CGCS2000、WGS84以及ITRF问题的阐述
更多资讯见xiaok海洋测绘网
经过查阅资料以及请教专家,站长得出以下结论:
1、 WGS84经过了几次修正,WGS84(G1150)与ITRF2000对应,当前W G S -84 (G 1674 )与 IT R F08 在历元 2005.0 处一致;
2、WGS84不是一个严密的坐标系统,它缺少历元的约束,因此,说WGS84坐标应该是指某个历元的坐标,G1674以后观测所得到的WGS84坐标都是ITRF2008下的84坐标(观测时间);
3、CGCS2000是一个严密的坐标系统,ITRF97框架,2000.0历元。因此,当前WGS84坐标与CGCS2000在历元引起坐标上的差别不能忽略,差别在分米级;
4、ITRF00以后的框架差别较小,达mm级。
5、如何获取CGCS2000坐标(cm级精度):
1)使用地方CORS站,方便快捷;
2)使用IGS站联测,连续观测至少18小时,利用商业软件或者开源软件,下载IGS站同步观测数据、精密星历,进行基线解算;
3)通过坐标转换,利用公共点进行坐标转换或者利用ITRF公布的转换参数进行框架和历元
的转换,后者重点是历元转换,如何确定观测地的速度场是关键。
BJFS、WUHN,SHAO的CGCS2000坐标见下面的表。
数据获取网站:
当前WGS84(G1674)的坐标获取:
http://sopac.ucsd.edu/sector.shtml
ITRF框架的站点坐标获取,比例ITRF2008(2005.0)下的IGS坐标
http://itrf.ensg.ign.fr/ITRF_solutions/2008/more_ITRF2008.php
依据:
摘自赵忠海,蒋志楠,朱李忠等《W G S 一84 (G 1674 ) 与 C G C S2000 坐标转换研究》
WGS84(G1674):
目前 ,W G S 一84 主要由 N G A 负责维护。 W G S 一84 系统 由全球地心参考框架、地球重力场模型 、W G S 一84 水准面等组成,先后经历 了 4 次精化… ,前 3 次分别为 W G S 一84 (G 730 ) 、W G S 一84 (G873 ) 、W G S一 84 (G 1150 ) ,其 中“ G ”表示完全采用 G PS 方法确定,后面数字表示 G PS 周数 ,最新一次精化在 20 12 年 2 月 8 日,标号 W G S 一84 (G 1674 ) 。 此次精化后 ,W G S 一84 (G 1674 )与 IT R F08 在历元 2005.0 处一致。 目前 G PS 测量定位中,若采用广播星历 ,则定位结果(单点定位或相对定位 ) 属于 W G S 一84 (G 1674 ) 坐标系 下 当前历元。
CGCS2000:
2000 国家大地坐标 系(C G C S2000 ) 是我 国 目前正在推广并使 用 的新一代 大地 坐标 系, 属 于 ITR F97 框 架 、2000 .0 历元 、三维地心坐标 系统。它所采用的参考椭球赤道半径 、地球 自转速度ɑ、地心引力常数 G M 均与W G S-84-致 ,椭球扁率, 存在的微小差异,仅在赤道上导致 1 毫米误差 ,可以认 为 G C G C2000 坐标和 W G S-84(G 1150 ) 坐标是一致的.
结论:
我们看到 W G S-84 (G 1674 ) 与 C G CS2000 两者的参考椭球已经趋于一致,其 主要差别是历元和参考框架的不一致 ,而这里又以历元导致的差别明显, 由当前历元转换至 2000 .0 历元,就 E333 而言 ,根据速度场推算有32 em 的空间位移 ,从表 2 中也可 以看出,平移参数矢量达 到 了 33cm , 两 者 之 间数 量 上 基 本- 致 , 说 明
W G S-84 (G 1674 ) 与 C G CS2000 之间主要 因板块运动导致测 站位 置变化 。
W G S-84 (G 1674 ) 坐标与 CG C S2000 坐标存在分 米级 的 差 别 , 利 用 重 合 点 进 行 W G S-84 (G 1674 ) 与C G C S2000 坐标转换模型参数求解 ,可 以获得厘米级或者更高的精度,在精度要求不高的情况下 ,可以利用速度场模型直接进行改正。
魏子卿《2000中国大地坐标系及其与WGS84的比较》:
扁率变化及WGS84(G1150)
1)df不引起大地经度变化;
2)df引起大地纬度的变化范围为0(赤道和两
极至0.105mm(B= 45°);
3)df引起大地高的变化范围为0(赤道)到0.105mm(两极);
4)df引起椭球面上正常重力的变化范围为0(两极)到0.016× 10- 8ms- 2(赤道)。
显见,在当前的测量精度水平(坐标测量精度1mm,重力测量精度1× 10- 8ms- 2),由两个坐标系的
