运动控制卡应用开发教程之Python
众所周知,Python作为一门面向对象的新兴开发语言,具有完善的基础代码库,实用性与代码可读性强,被越来越多的人应用于智能装备的运动控制。
今天正运动技术与大家分享一下运动控制卡应用开发教程之Python。
在正式学习之前,我们先了解一下正运动技术的运动控制卡ECI2418和ECI2618。这两款产品分别是4轴,6轴运动控制卡。

ECI2418支持4轴脉冲输入与编码器反馈,板载24点输入,16点输出,2AD,2DA,支持手轮接口,其中特定输出支持高速PWM控制。

ECI2618支持6轴脉冲输入与编码器反馈,板载24点输入,16点输出,2AD,2DA,支持手轮接口,其中特定输出支持高速PWM控制。

ECI2418,ECI2618均使用同一套API函数,均支持C、C++、C#、LabView、Python、Delphi等开发语言,支持VC6.0、VB6.0、Qt、.Net等平台,支持Windows、Linux、WinCE、iMac等操作系统。
以下是Python语言的开发流程。
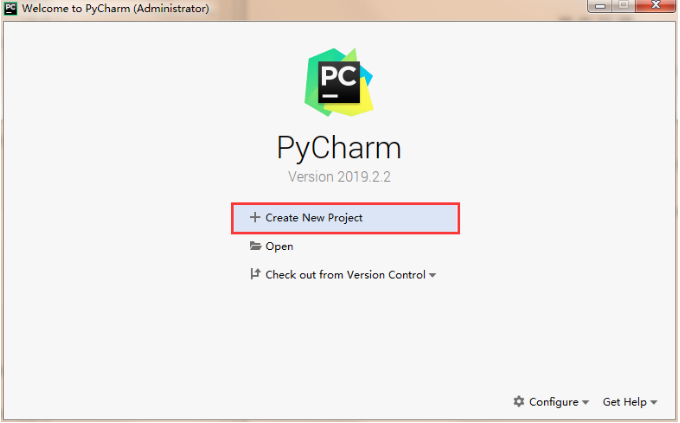
1、新建项目。
打开Pycharm软件进行操作,点击Create New Project新建项目。
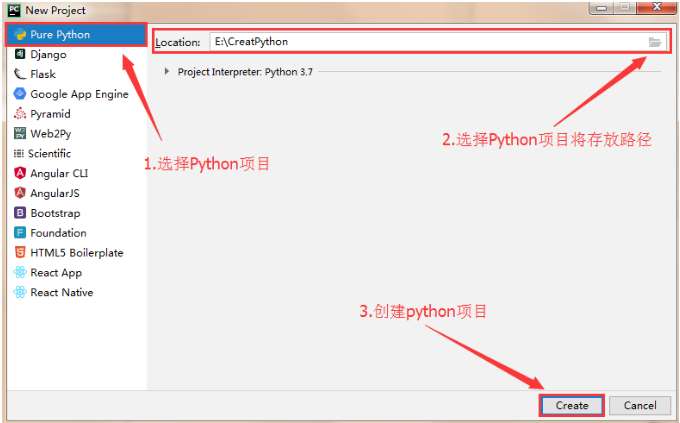
2、设置Python项目存放路径。
此过程主要包含三步:
选择Python项目→选择Python项目将存放的路径→创建Python项目。
3、新建Python文件。
在Python项目中新建Python文件,右键CratPython文件夹,选择“New→PythonFile”,创建新的Python 文件。
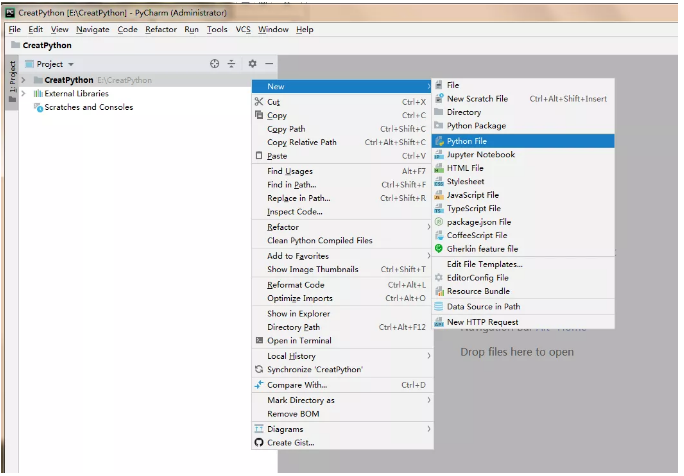
选择“New→Python File”
创建新的Python 文件
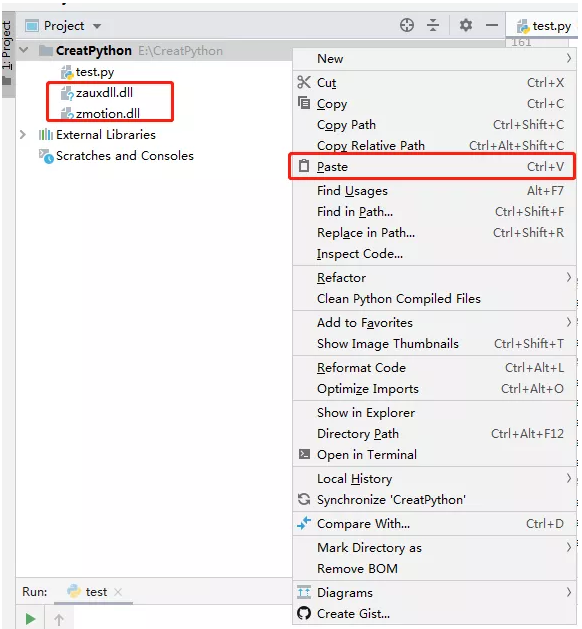
4、将Python动态库复制到Python项目中。
5、模块导入并加载动态链接库。
首先把Python中的两个模块导入(platform和ctypes模块),其中ctypes模块提供和C语言兼容的数据类型,能够很方便地调用动态链接库中输出的C接口函数。
