[DeFRCN] Decouple Faster R-CNN for Few-Shot Object Detection(ICCV 2021)
1. Motivation
本文基于Transfer-Learning Based 以及 Faster R-CNN进行改进。
本文针对分类和回归任务中存在的矛盾点进行分析:
- In this paper, we look closely into the conventional Faster R-CNN and analyze its contradictions from two orthogonal perspectives, namely multi-stage (RPN vs. RCNN) and multi-task (classification vs. localization).
2. Contribution
本文关于网络结构的2个创新点, Gradient Decoupled Layer用于多阶段的解耦,Prototypical Calibration Block用于多任务的解耦。
其中GDL是针对backbone,来解耦之前层和后面层;而PCB则是offline的prototype的分类层,用于boost原有的分类层。
- We look closely into the conventional Faster R-CNN and propose a simple yet effective architecture for few-shot detection, named Decoupled Faster R-CNN, which can be learned end-to-end via straightforward fine-tuning.
- To deal with the data-scarce scenario, we further present two novel modules, i.e. GDL and PCB, to perform de- coupling among multiple components of Faster R-CNN and boost classification performance respectively.
- DeFRCN is remarkably superior to SOTAs on various benchmarks, revealing the effectiveness of our approach.
3. Method
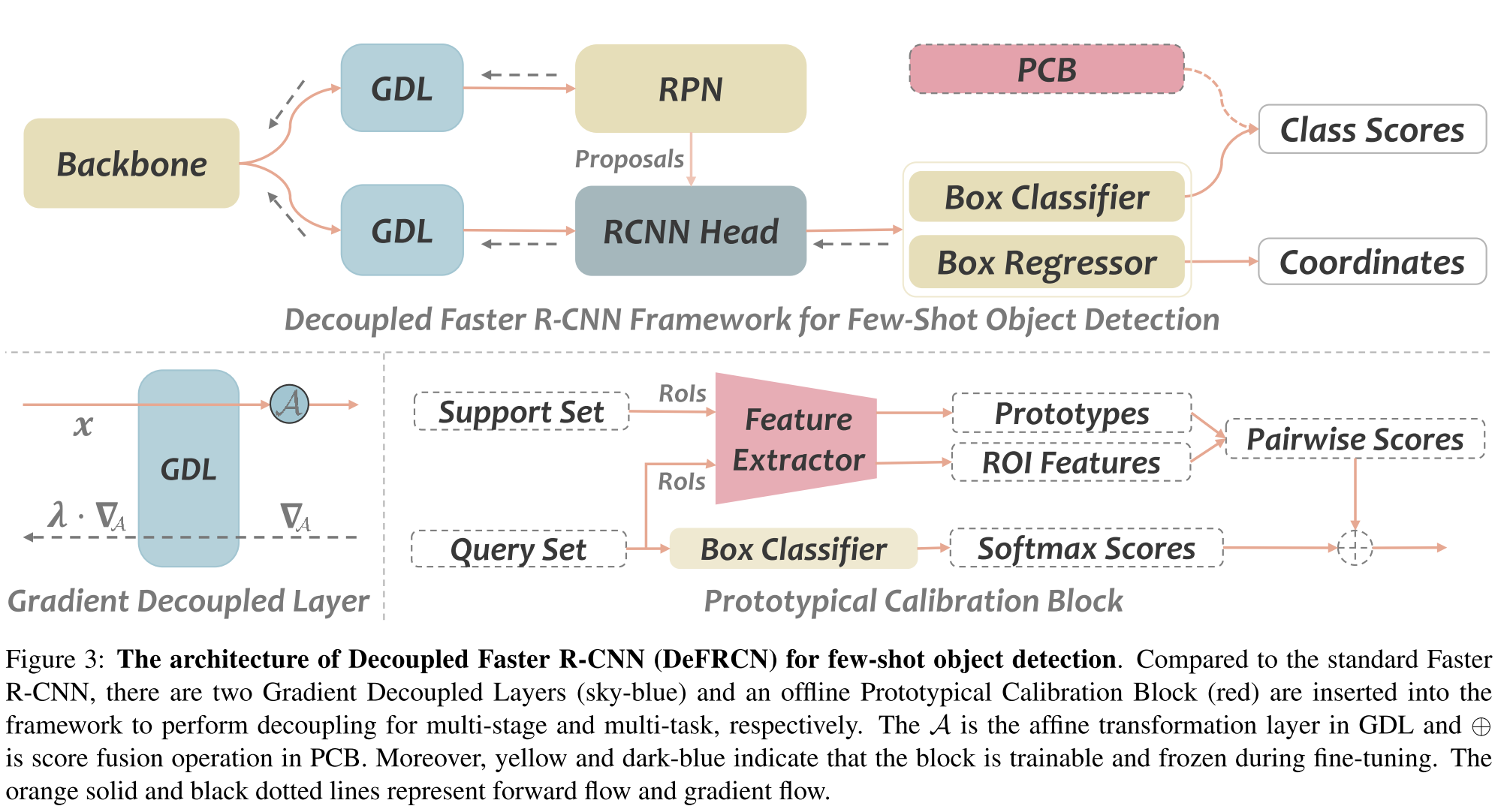
Backbone、RPN、Box Classifier以及Regressor在fine-tune阶段是trainable,而RCNN是frozen的。
Problem of multi-task learning
作者认为对于多任务学习来说,子网络的优化目标存在不一致性。
RPN是where to look, RCNN是what to look
classification head需要translation invariant features,而localization head 需要translation covariant features。
因此,可能导致一个suboptimal solution
Problem of shared backbone
