) * b, tmp_b;BVT (clib_bihash_value) * v, *new_v, *save_new_v, *working_copy;int rv = 0;int i, limit;u64 hash, new_hash;u32 new_log2_pages, old_log2_pages;u32 thread_index = os_get_thread_index ();int mark_bucket_linear;int resplit_once;// 计算kvp的hash值hash = BV (clib_bihash_hash) (add_v);// 桶定位bucket_index = hash & (h->nbuckets - 1);b = &h->buckets[bucket_index];hash >>= h->log2_nbuckets;tmp_b.linear_search = 0;// 上锁while (__sync_lock_test_and_set (h->writer_lock, 1));/* First elt in the bucket? */// 空桶情况if (b->offset == 0){if (is_add == 0){rv = -1;goto unlock;}v = BV (value_alloc) (h, 0);*v->kvp = *add_v;tmp_b.as_u64 = 0;tmp_b.offset = BV (clib_bihash_get_offset) (h, v);tmp_b.refcnt = 1;b->as_u64 = tmp_b.as_u64;goto unlock;}/* Note: this leaves the cache disabled *//* 为保证线程安全,进行bucket的备份,复制到working_copy中, * 将原bucket的指针指向这个working_copy中,* h->saved_bucket指向原bucket的内存位置* PS: working_copy中的per_thread没看出什么用,求解惑*/BV (make_working_copy) (h, b);// 找到bucket具体对应的pages v = BV (clib_bihash_get_value) (h, h->saved_bucket.offset);// 确定循环范围, hash则从指定page内直接找, linear则全桶找limit = BIHASH_KVP_PER_PAGE;v += (b->linear_search == 0) ? hash & ((1 << b->log2_pages) - 1) : 0;if (b->linear_search)limit <<= b->log2_pages;if (is_add){/** For obvious (in hindsight) reasons, see if we're supposed to* replace an existing key, then look for an empty slot.*/for (i = 0; i < limit; i++){ // key相同,更新原value值,结束if (!memcmp (&(v->kvp[i]), &add_v->key, sizeof (add_v->key))){clib_memcpy (&(v->kvp[i]), add_v, sizeof (*add_v));CLIB_MEMORY_BARRIER ();/* Restore the previous (k,v) pairs */b->as_u64 = h->saved_bucket.as_u64;goto unlock;}}for (i = 0; i < limit; i++){ // 找到第一个空solt(bihash中全1为空)if (BV (clib_bihash_is_free) (&(v->kvp[i]))){clib_memcpy (&(v->kvp[i]), add_v, sizeof (*add_v));CLIB_MEMORY_BARRIER ();b->as_u64 = h->saved_bucket.as_u64;b->refcnt++;goto unlock;}}/* no room at the inn... split case... */// 没有空solt,则需要进行扩展 }else//非空桶 del 情况{for (i = 0; i < limit; i++){ // 找key,然后删除之if (!memcmp (&(v->kvp[i]), &add_v->key, sizeof (add_v->key))){memset (&(v->kvp[i]), 0xff, sizeof (*(add_v)));CLIB_MEMORY_BARRIER ();if (PREDICT_TRUE (h->saved_bucket.refcnt > 1)){h->saved_bucket.refcnt -= 1;b->as_u64 = h->saved_bucket.as_u64;goto unlock;}else{ // bucket已经空了,将其释放,即放入freelist中tmp_b.as_u64 = 0;goto free_old_bucket;}}} // 没找到==rv = -3;b->as_u64 = h->saved_bucket.as_u64;goto unlock;}// 开始进行扩展old_log2_pages = h->saved_bucket.log2_pages;new_log2_pages = old_log2_pages + 1;mark_bucket_linear = 0;working_copy = h->working_copies[thread_index];resplit_once = 0;// 首先尝试哈希扩展,失败则进行线性扩展new_v = BV (split_and_rehash) (h, working_copy, old_log2_pages,new_log2_pages);if (new_v == 0){try_resplit:resplit_once = 1;new_log2_pages++;/* Try re-splitting. If that fails, fall back to linear search */new_v = BV (split_and_rehash) (h, working_copy, old_log2_pages,new_log2_pages);if (new_v == 0){mark_linear:new_log2_pages--;/* pinned collisions, use linear search */new_v =BV (split_and_rehash_linear) (h, working_copy, old_log2_pages,new_log2_pages);mark_bucket_linear = 1;}}/* Try to add the new entry */save_new_v = new_v;new_hash = BV (clib_bihash_hash) (add_v);limit = BIHASH_KVP_PER_PAGE;if (mark_bucket_linear)limit <<= new_log2_pages;new_hash >>= h->log2_nbuckets;new_hash &= (1 << new_log2_pages) - 1;new_v += mark_bucket_linear ? 