A*算法详解(讲的一级棒 )
转自:https://blog.csdn.net/hitwhylz/article/details/23089415
概述
虽然掌握了 A* 算法的人认为它容易,但是对于初学者来说, A* 算法还是很复杂的。
搜索区域(The Search Area)
我们假设某人要从 A 点移动到 B 点,但是这两点之间被一堵墙隔开。如图 1 ,绿色是 A ,红色是 B ,中间蓝色是墙。
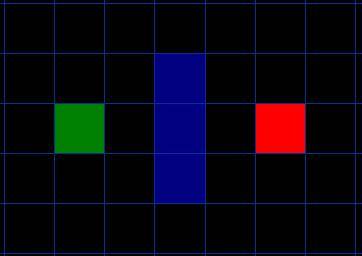
图 1
你应该注意到了,我们把要搜寻的区域划分成了正方形的格子。这是寻路的第一步,简化搜索区域,就像我们这里做的一样。这个特殊的方法把我们的搜索区域简化为了 2 维数组。数组的每一项代表一个格子,它的状态就是可走 (walkalbe) 和不可走 (unwalkable) 。通过计算出从 A 到 B需要走过哪些方格,就找到了路径。一旦路径找到了,人物便从一个方格的中心移动到另一个方格的中心,直至到达目的地。
方格的中心点我们成为“节点 (nodes) ”。如果你读过其他关于 A* 寻路算法的文章,你会发现人们常常都在讨论节点。为什么不直接描述为方格呢?因为我们有可能把搜索区域划为为其他多变形而不是正方形,例如可以是六边形,矩形,甚至可以是任意多变形。而节点可以放在任意多边形里面,可以放在多变形的中心,也可以放在多边形的边上。我们使用这个系统,因为它最简单。
开始搜索(Starting the Search)
一旦我们把搜寻区域简化为一组可以量化的节点后,就像上面做的一样,我们下一步要做的便是查找最短路径。在 A* 中,我们从起点开始,检查其相邻的方格,然后向四周扩展,直至找到目标。
我们这样开始我们的寻路旅途:
从起点 A 开始,并把它就加入到一个由方格组成的 open list( 开放列表 ) 中。这个 open list 有点像是一个购物单。当然现在 open list 里只有一项,它就是起点 A ,后面会慢慢加入更多的项。 Open list 里的格子是路径可能会是沿途经过的,也有可能不经过。基本上 open list 是一个待检查的方格列表。
查看与起点 A 相邻的方格 ( 忽略其中墙壁所占领的方格,河流所占领的方格及其他非法地形占领的方格 ) ,把其中可走的 (walkable) 或可到达的 (reachable) 方格也加入到 open list 中。把起点 A 设置为这些方格的父亲 (parent node 或 parent square) 。当我们在追踪路径时,这些父节点的内容是很重要的。稍后解释。
把 A 从 open list 中移除,加入到 close list( 封闭列表 ) 中, close list 中的每个方格都是现在不需要再关注的。
如下图所示,深绿色的方格为起点,它的外框是亮蓝色,表示该方格被加入到了 close list 。与它相邻的黑色方格是需要被检查的,他们的外框是亮绿色。每个黑方格都有一个灰色的指针指向他们的父节点,这里是起点 A 。
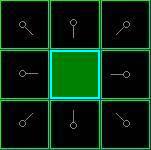
图 2 。
下一步,我们需要从 open list 中选一个与起点 A 相邻的方格,按下面描述的一样或多或少的重复前面的步骤。但是到底选择哪个方格好呢?具有最小 F 值的那个。
路径排序(Path Sorting)
计算出组成路径的方格的关键是下面这个等式:
F = G + H
这里,
G = 从起点 A 移动到指定方格的移动代价,沿着到达该方格而生成的路径。
