使用PyTorch实现CNN
使用PyTorch实现CNN
文章目录
- 使用PyTorch实现CNN
- 1. 导入所需包:
- 2. 获取数据集
- 2.1 获取数据集,并对数据集进行预处理
- 2.2 获取迭代数据:`data.DataLoader()`
- 3. 定义网络结构
- 4. 定义损失和优化器
- `model.parmaters()`含义:
- 5. 训练网络
- 损失图:
- 如果使用MSELoss:平方差损失
- 7. 测试网络:精确度:0.98
- 8. 其他实验:
- 8.1 全连接第一层增加ReLU激活函数:提高了0.02
- 8.2 去掉批量归一化:降低了0.01
- 8.3 使用LeakyReLU激活函数:降低0.01
- 8.4 使用PReLU激活函数:提升0.01
- 卷积方法的使用:`torch.nn.Conv2d()`
- 反卷积方法的使用:`torch.nn.ConvTranspose2d()`
1. 导入所需包:
import torch
from torch.utils import data # 获取迭代数据
from torch.autograd import Variable # 获取变量
import torchvision
from torchvision.datasets import mnist # 获取数据集
import matplotlib.pyplot as plt
2. 获取数据集
2.1 获取数据集,并对数据集进行预处理
(1)对原有数据转成Tensor类型
(2)用平均值和标准偏差归一化张量图像
# 数据集的预处理
data_tf = torchvision.transforms.Compose([torchvision.transforms.ToTensor(),torchvision.transforms.Normalize([0.5],[0.5])]
)data_path = r'C:\Users\liev\Desktop\myproject\yin_test\MNIST_DATA_PyTorch'
# 获取数据集
train_data = mnist.MNIST(data_path,train=True,transform=data_tf,download=False)
test_data = mnist.MNIST(data_path,train=False,transform=data_tf,download=False)
第一次下载的输出:
Downloading http://yann.lecun.com/exdb/mnist/train-images-idx3-ubyte.gz
Downloading http://yann.lecun.com/exdb/mnist/train-labels-idx1-ubyte.gz
Downloading http://yann.lecun.com/exdb/mnist/t10k-images-idx3-ubyte.gz
Downloading http://yann.lecun.com/exdb/mnist/t10k-labels-idx1-ubyte.gz
Processing...
Done!
注意:
- 对数据的预处理还有很多。
- 第一次获取数据集时,参数download=True,会下载MNIST数据集所有文件,包括训练集和测试集
- 获取MNIST数据集的步骤:
如果本地没有数据集:
train_data = mnist.MNIST(data_path,train=True,transform=data_tf,download=True)等待下载,直到下载完成
train_data = mnist.MNIST(data_path,train=True,transform=data_tf,download=False) test_data = mnist.MNIST(data_path,train=False,transform=data_tf,download=False)获取测试集和训练集
如果本地有数据集
train_data = mnist.MNIST(data_path,train=True,transform=data_tf,download=False) test_data = mnist.MNIST(data_path,train=False,transform=data_tf,download=False)
2.2 获取迭代数据:data.DataLoader()
train_loader = data.DataLoader(train_data,batch_size=128,shuffle=True)
test_loader = data.DataLoader(test_data,batch_size=100,shuffle=True)
注意:
- DataLoader返回的是所有的数据,只是分成了每批次为参数batch_size的数据
- DataLoader的shuffle参数,True 决定了是否能多次取出batch_size,False,则表明只能取出数据集大小的数据。
3. 定义网络结构
| CNN网络结构 | 输入shape | 卷积核 | 激活函数 | 输出图像 |
|---|---|---|---|---|
| conv1 | [128,1,28,28] | [3,3,1,16] | ReLU | [128, 16, 14, 14] |
| conv2 | [128, 16, 14, 14] | [3,3,16,32] | ReLU | [128, 32, 7, 7] |
| conv3 | [128, 32, 7, 7] | [3,3,32,64] | ReLU | [128, 64, 4, 4] |
| conv4 | [128, 64, 4, 4] | [3,3,64,64] | ReLU | [128, 64, 2, 2] |
代码实现:
