JuMP: 用Julia进行优化建模及求解- 覃含章的文章 - 知乎 https://zhuanlan.zhihu.com/p/40807662
JuMP: 用Julia进行优化建模及求解 - 覃含章的文章 - 知乎 https://zhuanlan.zhihu.com/p/40807662
0. 为什么要用Julia做优化?
本文是我在Julia中文社区2018用户见面会上关于用Julia进行优化建模及求解的分享内容。
本Tutorial主要介绍JuMP.jl,一种在Julia语言中的开源AML(Algebraic Modeling Language), 类似于AMPL, YALMIP, CVX, Poymo, GAMS等。JuMP的优化建模+solver内存传递速度,与其它商业/开源AML的比较见下表。不涉及Convex.jl,类似Matlab中的CVX,由Boyd et al. 开发的另一种Julia中的AML。
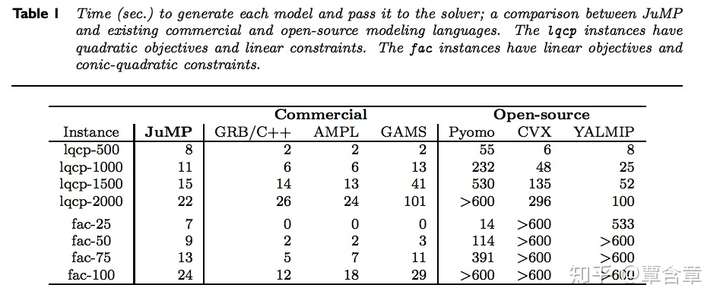
该表来自:Dunning, Iain, Joey Huchette, and Miles Lubin. JuMP: A modeling language for mathematical optimization. SIAM Review 59.2 (2017): 295-320. 更多JuMP的实现细节和与其它AML的比较可参
我们发现JuMP在优化建模速度上不输商业AML,比其它的开源AML要明显快出许多。
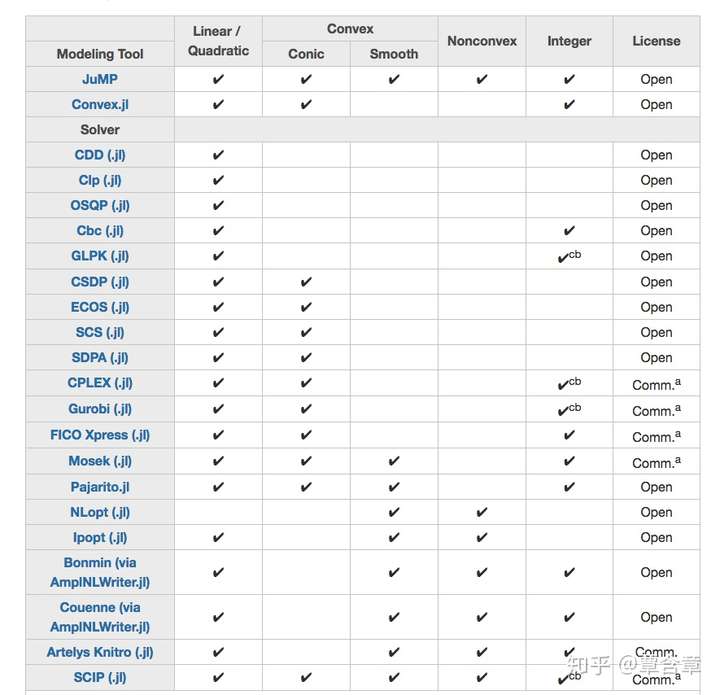
该表来自:https://www.juliaopt.org/
JuMP的另一大好处在于无缝衔接各种商业/开源solver: Gurobi, CPLEX, SCIP, Knitro, Mosek等......
1. 优化建模初步(最基本的线性规划)
(这部分主要针对优化理论零基础的读者,例子来自于——覃含章:运筹学中应该如何理解互补松弛性。这条性质又该如何运用?)
假设你是一个木匠,出售手工制作的木头桌子和木头椅子。现在你想要制定一个生产计划,让这个月的利润最大化。
注意,生产一张桌子,或者一把椅子,都需要消耗一定数量的木材和时间,而作为一个手工小作坊,你每个月能用来生产的时间是有限的,你每个月能进到的木材也是有限的。
简单起见,我们假定桌子的利润固定为一张10元,椅子为一把3元。生产一张桌子需要5单位木材和3单位时间,生产一把椅子需要2单位木材和1单位时间。且我们所有生产的桌子椅子都是能被卖掉的。先假设当月我们总共有200单位木材和90单位时间。
显然,这个生产规划问题可以用线性规划来建模:
根据对偶理论,我们也知道等价的对偶问题为:
# 利用JuMP求解原问题
function CarpenterPrimal(c,A,b)# 定义Model对象, OutputFlag = 0指不输出logPrimal = Model(solver = GurobiSolver(OutputFlag = 0))# 定义变量,注意这里使用了宏(macro),宏的调用也是Julia&JuMP高效编译/元编程(metaprogramming)的重要技巧@variable(Primal, x[1:2]>=0)# 定义不等式约束constr = @constraint(Primal, A*x.<=b)# 定义目标函数@objective(Primal, Max, dot(c,x))# 求解solve(Primal)# 返回最优目标函数值,最优解(原问题),最优解(对偶问题)return getobjectivevalue(Primal), getvalue(x), getdual(constr)
end调用CarpenterPrimal函数,得到最优解是生产30张桌子,不生产椅子: 。接下来我们看一下这个解背后所蕴含的其他信息。同时,对应木材和时间的影子价格
是0和10/3。
我们指出,也可以利用JuMP进行敏感度分析(Sensitivity Analysis)。考虑以下四个(P)的变种问题:(当然,其实都可以手解,用CarpenterPrimal进行验证)
(1) 把(P)中的(P1)右端项改成250,即木材总量增加。其余不变。最优解是什么?