H = 从指定的方格移动到终点 B 的估算成本。这个通常被称为试探法,有点让人混淆。为什么这么叫呢,因为这是个猜测。直到我们找到了路径我们才会知道真正的距离,因为途中有各种各样的东西 ( 比如墙壁,水等 ) 。本教程将教你一种计算 H 的方法,你也可以在网上找到其他方法。
我们的路径是这么产生的:反复遍历 open list ,选择 F 值最小的方格。这个过程稍后详细描述。我们还是先看看怎么去计算上面的等式。
如上所述, G 是从起点A移动到指定方格的移动代价。在本例中,横向和纵向的移动代价为 10 ,对角线的移动代价为 14 。之所以使用这些数据,是因为实际的对角移动距离是 2 的平方根,或者是近似的 1.414 倍的横向或纵向移动代价。使用 10 和 14 就是为了简单起见。比例是对的,我们避免了开放和小数的计算。这并不是我们没有这个能力或是不喜欢数学。使用这些数字也可以使计算机更快。稍后你便会发现,如果不使用这些技巧,寻路算法将很慢。
既然我们是沿着到达指定方格的路径来计算 G 值,那么计算出该方格的 G 值的方法就是找出其父亲的 G 值,然后按父亲是直线方向还是斜线方向加上 10 或 14 。随着我们离开起点而得到更多的方格,这个方法会变得更加明朗。
有很多方法可以估算 H 值。这里我们使用 Manhattan 方法,计算从当前方格横向或纵向移动到达目标所经过的方格数,忽略对角移动,然后把总数乘以 10 。之所以叫做 Manhattan 方法,是因为这很像统计从一个地点到另一个地点所穿过的街区数,而你不能斜向穿过街区。重要的是,计算 H 是,要忽略路径中的障碍物。这是对剩余距离的估算值,而不是实际值,因此才称为试探法。
把 G 和 H 相加便得到 F 。我们第一步的结果如下图所示。每个方格都标上了 F , G , H 的值,就像起点右边的方格那样,左上角是 F ,左下角是 G ,右下角是 H 。
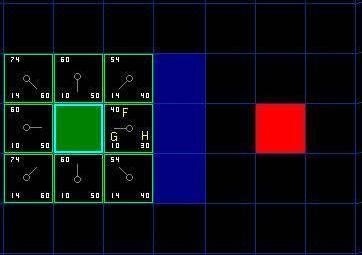
图 3
好,现在让我们看看其中的一些方格。在标有字母的方格, G = 10 。这是因为水平方向从起点到那里只有一个方格的距离。与起点直接相邻的上方,下方,左方的方格的 G 值都是 10 ,对角线的方格 G 值都是 14 。
H 值通过估算起点于终点 ( 红色方格 ) 的 Manhattan 距离得到,仅作横向和纵向移动,并且忽略沿途的墙壁。使用这种方式,起点右边的方格到终点有 3 个方格的距离,因此 H = 30 。这个方格上方的方格到终点有 4 个方格的距离 ( 注意只计算横向和纵向距离 ) ,因此 H = 40 。对于其他的方格,你可以用同样的方法知道 H 值是如何得来的。
每个方格的 F 值,再说一次,直接把 G 值和 H 值相加就可以了。
继续搜索(Continuing the Search)
为了继续搜索,我们从 open list 中选择 F 值最小的 ( 方格 ) 节点,然后对所选择的方格作如下操作:
把它从 open list 里取出,放到 close list 中。
检查所有与它相邻的方格,忽略其中在 close list 中或是不可走 (unwalkable) 的方格 ( 比如墙,水,或是其他非法地形 ) ,如果方格不在open lsit 中,则把它们加入到 open list 中。
把我们选定的方格设置为这些新加入的方格的父亲。
- 如果某个相邻的方格已经在 open list 中,则检查这条路径是否更优,也就是说经由当前方格 ( 我们选中的方格 ) 到达那个方格是否具有更小的 G 值。如果没有,不做任何操作。
相反,如果 G 值更小,则把那个方格的父亲设为当前方格 ( 我们选中的方格 ) ,然后重新计算那个方格的 F 值和 G 值。如果你还是很混淆,请参考下图。
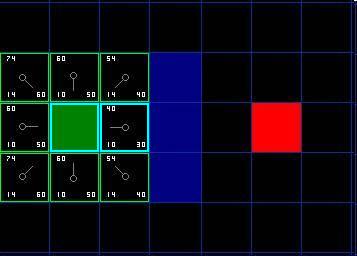
图 4
