本教材现以连载的方式由网络发布,并将于2014年由清华大学出版社出版最终完整版,版权归作者和清华大学出版社所有。本着开源、分享的理念,本教材可以自由传播及学习使用,但是务必请注明出处来自金沙滩工作室
前几章我们学了一种通信协议叫做UART异步串口通信,这节课我们要来学习第二种常用的通信协议I 2 C。I 2 C总线是由PHILIPS公司开发的两线式串行总线,多用于连接微处理器及其外围设备。I 2 C总线的主要特点是接口方式简单,两条线可以挂多个参与通信的器件,即多机模式,而且任何一个器件都可以作为主机,当然同一时刻只能一个主机。
从原理上来讲,UART属于异步通信,比如电脑发送给单片机,电脑只负责把数据通过TXD发送出来即可,接收数据是单片机自己的事情。而I2C属于同步通信,SCL时钟线负责收发双方的时钟节拍,SDA数据线负责传输数据。I2C的发送方和接收方都以SCL这个时钟节拍为基准进行数据的发送和接收。
从应用上来讲,UART通信多用于板间通信,比如单片机和电脑,这个设备和另外一个设备之间的通信。而I2C多用于板内通信,比如单片机和我们本章要学的EEPROM之间的通信。
14.1 I2C时序初步认识
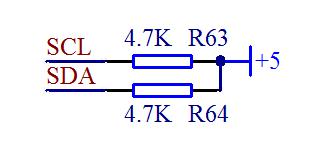
在硬件上,I2C总线是由时钟总线SCL和数据总线SDA两条线构成,连接到总线上的所有的器件的SCL都连到一起,所有的SDA都连到一起。I2C总线是开漏引脚并联的结构,因此我们外部要添加上拉电阻。对于开漏电路外部加上拉电阻的话,那就组成了线“与”的关系。总线上线“与”的关系,那所有接入的器件保持高电平,这条线才是高电平。而任意一个器件输出一个低电平,那这条线就会保持低电平,因此可以做到任何一个器件都可以拉低电平,也就是任何一个器件都可以作为主机,如图14-1所示,我们添加了R63和R64两个上拉电阻。
图14-1 I2C总线的上拉电阻
虽然说任何一个设备都可以作为主机,但绝大多数情况下我们都是用微处理器,也就是我们的单片机来做主机,而总线上挂的多个器件,每一个都像电话机一样有自己唯一的地址,在信息传输的过程中,通过这唯一的地址可以正常识别到属于自己的信息,在我们的KST-51开发板上,就挂接了2个I2C设备,一个是24C02,一个是PCF8591。
我们在学习UART串行通信的时候,知道了我们的通信流程分为起始位、数据位、停止位这三部分,同理在I2C中也有起始信号、数据传输和停止信号,如图14-2所示。
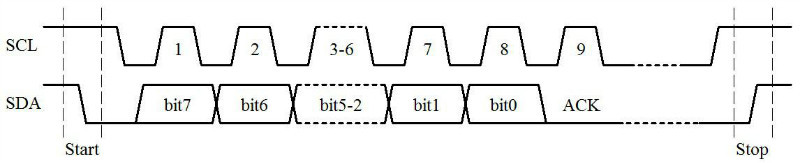
图14-2 I2C时序流程图
从图上可以看出来,I2C和UART时序流程有相似性,也有一定的区别。UART每个字节中,都有一个起始位,8个数据位和1位停止位。而I2C分为起始信号,数据传输部分,最后是停止信号。其中数据传输部分,可以一次通信过程传输很多个字节,字节数是不受限制的,而每个字节的数据最后也跟了一位,这一位叫做应答位,通常用ACK表示,有点类似于UART的停止位。
下面我们一部分一部分的把I2C通信时序进行剖析。之前我们学过了UART,所以学习I2C的过程我尽量拿UART来作为对比,这样有助于更好的理解。但是有一点大家要理解清楚,就是UART通信虽然我们用了TXD和RXD两根线,但是实际一次通信,1条线就可以完成,2条线是把发送和接收分开而已,而I2C每次通信,不管是发送还是接收,必须2条线都参与工作才能完成,为了更方便的看出来每一位的传输流程,我们把图14-2改进成图14-3。

图14-3 I2C通信流程解析
起始信号:UART通信是从一直持续的高电平出现一个低电平标志起始位;而I2C通信的起始信号的定义是SCL为高电平期间,SDA由高电平向低电平变化产生一个下降沿,表示起始信号,如图14-3中的start部分所示。
数据传输:首先,UART是低位在前,高位在后;而I2C通信是高位在前,低位在后。第二,UART通信数据位是固定长度,波特率分之一,一位一位固定时间发送完毕就可以了。而I2C没有固定波特率,但是有时序的要求,要求当SCL在低电平的时候,SDA允许变化,也就是说,发送方必须先保持SCL是低电平,才可以改变数据线SDA,输出要发送的当前数据的一位;而当SCL在高电平的时候,SDA绝对不可以变化,因为这个时候,接收方要来读取当前SDA的电平信号是0还是1,因此要保证SDA的稳定不变化,如图14-3中的每一位数据的变化,都是在SCL的低电平位置。8为数据位后边跟着的是一位响应位,响应位我们后边还要具体介绍。