0 : new_hash;for (i = 0; i < limit; i++){if (BV (clib_bihash_is_free) (&(new_v->kvp[i]))){clib_memcpy (&(new_v->kvp[i]), add_v, sizeof (*add_v));goto expand_ok;}}/* Crap. Try again */BV (value_free) (h, save_new_v, new_log2_pages);/** If we've already doubled the size of the bucket once,* fall back to linear search now.*/if (resplit_once)goto mark_linear;elsegoto try_resplit;expand_ok:tmp_b.log2_pages = new_log2_pages;tmp_b.offset = BV (clib_bihash_get_offset) (h, save_new_v);tmp_b.linear_search = mark_bucket_linear;tmp_b.refcnt = h->saved_bucket.refcnt + 1;free_old_bucket:CLIB_MEMORY_BARRIER ();b->as_u64 = tmp_b.as_u64;v = BV (clib_bihash_get_value) (h, h->saved_bucket.offset);BV (value_free) (h, v, h->saved_bucket.log2_pages);unlock:BV (clib_bihash_reset_cache) (b);BV (clib_bihash_unlock_bucket) (b);CLIB_MEMORY_BARRIER ();h->writer_lock[0] = 0;return rv;
}
search过程
1、对key进行hash;
2、根据hash值找到对应的bucket,若支持cache,则在bucket[k]->cache中查找,找到return 0;
3、在b0:new_pages 中查找,根据bucket[0]-> linear_search,进行hash或者线型查找,找到,则更新bucket[0]->cache,循环bucket[0]->cache_lru,否则return -1。
int BV (clib_bihash_search)(BVT (clib_bihash) * h,BVT (clib_bihash_kv) * search_key, BVT (clib_bihash_kv) * valuep)
{u64 hash;u32 bucket_index;BVT (clib_bihash_value) * v;
#if BIHASH_KVP_CACHE_SIZE > 0BVT (clib_bihash_kv) * kvp;
#endifBVT (clib_bihash_bucket) * b;int i, limit;ASSERT (valuep);// 计算hash值hash = BV (clib_bihash_hash) (search_key);// 定位bucketbucket_index = hash & (h->nbuckets - 1);b = &h->buckets[bucket_index];if (b->offset == 0)return -1;
// 若cache enable了 则先从cache中进行查找
#if BIHASH_KVP_CACHE_SIZE > 0/* Check the cache, if currently enabled */if (PREDICT_TRUE ((b->cache_lru & (1 << 15)) == 0)){limit = BIHASH_KVP_CACHE_SIZE;kvp = b->cache;for (i = 0; i < limit; i++){if (BV (clib_bihash_key_compare) (kvp[i].key, search_key->key)){*valuep = kvp[i];h->cache_hits++;return 0;}}}
#endifhash >>= h->log2_nbuckets;// 找到bucket具体对应的pagesv = BV (clib_bihash_get_value) (h, b->offset);// 确定查找范围limit = BIHASH_KVP_PER_PAGE;// hash从指定page开始查找,否则从头开始找v += (b->linear_search == 0) ? hash & ((1 << b->log2_pages) - 1) : 0;if (PREDICT_FALSE (b->linear_search))limit <<= b->log2_pages;// 循环查找for (i = 0; i < limit; i++){if (BV (clib_bihash_key_compare) (v->kvp[i].key, search_key->key)){*valuep = v->kvp[i];// 更新cache
#if BIHASH_KVP_CACHE_SIZE > 0u8 cache_slot;/* Shut off the cache */if (BV (clib_bihash_lock_bucket) (b)){cache_slot = BV (clib_bihash_get_lru) (b);b->cache[cache_slot] = v->kvp[i];BV (clib_bihash_update_lru) (b, cache_slot);/* Reenable the cache */BV (clib_bihash_unlock_bucket) (b);h->cache_misses++;}
#endifreturn 0;}}return -1;
}
free过程
释放mheap, munmap(h->mheap);
清空结构体,memset (h, 0, sizeof (*h))。
void BV (clib_bihash_free) (BVT (clib_bihash) * h)
{ // 释放内存mheap_free (h->mheap);// 清空bihash结构体memset (h, 0, sizeof (*h));
}
VPP:Bihash简介相关推荐
- Cisco VPP(1) 简介
一.简介 VPP全称Vector Packet Processing,是Cisco2002年开发的商用代码. 2016年2月11号,Linux基金会创建FD.io项目.Cisco将VPP代码的开源版本 ...
