基于HTML5的WebGL呈现A星算法的3D可视化
http://www.hightopo.com/demo/astar/astar.html
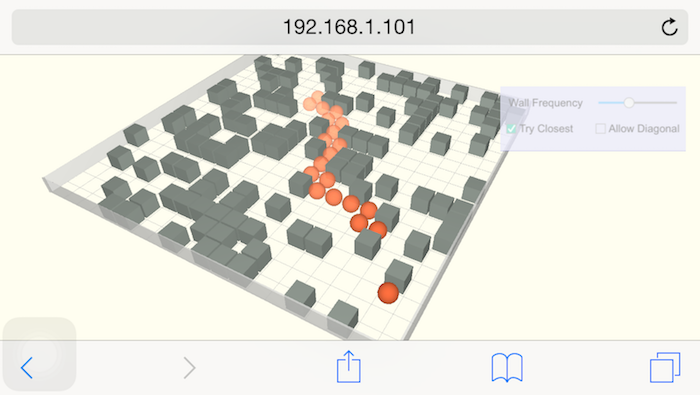
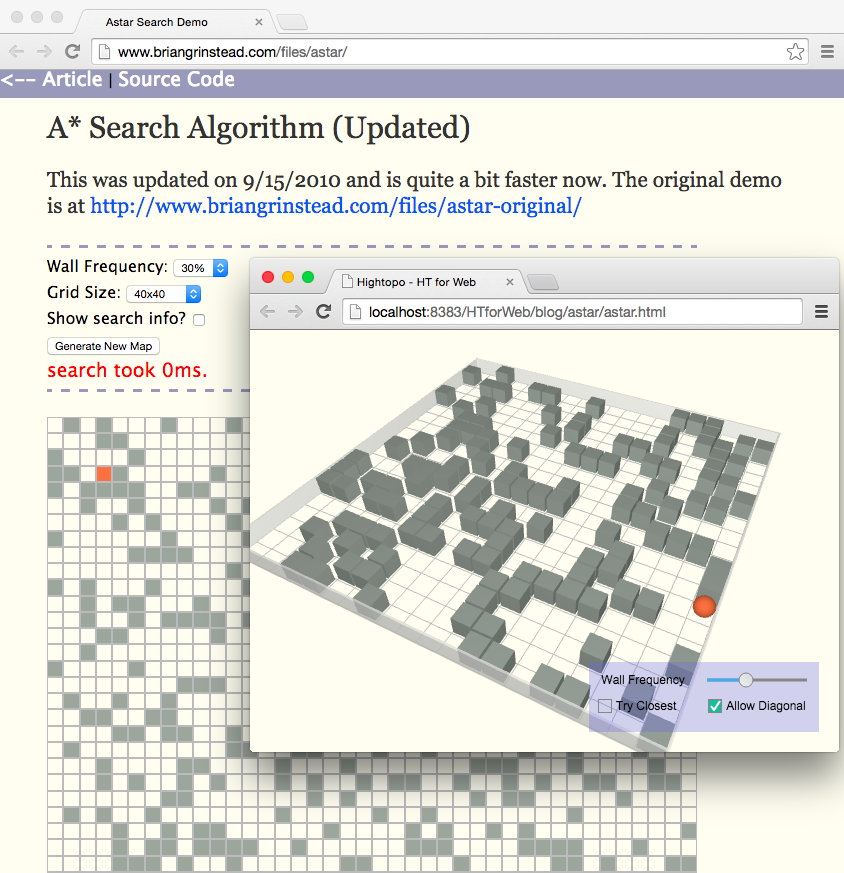
最近搞个游戏遇到最短路径的常规游戏问题,一时起兴基于HT for Web写了个A*算法的WebGL 3D呈现,算法基于开源 https://github.com/bgrins/javascript-astar 的javascript实现,其实作者也有个不错的2D例子实现 http://www.briangrinstead.com/files/astar/ ,只不过觉得所有A*算法的可视化实现都是平面的不够酷,另外还有不少参数需要调节控制,还是值得好好搞个全面的Demo,先上张2D和3D例子的对照图。
实现代码比较容易一百多行,不过算法核心在astar.js了,界面核心在ht.js里面了,我只需要构建网格信息,只需监听用户点击,然后调用astar.js进行最短路径计算,将结果通过动画的方式呈现出走动的过程,所有代码如下:
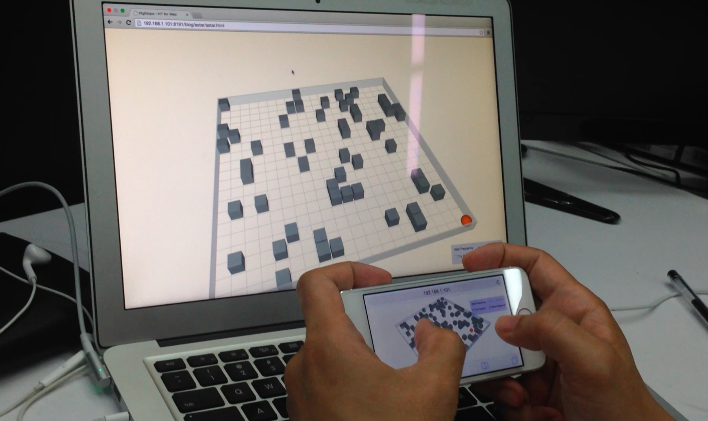
function init() { w = 40; m = 20; d = w * m / 2; gridRows = []; dm = new ht.DataModel(); g3d = new ht.graph3d.Graph3dView(dm); g3d.setGridVisible(true); g3d.setGridColor('#BBBBBB'); g3d.setGridSize(m); g3d.setGridGap(w); g3d.addToDOM(); g3d.sm().setSelectionMode('none'); anim = startBall = endBall = null; g3d.getView().addEventListener(ht.Default.isTouchable ? 'touchstart' : 'mousedown', function(e){ if(!anim){ var p = g3d.getHitPosition(e); var x = Math.floor((p[0] + d)/ w); var y = Math.floor((p[2] + d)/ w); var endBall = dm.getDataByTag("cell_" + x + "_" + y); if(endBall && endBall.s('batch') !== 'wall'){ if(startBall.a('x') === x && startBall.a('y') === y){ return; } var g = new Graph(gridRows, { diagonal: formPane.v('diagonal') }); var start = g.grid[startBall.a('x')][startBall.a('y')]; var end = g.grid[x][y]; var result = astar.search(g, start, end, { closest: formPane.v('closest') }); if(!result.length){ return; } x = result[result.length-1].x; y = result[result.length-1].y; endBall = dm.getDataByTag("cell_" + x + "_" + y); endBall.s('3d.visible', true); startBall.s('3d.visible', false); formPane.setDisabled(true); anim = ht.Default.startAnim({ duration: 700, finishFunc: function(){ for(var i=0; i<result.length; i++){ var ball = dm.getDataByTag("cell_" + result[i].x + "_" + result[i].y); ball.s({ '3d.visible': false, 'shape3d.opacity': 1, 'shape3d.transparent': false }); startBall.p3(-d+w*x+w/2, w/2, -d+w*y+w/2); startBall.a({x: x, y: y}); startBall.s('3d.visible', true); } anim = null; formPane.setDisabled(false); }, action: function(v){ var index = Math.round(v*result.length); for(var i=0; i<index; i++){ var ball = dm.getDataByTag("cell_" + result[i].x + "_" + result[i].y); ball.s({ '3d.visible': true, 'shape3d.opacity': i/index*0.3 + 0.7, 'shape3d.transparent': true }); } } }); } } }, false); createFormPane(); createGrid(); } function createGrid(){ dm.clear(); var ball; gridRows.length = 0; for(var x = 0; x < m; x++) { var nodeRow = []; gridRows.push(nodeRow); for(var y = 0; y < m; y++) { var isWall = Math.floor(Math.random()*(1/formPane.v('frequency'))); if(isWall === 0){ nodeRow.push(0); createNode(x, y).s({ 'batch': 'wall', 'all.color': '#9CA69D' }); }else{ nodeRow.push(1); ball = createNode(x, y).s({ 'shape3d': 'sphere', 'shape3d.color': '#FF703F', '3d.visible': false }); } } } if(!ball){ createGrid(); return; } startBall = createNode(ball.a('x'), ball.a('y'), 'start').s({ 'shape3d': 'sphere', 'shape3d.color': '#FF703F' }); shape = new ht.Shape(); shape.setPoints(new ht.List([ {x: -d, y: d}, {x: d, y: d}, {x: d, y: -d}, {x: -d, y: -d}, {x: -d, y: d} ])); shape.setThickness(4); shape.setTall(w); shape.setElevation(w/2); shape.setClosePath(true); shape.s({ 'all.color': 'rgba(187, 187, 187, 0.8)', 'all.transparent': true, 'all.reverse.cull': true }); dm.add(shape); } function createNode(x, y, tag){ var node = new ht.Node(); tag = tag || "cell_" + x + "_" + y; node.setTag(tag); node.a({ x: x, y: y }); node.s3(w*0.9, w*0.9, w*0.9); node.p3(-d+w*x+w/2, w/2, -d+w*y+w/2); node.s({ 'all.reverse.cull': true, 'shape3d.reverse.cull': true }); dm.add(node); return node; } function createFormPane() { formPane = new ht.widget.FormPane(); formPane.setWidth(230); formPane.setHeight(70); formPane.getView().className = 'formpane'; document.body.appendChild(formPane.getView()); formPane.addRow(['Wall Frequency', { id: 'frequency', slider: { min: 0, max: 0.8, value: 0.1, onValueChanged: function(){ createGrid(); } } }], [100, 0.1]); formPane.addRow([ { id: 'closest', checkBox: { label: 'Try Closest' } }, { id: 'diagonal', checkBox: { label: 'Allow Diagonal' } } ], [0.1, 0.1]); }只从iOS8支持WebGL后在移动终端上测试3D应用比当前的大部分Android平板舒服多了,以上的例子在iOS系统下呈现和算法都挺流畅,http://v.youku.com/v_show/id_XODMzOTU1Njcy.html,当然这个小例子数据量也不大,本质其实还是2D的最短路径算法,并非真正意义的3D空间最短路径,但还是足够解决很多实际应用问题了。
http://www.hightopo.com/demo/astar/astar.html
转载于:https://www.cnblogs.com/xhload3d/p/4973251.html
基于HTML5的WebGL呈现A星算法的3D可视化相关推荐
- 基于 HTML5 的 WebGL 自定义 3D 摄像头监控模型
2019独角兽企业重金招聘Python工程师标准>>> 前言 随着视频监控联网系统的不断普及和发展, 网络摄像机更多的应用于监控系统中,尤其是高清时代的来临,更加快了网络摄像机的发展 ...
