信赖域(Trust Region)算法
文章来源:http://www.codelast.com/
如果你关心最优化(Optimization),你一定听说过一类叫作“信赖域(Trust Region)”的算法。在本文中,我将讲述一下信赖域算法与一维搜索的区别、联系,以及信赖域算法的数学思想,实现过程。
【1】信赖域算法与一维搜索算法的区别、联系
最优化的目标是找到极小值点,在这个过程中,我们需要从一个初始点开始,先确定一个搜索方向 d ,在这个方向上作一维搜索(line search),找到此方向上的可接受点(例如,按两个准则的判定)之后,通过一定的策略调整搜索方向,然后继续在新的方向上进行一维搜索,依此类推,直到我们认为目标函数已经收敛到了极小值点。
这种通过不断调整搜索方向,再在搜索方向上进行一维搜索的技术被很多很多算法采用,也取得了很实际的工程意义,但是,我们非要这样做不可吗?有没有另外一种途径,可以不通过“调整搜索方向→进行一维搜索”的步骤,也能求得极小值点?当然有,这就是信赖域算法干的好事。
为了说明这两种途径所实现的算法的区别和联系,请允许我做一个可能不太恰当,但是比较形象的比喻:
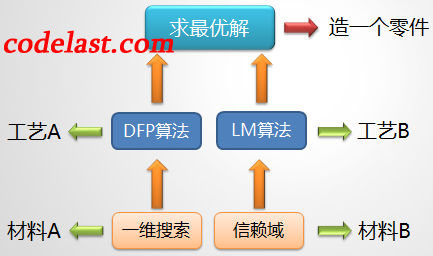
上图表述的是:如果把求最优解的过程比喻为“造一个零件”的过程的话,那么,使用一维搜索的那些算法和信赖域算法就像是两种不同的工艺,它们分别使用不同的技术(一维搜索&信赖域方法)——即两种不同的材料作为达成最终目标的基础。
作为一个了解最优化理论并不多的人,我从我看到过的书得到的感受就是:相比使用一维搜索的那一类算法,貌似信赖域算法们的应用还不够那么多。当然这仅仅是个人感觉,勿扔砖…
【2】信赖域算法的基本思想
信赖域和line search同为最优化算法的基础算法,但是,从“Trust Region”这个名字你就可以看出,它是没有line search过程的,它是直接在一个region中“search”。
在一维搜索中,从 xk 点移动到下一个点的过程,可以描述为: xk+αkdk
此处 αkdk 就是在 dk 方向上的位移,可以记为 sk
而信赖域算法是根据一定的原则,直接确定位移 sk ,同时,与一维搜索不同的是,它并没有先确定搜索方向 dk 。如果根据“某种原则”确定的位移能使目标函数值充分下降,则扩大信赖域;若不能使目标函数值充分下降,则缩小信赖域。如此迭代下去,直到收敛。
关于这种寻优的方法,我这里又有一个比喻,希望能帮助你理解:
要从上海火车站去人民广场,有两种方法:
①可以先定一个方向,比如先向西走,走着走着发现方向有点不对(人民广场应该是时尚地标啊,怎么越走感觉越郊区了呢),就调整一下方向,变成向东南方向走,诸如此类。
②用信赖域算法,就比如,我先划一个圈,然后在这个圈里面找离人民广场可能最接近的点,如果我的圈划得太大了,一下子就划到了莘庄(不熟悉上海的同学可以查一下地图),我一步就走到了上海南站,那还得了,马上给我回来,把圈缩小到两个地铁站的距离之内,然后再在里面找离人民广场最近的点。
【3】信赖域算法的数学模型
前面说了,根据一定的原则,可以直接确定位移,那么,这个原则是什么呢?
答:利用二次模型模拟目标函数 f(x) ,再用二次模型计算出位移 s 。根据位移 s 可以确定下一点 x+s ,从而可以计算出目标函数的下降量(下降是最优化的目标),再根据下降量来决定扩大信赖域或缩小信赖域。
那么,我该如何判定要扩大还是缩小信赖域呢?为了说明这个问题,必须先描述信赖域算法的数学模型:
min q^k(s) = f(x_k) + g_k^Ts+\frac{1}{2}s^TG_ks \\ s.t. ||s||\leq h_k
第一个式子就是我们用于模拟目标函数的二次模型,其自变量为 s ,也就是我们要求的位移。 gk 为梯度, Gk 为Hesse矩阵,袁亚湘的书上说,如果Hesse矩阵不好计算,可以利用“有限差分”来近似 Gk (不好意思我不懂),或者用拟牛顿方法来构造Hesse矩阵的近似矩阵。
第二个式子中的 hk 是第 k 次迭代的信赖域上界(或称为信赖域半径),因此第二个式子表示的就是位移要在信赖域上界范围内。此外,第二个式子中的范数是没有指定是什么范数的,例如,是2-范数还是∞-范数之类的(在实际中都有算法用这些范数)。
现在又回到了上面的问题:我该如何判定要扩大还是缩小信赖域呢?通过衡量二次模型与目标函数的近似程度,可以作出判定:
第 k 次迭代的实际下降量为: Δfk=fk−f(xk+sk)Δfk=fk−f(xk+sk)
第 k 次迭代的预测下降量为: Δmk=fk−m(sk)Δmk=fk−m(sk)
定义比值: rk=ΔfkΔmkrk=ΔfkΔmk
这个比值可以用于衡量二次模型与目标函数的近似程度,显然 r 值越接近1越好。
由此,我们就可以给出一个简单的信赖域算法了。
【4】信赖域算法的步骤
一个考虑周全的信赖域算法可能非常麻烦,为了说明其步骤,这里只说明基本的迭代步骤:
从初始点 x0 ,初始信赖域半径 h0=∥g0∥ 开始迭代
到第 k 步时,计算 gk 和 Gk
解信赖域模型,求出位移 sk ,计算 rk
若 rk≤0.25 ,说明步子迈得太大了,应缩小信赖域半径,令 hk+1=∥sk∥4
若 rk≥0.75 且 ∥sk∥=hk ,说明这一步已经迈到了信赖域半径的边缘,并且步子有点小,可以尝试扩大信赖域半径,令 hk+1=2hk