# 定义网络结构
class CNNnet(torch.nn.Module):def __init__(self):super(CNNnet,self).__init__()self.conv1 = torch.nn.Sequential(torch.nn.Conv2d(in_channels=1,out_channels=16,kernel_size=3,stride=2,padding=1),torch.nn.BatchNorm2d(16),torch.nn.ReLU())self.conv2 = torch.nn.Sequential(torch.nn.Conv2d(16,32,3,2,1),torch.nn.BatchNorm2d(32),torch.nn.ReLU())self.conv3 = torch.nn.Sequential(torch.nn.Conv2d(32,64,3,2,1),torch.nn.BatchNorm2d(64),torch.nn.ReLU())self.conv4 = torch.nn.Sequential(torch.nn.Conv2d(64,64,2,2,0),torch.nn.BatchNorm2d(64),torch.nn.ReLU())self.mlp1 = torch.nn.Linear(2*2*64,100)self.mlp2 = torch.nn.Linear(100,10)def forward(self, x):x = self.conv1(x)x = self.conv2(x)x = self.conv3(x)x = self.conv4(x)x = self.mlp1(x.view(x.size(0),-1))x = self.mlp2(x)return x
model = CNNnet()
print(model)
输出:
CNNnet((conv1): Sequential((0): Conv2d(1, 16, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))(1): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(2): ReLU())(conv2): Sequential((0): Conv2d(16, 32, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))(1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(2): ReLU())(conv3): Sequential((0): Conv2d(32, 64, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))(1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(2): ReLU())(conv4): Sequential((0): Conv2d(64, 64, kernel_size=(2, 2), stride=(2, 2))(1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(2): ReLU())(mlp1): Linear(in_features=256, out_features=100, bias=True)(mlp2): Linear(in_features=100, out_features=10, bias=True)
)
4. 定义损失和优化器
(1)使用交叉熵损失
(2)使用Adam优化器
loss_func = torch.nn.CrossEntropyLoss()
opt = torch.optim.Adam(model.parameters(),lr=0.001)
model.parmaters()含义:使用损失和优化器的步骤:
- 获取损失:
loss = loss_func(out,batch_y) - 清空上一步残余更新参数:
opt.zero_grad() - 误差反向传播:
loss.backward() - 将参数更新值施加到
net的parmeters上:opt.step()
- 获取损失:
5. 训练网络
loss_count = []
for epoch in range(2):for i,(x,y) in enumerate(train_loader):batch_x = Variable(x) # torch.Size([128, 1, 28, 28])batch_y = Variable(y) # torch.Size([128])# 获取最后输出out = model(batch_x) # torch.Size([128,10])# 获取损失loss = loss_func(out,batch_y)# 使用优化器优化损失opt.zero_grad() # 清空上一步残余更新参数值loss.backward() # 误差反向传播,计算参数更新值opt.step() # 将参数更新值施加到net的parmeters上if i%20 == 0:loss_count.append(loss)print('{}:\t'.format(i), loss.item())torch.save(model,r'C:\Users\liev\Desktop\myproject\yin_test\log_CNN')if i % 100 == 0:for a,b in test_loader:test_x = Variable(a)test_y = Variable(b)out = model(test_x)# print('test_out:\t',torch.max(out,1)[1])# print('test_y:\t',test_y)accuracy = torch.max(out,1)[1].numpy() == test_y.numpy()print('accuracy:\t',accuracy.mean())break
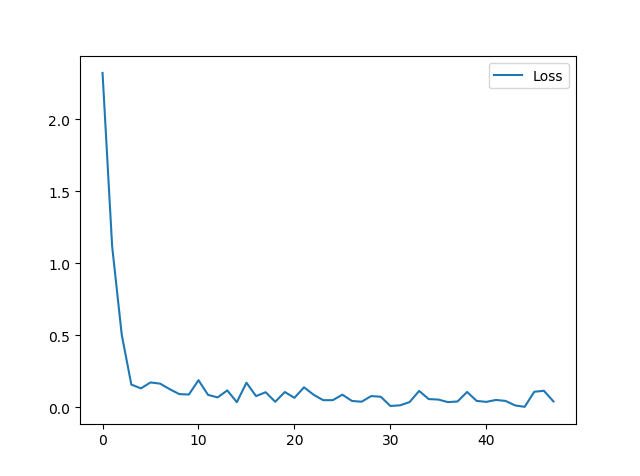
plt.figure('PyTorch_CNN_Loss')
plt.plot(loss_count,label='Loss')
plt.legend()
plt.show()
输出:
0: 2.313704252243042
accuracy: 0.11
20: 1.1835652589797974
40: 0.5378416776657104
60: 0.41440480947494507
80: 0.18270650506019592
100: 0.18721994757652283
accuracy: 0.92
......