(2) 把(P)中的(P2)右端项改成120,即生产时间增加。其余不变。最优解是什么?增加的利润(相比原来的(P))和(P2)的影子价格的关系?
(3) 假设桌子的单位利润不变,椅子的单位利润增加到多少的时候(P)的最优解开始生产椅子(而不生产桌子)?
(4) 假设时间的总量仍为90,木材的总量减少到多少的时候木材的影子价格严格大于0(时间的影子价格反而变成0)?
如对这些基本概念不熟悉,可参阅本节一开始提到的我的回答。
2. 线性规划中的Column Generation实例:大规模additive convex regression
给定数据 我们考虑以下线性规划问题:
注意我们如果在目标函数中再额外加上正则项 (
), 则我们可以得到一个稀疏的(sparse) additive model。详见:Ravikumar, Pradeep, et al. "Sparse additive models." Journal of the Royal Statistical Society: Series B (Statistical Methodology) 71.5 (2009): 1009-1030.
上述模型是线性规划因为等价于(记 为
升序排序后的对应原index的序列)
# 生成样本
n = 5000
d = 2
function_list = [x->0.5*abs.(x).^2,x->2*abs.(x),x->5*x.^2,x->0.5*exp.(x),x->0.3*x,x->0.7*x,x->2*x.^2,x->0.1*exp.(x),x->x.^2,x->exp.(x)]
srand(123)
X = rand(n,d) - 0.5
Y = 0.02*randn(n,1)
for i = 1:dY = Y + function_list[mod(i-1,10)+1](X[:,i])
end# Full-sized的线性规划模型
function Full_ConvReg(Max_T)M_conv_full = Model(solver=GurobiSolver(TimeLimit=Max_T, OutputFlag=0))@variable(M_conv_full, f_hat[1:n,1:d])@variable(M_conv_full, Res_pos[1:n]>=0)@variable(M_conv_full, Res_neg[1:n]>=0) for k = 1:dxx = X[:,k] ids = sortperm(vec(xx),rev=false)xx = xx[ids]for i in 2:(n-1)d1 = (xx[i+1]-xx[i]); d2=(xx[i]-xx[i-1]);@constraint(M_conv_full, (f_hat[ids[i],k]-f_hat[ids[i-1],k])*d1<=(f_hat[ids[i+1],k]-f_hat[ids[i],k])*d2);end endfor i in 1:n@constraint(M_conv_full, Y[i] - sum(f_hat[i,k] for k=1:d) == Res_pos[i] - Res_neg[i] )end @objective(M_conv_full, :Min, sum(Res_pos[i] + Res_neg[i] for i = 1:n) ) solve(M_conv_full) return getvalue(f_hat)
end接下来我们介绍什么是Column Generation,并展示如何对上述问题利用JuMP和Gurobi进行Column Generation。这种方法是基于单纯形法(simplex methopd)的。即我们在一开始默认所有的变量都为0且不是基变量,而在每步iteration的时候利用前一轮的对偶变量的值计算reduced cost(只需要计算一步矩阵和向量的乘法),并将reduced cost最负的变量加入(成为基变量)。同时注意到,因为原问题的约束矩阵实际上具有分块特性(按照 分块),实际上我们可以采取Dantzig-Wolfe的formulation,即利用一个cyclic的update方式,在每个iteration对每个block单独计算reduced cost(比一起算快了
倍)。当所有reduced cost非负的时候,找到最优解:算法终止。
对Dantzig-Wolfe或者column generation不太了解的同学,请见一些经典的资料,如:https://perso.uclouvain.be/anthony.papavasiliou/public_html/DantzigWolfe.pdf
当然,第五个例子里的constraint generation其实原理和column(variable) generation类似,那个例子对于零背景知识的同学可能更容易看。
