Eigen的基础使用-C++
为什么80%的码农都做不了架构师?>>> 
#Eigen的安装
下载Eigen以后直接引用头文件即可,需要的头文件如下 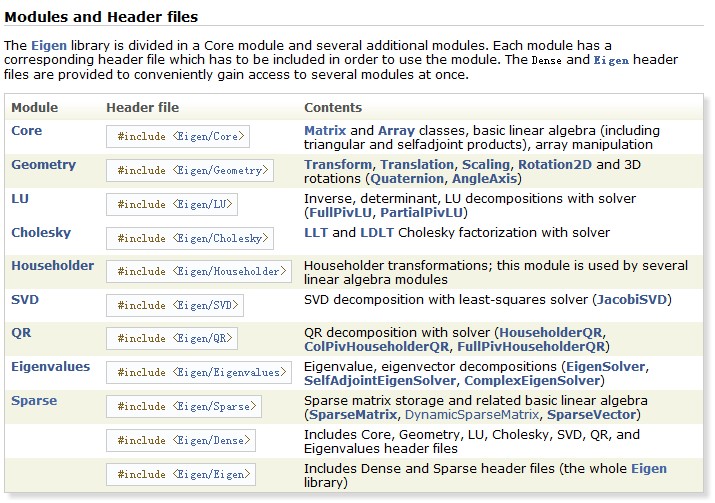
Eigen支持的编译器类型
GCC, version 4.4 and newer.
MSVC (Visual Studio), 2010 and newer. (the old 3.1 version of Eigen supports MSVC 2008).
Intel C++ compiler. Enabling the -inline-forceinline option is highly recommended.
LLVM/CLang++, version 3.4 and newer. (The 2.8 version used to work fine, but it is not tested with up-to-date versions of Eigen)
XCode 4 and newer. Based on LLVM/CLang.
MinGW, recent versions. Based on GCC.
QNX's QCC compiler.
接下来把文件解压,将解压后的文件放到你的工程项目目录下
填写cmake
cmake_minimum_required( VERSION 2.8 )
project( useEigen )set( CMAKE_BUILD_TYPE "Release" )
set( CMAKE_CXX_FLAGS "-O3" )# 添加Eigen头文件
include_directories( "/usr/include/eigen3" )# in osx and brew install
# include_directories( /usr/local/Cellar/eigen/3.3.3/include/eigen3 )add_executable( eigenMatrix eigenMatrix.cpp )
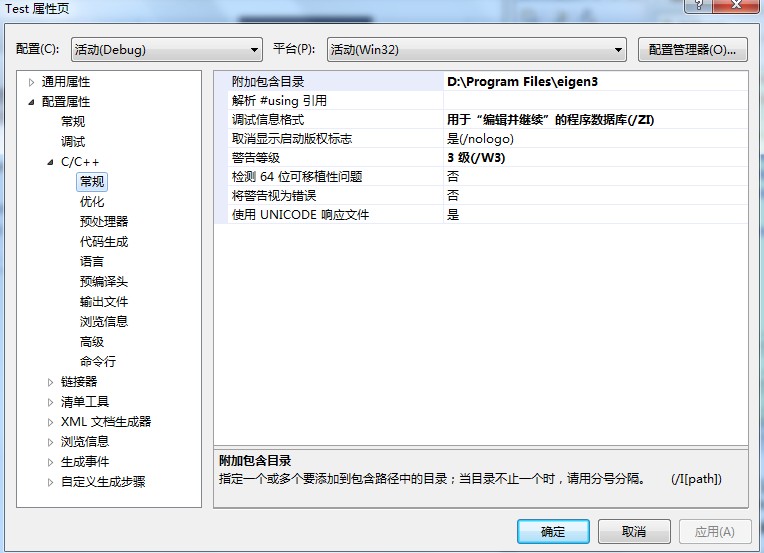
VS下的配置
接下来测试代码:
#include <iostream>
using namespace std;
#include <ctime>
// Eigen 部分
#include <Eigen/Core>
// 稠密矩阵的代数运算(逆,特征值等)
#include <Eigen/Dense>#define MATRIX_SIZE 50/****************************
* 本程序演示了 Eigen 基本类型的使用
****************************/int main( int argc, char** argv )
{// Eigen 中所有向量和矩阵都是Eigen::Matrix,它是一个模板类。它的前三个参数为:数据类型,行,列// 声明一个2*3的float矩阵Eigen::Matrix<float, 2, 3> matrix_23;// 同时,Eigen 通过 typedef 提供了许多内置类型,不过底层仍是Eigen::Matrix// 例如 Vector3d 实质上是 Eigen::Matrix<double, 3, 1>,即三维向量Eigen::Vector3d v_3d;// 这是一样的Eigen::Matrix<float,3,1> vd_3d;// Matrix3d 实质上是 Eigen::Matrix<double, 3, 3>Eigen::Matrix3d matrix_33 = Eigen::Matrix3d::Zero(); //初始化为零// 如果不确定矩阵大小,可以使用动态大小的矩阵Eigen::Matrix< double, Eigen::Dynamic, Eigen::Dynamic > matrix_dynamic;// 更简单的Eigen::MatrixXd matrix_x;// 这种类型还有很多,我们不一一列举// 下面是对Eigen阵的操作// 输入数据(初始化)matrix_23 << 1, 2, 3, 4, 5, 6;// 输出cout << matrix_23 << endl;// 用()访问矩阵中的元素for (int i=0; i<2; i++) {for (int j=0; j<3; j++)cout<<matrix_23(i,j)<<"\t";cout<<endl;}// 