由于Backbone的梯度回传和RCNN以及 RPN有关,但是这2者有一定的矛盾性,因此,作者认为这可能会导致FSOD性能的下降。并且在FSOD中,第二阶段的RPN会受到更多的前景-背景的混淆问题foreground-background confusion。因此可能造成对于base classes过拟合梯度的传播,到backbone以及RCNN
- which means a pro- posal that belongs to background in the base training phase is likely to be foreground in the novel fine-tuning phase
3.1 Gradient Decoupled Layer
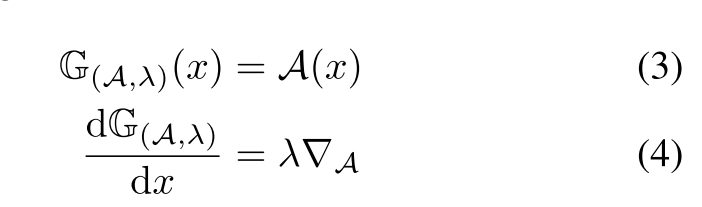
Perform Decoupling with GDL

Optimization with GDL

![]()
![]()
3.2 Prototypical Calibration Block
对于PCB提出的动机:
本文注意到few shot 分类分支产生了很大部分低质量的分数,这驱使我们来消除高得分的FP以及修正低分数的正样本。
- We notice that the under-explored few-shot classification branch generates a large amount of low-quality scores, which motivates us to eliminate high-scored false positives and remedy low-scored missing samples by introducing a Prototypical Calibration Block (PCB) for score refinement.
PCB的组成是classifier、RoIAlign、prototype bank。
给定M-way K-shot 任务的support set S,PCB提取了原始的图片特征图,然后直接使用对于GTbox的RoIAlign操作(类似Attention RPN那篇的操作),这样就可以得到对于MK instance的特征表示。这样我们构建一个prototype bankP=pcc=1MP= {p_c}^M_{c=1}P=pcc=1M,其中对于每一个类别c的prototype的公式如下:

其中subset S只包含某一个类别的所有instance的集合。
给定一个proposal y^=(ci,si,bi)\hat y =(c_i, s_i, b_i)y^=(ci,si,bi) ,这个proposal就是Faster R-CNN原有分支中fine-tune阶段得到的特征,c是label,s是score,b是box;PCB首先使用RoIAlign在bib_ibi上,接着对应xix_ixi以及pcip_{c_i}pci应用余弦相似度。
![]()
然后使用weight aggregation进行加权:
![]()
由于PCB是offline的结构,因此它即插即用,并不会对网络的训练造成很大的开销。并且PCB和proposal的分类分支不贡献参数。
- Further- more, since the PCB module is offline without any further training, it can be plug-and-play and easily equipped to any other architectures to build stronger few-shot detectors.