参考椭球的扁率差异引起同一点在WGS84和CGCS2000坐标系内的坐标变化和重力变化是可以忽略的。
与CGCS2000通过空间网点的坐标和速度实现相仿,WGS84通过GPS监测站坐标实现,监测站坐标用来计算GPS的精密星历。 1987年建立的初始WGS84参考框架是通过NNSS或TRANSIT(Doppler)站坐标实现的[5],站坐标相对BTS(BIH地球系)存在1~ 2m的不确定度,后来还发现椭球高度存在系统偏差。为了维持框架的精确性和稳定性,1994、1996和2002年WGS84又先后进行3次实现[5,8],即对GPS监测站的坐标进行3次更新,以使框架对准ITRF。使用的基本方法是,通过联合处理GPS监测站和IGS站的测量数据,解算GPS监测站的坐标,在处理中对IGS站的ITRF坐标施以强约束。以最近(2002)一次实现为例,参与处理的数据包括17个GPS监测站(其中6个USAF(美国空军)站,11个NGA(国家地球空间情报局)站)和49个IGS站在2001年2月14— 28日期间的GPS数据(和气象数据),处理中将IGS站的ITRF2000坐标
(用站速度将坐标从参考历元1997.0归算至观测期间)加以固定[8]。
WGS84的3次实现得到的框架,依次叫做WGS84(G 730)、WGS84(G 873)和WGS84(G 1150),
这里“G”指示GPS测量数据被用来得到站坐标,在“G”后面的号码指示新的站坐标开始用于计算精密星历的GPS星期号。最新框架WGS84(G 1150)由17个GPS监测站在历元2001.0的坐标和速度来体现。WGS84(G 1150)的估计精度是:每个监测站的每一坐标分量的精度为1cm量级(1倍标准差)[8](作为比较,WGS84(G 730)和WGS84(G 873)的精度分别为10cm和5cm[8])。与ITRF的符合情况是:在7参数调整和考虑历元差异之后,WGS84
(G 1150)与ITRF2000的RMS差为每分量1cm;参考于WGS84(G 1150)的NGA GPS精密星历与参考于ITRF2000的IGSGPS精密星历的随后比较,证实两个参考系是一致的。
鉴于在坐标系定义和实现上的比较,我们可以认为,CGCS2000和WGS84(G 1150)是相容的;在坐标系的实现精度范围内,CGCS2000坐标和WGS84(G 1150)坐标是一致的。
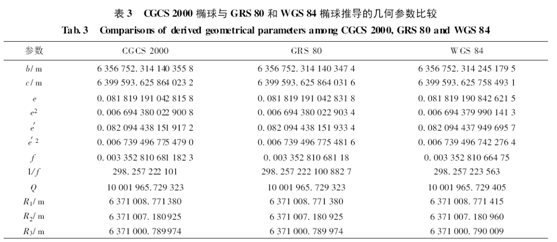
程鹏飞等《2000国家大地坐标系椭球参数与GRS80和WGS84的比较》:
CGCS2000、ITRF和WGS84的参考椭球:
摘自成英燕等《基于现框架下的省市级CORS站到CGCS2000的转换》
BJFS的CGCS2000坐标及速度场模型的选取:
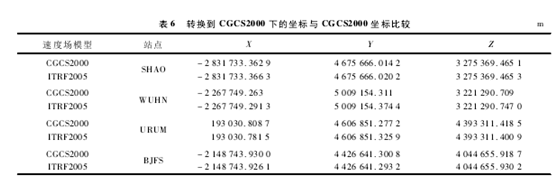
CGCS2000 表示 IGS 站在 CSCS2000 下的已知坐标,ITRF2005 表示由 ITRF2005 框架 2009 年 5 月11 日 历 元 下 IGS 站 坐 标 用 上 述 方 法 转 换 到CGCS2000 下的坐标。从两者比较看,乌鲁木齐位于板块划分中所确定的变形区域,由于这个区域我国提供给 IGS 用于确定速度场的数据严重不足,因此模型的精度不高,转换后的精度比较差,接近于分米,位于这个区域的昆明站的速度场也较差,因此后续进行转换还需建设高精度的板块运动模型。
为实际应用的方便,在此还讨论需转换的地方CORS 站在多大范围内可用附近的 IGS 站的速度场代替实施转换。测站的速度与测站所处的位置有关。这就相当于,如果测站的坐标在 IGS 测站周围 ±3°范围内所计算的测站位移速度与 IGS 站的基本上相同,若在不知道测站速度场的情况下,且测站与 IGS 测站在同一个板块内且此板块属于严格的板块,则测站的速度可以取 IGS 的速度,进行测站坐标的转换。
结论:
我国目前还没有建立足够密度的国家级 CORS站,现框架现历元下的 CORS 站的转换主要依赖于板块运动模型及我国已有的 IGS 站的速度场信息。国外各板块运动模型构造时均未包括中国 CORS 的观测数据,未考虑中国西部区域的运动特性,建立的模型在上述变形区域所计算的速度场是不准确的,尤其在变形区域差异较大。实用中常采用 IGS 站的速度场信息,但在我国目前除 BJFS、SHAO、WUHN 的速度场可以直接应用外,其他的 IGS 站均在板块的变形区域,速度场信息不可靠,而对于变形区域可采用坐标转换或基线网平差的方法进行转换。
国家测绘地理信息局现代测绘基准基础体系基础设施建设一期工程项目将建成 360 个连续运行站,可建立高精度的速度场模型及板块运动模型,解决已建及新建 CORS 及我国区域内任 何 地方GNSS 定位结果的严密转换问题。