importplatform
import ctypes
#运行环境判断
systype = platform.system()
ifsystype == 'Windows':
ifplatform.architecture()[0] == '64bit':
zauxdll = ctypes.WinDLL( './zauxdll64.dll')
print( 'Windows x64')
else:
zauxdll = ctypes.WinDLL( './zauxdll.dll')
print( 'Windows x86')
elifsystype == 'Darwin':
zmcdll = ctypes.CDLL( './zmotion.dylib')
print( "macOS")
elif systype == 'Linux':
zmcdll = ctypes.CDLL( './libzmotion.so')
print( "Linux")
else:
print( "Not Supported!!")
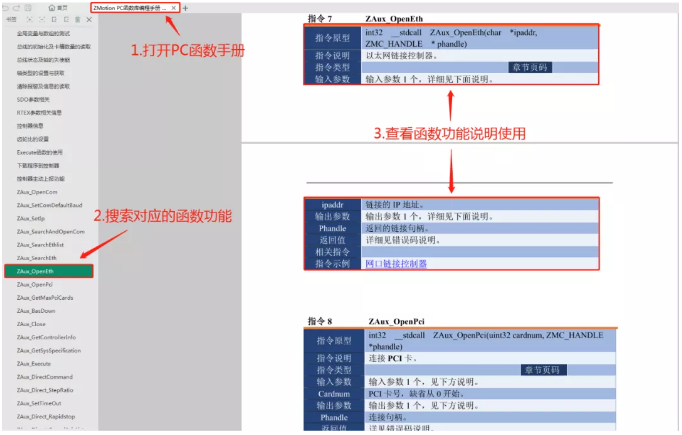
6、通过加载导入的动态库链接库,调用ZMotion PC函数手册中的函数。
1)使用操作。
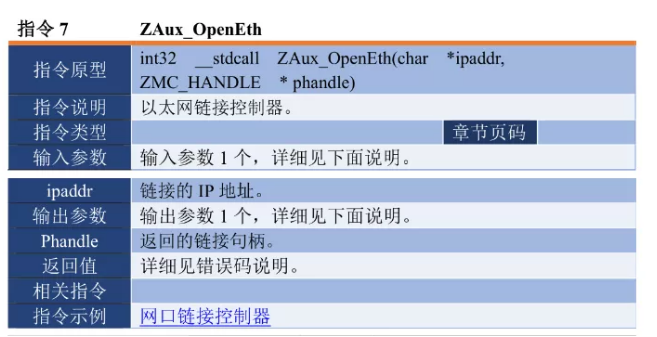
首先根据控制器连接方式用连接函数连接控制器,输出控制器句柄,利用控制器的句柄我们就可以对库函数进行操作。
即“打开PC函数手册→搜索想要的函数功能→查看函数说明→通过刚才加载的动态链接库返回的zauxdll对象进行调用”。
2)通过ip连接函数接口返回的控制器句柄handle,对控制器的句柄handle操作。
#####控制器连接#####
def connect(self, ip, console=[]):
ifself.handle.value is not None:
self.disconnect()
ip_bytes = ip.encode( 'utf-8')
p_ip = ctypes.c_char_p(ip_bytes)
print( "Connecting to", ip, "...")