Ok ,让我们看看它是怎么工作的。在我们最初的 9 个方格中,还有 8 个在 open list 中,起点被放入了 close list 中。在这些方格中,起点右边的格子的 F 值 40 最小,因此我们选择这个方格作为下一个要处理的方格。它的外框用蓝线打亮。
首先,我们把它从 open list 移到 close list 中 ( 这就是为什么用蓝线打亮的原因了 ) 。然后我们检查与它相邻的方格。它右边的方格是墙壁,我们忽略。它左边的方格是起点,在 close list 中,我们也忽略。其他 4 个相邻的方格均在 open list 中,我们需要检查经由这个方格到达那里的路径是否更好,使用 G 值来判定。让我们看看上面的方格。它现在的 G 值为 14 。如果我们经由当前方格到达那里, G 值将会为 20(其中 10 为到达当前方格的 G 值,此外还要加上从当前方格纵向移动到上面方格的 G 值 10) 。显然 20 比 14 大,因此这不是最优的路径。如果你看图你就会明白。直接从起点沿对角线移动到那个方格比先横向移动再纵向移动要好。
当把 4 个已经在 open list 中的相邻方格都检查后,没有发现经由当前方格的更好路径,因此我们不做任何改变。现在我们已经检查了当前方格的所有相邻的方格,并也对他们作了处理,是时候选择下一个待处理的方格了。
因此再次遍历我们的 open list ,现在它只有 7 个方格了,我们需要选择 F 值最小的那个。有趣的是,这次有两个方格的 F 值都 54 ,选哪个呢?没什么关系。从速度上考虑,选择最后加入 open list 的方格更快。这导致了在寻路过程中,当靠近目标时,优先使用新找到的方格的偏好。但是这并不重要。 ( 对相同数据的不同对待,导致两中版本的 A* 找到等长的不同路径 ) 。
我们选择起点右下方的方格,如下图所示。
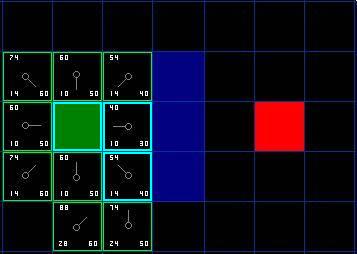
图 5
这次,当我们检查相邻的方格时,我们发现它右边的方格是墙,忽略之。上面的也一样。
我们把墙下面的一格也忽略掉。为什么?因为如果不穿越墙角的话,你不能直接从当前方格移动到那个方格。你需要先往下走,然后再移动到那个方格,这样来绕过墙角。 ( 注意:穿越墙角的规则是可选的,依赖于你的节点是怎么放置的 )
这样还剩下 5 个相邻的方格。当前方格下面的 2 个方格还没有加入 open list ,所以把它们加入,同时把当前方格设为他们的父亲。在剩下的3 个方格中,有 2 个已经在 close list 中 ( 一个是起点,一个是当前方格上面的方格,外框被加亮的 ) ,我们忽略它们。最后一个方格,也就是当前方格左边的方格,我们检查经由当前方格到达那里是否具有更小的 G 值。没有。因此我们准备从 open list 中选择下一个待处理的方格。
不断重复这个过程,直到把终点也加入到了 open list 中,此时如下图所示。
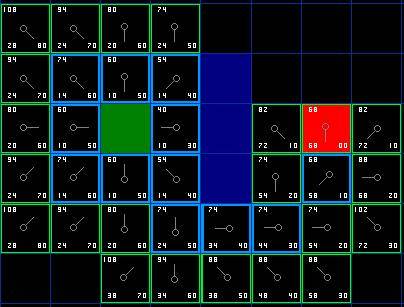
图 6
注意,在起点下面 2 格的方格的父亲已经与前面不同了。之前它的 G 值是 28 并且指向它右上方的方格。现在它的 G 值为 20 ,并且指向它正上方的方格。这在寻路过程中的某处发生,使用新路径时 G 值经过检查并且变得更低,因此父节点被重新设置, G 和 F 值被重新计算。尽管这一变化在本例中并不重要,但是在很多场合中,这种变化会导致寻路结果的巨大变化。
那么我们怎么样去确定实际路径呢?很简单,从终点开始,按着箭头向父节点移动,这样你就被带回到了起点,这就是你的路径。如下图所示。从起点 A 移动到终点 B 就是简单从路径上的一个方格的中心移动到另一个方格的中心,直至目标。就是这么简单!
