如何用摄像头来测距(opencv)
如何用摄像头来测距(opencv)
作者:郭世龙
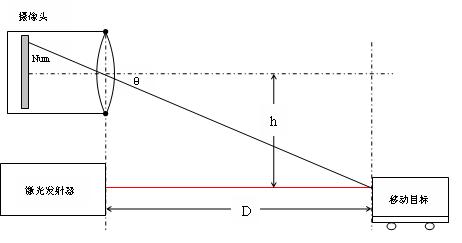
最近一直忙着找工作,blog都长草了,今天把以前作的一个东西放上来充充门面吧。记得在哪看到过老外做的这个东西,觉得很好玩,就自己也做了一个。在摄像头下面固定一个激光笔,就构成了这个简易的测距装置。看一下图吧。


原 理
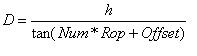
假设激光束是与摄像头的光轴完全平行,激光束的中心落点在在摄像头的视域中是最亮的点。激光束照射到摄像头视域中的跟踪目标上,那么摄像头可以捕捉到这个点,通过简单的图像处理的方法,可以在这侦图像中找到激光束照射形成的最亮点,同时可以计算出Y轴上方向上从落点到图像中心的象素的个数。这个落点越接近图像的中心,被测物体距离机器人就越远。由下图图可以计算距离D:
 (1)
(1)
等式中h是一个常量,是摄像头与激光发射器之间的垂直距离,可以直接测量获得。
 (3)
(3)
{
public:
struct RangeResult * GetRange(IplImage * imgRange,IplImage * imgDst);
LaserRange();
virtual ~LaserRange();
unsigned int maxW;
unsigned int maxH;
unsigned int MaxPixel;
RangeResult * strctResult;
// Values used for calculating range from captured image data
const double gain; // Gain Constant used for converting pixel offset to angle in radians
const double offset; // Offset Constant
const double h_cm; // Distance between center of camera and laser
unsigned int pixels_from_center; // Brightest pixel location from center
};
LaserRange::LaserRange():gain(0.0030354),offset(0),h_cm(4.542)
{
maxW=0;
maxH=0;
MaxPixel=0;
pixels_from_center=0; // Brightest pixel location from center
strctResult->maxCol=0;
strctResult->maxRow=0;
strctResult->maxPixel=0;
strctResult->Range=0.0;
}
{
if(NULL!=strctResult) delete strctResult;
}
{
if(NULL==imgRange) return strctResult;
Preprocess(imgRange,imgDst);
pixels_from_center = abs(120-maxH);
strctResult->Range= h_cm/tan(pixels_from_center * gain + offset);
strctResult->PixfromCent=pixels_from_center;
strctResult->maxCol=maxW;
strctResult->maxRow=maxH;
strctResult->maxPixel=MaxPixel;
//strctResult->Range=0.0;
return strctResult;
}
void LaserRange::Preprocess(void *img, IplImage * imgTemp)
{
MaxPixel=0; //处理下一帧前 最大像素值清零;
IplImage* image = reinterpret_cast<IplImage*>(img);
cvCvtPixToPlane( image,0 ,0 ,imgTemp , 0);
for( int j=((imgTemp->width-60)/2-1); j<(imgTemp->width-40)/2+59; j++)
{
for(int i=5; i<imgTemp->height-5; i++)
{
if((imgTemp->imageData[i*imgTemp->widthStep+j])>MaxPixel)
{
if( ((imgTemp->imageData[(i-1)*imgTemp->widthStep+j])>MaxPixel) && ((imgTemp->imageData[(i-1)*imgTemp->widthStep+j+1])>MaxPixel) &&((imgTemp->imageData[(i-1)*imgTemp->widthStep+j-1])>MaxPixel) )
{
if( ((imgTemp->imageData[(i+1)*imgTemp->widthStep+j])>MaxPixel) && ((imgTemp->imageData[(i+1)*imgTemp->widthStep+j+1])>MaxPixel) &&((imgTemp->imageData[(i+1)*imgTemp->widthStep+j-1])>MaxPixel) )