停止信号:UART通信的停止位是一位固定的高电平信号;而I2C通信停止信号的定义是SCL为高电平期间,SDA由低电平向高电平变化产生一个上升沿,表示结束信号,如图14-3中的stop部分所示。
14.2 I2C寻址模式
上一节介绍的是I2C每一位信号的时序流程,而I2C通信在字节级的传输中,也有固定的时序要求。I2C通信的起始信号(Start)后,首先要发送一个从机的地址,这个地址一共有7位,紧跟着的第8位是数据方向位(R/W),‘0’表示接下来要发送数据(写),‘1’表示接下来是请求数据(读)。
我们知道,打电话的时候,当拨通电话,接听方捡起电话肯定要回一个“喂”,这就是告诉拨电话的人,这边有人了。同理,这个第九位ACK实际上起到的就是这样一个作用。当我们发送完了这7位地址和1位方向位,如果我们发送的这个地址确实存在,那么这个地址的器件应该回应一个ACK‘0’,如果不存在,就没“人”回应ACK。
那我们写一个简单的程序,访问一下我们板子上的EEPROM的地址,另外在写一个不存在的地址,看看他们是否能回一个ACK,来了解和确认一下这个问题。
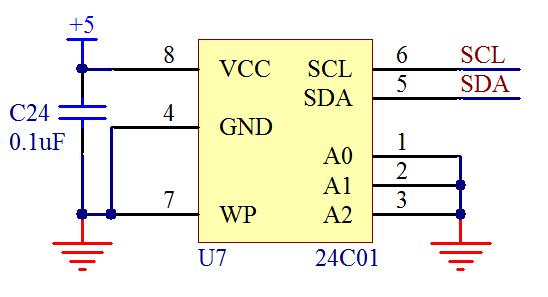
我们板子上的EEPROM器件型号是24C02,在24C02的数据手册3.6部分说明了,24C02的7位地址中,其中高4位是固定的1010,而低3位的地址取决于我们电路的设计,由芯片上的A2、A1、A0这3个引脚的实际电平决定,来看一下我们的24C02的电路图,如图14-4所示。
图14-4 24C02原理图
从图14-4可以看出来,我们的A2、A1、A0都是接的GND,也就是说都是0,因此我们的7位地址实际上是二进制的1010000,也就是0x50。我们用I2C的协议来寻址0x50,另外再寻址一个不存在的地址0x62,寻址完毕后,把返回的ACK显示到我们的1602液晶上,大家对比一下。
/***********************lcd1602.c文件程序源代码*************************/
#include <reg52.h>
#define LCD1602_DB P0
sbit LCD1602_RS = P1^0;
sbit LCD1602_RW = P1^1;
sbit LCD1602_E = P1^5;
void LcdWaitReady() //等待液晶准备好
{
unsigned char sta;
LCD1602_DB = 0xFF;
LCD1602_RS = 0;
LCD1602_RW = 1;
do
{
LCD1602_E = 1;
sta = LCD1602_DB; //读取状态字
LCD1602_E = 0;
} while (sta & 0x80); //bit7等于1表示液晶正忙,重复检测直到其等于0为止
}
void LcdWriteCmd(unsigned char cmd) //写入命令函数
{
LcdWaitReady();
LCD1602_RS = 0;
LCD1602_RW = 0;
LCD1602_DB = cmd;
LCD1602_E = 1;
LCD1602_E = 0;
}
void LcdWriteDat(unsigned char dat) //写入数据函数
{
LcdWaitReady();
LCD1602_RS = 1;
LCD1602_RW = 0;
LCD1602_DB = dat;
LCD1602_E = 1;
LCD1602_E = 0;
}
void LcdShowStr(unsigned char x, unsigned char y, const unsigned char *str) //显示字符串,屏幕起始坐标(x,y),字符串指针str
{
unsigned char addr;
//由输入的显示坐标计算显示RAM的地址
if (y == 0)
addr = 0x00 + x; //第一行字符地址从0x00起始