380: 0.032591354101896286
400: 0.024792633950710297
accuracy: 1.0
420: 0.03427279368042946
440: 0.04764523729681969
460: 0.01753203198313713损失图:
如果使用MSELoss:平方差损失
将真实值转为one-hot形式
def one_hot(data):hot = np.zeros([10])hot[data] = 1return hot
# 并且在计算损失前,加入下面一行代码,将真实值转为one-hot形式
y = [one_hot(i) for i in y]
7. 测试网络:精确度:0.98
注意点:
- 获取accuracy时的问题:
- 获取的预测值shape:【128,10】
- 真实值shape:【128】,无one-hot编码
- 转换预测值:使用torch.max() 获取最后输出的每张图片预测值的最大值
# 测试网络
model = torch.load(r'C:\Users\liev\Desktop\myproject\yin_test\log_CNN')
accuracy_sum = []
for i,(test_x,test_y) in enumerate(test_loader):test_x = Variable(test_x)test_y = Variable(test_y)out = model(test_x)# print('test_out:\t',torch.max(out,1)[1])# print('test_y:\t',test_y)accuracy = torch.max(out,1)[1].numpy() == test_y.numpy()accuracy_sum.append(accuracy.mean())print('accuracy:\t',accuracy.mean())print('总准确率:\t',sum(accuracy_sum)/len(accuracy_sum))
# 精确率图
print('总准确率:\t',sum(accuracy_sum)/len(accuracy_sum))
plt.figure('Accuracy')
plt.plot(accuracy_sum,'o',label='accuracy')
plt.title('Pytorch_CNN_Accuracy')
plt.legend()
plt.show()输出:
accuracy: 0.98
accuracy: 1.0
accuracy: 1.0
accuracy: 1.