以下内容摘自刘立等《坐标框架转换若干问题的研究》:
ITRF间的差别:
从以上各表和图中可以看出 : 在 ITRF96 和ITRF97 中 x 坐标分量相差 (1 cm~3 cm) , y 坐标分量相差 (1 cm~2 cm) , z 坐标分量相差在 1 cm之内 ;在 ITRF97 和 ITRF00 中 x 坐标分量相差 (1cm~2 cm) , y 坐标分量相差 (1 cm~2 cm) , z 坐标分量相差在 1. 5 cm 之内。 在 ITRF00 和 ITRF05中 x 、y 、z 坐标分量相差毫米级。 ITRF96 、ITRF00和 ITRF05 的中误差几乎相同 , ITRF97 的中误差相对比较大些 ,所以 ITRF96 、ITRF00 和 ITRF05的精度基本相同 ,而且 ITRF05 解算的结果已达到毫米级的精度。
尹业彪《基于连续观测站的 2000 国家大地坐标获取方法研究》:
获取CGCS2000的方法:
(1)通过平差方法将 GPS 网纳入到 2000 国家大地坐标系统;
(2)通过公共点求解转换参数进行置换;
(3)按已公布的 ITRF 框架之间的转换方式进行置换。
上述方法(1)是我国 GPS 控制网,由 WGS84 坐标系向工程坐标系或北京 1954 年坐标系和 1980西安坐标系转换的一种通用方法。但该方法要求施工者至少有两个控制点的目标坐标系的坐标,而且要保证一定的精度才能实现整个控制网的精度。在这种情况下,控制网施工单位或个人往往是通过向国家测绘成果主管部门申请、购买,并且要与测绘主管部门签属相关的保密协议。这种方式,不仅耗时而且会对增加施工成本。以一个 D 级控制网为例,控制网施工者往往会购买测区周边 3 个国家 C 级控制点成果,按陕西省测绘局成果价格计算,C 级 GPS 国家控制点平面位置 600 元/个,高程控制点200 元/个,一个 C 级三维点为 800 元,3 个点要 2400 元。这对小型生产活动,是一笔较大的生产投入。
方法(2)使用的前提是源坐标系统和目标坐标系都要有保持一定高的精度,这样求算的参数才具有一定的精度,此外,还需要被转换的原始坐标点在源坐标系内具有较高的精度。在执行起来,较大难度。可操作性不强。
方法(3)是根据 CGCS2000 的定义,结合各坐标框架及历元经过一系列转换实现的。使用该方法必须解决如下几个核心问题即当前历元下测区内控制点的坐标、当前坐标框架和目标框架之间的转换参数、当前测区的速度场。只要满足上述条件,个人完全有能力实现 CGCS2000 坐标。该方法也是国家测绘地理信息局推荐的一种转换方法。当前从 IGS 站所能获得的精密星历一般是 IGS05 或 IGS08 星历,其对应的参考框架分别是 ITRF05 和 ITRF08。卫星星历决定了定位成果所处的参考框架,当前参考框架下的测绘成果向 CGCS2000 转换时,其实质是当前参考框架向 ITRF97 转换。
结论:
(1)通过将测区内 GPS 控制点与 IGS 站联测,使用 GAMIT 软件对观测数据组网解算,能够得到满足国家 GPS 大地控制网点精度的坐标。测绘单位可以以很小的投入,获得施工区域内各控制点的 CGCS2000 大地坐标。
(2)测绘成果的精度与观测时长和 Logistic 曲线关系,当观测时长超过 14 个小时时,精度会有一个明显的提高。若要获得满足国家 GPS 大地控制网点精度的 CGCS2000坐标,观测时长应不低于 18 小时。
(3)对流层对 GPS 信号有干扰作用,当卫星截止高度角设置过低时,不仅不能提高观测精度,反而会降低观测精度。当卫星截止高达到或超过 15 度时,可以有效的减弱对流层对 GPS 信号的干扰,当卫星截止高度达过大时,会间接影响 GPS 观测精度。因此,GPS 接收机的卫星截止高度既不宜过低也不宜过过,15 度是一个较为适宜的角度。
任何一次测量都有误差的,在 GPS 网控制点有误差时,适当扩大 GPS 网内各控制点的空间距离可以有效减弱因控制点误差引起的整网误差。满足“国标” D 级精度的 GPS 控制网,网内各控制点间距不宜小于 4200 m 。除用一些 GPS 专用质量指定指标考查 GPS 网精度,用传统地面测量误差传播理论及误差限,可以对 GPS 网质量进行相关的质量评价。为减小因不同时期站台速度值差异问题,应取数据采集时附近 IGS 站的即时速度值与该站 2000.0 历元时刻速度值的平均数作为测站的瞬时站台速度值。
CGCS2000、WGS84以及ITRF问题的阐述相关推荐
- cesium加载cgcs2000\wgs84坐标系解决方式
关于cesium加载cgcs2000\wgs84坐标系的切片,两种解决方式: 1-修改cesium的源码, 2-使用代理,转发发布的源切片. 更多文章请关注公众号查看!