- VPP Agent 简介
文章目录 VPP Agent Overview VPP Agent 架构 体系架构图 VPP Agent 功能 VPP Agent Features VPP 配置和管理 重新同步 插件概念 说明 CN ...
- whois命令_WHOIS使用Whois搜索
whois命令 I used to do all of my WHOIS searches at a really popular website that I wont name here. I h ...
- Vector Packet Processing(VPP) (一)简介
目录 一.简介 二.扩展性 1.结点操作 2.可编程能力 三.网络功能 1.网络特性 2.网络性能 最近公司启动了一个新项目,是基于FD.io的开源项目VPP来进行开发的.由于VPP项目目前只支持对L ...
- VPP学习(一)VPP简介
VPP是一个快速的.可扩展的2-4层多平台网络协议栈.它运行在多个Linux用户空间中,主要架构包括x86.ARM和Power架构. VPP的高性能网络栈正在迅速成为世界各地应用程序的首选网络栈. 通 ...
- Cisco VPP:cop简介
Github-blog CSDN 注意:本文使用的代码是2018.05.07提交的master分支上的code,其具体commitID是c22fcba177bad2c755fdb6d4d52f2a79 ...
- 电子设计竞赛电源题(1)-电源题简介
全国大学生电子设计竞赛是教育部和工业和信息化部共同发起的大学生学科竞赛之一,是面向大学生的群众性科技活动,目的在于推动高等学校促进信息与电子类学科课程体系和课程内容的改革.竞赛的特点是与高等学校相关专 ...
- 51单片机雾化片自动扫频程序_单片机简介
单片机简介 数字电路简介 在一个控制系统中, 单片机是电路的一部分, 单片机中的程序是针对其所在的电路编写 的.因此,要对单片机编程并实现一定的功能,必须了解整个系统的电路图.单片机编程是 针对某个特 ...
- FD.io VPP 20.09版本正式发布:往期VPP文章回顾+下载地址+相关链接
目录 下载RPM/DEB包 往期文章回顾与推荐 FD.io是一些项目和库的集合,基于DPDK并逐渐演化,支持在通用硬件平台上部署灵活可变的业务.FD.io为软件定义基础设施的开发者提供了一个通用平台, ...
- FD.io VPP环境下运行用户应用程序教程
FD.io VPP环境下运行用户应用程序教程 RToax 2020年9月 相关文章:<FD.io VPP利用iperf3进行UDP灌包测试-英特尔X520万兆网卡> 1. VPP简介 VP ...
最新文章
- 数字图像处理:(4)二阶微分在数字图像处理中的应用
- iOS开发 贝塞尔曲线UIBezierPath(后记)
- 快速判断一个数是否是4的幂次方,若是,并判断出来是多少次方! .
- lua C++ wrapper
- 1090 Highest Price in Supply Chain (25)(25 分)
- java 品尝饮料,java细节经典题型
- 【Java】深入理解Java虚拟机的读书笔记
- 解决aapt命令在Linux下无法运行的问题
- 第13章 图像像素采样(《Python趣味创意编程》教学视频)
- webvector将html转为svg或者png图片的工具
- linux adobe flash 安装,Ubuntu 12.10下为Firefox安装Adobe Flash Player
- 数字转换大写 python_数字转换
- 网络安全相关证书有哪些?
- uniapp实现点击回到顶部
- js获取上周、本周、上月、本月、第一天和最后一天
- Js根据域名判断显示不同内容
- PyCharm2017破解步骤
- CentOS7.9安装教程,以及出现dracut- initqueue timeout-starting…starting timeout scripts 解决办法,linux配置静态IP地址
- 去除桌面快捷方式上的小箭头
- 计算机维修过程中应该遵循的步骤,水泥回转窑维修过程中需要遵循的方法和注意事项...