毫米波/激光/超声波雷达的区别
转自:http://www.sohu.com/a/201826967_524185
不知何时,自动驾驶技术从电影中跳出来,直接被拉到人们视野中。不过,去年特斯拉却因为几起自动驾驶事故,官网不得不把自动驾驶字眼改为辅助驾驶。本期《汽车总动员》讨论的不是自动驾驶,而是被称为自动驾驶汽车“眼睛”的雷达。
目前主流的“眼睛”有四类——毫米波雷达、激光雷达、超声波雷达、摄像头。他们各自都有自己的特点,比如摄像头的优点就很突出:精度高,距离远,直观方便;可是缺点也同样突出:受到天气的影响太大。倘若雾霾一来,或是阴雨绵绵,估计就只能两眼一抹黑了。
然而它们原理和现状都如何呢?
毫米波雷达
首先我们要明白啥是毫米波,毫米波实质上就是电磁波。毫米波的频段比较特殊,其频率高于无线电,低于可见光和红外线,频率大致范围是10GHz—200GHz。这是一个非常适合车载领域的频段。目前,比较常见的车载领域的毫米波雷达频段有三类。
1,24—24.25GHz这,目前大量应用于汽车的盲点监测、变道辅助。雷达安装在车辆的后保险杠内,用于监测车辆后方两侧的车道是否有车、可否进行变道。这个频段也有其缺点,首先是频率比较低,另外就是带宽(Bandwidth)比较窄,只有250MHz。
2,77GHz,这个频段的频率比较高,国际上允许的带宽高达800MHz。据介绍,这个频段的雷达性能要好于24GHz的雷达,所以主要用来装配在车辆的前保险杠上,探测与前车的距离以及前车的速度,实现的主要是紧急制动、自动跟车等主动安全领域的功能。
3,79GHz—81GHz,这个频段最大的特点就是其带宽非常宽,要比77GHz的高出3倍以上,这也使其具备非常高的分辨率,可以达到5cm。
原理:振荡器会产生一个频率随时间逐渐增加的信号,这个信号遇到障碍物之后,会反弹回来,其时延是2倍距离/光速。返回来的波形和发出的波形之间有个频率差,这个频率差和时延是呈线性关系的:物体越远,返回的波收到的时间就越晚,那么它跟入射波的频率差值就越大。
将这两个频率做一个减法,就可以得到二者频率的差频(差拍频率),通过判断差拍频率的高低就可以判断障碍物的距离。
根据国内产业机构调查,国内2014年汽车毫米波雷达销量约为120万颗,2015年约为180万颗。主要应用为盲点检测和后方车辆提醒的中短距雷达(24Ghz),每车需要两颗。
2015年中国汽车销售量为2459.8万辆,如果2015-2020年我国的乘用车复合增速为4%,到 2020年乘用车全年销量将近约为3000万辆。到2020年,如果中国汽车销售量中有15%装配汽车毫米波雷达的话,按每辆车装配2 个,预计2020年的毫米波雷达需求量近900万个,未来五年复合增速约为50%。
目前中国市场中高端汽车装配的毫米波雷达传感器全部依赖进口,市场被美、日、德企业垄断,价格昂贵,自主可控迫在眉睫。国内企业怎么破局?前不久的IC CHINA 2017上,与非网记者参加了一个加特兰77GHz CMOS雷达芯片发布会,其产品是是全球首家采用CMOS工艺并实现量产的77GHz雷达收发芯片,不由得让人觉着欧美大厂垄断的今天,也有国产企业开始发出自己的声音。
激光雷达
激光雷达不是单纯的指发射激光的探测器就是激光雷达,工作在红外和可见光波段的,以激光为工作光束的雷达称为激光雷达。而激光雷达的工作原理是向目标发射探测信号(激光束),然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较,作适当处理后,就可获得目标的有关信息,如目标距离、方位、高度、速度、姿态、甚至形状等参数。
从本质上说激光雷达和毫米波雷达都是利用回波成像来构显被探测物体的,就相当于人类用双眼探知而蝙蝠是依靠超声波探知的区别。但激光雷达会比较容易受到自然光或是热辐射的影响,在自然光强烈或是辐射区域的时候,激光雷达将会被消弱很多而且激光雷达的造价成本高,对工艺水平要求也比较高。而毫米波雷达而言,虽然抗干扰能力较强,但是距离和精确度确实硬伤,而且在行车环境下,处于多重波段并存的环境下对毫米波的影响是极大的。毫米波对于较远处的探测能力也是极为有限的。
简单来说,激光雷达精度更高,但价格昂贵。
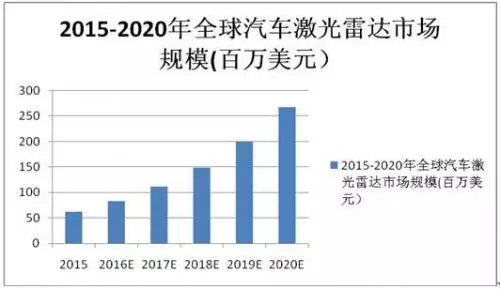
据国外调研机构的分析预测,2015年全球汽车激光雷达市场规模约为6千2百万美元,预计2020年全球市场规模将达到2.7亿美元左右。2016~2020年将以34%年复合成长率增长。