因此,我认为总体而言,这篇DEFRCN,它是对于meta-learning以及transfer-learning的融合,使用Transfer-Learning的总体框架,但是对于分类任务的问题上,他们使用support set 进行一个weight reweighting的融合的操作;不过它还对于backbone的特征的反向进行了修改,尽可能区分分类中的平移不变性以及回归问题的平移协变(covariance)性质。
4. Experiment
4.1.1 VOC
![]()
4.1.2 COCO
![]()
4.1.3 COCO to VOC
![]()
4.2 Ablation Study
4.2.1 Effectiveness of different modules
![]()
4.2.2 Effectiveness of the degree of decoupling
This observation prompts us to perform stop-gradient for RPN and scale-gradient for RCNN in DeFRCN
![]()
4.2.3 Can GDL boost conventional detection?
![]()
[DeFRCN] Decouple Faster R-CNN for Few-Shot Object Detection(ICCV 2021)相关推荐
- Faster R CNN
Faster R CNN 3 FASTER R-CNN 我们的Faster R CNN 由两个模块组成,第一个模块是 proposes regions 的全卷积网络,第二个是使用 proposed r ...
- Single shot object detection SSD using MobileNet and OpenCV
微信公众号:小白图像与视觉 关于技术.关注yysilence00.有问题或建议,请公众号留言. 主题:Single shot object detection SSD using MobileNet ...
- Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks(更快的RCNN:通过区域提议网络实现实时)
原文出处 感谢作者~ Faster R-CNN: Towards Real-Time Object Detection with Region ProposalNetworks Shaoqing Re ...
- 目标检测(Object Detection)综述--R-CNN/Fast R-CNN/Faster R-CNN/YOLO/SSD
1. 目标检测 1.1 简介 如何理解一张图片?根据后续任务的需要,有三个主要的层次. 一是分类(Classification),即是将图像结构化为某一类别的信息,用事先确定好的类别(string)或 ...
- 深度学习论文阅读目标检测篇(三):Faster R-CNN《 Towards Real-Time Object Detection with Region Proposal Networks》
深度学习论文阅读目标检测篇(三):Faster R-CNN< Towards Real-Time Object Detection with Region Proposal Networks&g ...
- 目标检测经典论文——Faster R-CNN论文翻译:Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Net
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Faster R-CNN:通过Region ...
- 《Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks》论文翻译
原文:https://arxiv.org/abs/1506.01497 Faster R-CNN: Towards Real-Time ObjectDetection with Region Prop ...
- ICCV 2021 | 国科大提出首个CNN和Transformer双体主干网络!Conformer准确率高达84.1%!...
点击上方"视学算法",选择加"星标"或"置顶" 重磅干货,第一时间送达 转载自:新智元 | 来源:arxiv 编辑:好困 Priscilla ...
- [caffe]深度学习之CNN检测object detection方法摘要介绍
[caffe]深度学习之CNN检测object detection方法摘要介绍 2015-08-17 17:44 3276人阅读 评论(1) 收藏 举报 一两年cnn在检测这块的发展突飞猛进,下面详 ...
- 同r做一个窗口_目标检测(Object Detection):R-CNN/SPPnet/R-FCN/Yolo/SSD
这篇文章我是Survey目标检测(Object Detection)系列论文的一个总结. 包括R-CNN系列.SPP-net.R-FCN.YOLO系列.SSD.DenseBox等. 基本概念 目标识别 ...
最新文章
- 「模型解读」从2D卷积到3D卷积,都有什么不一样
- ARC080F - Prime Flip(贪心,差分,二分图匹配)
- 关于split与StringTokenizer的理解
- linux线程间同步(1)读写锁
- 乐高无限无法连接到服务器,乐高无限近期热点问题FQ 新手问题解答
- 加速VS2005 or VS2008
- blowfish算法c语言,blowfish-c源代码(简陋).doc
- Win10如何彻底关闭Hyper-V(真实可用,本人亲测)
- 网易互娱笔试题(2021春招)
- navicat创建用户并赋予权限
- tmux | 使用手册 (cheat sheet)
- SLAM十四讲第三章课后习题
- 【性能测试】linux服务器监控性能测试
- Django教程 —— 初步完善图书管理系统
- DDraw的离屏blt
- 微信小程序开发基础教程
- PHP单文件读取excel操作数据库
- 张柠评新“三国”:“卧龙吊丧”看得人想吐(转载者痛处:历史什么时候成了中国人的信仰)...
- InterCompany Shipping业务流程
- 互联网科普-淘宝的聚划算(团购C2B)