# Column Generation化的线性规划模型
function CG_ConvReg(Max_T)# build the LO: no Δ includedM_conv = Model(solver=GurobiSolver(TimeLimit = Max_T,OutputFlag = 0,Method = 0))@variable(M_conv, Res_pos[1:n]>=0)@variable(M_conv, Res_neg[1:n]>=0)@constraintref constr[1:n]MaxIter = 1000XX = zeros(n,d)L = zeros(n,n+2,d)ids = convert(Array{Int64,2},zeros(n,d))ids_rec = convert(Array{Int64,2},zeros(n,d))for k = 1:d# sort the sequencesids[:,k] = sortperm(vec(X[:,k]),rev=false)ids_rec[:,k] = sortperm(ids[:,k],rev=false)XX[:,k] = X[ids[:,k],k] # needed for column generationL[:,1,k] = ones(n,1)L[:,2,k] = -ones(n,1)L[2,3,k] = XX[2] - XX[1]L[2,4,k] = - XX[2] + XX[1]for i = 3:nL[i,3,k] = XX[i,k] - XX[1,k]L[i,4,k] = - XX[i,k] + XX[1,k]L[i,5:i+2,k] = [XX[i,k]-XX[j+1,k] for j=1:i-2]'endL[:,:,k] = L[ids_rec[:,k],:,k] end@constraint(M_conv, constr[i=1:n], Res_pos[i] - Res_neg[i] == Y[i])@objective(M_conv, :Min, sum(Res_pos[i] + Res_neg[i] for i = 1:n) )solve(M_conv)dual_var = getdual(constr)NewColumns = [Variable[] for i=1:d]IdxList = [[] for i=1:d] # Implement column generation iter = 1 flag = vec(ones(d,1))while sum(flag) > 1e-3 && iter < MaxIter#for t = 1:30for k = 1:d if flag[k] == 1 Δ_r = -L[:,:,k]'*dual_var elsecontinueendif findmin(Δ_r)[1] < -1e-3idx = findmin(Δ_r)[2]constr_list = constr[1:n]coeff_list = L[:,idx,k]@variable(M_conv, Δ_temp >= 0, objective = 0., inconstraints = constr_list, coefficients = coeff_list ) #print("CG iteration ", iter,": enter Δ ",idx," for covariate ",k, "\n")push!(NewColumns[k],Δ_temp)push!(IdxList[k],idx)solve(M_conv) iter = iter + 1dual_var = getdual(constr);else#print("Skip covariate ", k,"\n")flag[k] = 0endendend#print("CG ends after ", iter-1, " itertaions.\n")# Retrieve the ϕ valuesdelta = zeros(n+2,d)zz = zeros(n,d)phi = zeros(n,d)for k = 1:ddelta[IdxList[k],k]=getvalue(NewColumns[k])if isempty(find(IdxList[k].==2))zz[1,k] = delta[1,k]elsezz[1,k] = -delta[2,k]endif isempty(find(IdxList[k].==4))zz[2,k] = delta[3,k]elsezz[2,k] = -delta[4,k]endphi[1,k] = zz[1,k]phi[2,k] = zz[1,k]+zz[2,k]*(XX[2,k]-XX[1,k]) for i = 3:nzz[i,k] = zz[i-1,k] + delta[i+2,k]phi[i,k] = zz[i,k]*(XX[i,k]-XX[i-1,k])+phi[i-1,k]endendreturn phi
endphi = CG_ConvReg(200);
# 画出第一维上的解
XX = zeros(n,d)
ids = convert(Array{Int64,2},zeros(n,d))
ids_rec = convert(Array{Int64,2},zeros(n,d))for k = 1:d # sort the sequencesids[:,k] = sortperm(vec(X[:,k]),rev=false)ids_rec[:,k] = sortperm(ids[:,k],rev=false)XX[:,k] = X[ids[:,k],k]
end
plot(XX[:,1],phi[:,1])
接下来我们比较这两种formulation的求解速度。
@benchmark CG_ConvReg(200)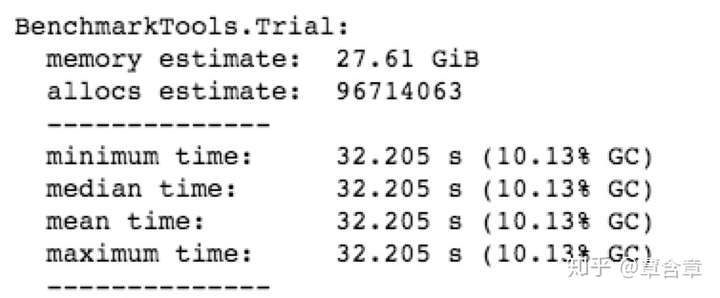
