戴森工程师揭秘Dyson 360 Eye吸尘机器人的故事:先要做到“智能”
在5月8日这天,戴森在北京正式对外宣布,智能吸尘机器人Dyson 360 Eye在中国问世。消息一出,业界的疑问也冒了出来:“早在 2014年就开始在欧洲和日本发售的Dyson 360 Eye,实际上算不上一款‘新品’,为什么迟到于中国市场?”。为此,笔者在现场与来自Dyson英国总部的两位工程师聊了聊,得到了一些关于戴森吸尘机器人背后的故事。
之所以推迟了投放市场的时间,戴森资深机器人工程师Mike Aldred(迈克·阿尔德雷德)回答说,是因为考虑到中国客户对于吸尘机器人的需求,戴森的研发团队花了很长时间把Dyson 360 Eye做了改善,大到清洁模式的把握,小到机身的宽刷条,甚至中国家庭高度抛光的地板,尽量让这款产品更“local”(接地气)。更本地化的是,戴森专门在上海开了一家新的研究机构,物色软件工程师,为的就是迎合中国市场需求。
听到这里,笔者不由得想起在去年,当戴森公司发布首款吹风机时,不惜购买一千英尺的“真头发”用来测试,耗时四年,总研发支出高达7200万美元。这一切花销,仅仅为了制造出了一个功能性略强、售价却过高于市面其他产品。尽管如此,我们却不得不承认,这一直是戴森成功的方式:大量投资研发,制造昂贵又有竞争力的产品,没人能说这种方式没用。
据戴森公开资料显示,公司的总销售额在过去六年中翻了一番,并且在2016年达到了20亿英镑(24.3亿美元),这个成绩,亚太地区功不可没——截至2015年,亚太市场一直是公司最大的利润来源。因此,过去几年里,戴森扩大了产品线,更新了基础设备,加大研发投资,公司目前采用了能在真空管中完成工作的电机技术,并将这项技术用于无叶片风扇、加热器、加湿器、净化器、吹风机和这款真空吸尘器Dyson 360 Eye。
 戴森资深机器人工程师Mike Aldred(迈克·阿尔德雷德)
戴森资深机器人工程师Mike Aldred(迈克·阿尔德雷德)
当然,这款真空吸尘器要做到“智能”,远不止这些。
对于智能吸尘机器人的定义,发明家兼戴森创始人詹姆斯•戴森爵士这样认为:“每个家庭的室内环境都不同,家中的每个房间也有差异,吸尘机器人需要像人类一样思考:实时观察周围环境,作出决策,实现便捷高效的清洁。”
因此19年之前迈克·阿尔德雷德加入公司的时候,詹姆斯•戴森给了他一个艰巨的任务,创造一个高性能的吸尘器。这个任务的难度在于,并非先创造一个机器人,再附上吸尘器,而是让吸尘器有特别智能的导航。
好在戴森公司和迈克·阿尔德雷德早已克服了这些难题。从事机器人技术开发17年以来,戴森公司每周投资700万英镑用于研发,涉及固态电池、人工智能、机器学习、视觉技术等新技术。仅Dyson 360 Eye,就已经投入了200名工程师、420项专利和2800万英镑。
迈克·阿尔德雷德说,开发一个智能的吸尘器,需要特别注意四个方面:一是强大的吸力,二是高效的过滤,三是强劲的识取能力,第四是智能的导航。
这些细节放大到Dyson 360 Eye就有一个直观的体验。外观设计上,这款产品和戴森大多数产品类似,延续了“技术宅”的风格,在中国提供蓝、紫粉两种配色。机身娇小,宽度23厘米,更方便出入屋子里的犄角旮旯。
最重要的部分在于内置戴森专利第二代数码马达,据说由Dyson内部工程师花了近十年时间完善,旋转速度每分钟78000转,吸入率22安瓦——一般市面上我们常见的扫地机的马达吸入率只有1安瓦,相较而言,1安瓦的摄入率和电脑上冷却吹风扇的马力是一样的,所以20倍的吸力完全可以称作真空吸尘器。