总准确率: 0.9850999999999999
8. 其他实验:
8.1 全连接第一层增加ReLU激活函数:提高了0.02
测试输出:
accuracy: 0.98
accuracy: 0.99
accuracy: 0.98
accuracy: 0.99
总准确率: 0.9872999999999992
8.2 去掉批量归一化:降低了0.01
accuracy: 0.97
accuracy: 0.97
accuracy: 0.92
总准确率: 0.9746999999999996
8.3 使用LeakyReLU激活函数:降低0.01
accuracy: 0.97
accuracy: 0.98
accuracy: 1.0
总准确率: 0.9848999999999997
8.4 使用PReLU激活函数:提升0.01
accuracy: 0.97
accuracy: 1.0
accuracy: 1.0
accuracy: 0.97
总准确率: 0.9867999999999998
卷积方法的使用:torch.nn.Conv2d()
在由多个输入平面组成的输入信号上应用2D卷积。
在最简单的情况下,具有输入大小的图层的输出值
(N,Cin,H,W)(N,Cin,H,W)(N,C_{in},H,W)(N,Cin,H,W) (N,Cin,H,W)(N,Cin,H,W)
和输出
(N,Cout,Hout,Wout)(N,Cout,Hout,Wout)(N,Cout,Hout,Wout)(N,Cout,Hout,Wout) (N,Cout,Hout,Wout)(N,Cout,Hout,Wout)
可以精确地描述为:
out(Ni,Coutj)=bias(Coutj)+∑k=0Cin−1weight(Coutj,k)⋆input(Ni,k)\text{out}(N_i,C_{out_j})=\text{bias}(C_{out_j}) + \sum_{k = 0}^{C_{in}-1}\text{weight}(C_{out_j}, k) \star\text{input}(N_i, k) out(Ni,Coutj)=bias(Coutj)+k=0∑Cin−1weight(Coutj,k)⋆input(Ni,k)
⋆是有效的2D 互相关运算符, N 是一个批量大小, C 表示多个频道, H 是输入平面的高度,以像素为单位 W 是像素的宽度。
参数说明:
| 参数 | 说明 |
|---|---|
in_channels
|
输入图像中的通道数:int |
out_channels
|
卷积产生的通道数 |
| kernel_size | 卷积内核的大小 |
| stride | 卷积的步幅。默认值:1 |
| padding | 将零填充添加到输入的两侧。默认值:0 |
| dilation | 内核元素之间的间距。默认值:1 |
| groups | 从输入通道到输出通道的阻塞连接数。默认值:1 |
| bias |
如果True,在输出中增加了可学习的偏差。默认:True
|
计算输出图片shape:
- 输入shape格式:
(N,Cin,Hin,Win)(N,C_{in},H_{in},W_{in}) (N,Cin,Hin,Win)
- 输出shape格式:
(N,Cout,Hout,Wout)(N,C_{out},H_{out},W_{out}) (N,Cout,Hout,Wout)
输出图片shape的计算公式:
Hout=⌊Hin+2×padding[0]−dilation[0]×(kernel_size[0]−1)−1stride[0]+1⌋Wout=⌊Win+2×padding[1]−dilation[1]×(kernel_size[1]−1)−1stride[1]+1⌋H_{out} = \bigg\lfloor\frac{\mathbf{H}_{\mathbf{in}}+2\times \mathbf{padding[0]}-\mathbf{dilation[0]}\times (\mathbf{kernel}\_\mathbf{size[0]}-1)-1 }{\mathbf{stride[0]}}+1 \bigg\rfloor \\ W_{out} = \bigg\lfloor\frac{\mathbf{W}_{\mathbf{in}}+2\times \mathbf{padding[1]}-\mathbf{dilation[1]}\times (\mathbf{kernel}\_\mathbf{size[1]}-1)-1 }{\mathbf{stride[1]}}+1 \bigg\rfloor Hout=⌊stride[0]Hin+2×padding[0]−dilation[0]×(kernel_size[0]−1)−1+1⌋Wout=⌊stride[1]Win+2×padding[1]−dilation[1]×(kernel_size[1]−1)−1+1⌋
变量:
- weight(Tensor) - 形状模块的可学习权重(out_channels,in_channels,kernel_size [0],kernel_size [1])
- 偏见(Tensor) - 形状模块的可学习偏差(out_channels)
实例代码:
import torchconv = torch.nn.Conv2d(1,3,2,1,0)print('conv.weight.size():\t',conv.weight.size())
print('conv.bias.size():\t',conv.bias.size())