@benchmark Full_ConvReg(600)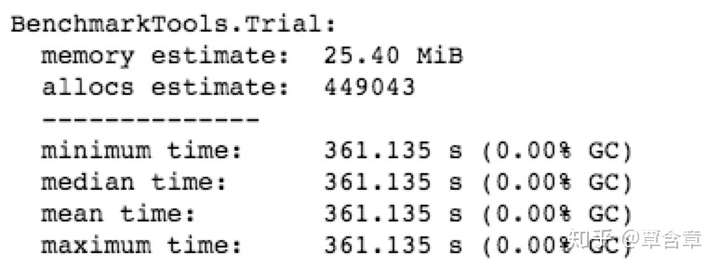
令人惊讶的是,基于古老的单纯形法和Column Generation的算法竟然要远快于Gurobi求解LP默认的non-deterministic concurrent方法!这证明针对特定的优化问题,有时候更聪明的建模会给你更快的算法。
3. 鲁棒线性规划(Robust Linear Programming)
我们考虑最小费用流问题(minimum cost flow),其中每条边上的cost具有不确定性(uncertainty)。即我们考虑一个有向图 ,我们考虑优化问题:
# Nominal Problem
function NominalProblem(n,μ,δ)NetworkModel = Model(solver=GurobiSolver(OutputFlag=0))capacity = (ones(n,n)-eye(n,n))*0.5capacity[1,n] = 0capacity[n,1] = 0@variable(NetworkModel, flow[i=1:n,j=1:n]>=0)@constraint(NetworkModel, flow .<= capacity)@constraint(NetworkModel, sum(flow[1,i] for i=1:n)==1)@constraint(NetworkModel, sum(flow[i,n] for i=1:n)==1)for j = 2:n-1@constraint(NetworkModel, sum(flow[i,j] for i=1:n) == sum(flow[j,k] for k=1:n) )end@objective(NetworkModel,Min, sum(flow[i,j]*μ[i,j] for i=1:n for j=1:n) );solve(NetworkModel)return getvalue(flow)
end我们考虑以下三种uncertainty set:
其实,容易知道(i)(ii)的robust min cost flow问题仍可写成一个线性规划,(iii)的robust min cost flow问题可写成一个二阶锥规划问题(second-order cone optimization)。不过我们这里展示利用JuMPeR包可以省去推导robust counterpart的步骤。
# Robust Problem
function RobustProblem(n,μ,δ,Γ,norm_type)NetworkModel_robust = RobustModel(solver=GurobiSolver(OutputFlag=0))capacity = (ones(n,n)-eye(n,n))*0.5capacity[1,n] = 0capacity[n,1] = 0@variable(NetworkModel_robust, flow[i=1:n,j=1:n]>=0)@uncertain(NetworkModel_robust, cost[i=1:n,j=1:n])@uncertain(NetworkModel_robust, r[i=1:n,j=1:n])@variable(NetworkModel_robust, obj) for i = 1:nfor j = 1:n@constraint(NetworkModel_robust, cost[i,j] == μ[i,j]+r[i,j]*δ[i,j])endend @constraint(NetworkModel_robust, norm(r,norm_type) <= Γ)@constraint(NetworkModel_robust, flow .<= capacity)@constraint(NetworkModel_robust, sum(flow[1,i] for i=1:n) == 1)@constraint(NetworkModel_robust, sum(flow[i,n] for i=1:n) == 1)for j = 2:n-1@constraint(NetworkModel_robust, sum(flow[i,j] for i=1:n) == sum(flow[j,k] for k=1:n))end@constraint(NetworkModel_robust, sum(cost[i,j]*flow[i,j] for i=1:n for j=1:n) <= obj )@objective(NetworkModel_robust, Min, obj)solve(NetworkModel_robust)return getvalue(flow)
end我们这里做一些仿真来看一下robust solution的表现。假设G是完全连同的,所有边的容量都是0.5,我们随机产生
,然后我们再随机产生
来看实际的cost的情况。我们以nominal problem的解为benchmark,输出robust solution的cost与其的差。