ret = zauxdll.ZAux_OpenEth(p_ip, ctypes.pointer(self.handle))
msg = "Connected"
ifret == 0:
msg = ip + " Connected"
self.sys_ip = ip
self.is_connected = True
else:
msg = "Connection Failed, Error " + str(ret)
self.is_connected = False
console.append(msg)
console.append(self.sys_info)
returnret
# 断开连接
def disconnect(self):
ret = zauxdll.ZAux_Close(self.handle)
self.is_connected = False
return ret
3)轴参数设置。
#####轴参数设置####
# 设置轴类型
def set_atype(self, iaxis, iValue):
ret = zauxdll.ZAux_Direct_SetAtype(self.handle, iaxis, iValue)
ifret == 0:
print( "Set Axis (", iaxis, ") Atype:", iValue)
else:
print( "Set Axis (", iaxis, ") Atype fail!")
returnret
# 设置脉冲当量
def set_units(self, iaxis, iValue):
ret = zauxdll.ZAux_Direct_SetUnits(self.handle, iaxis, ctypes.c_float(iValue))
if ret == 0:
print( "Set Axis (", iaxis, ") Units:", iValue)
else:
print( "Set Axis (", iaxis, ") Units fail!")
returnret
# 设置轴加速度
def set_accel(self, iaxis, iValue):
ret = zauxdll.ZAux_Direct_SetAccel(self.handle, iaxis, ctypes.c_float(iValue))
ifret == 0:
print( "Set Axis (", iaxis, ") Accel:", iValue)
else:
print( "Set Accel (", iaxis, ") Accel fail!")
returnret
# 设置轴减速度
def set_decel(self, iaxis, iValue):
ret = zauxdll.ZAux_Direct_SetDecel(self.handle, iaxis, ctypes.c_float(iValue))
ifret == 0:
print( "Set Axis (", iaxis, ") Decel:", iValue)
else:
print( "Set Axis (", iaxis, ") Decel fail!")
returnret
# 设置轴运行速度
def set_speed(self, iaxis, iValue):
ret = zauxdll.ZAux_Direct_SetAccel(self.handle, iaxis, ctypes.c_float(iValue))
ifret == 0:
print( "Set Axis (", iaxis, ") Speed:", iValue)
else:
print( "Set Axis (", iaxis, ") Speed fail!")
returnret
4)轴参数读取。
#####轴参数读取####
# 读取轴类型
def get_atype(self, iaxis):
iValue = (ctypes.c_int)()
ret = zauxdll.ZAux_Direct_GetAtype(self.handle, iaxis, ctypes.byref(iValue))
ifret == 0:
print( "Get Axis (", iaxis, ") Atype:", iValue.value)
else:
print( "Get Axis (", iaxis, ") Atype fail!")
return ret
# 读取轴脉冲当量
def get_units(self, iaxis):
iValue = (ctypes.c_float)()
ret = zauxdll.ZAux_Direct_GetUnits(self.handle, iaxis, ctypes.byref(iValue))
if ret == 0:
print( "Get Axis (", iaxis, ") Units:", iValue.value)
else:
print( "Get Axis (", iaxis, ") Units fail!")
returnret
# 读取轴加速度
def get_accel(self, iaxis):
iValue = (ctypes.c_float)()
ret = zauxdll.ZAux_Direct_GetAccel(self.handle, iaxis, ctypes.byref(iValue))
ifret == 0:
print( "Get Axis (", iaxis, ") Accel:", iValue.value)
else:
print( "Get Axis (", iaxis, ") Accel fail!")