2016年以来,看好激光雷达在无人驾驶汽车的应用前景,促使许多公司包括创业公司都试图挑战激光雷达。国外领先公司有Velodyne、Quanergy、LeddarTech、ConTInental等,国内有北科天绘、禾赛科技、思岚科技、华达科捷、速腾聚创等,火爆的无人驾驶市场促使激光雷达市场竞争加剧。
业内人士普遍预计,汽车激光雷达市场快速增长将可能在2018年至2019年彻底到来。
超声波雷达
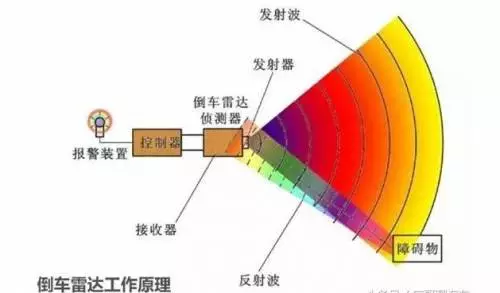
超声波发射器向外面某一个方向发射出超声波信号,在发射超声波时刻的同时开始进行计时,超声波通过空气进行传播,传播途中遇到障碍物就会立即返射传播回来,超声波接收器在收到反射波的时刻就立即停止计时。在空气中超声波的传播速度是340m/s,计时器通过记录时间t,就可以测算出从发射点到障碍物之间的距离长度(s),即:s=340t/2。
超声波的能量消耗较缓慢,在介质中传播的距离比较远,穿透性强,测距的方法简单,成本低。
但是它在速度很高情况下测量距离有一定的局限性,这是因为超声波的传输速度容易受天气情况的影响,在不同的天气情况下,超声波的传输速度不同,而且传播速度较慢,当汽车高速行驶时,使用超声波测距无法跟上汽车的车距实时变化,误差较大。另一方面,超声波散射角大,方向性较差,在测量较远距离的目标时,其回波信号会比较的弱,影响测量精度。但是,在短距离测量中,超声波测距传感器具有非常大的优势。
目前来看,宝马最新的i系列和7系列已经支持使用车钥匙遥控汽车自动泊车,在操作过程中用户只需要发出前进或后退两个指示,汽车就会持续使用超声波传感器检测车位和障碍物,自动操作方向盘和制动器,实现自动泊车。大众第三代超声波半自动泊车系统,泊车辅助系统通常使用 6-12 个超声波雷达,车后部的 4 个短距超声波雷达负责探测倒车时与障碍物之间的距离,一侧的长距超声波雷达负责探测停车位空间。
车载摄像头
车载摄像头是ADAS系统的主要视觉传感器,借由镜头采集图像后,有摄像头内的感光组件电路及控制组件对图像进行处理并转化为电脑能处理的数字信号,从而实现感知车辆周边的路况情况,实现前向碰撞预警,车道偏移报警和行人检测等ADAS功能。
车载摄像头的大致原理如下:1)图像处理,将图片转换为二维数据;2)模式识别,通过图像匹配进行识别,如车辆、行人、车道线、交通标志等;3)利用物体的运动模式,或双目定位,估算目标物体与本车的相对距离和相对速度。
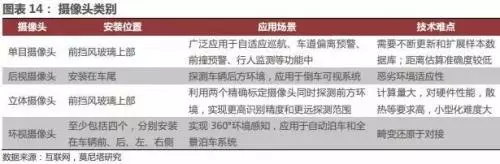
硬件方面,车载摄像头主要由CMOS镜头(包括lens和光感芯片等),芯片,其他物料(内存,sim卡,外壳)组成,分为单目摄像头、后视摄像头、立体摄像头和环视摄像头,目前市场上主要是单目摄像头为主。
软件方面,以mobileye为例,主要体现在芯片的升级和处理平台的升级,工作频率从122Mhz提升到332Mhz,访问方式的改变使速率提升一倍,图像由640*480 彩色像素提升为2048*2048(Input)和4096*2048(output)等。
除了极少数厂商具备垂直一体化的能力,绝大部分厂商都将业务集中于产业中的某个或者某几个环节。
从市场集中度来看,光学镜片主要是台湾的厂商在主导,大陆厂商在红外截止滤光片上有一定优势,图像传感器主要是欧美和韩国厂商为主,模组环节大陆、韩国、台湾、日本厂商份额居前,国内厂商成长迅速。光学镜头行业集中度很高,前五大厂商占据了60%市场份额,舜宇光学2015年出货量已占全球的9.4%,成为全球第二。
单目摄像头还是未来的主流,伴随着360度全景停车和环视系统的发展,未来单辆车载摄像头预期达到6个以上,其中1个前视,1个后视和4个环视。根据MRRSE报告,2014-2020全球车载摄像头的出货量将会以11.3%年复合率增长,预计到2020年,全球车载摄像头销售将达到8300万只。
未来五年内,双目摄像头的产品化,小型化的问题有可能逐渐突破,例如特拉斯的双目,三目的计划。
图形信息处理的芯片,算法的进步,算法主要基于深度学习的角度,芯片的发展主要体现在mobileye的EyeQ产品的升级,期待EyeQ5的研发与投入生产。
毫米波/激光/超声波雷达的区别相关推荐
- 汽车电子传感器科普:激光雷达 毫米波雷达 超声波雷达
参考: 1. 一文读懂毫米波/激光/超声波雷达的区别 | 搜狐科技 2. 毫米波雷达为何还未被激光雷达取代? | OFweek激光网 各种汽车测距传感器比较 传感器 频段 带宽 工作原理 特点 缺点 ...