function Evaluation()n_type = [10,25,50,75,100]Γ_type = [1e-4,1e-1,1e1,1e4]report_data = zeros(13,5)for n_idx = 1:5n = n_type[n_idx]count = 2μ = 10*rand(n,n)δ = zeros(n,n)for i = 1:nfor j = 1:nδ[i,j] = μ[i,j]*rand()endendcost_sim = zeros(n,n)for i = 1:nfor j = 1:ncost_sim[i,j] = μ[i,j] + δ[i,j] * (rand()-0.5) * 2endendsol_0 = NominalProblem(n,μ,δ)report_data[1,n_idx] = sum(sum(cost_sim.*sol_0))for Γ in Γ_typeprint("n=",n," Γ=",Γ)sol_inf = RobustProblem(n,μ,δ,Γ,Inf)sol_1 = RobustProblem(n,μ,δ,Γ,1)sol_2 = RobustProblem(n,μ,δ,Γ,2) report_data[count,n_idx] = sum(sum(cost_sim.*(sol_inf-sol_0)))report_data[count+1,n_idx] = sum(sum(cost_sim.*(sol_1-sol_0) ))report_data[count+2,n_idx] = sum(sum(cost_sim.*(sol_2-sol_0) ))count = count + 3endendreturn report_data
end
output = Evaluation();
# 输出Γ=10时三种uncertainty set给出的difference
temp_p = plot([10,25,50,75,100],output[8,:],xlabel = "n", label = "Uinf")
plot!(temp_p,[10,25,50,75,100],output[9,:], label = "U1")
plot!(temp_p,[10,25,50,75,100],output[10,:], label = "U2")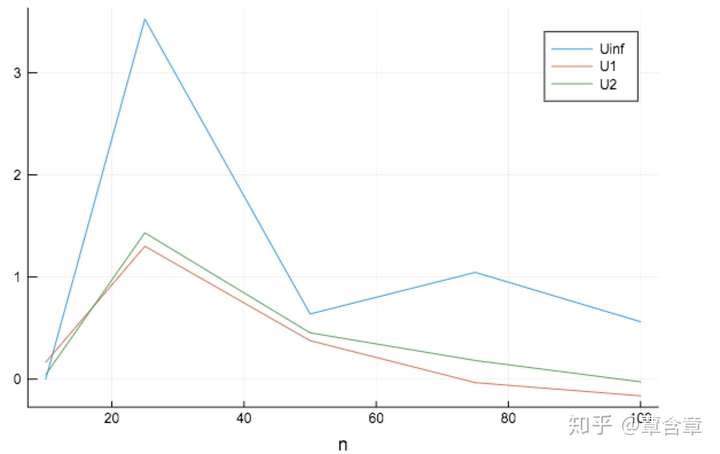
那么我们确实看到box constraint给出了更robust的solution,而L1/2 uncertainty构建下的鲁棒优化问题更mild一些。
JuMPeR也可以model多阶段的鲁棒优化问题,尤其比如是affinely-adjustable policy的(这比uncertainty set的formulation要松的多)。这里只是提一下,不详细介绍了,有兴趣的同学可以自行研究,其实也是很有用的。
4. 近似解Stable Number: 半正定规划/整数规划
一个无向图 的stable(independent) set是V的一个子集,其中所有节点互相都不相连。 stable set的最大cardinality定义为α(G),也叫做图的stability number. 假设|V|=n. 自然,其0/1整数规划可以写成:
利用 和
等价, 我们可以得到一个半正定规划的relaxation:
例子来源:Pena, Javier, Juan Vera, and Luis F. Zuluaga. "Computing the stability number of a graph via linear and semidefinite programming." SIAM Journal on Optimization 18.1 (2007): 87-105.
function StableBin(A)n = size(A,1)StableB = Model(solver = GurobiSolver(OutputFlag = 0))@variable(StableB, x[1:n], Bin)for i = 1:nfor j in find(A[i,:].== 1)@constraint(StableB, x[i] + x[j] <= 1)endend@objective(StableB, Max, sum(x))solve(StableB)return getobjectivevalue(StableB)
endfunction StableSDP(A)n = size(A,1)StableDD = Model(solver = MosekSolver(MSK_IPAR_LOG = 0))@variable(StableDD, X[1:n,1:n])@SDconstraint(StableDD, X>=0)@constraint(StableDD, X.>=0)@constraint(StableDD, sum(sum(A.*X)) == 0 )@constraint(StableDD, sum(X[i,i] for i=1:n) == 1)@objective(StableDD, Max, sum(sum(X)))solve(StableDD)return getobjectivevalue(StableDD)
end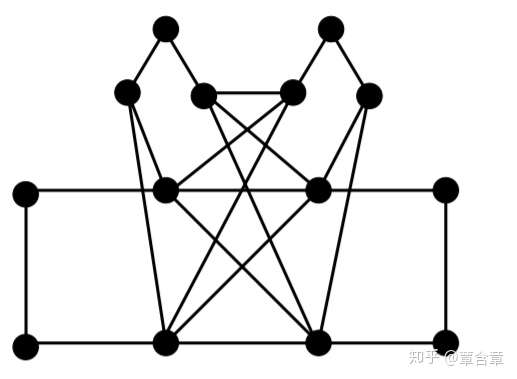
以这个G为例子。