print('conv初始化的weight数据:\n',conv.weight)
print('conv初始化的bias数据:\n',conv.bias)
输出:
conv.weight.size(): torch.Size([3, 1, 2, 2])
conv.bias.size(): torch.Size([3])
conv初始化的weight数据:Parameter containing:
tensor([[[[ 0.2753, -0.1573],[-0.4197, 0.1795]]],[[[ 0.1529, 0.3869],[ 0.0219, -0.2829]]],[[[ 0.3727, -0.1673],[ 0.4687, 0.3792]]]], requires_grad=True)
conv初始化的bias数据:Parameter containing:
tensor([ 0.2909, -0.0980, 0.0066], requires_grad=True)
反卷积方法的使用:torch.nn.ConvTranspose2d()
在由多个输入平面组成的输入图像上应用2D转置卷积运算符。
该模块可以看作Conv2d相对于其输入的梯度。它也被称为分数跨度卷积或反卷积(尽管它不是实际的去卷积操作)。
参数说明:
| 参数 | 说明 |
|---|---|
| in_channels | 输入图像中的通道数 |
| out_channels | 卷积产生的通道数 |
| kernel_size | 卷积内核的大小 |
| stride | 卷积的步幅。默认值:1 |
| padding |
零填充将添加到输入中每个维度的两侧。默认值:0kernel_size - 1 - padding
|
| output_padding | 在输出形状中添加到每个维度的一侧的附加大小。默认值:0 |
| groups | 从输入通道到输出通道的阻塞连接数。默认值:1 |
| bias |
如果True,在输出中增加了可学习的偏差。默认:True
|
| dilation | 内核元素之间的间距。默认值:1 |
计算输出图片shape:
- 输入:
(N,Cin,Hin,Win)(N,C_{in},H_{in},W_{in}) (N,Cin,Hin,Win)
- 输出:
(N,Cout,Hout,Wout)(N,C_{out},H_{out},W_{out}) (N,Cout,Hout,Wout)
输出图片shape的计算公式:
Hout=(Hin−1)×stride[0]−2×padding[0]+kernel_size[0]+output_padding[0]Wout=(Win−1)×stride[1]−2×padding[1]+kernel_size[1]+output_padding[1]\mathbf{H_{out}} = \mathbf{(H_{in}-1)}\times \mathbf{stride[0]} - 2\times \mathbf{padding[0] }+\mathbf{kernel}\_\mathbf{size[0]}+\mathbf{output}\_\mathbf{padding[0]} \\ \mathbf{W_{out}} = \mathbf{(W_{in}-1)}\times \mathbf{stride[1]} - 2\times \mathbf{padding[1] }+\mathbf{kernel}\_\mathbf{size[1]}+\mathbf{output}\_\mathbf{padding[1]} Hout=(Hin−1)×stride[0]−2×padding[0]+kernel_size[0]+output_padding[0]Wout=(Win−1)×stride[1]−2×padding[1]+kernel_size[1]+output_padding[1]
变量:
- weight(Tensor) - 形状模块的可学习权重(out_channels,in_channels,kernel_size [0],kernel_size [1])
- 偏见(Tensor) - 形状模块的可学习偏差(out_channels)
使用PyTorch实现CNN相关推荐
- Pytorch和CNN图像分类
Pytorch和CNN图像分类 PyTorch是一个基于Torch的Python开源机器学习库,用于自然语言处理等应用程序.它主要由Facebookd的人工智能小组开发,不仅能够实现强大的GPU加速, ...
- Pytorch之CNN:基于Pytorch框架实现经典卷积神经网络的算法(LeNet、AlexNet、VGG、NIN、GoogleNet、ResNet)——从代码认知CNN经典架构
Pytorch之CNN:基于Pytorch框架实现经典卷积神经网络的算法(LeNet.AlexNet.VGG.NIN.GoogleNet.ResNet)--从代码认知CNN经典架构 目录 CNN经典算 ...
- 卷积神经网络、比较MLPS和CNNS、滤波器、CNN各层的作用、在Pytorch可视化CNN
1.33.卷积神经网络 1.33.1.卷积 和 神经网络 1.33.1.1.比较MLPS和CNNS 1.33.1.2.计算机如何看图像? 1.33.1.3.建立自己的滤波器 1.33.2.完整的卷积神 ...
- MINIST深度学习识别:python全连接神经网络和pytorch LeNet CNN网络训练实现及比较(三)...