若0.25<rk<0.750.25 ,说明这一步迈出去之后,处于“可信赖”和“不可信赖”之间,可以维持当前的信赖域半径,令 hk+1=hk,若 rk≤0 ,说明函数值是向着上升而非下降的趋势变化了(与最优化的目标相反),这说明这一步迈得错得“离谱”了,这时不应该走到下一点,而应“原地踏步”,即 xk+1=xk ,并且和上面 rk≤0.25 的情况一样缩小信赖域。反之,在 rk>0 的情况下,都可以走到下一点,即 xk+1=xk+sk
【5】最重要的一种信赖域算法:Levenberg-Marquardt算法
当信赖域模型中的范数 ∥s∥≤hk 取2-范数时(即 ∥s∥2≤hk ),就得到了Levenberg-Marquardt算法(简称LM算法)的数学模型:
min q^k(s) = f(x_k) + g_k^Ts+\frac{1}{2}s^TG_ks \\ s.t. ||s||\leq h_k
具体请看LM算法。
【6】信赖域算法的收敛性
信赖域算法具有整体收敛性。这个证明略。
信赖域(Trust Region)算法相关推荐
- 数学知识-- 信赖域(Trust Region)算法是怎么一回事
信赖域(Trust Region)算法是怎么一回事 转载自: https://www.codelast.com/原创信赖域trust-region算法是怎么一回事/ 如果你关心最优化(Optimiza ...
- 信赖域(Trust Region)算法和L-M算法
近期在将样条数据进行公式化. 这时候发现多项高斯函数函数很好用,里面发现了两种优化高斯函数参数的算法一种是信赖域算法(Trust Region),另一种是L-M算法(Levenberg-Marquad ...
- 信赖域(Trust Region)
信赖域算法与一维搜索算法的区别.联系 在Jorge Nocedal和Stephen J. Wright的<Numerical Optimization>一书的第2.2节介绍了解优化问题的两 ...
- 深度增强学习(DRL)漫谈 - 信赖域(Trust Region)系方法
一.背景 深度学习的兴起让增强学习这个古老的机器学习分支迎来一轮复兴.它们的结合领域-深度增强学习(Deep reinforcement learning, DRL)随着在一系列极具挑战的控制实验场景 ...
- matlab中信赖域法,第8讲信赖域方法.ppt
第8讲信赖域方法 3.6 信赖域方法( Trust-Region Methods) * 基本思想 线性搜索与信赖域方法的联系 信赖域方法思想 信赖域半径的选择 信赖域算法 信赖域方法的收敛性 解信赖域 ...
- 迭代求解最优化问题——信赖域方法
信赖域方法 前面提到了Line Search算法分为两步,首先确定方向,然后确定步长,实际上是假设近似模型在某一方向上可以较好的代表真实模型.Trust region算法则在此基础上,假设在一个选定的 ...
- 基于Dogleg思想和精确Hessian的信赖域方法及实例(附MATLAB程序)
关于信赖域方法的完整介绍,请参照博客信赖域方法. 优化问题简介 此处我们简要介绍理论计算: 给定无约束优化问题minx∈Rnf(x),\min\limits_{x\in \mathbb{R}^n}f ...
- 【优化算法】信赖域折线(狗腿)法(Trust Region Dogleg Method)
出发点 刘红英老师的最优化课程需要用到信赖域方法,求解问题并画图,网上找到的中文内容的矩阵实验室(MATLAB)信赖域折线(狗腿)法求解代码,都很繁琐,而且心理感觉不可靠(手动狗头),而且我没心思一点 ...
- 信赖域算法-The Dogleg Method(含例题及Python实现)
文章目录 前言 一.What is The Dogleg Method? 信赖域算法原理 Dogleg Method 方法 信赖域算法流程 二.How to use The Dogleg Method ...
最新文章
- 解决selenium报错--unknown error: DevToolsActivePort file doesn‘t exist
- Python异步爬取知乎热榜
- Python操作Redis的5种数据类型
- 哔哩哔哩n倍速播放视频
- jsp+servlet+mysql实现的图书管理系统源码
- opencv图像分析与处理(14)- 图像压缩基础知识
- 8音度dsp调音教程_8音度汽车调音软件
- 军职在线大学生计算机基础答案,大学计算机基础试题-及答案~完整版.doc
- 计算机开放电子书 2016 归档
- 惠普136nw打印机清零_惠普打印机硒鼓清零方法是怎样的
- libaio介绍和使用
- FilterSecurityInterceptor详解
- 多版本环境管理工具sdkman
- 【高德LBS开源组件大赛】回眸微博的足迹
- 第四次作业之四则运算
- 计算机视觉 || 手写字体检测
- Unity 材质设置为tiling不能够重复的问题
- ES快速入门(七) ElasticSearch7.X分布式部署
- 数据库DevOps:我们如何提供安全、稳定、高效的研发全自助数据库服务-iDB/DMS企业版...
- 小学文凭宝妈在家开网店?其实做跨境并不难!