A14 = [0 1 1 0 0 0 0 0 0 0 0 0 0 0; 1 0 0 1 0 0 0 0 0 0 0 0 0 0;1 0 0 0 1 1 0 0 1 0 0 1 0 0;0 1 0 0 1 1 0 0 1 0 0 1 0 0;0 0 1 1 0 0 1 0 0 0 1 0 0 1;0 0 1 1 0 0 0 1 0 0 1 0 0 1;0 0 0 0 0 1 0 1 0 0 0 0 0 0;0 0 0 0 0 1 1 0 0 0 0 0 0 0;0 0 1 1 0 0 0 0 0 1 0 0 0 0;0 0 0 0 0 0 0 0 1 0 1 0 0 0;0 0 0 0 1 1 0 0 0 1 0 1 0 0;0 0 1 1 0 0 0 0 0 0 1 0 1 0;0 0 0 0 0 0 0 0 0 0 0 1 0 1;0 0 0 0 1 1 0 0 0 0 0 0 1 0];
# α(G14) = 5
StableBin(A14)
# 松弛之后的解:5.694362954824882
StableSDP(A14)5. Lazy Constriant Generation: 在整数规划中用分段线性函数近似L2球
我们指出Gurobi还暂不支持整数规划和column generation结合(即branch and price),然而自定义user cut确是支持的(即branch and cut)!简单来说,即我们可以一开始只加入少量的约束,在一边求解整数规划的过程中将被violate的约束加入,因此也叫lazy callback。
这个例子来自于:https://github.com/JuliaOpt/juliaopt-notebooks/blob/master/notebooks/JuMP-LazyL2Ball.ipynb
我们要求解的问题是一个整数约束的二阶锥规划问题:
function solve_ball(c, Γ, ϵ=1e-6)n = length(c)m = Model(solver=GurobiSolver(OutputFlag=0))# 初始consrtaint: 一个box@variable(m, -Γ ≤ x[1:n] ≤ Γ, Int)# 定义目标函数@objective(m, Max, dot(c,x))#核心:定义callback function,记录加入cut的数量num_callbacks = 0function norm_callback(cb)num_callbacks += 1N = getvalue(x)# 求得当前x的L2 normL = norm(N)# 如果足够小,说明已经得到一个可行解,即解最优if L ≤ Γ + ϵreturnend# 不然的话,加入cut!注意这个cut将使得x变得不可行(infeasible),下步迭代必然会得到一个新的解@lazyconstraint(cb, dot(N,x) ≤ Γ*L)end# 将callback函数加入JuMP/Gurobi模型addlazycallback(m, norm_callback)#求解solve(m)return getvalue(x), num_callbacks
end#产生一个随机样例
srand(1234)
n = 2
c = rand(n)
Γ = 50.0# 求解,输出callback次数
sol, num_callbacks = solve_ball(c, Γ)
println(sol)
println(norm(sol))
println(num_callbacks)经过11次lazycallback我们得到最优解。接下来还有个交互的例子,我这边懒得做动画了,只给code。效果请自行在jupyter notebook里体验。实际上就是说可以手动在bar上调整参数看到不同情况下的最优解和可行域在二维平面的图像。
# 这里展示Interact和Compose包,可用来进行交互
# 画出2D情况下的解
set_default_graphic_size(8cm, 8cm)@manipulate for c1 in -1:0.1:+1, c2 in -1:0.1:+1, logϵ in -4:2sol, _ = solve_ball([c1,c2], 100, 10.0^logϵ)compose(context(),compose(context(),line([(0.5,0.5),(0.5+sol[1]/300,0.5+sol[2]/300)]),Compose.stroke("black")),compose(context(),circle((0.5 + (100/norm(sol))*sol/300)...,0.02),fill("red")),compose(context(),circle(0.5,0.5,0.333),fill("lightblue")))
end6. 一般的非线性整数规划:密堆积球问题
我们考虑这样一个问题:有k个半径为r的球和一个尺寸d1×d2的长方形盒子,是否有办法将这些球塞入长方形?显然,一个更一般的问题是对任意长方形找到最大的k。不过这个一般的问题可以通过顺序求解(不断增大k)之前的决策问题来解决,所以我们就讨论给定k的决策问题。
定义变量 为圆心的x和y坐标. 那么决策问题可以用如下非凸非线性规划问题来求解, 也见:Birgin, Ernesto G., J. M. Martınez, and Débora P. Ronconi. "Optimizing the packing of cylinders into a rectangular container: a nonlinear approach." European Journal of Operational Research 160.1 (2005): 19-33.