else
addr = 0x40 + x; //第二行字符地址从0x40起始
//由起始显示RAM地址连续写入字符串
LcdWriteCmd(addr | 0x80); //写入起始地址
while (*str != '\0') //连续写入字符串数据,直到检测到结束符
{
LcdWriteDat(*str);
str++;
}
}
void LcdInit() //液晶初始化函数
{
LcdWriteCmd(0x38); //16*2显示,5*7点阵,8位数据接口
LcdWriteCmd(0x0C); //显示器开,光标关闭
LcdWriteCmd(0x06); //文字不动,地址自动+1
LcdWriteCmd(0x01); //清屏
}
/*************************main.c文件程序源代码**************************/
#include <reg52.h>
#include <intrins.h>
#define I2CDelay() {_nop_();_nop_();_nop_();_nop_();}
sbit I2C_SCL = P3^7;
sbit I2C_SDA = P3^6;
bit I2CAddressing(unsigned char addr);
extern void LcdInit();
extern void LcdShowStr(unsigned char x, unsigned char y, const unsigned char *str);
void main ()
{
bit ack;
unsigned char str[10];
LcdInit(); //初始化液晶
ack = I2CAddressing(0x50); //查询地址为0x50的器件
str[0] = '5'; //将地址和应答值转换为字符串
str[1] = '0';
str[2] = ':';
str[3] = (unsigned char)ack + '0';
str[4] = '\0';
LcdShowStr(0, 0, str); //显示到液晶上
ack = I2CAddressing(0x62); //查询地址为0x62的器件
str[0] = '6'; //将地址和应答值转换为字符串
str[1] = '2';
str[2] = ':';
str[3] = (unsigned char)ack + '0';
str[4] = '\0';
LcdShowStr(8, 0, str); //显示到液晶上
while(1)
{}
}
void I2CStart() //产生总线起始信号
{
I2C_SDA = 1; //首先确保SDA、SCL都是高电平
I2C_SCL = 1;
I2CDelay();
I2C_SDA = 0; //先拉低SDA
I2CDelay();
I2C_SCL = 0; //再拉低SCL
}
void I2CStop() //产生总线停止信号
{
I2C_SCL = 0; //首先确保SDA、SCL都是低电平
I2C_SDA = 0;
I2CDelay();
I2C_SCL = 1; //先拉高SCL
I2CDelay();
I2C_SDA = 1; //再拉高SDA
I2CDelay();
}
bit I2CWrite(unsigned char dat) //I2C总线写操作,待写入字节dat,返回值为从机应答位的值
{
bit ack; //用于暂存应答位的值
unsigned char mask; //用于探测字节内某一位值的掩码变量
for (mask=0x80; mask!=0; mask>>=1) //从高位到低位依次进行
{
if ((mask&dat) == 0) //该位的值输出到SDA上
I2C_SDA = 0;
else
I2C_SDA = 1;
I2CDelay();
I2C_SCL = 1; //拉高SCL
I2CDelay();
I2C_SCL = 0; //再拉低SCL,完成一个位周期
}
I2C_SDA = 1; //8位数据发送完后,主机释放SDA,以检测从机应答
I2CDelay();