- html5做一个展示页面,基于HTML5的WebGL实现json和echarts图表展现在同一个界面
突然有个想法,如果能把一些用到不同的知识点放到同一个界面上,并且放到一个盒子里,这样我如果要看什么东西就可以很直接显示出来,而且这个盒子一定要能打开.我用HT实现了我的想法,代码一百多行,这么少的代码 ...
- 基于html5的矢量图绘制方法研究,基于HTML5和WebGL的三维地形可视化方法研究
摘要: 近年来地理信息的需求急速增长,越来越多的GIS应用走向网页化.移动化.WebGIS应用也在逐渐从二维层面向三维层面发展,三维地形可视化是三维GIS的基础,基于Web的三维地形可视化也成为新的研 ...
- 基于 HTML5 的 WebGL 3D 档案馆可视化管理系统
2019独角兽企业重金招聘Python工程师标准>>> 前言 档案管理系统是通过建立统一的标准以规范整个文件管理,包括规范各业务系统的文件管理的完整的档案资源信息共享服务平台,主要实 ...
- 基于HTML5的WebGL电信网管3D机房监控应用
先上段视频,不是在玩游戏哦,是规规矩矩的电信网管企业应用,嗯,全键盘的漫游3D机房: 随着PC端支持HTML5浏览器的普及,加上主流移动终端Android和iOS都已支持HTML5技术,新一代的电 ...
- 基于HTML5的WebGL结合Box2DJS物理应用
上篇我们基于HT for Web呈现了A* Search Algorithm的3D寻路效果,这篇我们将采用HT for Web 3D来呈现Box2DJS物理引擎的碰撞效果,同上篇其实Box2DJS只是 ...
- 基于HTML5的WebGL结合Box2DJS物理引擎应用
上篇我们基于HT for Web呈现了A* Search Algorithm的3D寻路效果,这篇我们将采用HT for Web 3D来呈现Box2DJS物理引擎的碰撞效果,同上篇其实Box2DJS只是 ...
- 基于HTML5的WebGL实现的2D3D迷宫小游戏
为了实现一个基于HTML5的场景小游戏,我采用了HT for Web来实现,短短200行代码,我就能实现用"第一人称"来操作前进后退上下左右,并且实现了碰撞检测. 先来看下实现的效 ...
- 基于HTML5的WebGL结合Box2DJS物理应用 1
上篇我们基于HT for Web呈现了A* Search Algorithm的3D寻路效果,这篇我们将采用HT for Web 3D来呈现Box2DJS物理引擎的碰撞效果,同上篇其实Box2DJS只是 ...
最新文章
- 机房收费系统【VB版】——选择下机
- 我的一些小想法(聊以一笑……)
- 蓝色三角_梅山!长三角唯一近海蓝色海湾成网红打卡地
- C# 调用C++写的dll的实现方法
- 2019(dotNet全栈开发)公众号回顾
- 【渝粤题库】国家开放大学2021春2704植物学基础题目
- 【LeetCode笔记】112 113. 路径总和 I II(Java、递归、DFS)
- 使用spyder编译器单步调试python
- 创造型模式-生成器模式
- Spring的数据库编程浅入浅出——不吹牛逼不装逼
- camunda 流程执行追踪_从Activiti分裂而来的camunda BPM
- 操作系统就是虚拟机--主内又主外
- 一个机器人位于一个 m x n 网格的左上角,机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角。问总共有多少条不同的路?
- 今年的WWDC,真的很难说
- java 格林尼治生僻时间转换
- 微博立场检测 60分Baseline
- fairseq入门教程
- 什么是骨传导耳机,骨传导耳机有什么优缺点
- 110配线架打法图解_【布线经验】110语音配线架详细安装教程(图文)
- 【魔方攻略】五魔方教程(原创)