和上一节思路类似,我们这里也利用分段线性函数和整数规划来近似这里的L2函数。当然,我们这里采取更一般的做法,利用PiecewiseLinear包来方便完成。具体来说,我们考虑用整数线性规划近似如下非线性规划中的非凸约束。
# 画图
function PlotCirclesRectangle(p1,p2)p = scatter((p2),(p1))for i = 1:kplot!(p,(p2[i]).+r*cos.(linspace(0,2*π,100)), (p1[i]).+r*sin.(linspace(0,2*π,100)), color = "blue", legend=false, aspect_ratio = 1 )endplot!(p,linspace(0,d2,100),zeros(100,1),color = "red")plot!(p,zeros(100,1),linspace(0,d1,100),color = "red")plot!(p,linspace(0,d2,100),ones(100,1)*d1,color = "red")plot!(p,d2*ones(100,1),linspace(0,d1,100),color = "red")p
end# 考虑这样一组问题
r = 25
d1 = 160
d2 = 190
k = 11;
# MIO
function PackCirclesGen(r,d1,d2,k,Method,MaxTime)tic()PackCircles = Model(solver = GurobiSolver(MIPGap = 1e-3, OutputFlag = 0, TimeLimit = MaxTime))@variable(PackCircles, p1[1:k]>=r)@variable(PackCircles, p2[1:k]>=r)@variable(PackCircles, s1[1:k,1:k])@variable(PackCircles, s2[1:k,1:k]>=0)@variable(PackCircles, z[1:k,1:k]>=0)@constraint(PackCircles, p1.<=d1-r)@constraint(PackCircles, p2.<=d2-r)for i = 1:kfor j = i+1:kif j - i > 2 continueend@constraint(PackCircles,s1[i,j] == p1[j]-p1[i])@constraint(PackCircles,s2[i,j] == p2[j]-p2[i])#使用PiecewiseLinearOpt包近似nonconvex constraintfun_dist = piecewiselinear(PackCircles, s1[i,j] , s2[i,j], -(j-i)*r*2:r/5:(j-i)*r*2, 0:r/5:(j-i)*r*2, (u,v) -> (u^2+v^2)^0.5, method=Method)@constraint(PackCircles, z[i,j] >= 2*r - fun_dist )endend@objective(PackCircles, Min, sum(z[i,j] for i = 1:k for j = i+1:k))solve(PackCircles)return getvalue(p1),getvalue(p2),toc()
end
p1,p2,time = PackCirclesGen(r,d1,d2,k,:ZigZagInteger,Inf);
# 一个可行解
PlotCirclesRectangle(p1,p2)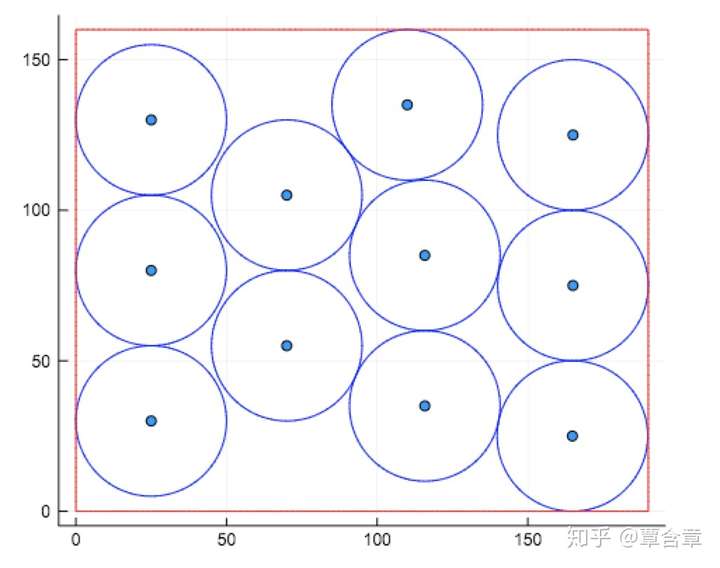
这个程序也可以作为这个知乎问题的探索:
2×1000的矩形中能放多少个直径为1的圆?www.zhihu.com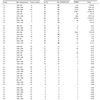
# 不同bivariate分段线性方法的比较
r = 21
d1 = 120
d2 = 120
k = 6;
Method_List = [:CC,:MC,:DisaggLogarithmic,:SOS2,:Logarithmic,:ZigZag,:ZigZagInteger]
# The experiment, note the cutoff time set as 600 seconds
for Method in Method_Listp1,p2,time = PackCirclesGen(r,d1,d2,k,Method,600)print("The method ", Method, " uses ", time, " seconds!\n")
end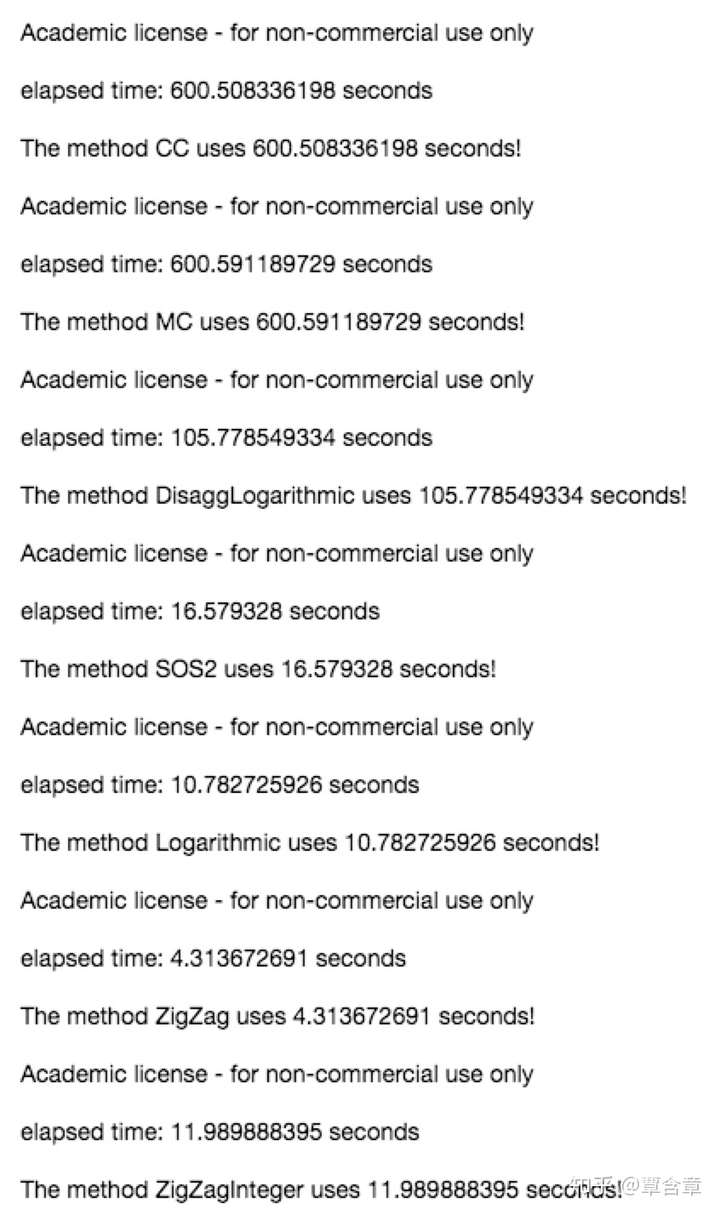
我们注意到不同的线性分段逼近方法的计算速度是大不一样的,ZigZag的速度最快,CC/MC这样的formulation一般不建议用。详细的理论方法请见:Huchette, Joey, and Juan Pablo Vielma. "Nonconvex piecewise linear functions: Advanced formulations and simple modeling tools."