{
if((imgTemp->imageData[i*(imgTemp->widthStep)+j+1])>MaxPixel)
{
if((imgTemp->imageData[i*(imgTemp->widthStep)+j-1])>MaxPixel)
{
MaxPixel=imgTemp->imageData[i*imgTemp->widthStep+j] ;
maxW=j;
maxH=i;
}
}
}
}
}
}
}
{
// CvCapture* capture = 0;
// capture = cvCaptureFromCAM(0); //0表示设备号
if( !capture )
{
fprintf(stderr,"Could not initialize capturing.../n");
return -1;
}
// cvNamedWindow( "LaserRangeImage", 1 );
// cvvNamedWindow( "image", 1);
cvvNamedWindow( "Dimage", 1);
for(;;)
{
IplImage* frame = 0;
if(isStop) break;
if( !frame )
break;
{
//allocate all the buffers
imgOrign = cvCreateImage( cvGetSize(frame), 8, 3 ); //创建一副图像
imgOrign->origin = frame->origin;
}
//cvShowImage("LaserRangeImage",imgOrign);
if(!imgDest)
{
imgDest=cvCreateImage( cvSize( imgOrign->width,imgOrign->height),8,1);
cvZero( imgDest );
}
struct RangeResult * temp= laservsion.GetRange(imgOrign,imgDest);
cvLine( imgOrign,cvPoint(0,temp->maxRow), cvPoint(imgOrign->width,temp->maxRow),cvScalar(100,100,255,0),1,8,0);
// cvvShowImage( "image", imgOrign);
cvSaveImage("image.bmp", imgOrign);
cvvShowImage( "Dimage", imgDest);
//在PictureBox上显示图片
CDC* pDC = GetDlgItem(IDC_Picture)->GetDC();
CDC dcmemory;
BITMAP bm;
dcmemory.CreateCompatibleDC(pDC);
CBitmap* pBmp;
CString szFileName = "image.bmp";
HBITMAP hBk = (HBITMAP)::LoadImage(NULL,szFileName,IMAGE_BITMAP,0,0,LR_LOADFROMFILE);
if(NULL!=hBk)
{
pBmp=CBitmap::FromHandle(hBk);
pBmp->GetObject(sizeof(BITMAP), &bm);
dcmemory.SelectObject(pBmp);
pDC->BitBlt(0, 0, bm.bmWidth, bm.bmHeight, &dcmemory, 0, 0, SRCCOPY);
char str[80]; // To print message
CDC *pDCp= GetDC();
char str2[80];
// Display frame coordinates as well as calculated range
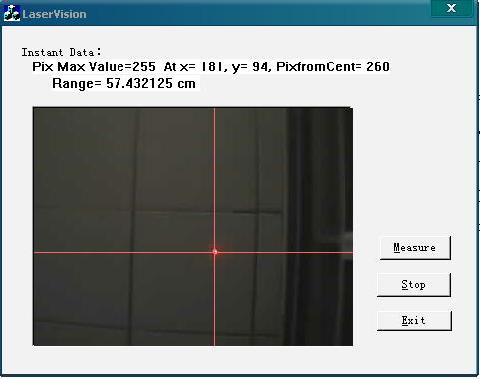
sprintf(str, "Pix Max Value=%d At x= %u, y= %u, PixfromCent= %d",temp->maxPixel,temp->maxCol, temp->maxRow, temp->PixfromCent);
sprintf(str2, "Range= %f cm ",temp->Range);
pDCp->TextOut(30, 33, str);
pDCp->TextOut(50, 50, str2);
ReleaseDC(pDCp);
int c = cvWaitKey(10);
// if( c == 'q' )
// break;
//cvDestroyWindow("LaserRangeImage");
// cvDestroyWindow( "image");
cvDestroyWindow( "Dimage");
return 0;
}
辛苦的工作,快乐的生活
如何用摄像头来测距(opencv)相关推荐
- linux中cv调用摄像头,ubuntu中opencv调用摄像头
ubuntu中opencv调用摄像头 ubuntu中opencv调用摄像头 文章目录 一.Ubuntu中安装opencv 二.关于Linux如何开启摄像头 1.安装VMvareTools,这个是真的强 ...