与一些机器人依靠传感器来确定在室内的行进路线不同,Dyson 360 Eye的特色在于,采用360度全景视觉技术,可以全方位识别当前位置、已清洁区域和未清洁区域。识别之后,Dyson 360 Eye可以开始制订详细的地面计划,通过顶部所搭载的那颗摄像头以及传感器,配合即时定位与地图构建(SLAM)技术,它能够以30帧/秒拍摄出周围环境的视频,从而获知自身定位、已清扫/未清扫区域。同时利用机身前方的红外传感器,可以探测前方最远15厘米以内的障碍物,从而进行智能清洁。
用视觉导航代替超声波和红外线传感器,是戴森经过十几年研究所得的解决方案。后者会导致机身太大、太重、生产成本昂贵,对比而言,视觉导航不仅克服了以上难题,而且视野更广。
视觉导航的优势让戴森团队意识到摄像头对吸尘器产品的重要性。早在2014年,戴森就和伦敦帝国理工学院联合创办机器人的实验室,研究下一代的机器人和视觉系统,并表示将会植入到今后戴森的产品当中。
关于它的摄像头,现场提出了两个问题。一是在光线较暗的条件下是否能正常工作;第二,它是否会将拍摄到的照片发送回戴森后台,导致用户隐私泄露。
迈克·阿尔德雷德回答说,Dyson 360 Eye设计是可以在暗光下工作的,比如在桌子底下灯光很暗,机身旁边两个红外线的曝光器会帮它侦测,同时还可以照相。它拍摄的照片将会存储在本地,并不会出现信息回传的问题。
具体到工作原理,戴森不惜增加机身高度,也坚持要使用专利“多圆锥气旋集尘技术”。这项技术在戴森之前很多的产品中都用到过,它通过使用涡流分离或空气运动,将颗粒物从空气中分离,并利用高速气流通过气旋将灰尘甩入集尘筒内。“正因为这个多圆锥气旋集尘技术,结合HEPA过滤系统,可以过滤99.97%、小至0.3微米的颗粒以及过敏原,包括花粉、霉菌或细菌。”迈克·阿尔德雷德说。

Dyson 360 Eye现场清洁,中间区域为已清洁区域
Dyson 360 Eye采用了与整台机身等宽的“清洁刷条”,碳纤维+尼龙的刷毛材质,加上超强吸力,从而达到深入清洁的目的。
取缔传统的轮式,Dyson 360 Eye采用对不同地面环境适应性更好的“一体式坦克履带”——“有了一体式履带以后,机器人就可以跃过不同的地形,就算加重有门槛的话它也可以攀爬跃过。”迈克·阿尔德雷德说。
这款机器的电池容量为5300mAh,官方称充电时间为 2 小时 45分钟。满电情况下,强效模式可以工作45 分钟,安静模式为 75 分钟,可以持续自动监测电池电量,并且进行自主充电。
利用Dyson Link应用程序,可以远程控制开关、调节清洁模式、规划清洁日程、监控机器人等操作。戴森全球产品总监约翰·丘吉尔(John Churchill)表示,新功能也会通过应用程序更新直接触达用户。

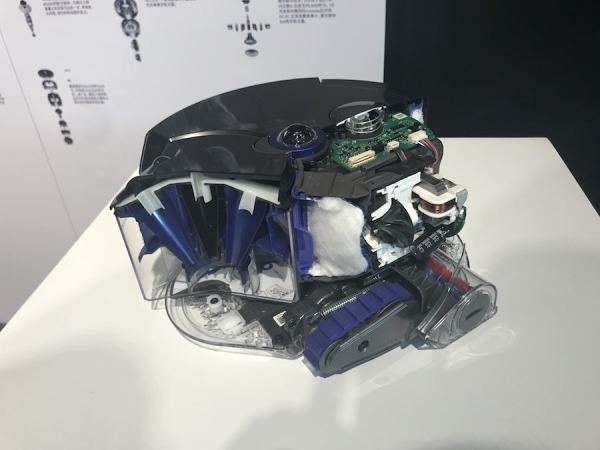
图为戴森全球产品总监约翰·丘吉尔(John Churchill)讲解Dyson 360 Eye工作结构,图下区域是机器运行当中的图像,图上是机器的路径规划,黄色线条代表机器去过的地方,蓝色线条是机器之后规划要去的地方。图中的方块和圆圈是用来追踪房间环境。
目前Dyson 360 Eye售价6490元,购买渠道包括戴森官网、天猫、京东等电商平台或者线下体验店。
戴森工程师揭秘Dyson 360 Eye吸尘机器人的故事:先要做到“智能”相关推荐
- 什么叫小米粒吸尘机器人_2020年,吸尘器推荐选购,家用吸尘器什么牌子好?扫地机器人推荐,吸尘器选购避坑指南!...