returnret
# 读取轴减速度
def get_decel(self, iaxis):
iValue = (ctypes.c_float)()
ret = zauxdll.ZAux_Direct_GetDecel(self.handle, iaxis, ctypes.byref(iValue))
if ret == 0:
print( "Get Axis (", iaxis, ") Decel:", iValue.value)
else:
print( "Get Axis (", iaxis, ") Decel fail!")
returnret
# 读取轴运行速度
def get_speed(self, iaxis):
iValue = (ctypes.c_float)()
ret = zauxdll.ZAux_Direct_GetSpeed(self.handle, iaxis, ctypes.byref(iValue))
ifret == 0:
print( "Get Axis (", iaxis, ") Speed:", iValue.value)
else:
print( "Get Axis (", iaxis, ") Speed fail!")
returnret
5)单轴运动。
#####运动调用####
# 直线运动
def move(self, iaxis, iValue):
ret = zauxdll.ZAux_Direct_Single_Move(self.handle, iaxis, iValue)
ifret == 0:
print( "Axis (", iaxis, ") Move:",iValue)
else:
print( "Axis (", iaxis, ") Move Fail")
returnret
6)运行程序,输出结果。
调用封装好的函数→运行→输出程序运行结果。
#####功能使用####
zaux = ZMCWrapper()
# 连接控制器ip 默认192.168.0.11
zaux.connect( "192.168.0.11")
# 设置轴0参数
zaux.set_atype(0, 1)
zaux.set_units(0, 100)
zaux.set_accel(0, 1000)
zaux.set_decel(0, 1000)
zaux.set_speed(0, 1000)
# 获取轴0参数
zaux.get_atype(0)
zaux.get_units(0)
zaux.get_accel(0)
zaux.get_decel(0)
zaux.get_speed(0)
# 运动
zaux.move(0, 100) # 轴0直线运动移动100
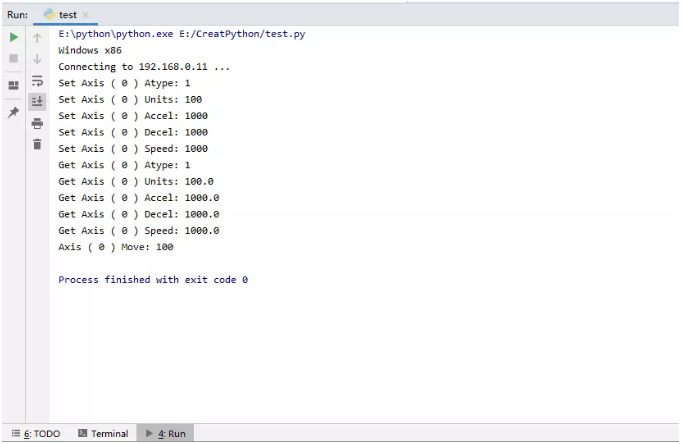
运行并输出程序运行结果
正运动技术运动控制卡应用开发教程之Python就分享到这里,更多精彩内容,请关注我们的公众号。
本文由正运动小助手原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。
运动控制卡应用开发教程之Python相关推荐
- wince 开发_正运动技术运动控制卡应用开发教程之Python
众所周知,Python作为一门面向对象的新兴开发语言,具有完善的基础代码库,实用性与代码可读性强,被越来越多的人应用于智能装备的运动控制. 今天正运动技术与大家分享一下运动控制卡应用开发教程之Pyth ...
- EtherCAT运动控制卡开发教程之python
众所周知,Python作为一门面向对象的新兴开发语言,具有非常完善的基础代码库,更注重实用,同时代码可读极强,编写完程序即可直接运行,被越来越多的人广泛将它用于机器视觉和自动化控制. 今天正运动技术与 ...
- python 运动控制卡_运动控制卡应用开发教程之Linux
今天,正运动技术为大家分享一下运动控制卡应用开发教程之Linux.我们将从新建Qt项目,添加函数库讲起,再详细讲解函数的用法,最后通过一个连续插补例程讲解来了解项目实操. 在正式学习之前,我们先了解一 ...