- 单目摄像头光学图像测距_摄像头与毫米波雷达(Radar)融合解析
01 摄像头和雷达的融合是很多做ADAS当前所关注的关键问题之一.因为单纯摄像头和雷达都无法解决测距问题.不仅在测距,今后可能所应用到的高精度地图也都是需要使用摄像头和雷达的融合才能够实现.当前寻求到 ...
- python 摄像头录视频教程,OpenCV+python调用本地摄像头并录制视频
1.调用摄像头并录制视频 from cv2 import cv2 #捕获摄像头帧 cameraCapture = cv2.VideoCapture(0) fps = 30 size=(int(came ...
- 双目测距代码 python opencv 利用双目摄像头拍照,测距
环境:ubuntu14.04 软件:opencv3.3 +pycharm 好久没有写博客了,手都感觉好生疏,最近一直在研究工控机,水下机器人等,好不容易闲下来,没办法呀,继续前行吧,前面一直说双目测距 ...
- python手机摄像头投测距_python opencv单目测距 小孔成像原理
python opencv单目测距 小孔成像原理 小孔成像原理 一 用相似三角形计算物体或者目标到相机的距离 我们将使用相似三角形来计算相机到一个已知的物体或者目标的距离. 相似三角形就是这么一回事: ...
- opencv java 摄像头_使用OpenCV Java创建Windows摄像头扫码程序
OpenCV提供了一些基本的Webcam控制接口.用OpenCV C/C++或者Python,可以在任意平台快速创建一个摄像头预览应用.然而使用Java,情况就复杂的多,因为OpenCV Java并没 ...
- python控制摄像头拍照_python+opencv+pyqt5控制摄像头在Qlabel上显示
import cv2 import numpy as numpy from PIL import * import sys from PyQt5.QtWidgets import * from PyQ ...
- 单目摄像头光学图像测距_自动驾驶汽车传感器技术解析——车载摄像头
智能驾驶汽车之眼 车载摄像头是实现众多预警.识别类ADAS功能的基础.在众多ADAS功能中,视觉影像处理系统较为基础,而摄像头又是视觉影像处理系统的输入,因此车载摄像头对于智能驾驶必不可少. 摄像头可 ...
- 单目摄像头光学图像测距_挑战激光雷达,MAXIEYE要重新定义单目摄像头?
自动驾驶的"唯激光雷达论"正在受到冲击. 前不久恩智浦的全球CTO Lars Reger在接受媒体采访时表示:目前激光雷达技术还无法超过传统雷达加摄像头最新技术的性能.5-8年后摄 ...
最新文章
- Python中处理时间 —— time模块
- 如何使用Fiddler抓包操作?
- opencv-python图像处理之让你的照片变旧
- CUDA 4.0真技术解析
- 以HANA为核心 SAP实时数据平台详解
- 坐标变换过程(vertex transformation)
- springdatajpa命名规则_Spring Boot 之Spring data JPA简介
- mysql 在查询语句返回的列中包含一列表示该条记录在整个结果集中的行号
- 计算机网络技术实训课程报告,大学网络技术基础课程的实训报告怎么写?
- MyBatis 自定义插件
- 【mysql】大小写规范
- web网站加速之CDN技术原理
- 数据分析工程师_第02讲Pandas教程(上篇)
- Python中find_elements以及presence_of_element_located的用法
- 2020年12月计算机一级考试,5省市已公布2020年12月计算机等级考试时间,切勿错过!...
- 为什么说大数据一定会从ABC里最先掉队
- sql server 数据库正在使用该文件的解决办法
- 说给昨天的今天的明天的我们自己
- Win7电脑开机无法进入系统的解决方法
- RabbitMQ如何防止消息丢失及重复消费