使用MPU6050陀螺仪自制Arduino数字量角器
MPU6050惯性单元是一个3轴加速度计和一个3轴陀螺仪组合的单元。它还包含温度传感器和DCM,可执行复杂的任务。 MPU6050通常用于制作无人机和其他远程控制机器人,如自平衡机器人。在本篇文章中,我们将使用MPU6050和Arduino开发板制作一款数字量角器。本文使用伺服电机在量角器上显示角度。伺服电机轴安装有指针,该指针可以在量角器上旋转,以指示角度,同时该角度值也显示在1602液晶显示屏上。在开始制作之前,让我们先了解陀螺仪传感器。
什么是加速度计和陀螺仪传感器?
加速度计用于测量加速度。它实际上可以感知到静态和动态加速度。例如,移动电话使用加速计传感器来感知移动设备处于横向模式或纵向模式。
陀螺仪用于测量角速度,该角速度使用地球的重力来确定运动中物体的方向。角速度是旋转体的角位置的变化率。
例如,今天的手机使用陀螺仪传感器根据手机的方向来玩手机游戏。此外,VR耳机使用陀螺仪传感器以360度方向观看。
因此,虽然加速度计可以测量线性加速度,但陀螺仪可以帮助找到旋转加速度。当将两个传感器用作单独的模块时,很难找到方向、位置和速度。但是通过组合这两个传感器,它可以作为惯性测量单元(IMU)。因此,在MPU6050模块中,加速度计和陀螺仪存在于单个PCB上,以找到方向、位置和速度。
常见的应用:
◾ 用于无人机的方向控制
◾ 自平衡机器人
◾ 机器人手臂控制
◾ 倾斜传感器
◾ 用于手机、视频游戏机
◾ 人形机器人
◾ 用于飞机、汽车等
MPU6050加速度计和陀螺仪传感器模块
MPU6050是一种微电子机械系统(MEMS),由3轴加速度计和3轴陀螺仪组成。它还有温度传感器。
它可以测量:
◾ 加速度
◾ 速度
◾ 方向
◾ 移位
◾ 温度
该模块内部还有一个(DMP)数字运动处理器,功能强大,可以执行复杂的计算,从而腾出微控制器的工作空间。
该模块还有两个辅助引脚,可用于连接外部IIC模块,如磁力计。由于模块的IIC地址是可配置的,因此可以使用AD0引脚将多个MPU6050传感器连接到微控制器。
功能和规格:
◾ 电源:3-5V
◾ 通信:I2C协议
◾ 内置16位ADC提供高精度
◾ 内置DMP提供高计算能力
◾ 可用于与磁力计等其他IIC设备连接
◾ 可配置的IIC地址
◾ 内置温度传感器
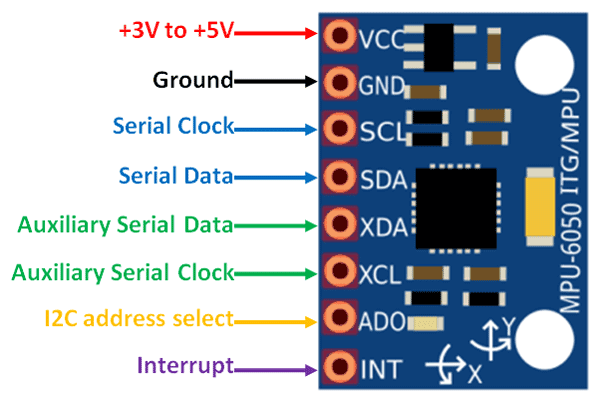
MPU6050的引脚说明:
|
引脚编号
|
引脚名称
|
引脚说明
|
| 1 | Vcc | 为模块供电,可以+3V至+5V。通常使用+5V |
| 2 | Ground | 连接到系统的接地 |
| 3 | Serial Clock (SCL) | 用于为I2C通信提供时钟脉冲 |
| 4 | Serial Data (SDA) | 用于通过I2C通信传输数据 |
| 5 | Auxiliary Serial Data (XDA) | 可用于将其他I2C模块与MPU6050连接。可选。 |
| 6 | Auxiliary Serial Clock (XCL) | 可用于将其他I2C模块与MPU6050连接。可选。 |
| 7 | AD0 | 如果MCU使用多个MPU6050,该引脚可用于更改地址 |
| 8 | Interrupt (INT) |
使用MPU6050陀螺仪自制Arduino数字量角器相关推荐
- Arduino uno + mpu6050 陀螺仪 运用卡尔曼滤波姿态解算实验
MPU6050六轴陀螺仪 作用于四轴无人机,平衡车,机器人等等的电子实作当中,用于姿态判断,掌握了可以发挥自己的想象完成更多更有趣的作品. 本例程输出XYZ的角度,正负90度. 运用卡尔曼滤波算法解算 ...