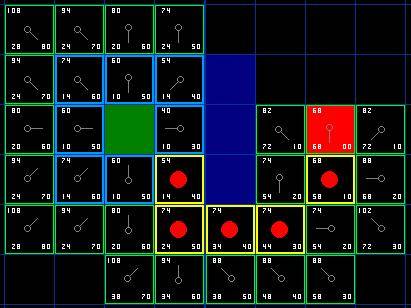
图 7
A*算法总结(Summary of the A* Method)
Ok ,现在你已经看完了整个的介绍,现在我们把所有步骤放在一起:
把起点加入 open list 。
重复如下过程:
a. 遍历 open list ,查找 F 值最小的节点,把它作为当前要处理的节点。
b. 把这个节点移到 close list 。
c. 对当前方格的 8 个相邻方格的每一个方格?
◆ 如果它是不可抵达的或者它在 close list 中,忽略它。否则,做如下操作。
◆ 如果它不在 open list 中,把它加入 open list ,并且把当前方格设置为它的父亲,记录该方格的 F , G 和 H 值。
◆ 如果它已经在 open list 中,检查这条路径 ( 即经由当前方格到达它那里 ) 是否更好,用 G 值作参考。更小的 G 值表示这是更好的路径。如果是这样,把它的父亲设置为当前方格,并重新计算它的 G 和 F 值。如果你的 open list 是按 F 值排序的话,改变后你可能需要重新排序。
d. 停止,当你
◆ 把终点加入到了 open list 中,此时路径已经找到了,或者
◆ 查找终点失败,并且 open list 是空的,此时没有路径。
3.保存路径。从终点开始,每个方格沿着父节点移动直至起点,这就是你的路径。
题外话(Small Rant)
请原谅我的离题,当你在网上或论坛上看到各种关于 A* 算法的讨论时,你偶尔会发现一些 A* 的代码,实际上他们不是。要使用 A* ,你必须包含上面讨论的所有元素 —- 尤其是 open list , close list 和路径代价 G , H 和 F 。也有很多其他的寻路算法,这些算法并不是 A* 算法, A* 被认为是最好的。在本文末尾引用的一些文章中 Bryan Stout 讨论了他们的一部分,包括他们的优缺点。在某些时候你可以二中择一,但你必须明白自己在做什么。
A*算法详解(讲的一级棒 )相关推荐
- Tarjan(塔杨)算法详解
Tarjan算法详解 前言 简介 教学代码-有向图的强联通分量 教学代码-点双联通分量 教学代码-边双联通分量 实战代码-边双 实战代码-点双 前言 Tarjan(塔杨)算法其实不是很复杂,对于图这一 ...
- 寻路算法——A*算法详解并附带实现代码
一.前言 前天看了一篇博客介绍A*算法,按照自己的理解记录一下A*算法. 二.应用场景 一副地图中有坐标A和B,需要找到一条路径(如果有的话)能从A到B,地图中可能有河流或墙壁不能直接穿过,我们需要怎 ...
- FloodFill算法详解及应用
FloodFill算法详解及应用 啥是 FloodFill 算法呢, 最直接的一个应用就是「颜色填充」,就是 Windows 绘画本中那个小油漆桶的标志,可以把一块被圈起来的区域全部染色. 这种算法思 ...
- [Network Architecture]DPN(Dual Path Network)算法详解(转)
https://blog.csdn.net/u014380165/article/details/75676216 论文:Dual Path Networks 论文链接:https://arxiv.o ...