- 运动控制卡的函数库与Linux,运动控制卡应用开发教程之ROS(下)
在正式学习之前,我们先了解一下正运动技术的运动控制卡ECI2418和ECI2618.这两款产品分别是4轴,6轴运动控制卡. ECI2418支持4轴脉冲输入与编码器反馈,板载24点输入,16点输出,2A ...
- 运动控制卡应用开发教程之VC6.0
今天,我们来讲解一下正运动技术运动控制卡应用开发教程之VC6.0. 在正式学习之前,我们先了解一下正运动技术的运动控制卡ECI2418和ECI2618.这两款产品分别是4轴,6轴运动控制卡. ECI2 ...
- 运动控制卡应用开发教程之LabVIEW
今天,我们来讲解一下正运动技术运动控制卡应用开发教程之LabVIEW. 在正式学习之前,我们先了解一下正运动技术的运动控制卡ECI2418和ECI2618.这两款产品分别是4轴,6轴运动控制卡. EC ...
- 运动控制卡应用开发教程之MATLAB
今天,正运动小助手给大家分享一下运动控制卡应用开发教程之MATLAB. 一 ECI2828硬件介绍 ECI2828系列运动控制卡支持多达16 轴直线插补.任意圆弧插补.空间圆弧.螺旋插补.电子凸轮. ...
- Linux qt 运动控制卡,运动控制卡应用开发教程之VB6.0
我们主要从VB6.0的项目新建.函数库引用和PC函数使用方面讲起,最后通过项目实战--总线初始化例程讲解,来让大家熟悉它的项目开发. 在正式学习之前,我们先了解一下正运动技术的运动控制卡ECI2418 ...
- 运动控制卡应用开发教程之C++
今天,正运动技术为大家分享一下应用C++开发一个多段连续插补的运动控制应用. 我们主要从新建MFC项目,添加函数库讲起,再了解PC函数用法,最后通过项目实战--连续插补运动例程讲解,来让大家熟悉C++ ...
- 运动控制卡应用开发教程之VB6.0
今天,正运动小助手为大家分析一下应用VB6.0开发一个总线初始化的运动控制应用. 我们主要从VB6.0的项目新建.函数库引用和PC函数使用方面讲起,最后通过项目实战--总线初始化例程讲解,来让大家熟悉 ...
最新文章
- mac下安装libpng环境
- mysql的基本知识
- android--创建自己的内容提供器
- 【python数据挖掘课程】二十二.Basemap地图包安装入门及基础知识讲解
- matlab错误使用assert,关于异常处理:何时在Matlab中使用assert()?
- 适合Web服务器的iptables规则
- java jpanel 叠加_java – 如何在JPanel上叠加,调整大小和居中组件?
- 吴恩达机器学习训练2:Logistic回归
- python之event【事件】
- python求5_Python 5 运算符
- io 流 txt本地生成
- Elasticsearch 7.x Nested 嵌套类型查询 | ES 干货
- macOS -- 如何通过终端开启/关闭SSH
- 益智类游戏关卡设计:逆推法--巧解益智类游戏关卡设计
- 《纽约时报》畅销书作家发布新的COVID安全旅行提示电子书
- salt 安装kubernetes集群3节点
- 三向振动台的计算机辅助测试实验分析原因,振动试验原理及试验考虑的条件
- wps折线图如何画多条折线_怎么用wps制作折线图 wps制作多条折线图的步骤方法...
- 基于Qt的网络五子棋游戏对战
- 计算机管理映像路径,windows任务管理器显示映像路径和命令行设置参考
热门文章
- 8086汇编语言(一) 汇编语言源程序
- 数据、数据库、数据库管理系统,数据库系统的概念
- 火力发电行业三大知识图谱应用场景,助力火力发电厂清洁高效智慧化运营
- php递归返回值只有第一次的结果,php递归函数出现返回值问题的解决
- Unable to find setter method for attribute: [commandName]
- fastboot模式下无法找到设备,不能使用fastboot命令,需要安装驱动
- 基础学习日志 ━━ 变量、函数、类命名时常用的英文词汇
- Linux系统死亡之ping,linux下防止syn***,端口扫描和死亡之ping
- 获取JSON文本(复嵌对象)转换指定JSON数据并Ajax实现数据初始可视化【附上echarts地图官方数据形式json文件数据】
- javaweb小区物业管理系统设计与实现(毕业论文+程序设计+数据库文件)