矩阵和向量相乘(实际上仍是矩阵和矩阵)v_3d << 3, 2, 1;vd_3d << 4,5,6;// 但是在Eigen里你不能混合两种不同类型的矩阵,像这样是错的// Eigen::Matrix<double, 2, 1> result_wrong_type = matrix_23 * v_3d;// 应该显式转换Eigen::Matrix<double, 2, 1> result = matrix_23.cast<double>() * v_3d;cout << result << endl;Eigen::Matrix<float, 2, 1> result2 = matrix_23 * vd_3d;cout << result2 << endl;// 同样你不能搞错矩阵的维度// 试着取消下面的注释,看看Eigen会报什么错// Eigen::Matrix<double, 2, 3> result_wrong_dimension = matrix_23.cast<double>() * v_3d;// 一些矩阵运算// 四则运算就不演示了,直接用+-*/即可。matrix_33 = Eigen::Matrix3d::Random(); // 随机数矩阵cout << matrix_33 << endl << endl;cout << matrix_33.transpose() << endl; // 转置cout << matrix_33.sum() << endl; // 各元素和cout << matrix_33.trace() << endl; // 迹cout << 10*matrix_33 << endl; // 数乘cout << matrix_33.inverse() << endl; // 逆cout << matrix_33.determinant() << endl; // 行列式// 特征值// 实对称矩阵可以保证对角化成功Eigen::SelfAdjointEigenSolver<Eigen::Matrix3d> eigen_solver ( matrix_33.transpose()*matrix_33 );cout << "Eigen values = \n" << eigen_solver.eigenvalues() << endl;cout << "Eigen vectors = \n" << eigen_solver.eigenvectors() << endl;// 解方程// 我们求解 matrix_NN * x = v_Nd 这个方程// N的大小在前边的宏里定义,它由随机数生成// 直接求逆自然是最直接的,但是求逆运算量大Eigen::Matrix< double, MATRIX_SIZE, MATRIX_SIZE > matrix_NN;matrix_NN = Eigen::MatrixXd::Random( MATRIX_SIZE, MATRIX_SIZE );Eigen::Matrix< double, MATRIX_SIZE, 1> v_Nd;v_Nd = Eigen::MatrixXd::Random( MATRIX_SIZE,1 );clock_t time_stt = clock(); // 计时// 直接求逆Eigen::Matrix<double,MATRIX_SIZE,1> x = matrix_NN.inverse()*v_Nd;cout <<"time use in normal inverse is " << 1000* (clock() - time_stt)/(double)CLOCKS_PER_SEC << "ms"<< endl;// 通常用矩阵分解来求,例如QR分解,速度会快很多time_stt = clock();x = matrix_NN.colPivHouseholderQr().solve(v_Nd);cout <<"time use in Qr decomposition is " <<1000* (clock() - time_stt)/(double)CLOCKS_PER_SEC <<"ms" << endl;return 0;
}即可测试成功
转载于:https://my.oschina.net/VenusV/blog/1476681
Eigen的基础使用-C++相关推荐
- 【Eigen】Eigen库基础语法
这里是Eigen库的一些基础语法,摘自<视觉SLAM十四讲>,修改了书中代码的一些bug,部分地方添加了一些自己的理解. 头文件相关 #include <Eigen/Core> ...