我是 @种草达人 ,专注研究各种好物五年之久,欢迎关注我. 想要告别吸尘器选择困难症,挑选到自己心仪的吸尘器,大家看这篇文章就够了- 更多好物种草系列推荐:吸尘器/扫地机器人.骨传导耳机 接下来我们就 ...
- 什么叫小米粒吸尘机器人_【诉说心声】德国克林斯曼全自动吸小米粒小石头怎么样?老铁诉说使用全过程 | 智能扫地机器人评测...
[诉说心声]德国克林斯曼全自动吸小米粒小石头怎么样?老铁诉说使用全过程操作简单 千帕吸力 电池耐用 上个月在市场上面了解了下怎么样,当时超出了我的预算,没有入手,这个月活动,果断入手了,对于很多人最关 ...
- smzdm 扫地机器人_Dyson 360 EYE扫地机器人评测:这次的黑科技是否值得拥有?
Dyson 360 EYE扫地机器人评测:这次的黑科技是否值得拥有? 2017-05-24 20:30:44 123点赞 164收藏 149评论 半分钟看重点 前言:我为什么会买 上个星期打开几个购物 ...
- linux系统万能播放器下载,360万能播放器Linux版
360万能播放器Linux版是一款十分不错的播放器,它可以帮助用户轻松播放出各种格式的音视频文件,所以喜欢看视频的用户,快来下载试试吧! 软件介绍 360万能播放器Linux版是一款在Linux系统上 ...
- 360进程管理器原理
看了360进程管理器,可以查看正在运行程序所依赖的动态库文件.但是我想把依赖的文件都提取出来,就写了下面的小程序. private void button1_Click(object sender, ...
- 機器人學總結(4) —— 逆運動學
0.前言 逆運動學,是通過操作空間(笛卡爾空間)的位姿,求解關機空間的關節參數的過程.把它放在雅克比後面,是因為有些逆運動學算法需要用到雅克比矩陣.處理逆運動學的方法很多,我們這裡介紹一些常用的方法. ...
- 人工智能 java 坦克机器人系列: 强化学习_人工智能 Java 坦克機器人系列: 強化學習...
級別:中級 2006 年 7 月13日 本文中,我們將使用強化學習來實現一個機器人.使用強化學習能創建一個自適應的戰斗機器人.這個機器人能在戰斗中根據環境取得最好的策略,並盡力使戰斗行為最佳.並在此過 ...
- 科沃斯擦窗机器人擦不干净怎么办_家用自动擦玻璃机器人哪种好呢?玻妞和科沃斯擦窗机器人能干净吗...
原标题:家用自动擦玻璃机器人哪种好呢?玻妞和科沃斯擦窗机器人能干净吗 现在家居格局同,窗户是各个房间不可缺少的部分,阳光的亮度和温度透过窗户投进室内,外面的世界也在窗户中定格,为了保持窗户的通透性,擦 ...
- YTU 2887: D--机器人Bill
2887: D--机器人Bill 时间限制: 1 Sec 内存限制: 128 MB 提交: 112 解决: 22 题目描述 最近,Dr. Jiang 新设计一个机器人Bill.Bill很聪明,会做 ...
最新文章
- 通过组策略和注册表关闭win7 UAC。
- .Net Discovery 系列之九--string从入门到精通(勘误版下)
- layui 表格新增删除一行
- 成功解决IndexError: shape mismatch: indexing arrays could not be broadcast together with shapes (100,)
- lisp正负调换_坐标提取lisp程序
- 病毒c语言代码大全,谁有C语言编写的病毒源代码?
- android.os.log,android.os.Handler和java.util.logging.Handler之间的区别?
- 【Qt】QTableView中嵌入复选框CheckBox 的四种方法总结
- mybatisplus报的mysql错误归纳
- PHP搭建IDC网站,SWAPIDC系统完整移除云平台修改版 个人搭建idc空间商网站平台
- Share:思科模拟器 路由配置(默认、静态、动态RIP)
- 各地“十四五”规划促智能网联新发展 | 政策解读系列
- php 车牌号限号,机动车限行尾号今天起轮换 周一至周五分别限行 4 和 9、5 和 0、1 和 6、2 和 7、3 和 8...
- 在html中制作多彩照片墙,60个照片墙布置方案 记录浪漫时刻
- C++:缺省参数是怎样设置的?
- Android控件绑定menu键
- [生存志] 第20节 历代大事件概览 隋朝
- 激光雷达与自动驾驶详解
- 一元二次方程求解(C语言版)
- coco数据集大小分类_VOC、COCO数据集类别