- 【GNSS学及天体学名词】GNSS,天体学名词
GNSS ICRS: 国际天球参考架(质心是太阳系中心,是稳定不动得框架) ITRF: 国际地球参考架(质心是地球中心,地球外观看随地球一起旋转) ITRS: 国际地球参考系 WGS-84坐标系:GP ...
- Proj4.js wgs84与cgcs2000坐标转换示例 中央经线计算
1.js源码:https://github.com/proj4js/proj4js 2.引用包中dist/proj4.js文件 3.//根据自己的坐标系参数定义 proj4字符串 v ...
- WGS1984与ITRF框架
1. WGS84 转载地址:https://baike.baidu.com/item/WGS84/4380144?fr=aladdin WGS84:World Geodetic System 1984 ...
- 坐标转换参数求取的若干问题
摘 要:不同坐标系下的测量成果需要相互统一,统一的方法是进行坐标转换,而坐标转换的实质是转换参数的求取.本文针对坐标转换中转换参数的初值计算问题.转换参数的精度问题及转换参数的求取方法三个方面进行讨论 ...
- python实现2000投影坐标转经纬度
引言 常用的WGS84投影坐标转经纬度可用通用的pyproj库来转换,而2000坐标 测试用这个库是没法转换的 而WGS84和其它坐标系(gcj02.bd09)之间的转换可以通过ChangeCoord ...
- 太乐地图下载器 V5.0.5 破解版
博主今天给大家带来太乐地图下载器 V5.0.5 破解版 需要的小伙伴下载使用哦:http://download.csdn.net/download/shujujiegougou/9514304?utm ...
- GGGIS地图下载器|手把手教你如何免费下载天地图和谷歌的卫星影像图以及街道地图
一.软件下载 GGGIS官方下载网址:http://www.gggis.com/sj 点"绿色免安装版本"下载软件程序到本地,解压,双击"GGGIS地图下载器.exe&q ...
- 利用Qt+GDAL库制作经纬度坐标转换工具
1.功能界面 下面是用Global Mapper计算的结果,证明计算正确. 2.功能介绍 支持CGCS2000/WGS84/XIAN80/BEIJING54四种常用坐标系: 自动判断输入经纬度和X/Y ...
最新文章
- G - 数据结构实验之排序七:选课名单
- 如何加快Vivado的编译速度
- stl中unordered_map 和 map的区别 ?
- [自己动手]让Editplus更好用
- 第三课——MFC编程
- 【bfs】WJ的逃离
- [html] html的开始与结束标签嵌套错误会导致哪些问题?
- Vue.js 概述与 MVVM 模式
- NHibernate Inheritance Mapping 继承映射
- Linux通过UUID挂载和卸载硬盘
- 北航计算机组成原理课程设计-2020秋 PreProject-Logisim-Logisim组合逻辑电路
- 手机管家中的黑名单功能
- 计算机固态硬盘装系统,固态硬盘如何装系统
- 为什么计算机中整数的范围是-32768~32767而不是-32767~32767
- 大数据发展趋势十个大方向
- 安装mysql报msvcr100_解决安装mysql 提示msvcr100.dill 丢失,的最快方法
- IOS 安卓双平台视频APP推荐-VIP
- 云服务器更新系统,云服务器能更新系统吗
- 大计基编程题(第十二周)
- 从浏览器下载表格数据为Excel的两种实现方法