- 激光与红外线的区别?激光雷达与毫米波雷达区别?毫米波雷达无法感知行人吗?关于Intel Realsense D435有源红外技术猜想
文章目录 激光与红外线的区别是什么呢? 激光雷达和毫米波雷达区别 毫米波雷达无法感知行人吗? 关于Intel Realsense D435有源红外技术猜想 阅读Intel Realsense文档的时候 ...
- 激光雷达和毫米波雷达的区别
什么是激光雷达 激光雷达,是以发射激光束探测目标的位置.速度等特征量的雷达系统.其工作原理是向目标发射探测信号(激光束),然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较,作适当处理后 ...
- 自动驾驶技术-环境感知篇:激光雷达、毫米波雷达、超声波雷达相关技术介绍
在上一篇<自动驾驶技术架构和综述>文章中我们介绍了自动驾驶三个核心环节,分别是环境感知和定位.决策规划.执行控制.接下来这章将会针对环境感知和定位展开介绍,环境感知和定位包含环境感知.定位 ...
- 自动驾驶技术之——被低估的传感器超声波雷达
常见的超声波雷达有两种.第一种是安装在汽车前后保险杠上的,也就是用于测量汽车前后障碍物的倒车雷达,这种雷达业内称为UPA:第二种是安装在汽车侧面的,用于测量侧方障碍物距离的超声波雷达,业内称为APA. ...
- 无人驾驶技术入门(八)| 被严重低估的传感器超声波雷达
在上一次分享中,我介绍了毫米波雷达的原理.数据特性及优缺点.毫米波雷达的低环境敏感和低成本的特性使得其在ADAS和自动驾驶领域得到了广泛的应用. 今天要介绍的是一款极其常见的传感器--超声波雷达.如果 ...
- stm32超声波测距代码_干货!特斯拉Autopilot核心传感器解读超声波雷达篇
加入高工智能汽车行业群(自动驾驶行业4群,车联网智能座舱3群,智能商用车行业群),加微信:15818636852,并出示名片,仅限智能网联汽车零部件及OEM厂商. 目前为止,特斯拉的Autopilot ...
- 自动驾驶专题介绍 ———— 超声波雷达
文章目录 介绍 工作原理 特点 常见参数 探测时序 介绍 在汽车碰撞事故中,有大约15%的事故是因为倒车时汽车的后视能力不足引起的,因为增加汽车的后视能力的超声波雷达的研究成为了当下的热点之一.安全 ...
- 自动驾驶(四十七)---------超声波雷达简介
超声波雷达听着很陌生,但其实一直被广泛使用在倒车上,与毫米波雷达不同的是:超声波能被任何材质的障碍物反射,毫米波只能被金属物体反射,超声波雷达的探测距离又很近,到底工作原理是什么,下面我带大家一起来来 ...
最新文章
- dns tunnel 使用 nishang 下载TXT里的cmd(TXT里)实现CC command+ ceye实现数据外发
- 2.3.1 为超参数选择合适的范围
- Basic Example of JMX Technology--转载
- python字符串format格式化
- paip.mysql备份慢的解决
- 触屏java版象棋下载 游戏下载安装_中国象棋官方版下载
- 安徽宣城职业技术学院引入USB Server远程管理加密狗
- 留言系统php课程设计,PHP课程设计网络留言板
- linux 电源管理 power supply class
- Git amend 修改上次提交
- idea配置port
- excel去掉公式()
- loj6388 「THUPC2018」赛艇 / Citing
- 域控服务器更新规则,由服务器升级为域控制器的方法
- 西安python程序员薪资_最新程序员薪资统计来了!Java均薪16K,Python22k!你拖后腿了吗?...
- 如何下载linux内核头文件,在Linux系统上安装Linux内核头文件的教程
- C#事务处理(三)之Transactions事务
- 题解 | Coffee Chicken-2019牛客暑期多校训练营第十场B题
- C++Primer之4.6枚举读书笔记
- Could not find org.jetbrains.kotlin:kotlin-gradle-plugin:1.5.0-release-764.