- 多重背包O(N*V)算法详解(——使用单调队列)
多重背包O(N*V)算法详解(--使用单调队列) 多重背包问题: 有N种物品和容量为V的背包,若第i种物品,容量为v[i],价值为w[i],共有n[i]件.怎样装才能使背包内的物品总价值最大? 网上关 ...
- 3. KNN最近邻算法详解与关键技术剖析(理论篇)
一.KNN算法概述 K最近邻(K-Nearest-Neighbour,KNN)算法可以说是最简单的分类算法,易于理解,其核心思想就是距离的比较,即离谁最近,就被归类于谁(群体投票的方式). 通俗解释: ...
- 2. IMU原理及姿态融合算法详解
文章目录 2. IMU原理及姿态融合算法详解 一.组合 二. 原理 a) 陀螺仪 b) 加速度计 c) 磁力计 三. 旋转的表达 a) 欧拉角 b) 旋转矩阵 c) 四元数 d) 李群 SO(3)\t ...
- CORDIC算法详解(一)- CORDIC 算法之圆周系统之旋转模式( Rotation Mode )
版权声明:本文为博主原创文章,遵循 CC 4.0 by-sa 版权协议,转载请附上原文出处链接和本声明. 本文链接:https://blog.csdn.net/Pieces_thinking/arti ...
- 排序算法,最全的10大排序算法详解(Sort Algorithm)
文章目录 排序算法,最全的10大排序算法详解(Sort Algorithm) 排序算法分类 排序算法稳定性 时间复杂度(time complexity) 1#时间复杂度的意义 2#基本操作执行次数 如 ...
- 图解机器学习算法(13) | 聚类算法详解(机器学习通关指南·完结)
作者:韩信子@ShowMeAI 教程地址:https://www.showmeai.tech/tutorials/34 本文地址:https://www.showmeai.tech/article-d ...
最新文章
- 防止重复提交订单-(转)
- Rust基础笔记:Getting input from the console
- visual studio写python_微软发布Visual Studio的Python开发插件
- python操作mysql(四)
- 成功解决torch.cuda.CudaError: CUDA driver version is insufficient for CUDA runtime version (35) [ WARN:0
- Pycharm详细安装教程
- 贝壳如何docker安装openwrt_OpenWrt 中 使用 Docker 安装可道云出错。
- 【CCF】201709-2公共钥匙盒
- ECCV 2020 论文大盘点-视频目标分割篇
- readonly 关键字与 const 关键字不同
- 电话机器人源码可以低成本高效率为OEM代理前景保驾护航
- mysql数据库在哪里写语句_MySQL数据库基本操作以及SQL语句
- ORACLE计算2个时间段相差时间小时、分、秒
- 穿山甲广告切后台点Icon进入后广告消失或游戏重启的解决方法
- 计算机毕业设计Java校园闲置物品交换平台系统(源码+系统+mysql数据库+lw文档
- 优维科技EasyOps6.0升级发布会,全程高能回顾
- 潦草手写体也能轻松识别,快速提取文字不用愁
- centos7双机搭建_CentOS 7 配置 Keepalived 实现双机热备
- 变现利器!一文带你学会应用内添加「贴片广告」
- 虚数到底有什么意义?
热门文章
- linux下eclipse修改tab,eclipse 更改 tab 缩进字符数
- 喵帕斯之传说中的神剑 SDUT
- 低代码开发,推荐一款Web 端自动化神器:Automa!
- A. Parsa‘s Humongous Tree(树形DP + 贪心)
- 三角函数反三角函数乘 [cos(arcsinx)]^2=1-x^2 [sin(arccosx)]^2=1-x^2 sinarctanx=sint=x/√1+x² cosarctanx=1/√1
- 怎么用计算机画图工具,小编教你电脑自带画图软件如何打开
- VVC帧内预测(三)PDPC
- 能力成长模型(转自阿里梁飞老师博客)
- 拼多多获得搜索词推荐 API
- 2007-01-22 日志——让泪化作相思雨