- Eigen/Matlab 使用小结
文章目录 [Eigen Matlab使用小结](https://www.cnblogs.com/rainbow70626/p/8819119.html) Eigen初始化 0.[官网资料](http: ...
- Eigen: C++开源矩阵计算库
Eigen库被分为一个Core模块和几个附加的模块,每个模块有一个相关的头文件,使用该模块时需要包含该头文件,为了能便利的使用eigen的几个模块,Eigen提供了Dense和Eigen两个头文件,各 ...
- 从零开始的VIO——Eigen和Sophus的安装配置
1. 前言 笔者最近开始学习深蓝学院的网课<从零开始手写VIO>,先前读过<视觉slam十四讲>以及<机器人学中的状态估计>两本书,光是里面的数学推导都感到非常吃力 ...
- Eigen库学习教程(全)
说明:本教程主要是对eigen官网文档做了一个简要的翻译,参考了eigen官网以及一些博主的技术贴,在此表示感谢. Eigen是一个高层次的C ++库,有效支持线性代数,矩阵和矢量运算,数值分析及其相 ...
- SLAM知识[7]:依赖项和安装
1 SLAM有什么依赖项? SLAM开发的依赖项有下列7项: 1.1 KDevelop 是集成开发环境.创建新工程.导入工程.编译.执行文件. 1.2 Eigen Eigen 是一个线性算术的C++ ...
- EKF优化:协方差coff公式、意义、SLAM中的Code优化
1.代码:Matlab相关系数的意义: Eigen::MatrixXf correlation_matrix = corrcoef( LocM ); 对行向量求相关系数 , 与列数无关,返回 cols ...
- 四足机器人 | GEM(elevation map) + Fast_Lio(odometry) 环境部署记录
由于项目和科研需要,经常需要在不同的平台上(例如我的台式机和项目pc)部署 GEM(elevation map) + Fast_lio(odomtry) 的环境,因此记录下安装过程和过程中每次都会出现 ...
- 视觉SLAM十四讲 第3讲 三维空间刚体运动(相关知识点汇总)
视觉SLAM十四讲 第3讲 三维空间刚体运动 1. 刚体 2. 欧氏空间(euclidean space) 2.1 欧氏距离: 2.2 欧氏变换: 3. 笛卡尔坐标系 4. 透视空间 5. 齐次坐标系 ...
最新文章
- IntelliJ IDEA Maven Gradle的配置
- c代码实现 ifft运算_fft算法c语言_matlab fft算法_ifft c语言
- 细节取胜的javadoc
- python书籍排行榜前十名_学习Python,这些书你看过几本?
- python args kw_Python基础-参数魔法,*args,**kwags
- SpringBoot2.0系列(1)----初识SpringBoot
- django系列5.2--ORM数据库的单表操作
- 【Tensorflow】相关面试题整理(转)
- JavaScript---radio组
- 〖工具〗Ladon 8.4 Cobalt Strike插件发布
- (轉貼) 人人有功練!! 有功夫,沒懦夫 (News)
- 谷歌浏览器怎么长截图怎么截_Google浏览器如何截取网页长图 - 里维斯社
- assume用法及意思_assume用法及例句
- win7显示隐藏文件夹的方法
- 前端---HTML制作百度首页
- linux 网络慢 dns,Linux DNS客户端解析域名慢解决
- Android如何快速创建启动动画
- csdn里的KaTex 公式语法
- Python:读文件和写文件
- oppo小游戏接入代码
热门文章
- zblog主题OL免费清爽资讯博客主题
- WordPress主题 酱茄模块源码
- ftp邮箱里的文件无法连接服务器,服务器FTP不能连接的一些解决方法 - 新网数据 - 主机,域名,邮箱提供商 - www.nIDC.cn...
- mysql 2008数据库配置文件_SQL Server 2008数据库的配置及连接
- 2020恩智浦智能车大赛规则_2020年世界人工智能围棋大赛落幕,各路围棋AI共同论道...
- VUEX封装module
- 聚合登录平台网站源码
- RabbitMQ入门学习系列(四) 发布订阅模式
- c# int byte转
- sed 执行错误:sed: 1: “…”: Invalid command code f