I2C_SCL = 1; //拉高SCL
I2CDelay();
ack = I2C_SDA; //读取此时的SDA值,即为从机的应答值
I2C_SCL = 0; //再拉低SCL完成应答位,并保持住总线
return ack; //返回从机应答值
}
bit I2CAddressing(unsigned char addr) //I2C寻址函数,即检查地址为addr的器件是否存在,返回值为其应答值,即应答则表示存在,非应答则表示不存在
{
bit ack;
I2CStart(); //产生起始位,即启动一次总线操作
ack = I2CWrite(addr<<1); //器件地址需左移一位,因寻址命令的最低位为读写位,用于表示之后的操作是读或写
I2CStop(); //不需进行后续读写,而直接停止本次总线操作
return ack;
}
我们把这个程序在KST-51开发板上运行完毕,会在液晶上边显示出来我们预想的结果,主机发送一个存在的从机地址,从机会回复一个应答位;主机如果发送一个不存在的从机地址,就没有从机应答。
前边我有提到过有一个利用库函数_nop_()来进行精确延时,一个_nop_()的时间就是一个机器周期,这个库函数是包含在了intrins.h这个库文件中,我们如果要使用这个库函数,只需要在程序最开始,和包含reg52.h一样,include<intrins.h>之后,我们程序就可以直接使用这个库函数了。
还有一点要提一下,I2C通信分为低速模式100kbit/s,快速模式400kbit/s和高速模式3.4Mbit/s。因为所有的I2C器件都支持低速,但却未必支持另外两种速度,所以作为通用的I2C程序我们选择100k这个速率来实现,也就是说实际程序产生的时序必须小于等于100k的时序参数,很明显也就是要求SCL的高低电平持续时间都不短于5us,因此我们在时序函数中通过插入I2CDelay()这个总线延时函数(它实际上就是4个NOP指令,用define在文件开头做了定义),加上改变SCL值语句本身占用的至少一个周期,来达到这个速度限制。如果以后需要提高速度,那么只需要减小这里的总线延时时间即可。
此外我们要学习一个发送数据的技巧,就是I2C通信时如何将一个字节的数据发送出去。大家注意写函数中,我用的那个for循环的技巧。for (mask=0x80; mask!=0; mask>>=1),由于I2C通信是从高位开始发送数据,所以我们先从最高位开始,0x80和dat进行按位与运算,从而得知dat第7位是0还是1,然后右移一位,也就是变成了用0x40和dat按位与运算,得到第6位是0还是1,一直到第0位结束,最终通过if语句,把dat的8位数据依次发送了出去。其他的逻辑大家对照前边讲到的理论知识,认真研究明白就可以了。
1.3 EEPROM的学习
在实际的应用中,保存在单片机RAM中的数据,掉电后数据就丢失了,保存在单片机的FLASH中的数据,又不能随意改变,也就是不能用它来记录变化的数值。但是在某些场合,我们又确实需要记录下某些数据,而它们还时常需要改变或更新,掉电之后数据还不能丢失,比如我们的家用电表度数,我们的电视机里边的频道记忆,一般都是使用EEPROM来保存数据,特点就是掉电后不丢失。我们板子上使用的这个器件是24C02,是一个容量大小是2Kbit位,也就是256个字节的EEPROM。一般情况下,EEPROM拥有30万到100万次的寿命,也就是它可以反复写入30-100万次,而读取次数是无限的。
24C02是一个基于I2C通信协议的器件,因此从现在开始,我们的I2C和我们的EEPROM就要合体了。但是大家要分清楚,I2C是一个通信协议,它拥有严密的通信时序逻辑要求,而EEPROM是一个器件,只是这个器件采样了I2C协议的接口与单片机相连而已,二者并没有必然的联系,EEPROM可以用其他接口,I2C也可以用在其它很多器件上。
14.3.1 EEPROM单字节读写操作时序
1、EEPROM写数据流程
第一步,首先是I2C的起始信号,接着跟上首字节,也就是我们前边讲的I2C的器件地
址(EERPOM),并且在读写方向上选择“写”操作。
第二步,发送数据的存储地址。我们24C02一共256个字节的存储空间,地址从0x00到0xFF,我们想把数据存储在哪个位置,此刻写的就是哪个地址。