7. 更多
这篇Tutorial的GitHub链接,包括meetup上其它的julia相关资料:
JuliaCN/MeetUpMaterialsgithub.com
其它JuMP支持的优化拓展包可见:https://www.juliaopt.org/packages/
比如,支持多目标优化的MultiJuMP.jl,机会约束(chance constraint)的JuMPChance.jl,多项式(polynomial)优化的 PolyJuMP.jl,还有支持随机动态规划,非线性控制,平衡约束问题,图论算法,元启发式算法等等的package。
JuMP: 用Julia进行优化建模及求解- 覃含章的文章 - 知乎 https://zhuanlan.zhihu.com/p/40807662相关推荐
- 2021年全国研究生数学建模竞赛华为杯D题抗乳腺癌候选药物的优化建模求解全过程文档及程序
2021年全国研究生数学建模竞赛华为杯 D题 抗乳腺癌候选药物的优化建模 原题再现: 一.背景介绍 乳腺癌是目前世界上最常见,致死率较高的癌症之一.乳腺癌的发展与雌激素受体密切相关,有研究发现 ...
- UA SIE545 优化理论基础0 优化建模6 罐头的尺寸设计
UA SIE545 优化理论基础0 优化建模6 罐头的尺寸设计 我们的目标是设计一种罐头,这种罐头产品按件出售,一件12个罐头,按3行一行四个的形式排列,同时有以下信息: V0V_0V0:罐头的最小 ...
- 电气论文:梯级水电站调度优化建模(文末有程序下载链接)
系列文章目录 个人电气博文传送门:学好电气全靠它,个人电气博文目录(持续更新中-) 本文针对梯级水电站调度优化进行建模,简单文字描述加程序共22页.matlab 和python双语言编写. 作 ...
- Pyomo 优化建模
Pyomo 优化建模 1. Pyomo 2. 安装 3. 简例 3.1. 具体模型 3.2. 抽象模型 1. Pyomo Pyomo 是一种基于Python的开源优化建模语言,具有多种优化功能 在Py ...
- 灰狼优化算法GWO求解置换流水车间调度问题FSP
灰狼优化算法GWO求解置换流水车间调度问题 置换流水车间调度问题(PFSP)是一类最基本.最经典的流水车间调度问题,本文主要讨论使用灰狼优化算法(GWO)求解单目标PFSP. 置换流水车间调度问题模型 ...
- (最优化理论与方法)第三章优化建模-第一节:优化建模和常见建模技术
文章目录 一:优化建模概述 二:目标函数的设计 (1)最小二乘法 (2)正则化 (3)最大似然估计 (4)代价.损失.收益函数 (5)泛函.变分 (6)松弛 三:约束的设计 (1)问题本身的物理性质 ...
- UA SIE545 优化理论基础0 优化建模1 优化问题的基本形式
UA SIE545 优化理论基础0 优化建模1 优化问题的基本形式 优化问题的基本形式 确定性优化问题 随机优化问题 Stochastic Programming(SP) Robust Optimiz ...
- 鲸鱼优化算法WOA求解旅行商TSP优化问题(2022.6.2)
鲸鱼优化算法WOA求解旅行商TSP优化问题(2022.6.2) 引言 1.鲸鱼优化算法WOA 1.1 WOA算法原理介绍 1.1.1 包围猎物 1.1.2 气泡网式攻击猎物(开发阶段) 1.1.3 寻 ...
- 带容量约束的p-中值选址问题建模与求解
带容量约束的p-中值选址问题建模与求解 1. 简介 选址理论的研究,最早始于1909 年,Weber 研究如何在平面上确定一个仓库位置,使仓库与顾客间的总距离最小(也称为 韦伯问题) :而后在1964 ...
最新文章
- 圈钱的道路上廖翔从不缺席
- 阿里云地图添加点线面
- Spring Cloud 2021.0.1 发布
- 使用 PyTorch 数据读取,JAX 框架来训练一个简单的神经网络
- ubuntu安装python3.6_Ubuntu上安装python3.6以及多版本python管理 | SQN
- coreseek java_使用python测试sphinx(coreseek)做全文索引
- linux awr 日志,生成AWR报告
- Windows 7精简版(2019.04.10)
- 关于PostgreSQL软件安装后出现解决the application server could not be contect ed错误的方法
- 白山搜索引擎优化收费_百度搜索引擎优化收费标准
- matlab中clc什么意思,MATLAB中clc是什么意思
- 【MySQL从入门到精通】【高级篇】(九)InnoDB的B+树索引的注意事项
- projece修改工期_project里工期如何更改为自然日
- 百度智能云 x 民生银行 | 智能+创新,数字化运营再升级
- 远距离遥控玩具中的8通道无线收发芯片
- android system.err 是什么意思,android – java.lang.IllegalStateException是什么意思?
- RS485——A与B波形与电路分析
- 就在今晚!年度最大“超级月亮”来了!!!
- v-show和v-if有什么区别?使用场景分别是什么?
- Virtualbox 启用USB 设备支持