版权声明:本文为博主原创文章,欢迎转载,并请注明出处.联系方式:460356155@qq.com 在前两篇文章MINIST深度学习识别:python全连接神经网络和pytorch LeNet CNN网 ...
- 基于PyTorch搭建CNN实现视频动作分类任务代码详解
数据及具体讲解来源: 基于PyTorch搭建CNN实现视频动作分类任务 import torch import torch.nn as nn import torchvision.transforms ...
- Pytorch中CNN入门思想及实现
CNN卷积神经网络 基础概念: 以卷积操作为基础的网络结构,每个卷积核可以看成一个特征提取器. 思想: 每次观察数据的一部分,如图,在整个矩阵中只观察黄色部分3×3的矩阵,将这[3×3]矩阵·(点乘) ...
- 03.PyTorch与CNN(4-1 机器学习和神经网络的基本概念(1))
03.PyTorch与CNN(4-1 机器学习和神经网络的基本概念(1)) 一, 4-1 机器学习和神经网络的基本概念(1) 来自慕课网 一, 4-1 机器学习和神经网络的基本概念(1)
- 【深度学习基础】SENet——PyTorch实现CNN的SE结构改造
[深度学习基础][深度学习基础]SENet--PyTorch实现CNN的SE结构改造 1 论文关键信息 1.1 SE block 1.1.1 squeeze 1.1.2 Exitation 2 pyt ...
- 使用PyTorch搭建CNN神经网络
使用pytorch搭建CNN神经网络 卷积运算的基本原理 单层卷积运算 valid convolution same convolution CNN的基本结构 数据输入层 卷积层 池化层 全连接层 数 ...
- 基于pytorch使用实现CNN 如何使用pytorch构建CNN卷积神经网络
基于pytorch使用实现CNN 如何使用pytorch构建CNN卷积神经网络 所用工具 文件结构: 数据: 代码: 结果: 改进思路 拓展 本文是一个基于pytorch使用CNN在生物信息学上进行位 ...
最新文章
- 10 年 bloger 教你如何优雅玩转博客!
- 免费素材下载:Box Of Bundles Number 2
- Android实现支持缩放平移图片
- li连接mysql代码_php连接mysql基本代码-测试代码
- riskv的linux模拟环境,开启你RISC-V的开发之旅-RISC-V的linux模拟环境搭建整理和总结-EDA365电子论坛通信数码-人工智能-计算机-半导体-手机家电消费电子硬件门户网站...
- 远程下载pdf文件 java代码
- 正确的加密存储密码防止被拖库(脱裤)保护用户登录安全
- JavaScript将HTML元素导出PDF及World
- 大一学生《web课程设计》用DIV+CSS技术设计的个人网页(网页制作课作业)
- 抖音APP终极瘦身方案
- 笔记............................
- 搭建Discuz论坛网站-最新版Discuz3.4
- Cloudflare免费CDN加速及防护
- 嵌入式Linux C笔试题积累
- 上海python周末培训班_上海python周末班
- L3-031 千手观音 - java
- 苹果手机闹钟声音大小怎么调_电脑上什么便签备忘录软件可以像闹钟那样按时提醒我们做事?...
- ceres Analytic Derivatives
- 关于Spring的两三事:万物之始—BeanDefinition
- 使用可信科技的人脸识别活体认证遇到的问题
热门文章
- MD4 算法代码实现
- 2019最新高级JAVA架构师之路(价值3万元的教程-年薪百万计划)
- 使用Python解二元一次方程组
- oracle报03113,一条SQL查询,报ora-03113的错误,请高手分析
- c语言的按位取反运算符
- 全流程基于最新导则下的生态环境影响评价技术方法及图件制作
- unity3d 台球源码_基于Unity3d的桌球游戏的设计与实现
- Arcgis中按照cass标准分幅图框进行批量正射影像DOM分幅裁剪并命名
- oracle中文转全拼音,(转)oracle下,把中文转为拼音函数编写
- python opencv导入pbtxt文件出现错误Failed to parse GraphDef file