- 【51单片机快速入门指南】4.3: I2C读取MPU6050陀螺仪的原始数据
目录 硬知识 特性参数 MPU6050 简介 模块重要寄存器简介 电源管理寄存器 1 陀螺仪配置寄存器 加速度传感器配置寄存器 FIFO 使能寄存器 陀螺仪采样率分频寄存器 配置寄存器 电源管理寄存器 ...
- android 陀螺仪滤波_Arduino MPU6050陀螺仪运用卡尔曼滤波姿态解算实验
Arduino MPU6050陀螺仪运用卡尔曼滤波姿态解算实验 版权声明:本文为博主原创文章,未经博主允许不得转载. 2019年3月20日 发布 实例效果 输出效果: 首先看看本例程XYZ轴的输出效果 ...
- android 陀螺仪滤波_Arduino+mpu6050陀螺仪运用卡尔曼滤波姿态解算实验
MPU6050六轴陀螺仪 作用于四轴无人机,平衡车,机器人等等的电子实作当中,用于姿态判断,掌握了可以发挥自己的想象完成更多更有趣的作品. 本例程输出XYZ的角度,正负90度. 运用卡尔曼滤波算法解算 ...
- 树莓派基础实验31:MPU6050陀螺仪加速度传感器实验
一.介绍 MPU6050是世界上第一款也是唯一一款专为智能手机.平板电脑和可穿戴传感器的低功耗.低成本和高性能要求而设计的6轴运动跟踪设备. 它集成了3轴MEMS陀螺仪,3轴MEMS加速度 ...
- 平衡车入门---MPU6050陀螺仪的使用
平衡车入门---MPU6050陀螺仪的使用 一.MPU6050简介 二.学习MPU6050的步骤 三.I2C协议简介 四.MPU6050硬件介绍 五.MPU6050的几个重要寄存器 六.原始数据的单位 ...
- MPU-6050陀螺仪灵敏度LSBs/°/sec含义并与GY-85对比
MPU-6050陀螺仪灵敏度LSBs/°/sec含义并与GY-85对比 引言 MPU-6050陀螺仪灵敏度参数 GY-85陀螺仪灵敏度参数 结语 引言 在研究MEMS陀螺的时候尝试过GY-85,但是测 ...
- 自制Arduino便携式超声波测距仪
自制Arduino便携式超声波测距仪 一. 电路连接 二. 代码实现 此制作受油管大神Paul教学视频启发 一.电路连接: 二.代码实现 #include <Wire.h> #includ ...
- STM32F4之MPU6050陀螺仪
STM32F4之MPU6050陀螺仪串口输出DMP角度 1.陀螺仪的yaw.pitch.roll方向 2.陀螺仪.加速度计.磁场计及滤波算法与姿态融合 3.快速使用官方代码(以正点原子MPU6050为 ...
最新文章
- Linux 数据同步方案
- 官网下载的mysql密码忘了怎么办_MySQL密码忘了怎么办?MySQL重置root密码方法
- Python常见问题解决记录1-Non-ASCII character ‘\xe7‘错误
- 170517、Redis 的安装与使用(单节点)
- weblogic部署springboot项目
- 一个专门下载全球气象站数据的网站(包括中国700多个站)
- Google谷歌的未来 野心:2017 Google I/O 大会 全程回顾
- 不花一分钱申请免费域名和ssl证书
- mongodb4.4 windows环境安装
- Everedit软件下载、安装和运行(免注册)
- 刚才玩了下Steganos Internet Anonym,IP伪装器,每一秒自动换一IP
- html浏览默认ie8,ie8设置默认浏览器
- mysql条件增量同步命令_DataX3 Mysql增量同步ES
- ubuntu 20.04 安装录屏软件 OBS 及卸载
- 访客模式 无痕模式 区别_访客设计模式示例
- CCNA-应试教育-思科网院-CCNAv7: Switching, Routing, and Wireless Essentials 交换、路由和无线基础。
- Java后端面试必问:四十八道面试题及答案最新整理(速看速藏)
- itext 合并 pdf 并插入页码
- Java虚拟机(Jvm详解)
- 租房“免押金”大面积落地,年底租房人群迎来一点甜