第三步,发送要存储的数据第一个字节,第二个字节......注意在写数据的过程中,EEPROM每个字节都会回应一个“应答位0”,来告诉我们写EEPROM数据成功,如果没有回应答位,说明写入不成功。
在写数据的过程中,每成功写入一个字节,EEPROM存储空间的地址就会自动加1,当加到0xFF后,再写一个字节,地址会溢出又变成了0x00。
2、EEPROM读数据流程
第一步,首先是I2C的起始信号,接着跟上首字节,也就是我们前边讲的I2C的器件地
址(EERPOM),并且在读写方向上选择“写”操作。这个地方可能有同学会诧异,我们明明是读数据为何方向也要选“写”呢?刚才说过了,我们24C02一共有256个地址,我们选择写操作,是为了把所要读的数据的存储地址先写进去,告诉EEPROM我们要读取哪个地址的数据。这就如同我们打电话,先拨总机号码(EEPROM器件地址),而后还要继续拨分机号码(数据地址),而拨分机号码这个动作,主机仍然是发送方,方向依然是“写”。
第二步,发送要读取的数据的地址,注意是地址而非存在EEPROM中的数据,通知EEPROM我要哪个分机的信息。
第三步,重新发送I2C起始信号和器件地址,并且在方向位选择“读”操作。
这三步当中,每一个字节实际上都是在“写”,所以每一个字节EEPROM都会回应一个“应答位0”。
第四步,读取从器件发回的数据,读一个字节,如果还想继续读下一个字节,就发送一个“应答位ACK(0)”,如果不想读了,告诉EEPROM,我不想要数据了,别再发数据了,那就发送一个“非应答位NACK(1)”。
和写操作规则一样,我们每读一个字节,地址会自动加1,那如果我们想继续往下读,给EEPROM一个ACK(0)低电平,那再继续给SCL完整的时序,EEPROM会继续往外送数据。如果我们不想读了,要告诉EEPROM不要数据了,那我们直接给一个NAK(1)高电平即可。这个地方大家要从逻辑上理解透彻,不能简单的靠死记硬背了,一定要理解明白。梳理一下几个要点:A、在本例中单片机是主机,24C02是从机;B、无论是读是写,SCL始终都是由主机控制的;C、写的时候应答信号由从机给出,表示从机是否正确接收了数据;D、读的时候应答信号则由主机给出,表示是否继续读下去。
那我们下面写一个程序,读取EEPROM的0x02这个地址上的一个数据,不管这个数据之前是多少,我们都再将读出来的数据加1,再写到EEPROM的0x02这个地址上。此外我们将I2C的程序建立一个文件,写一个I2C.c程序文件,形成我们又一个程序模块。大家也可以看出来,我们连续的这几个程序,lcd1602.c文件里的程序都是一样的,今后我们大家写1602显示程序也可以直接拿过去用,大大提高了程序移植的方便性。
/*************************I2C.c文件程序源代码***************************/
#include <reg52.h>
#include <intrins.h>
#define I2CDelay() {_nop_();_nop_();_nop_();_nop_();}
sbit I2C_SCL = P3^7;
sbit I2C_SDA = P3^6;
void I2CStart() //产生总线起始信号
{
I2C_SDA = 1; //首先确保SDA、SCL都是高电平
I2C_SCL = 1;
I2CDelay();
I2C_SDA = 0; //先拉低SDA
I2CDelay();
I2C_SCL = 0; //再拉低SCL
}
void I2CStop() //产生总线停止信号
{
I2C_SCL = 0; //首先确保SDA、SCL都是低电平
I2C_SDA = 0;
I2CDelay();
I2C_SCL = 1; //先拉高SCL
I2CDelay();
I2C_SDA = 1; //再拉高SDA
I2CDelay();
}
bit I2CWrite(unsigned char dat) //I2C总线写操作,待写入字节dat,返回值为应答状态
{
bit ack; //用于暂存应答位的值
unsigned char mask; //用于探测字节内某一位值的掩码变量
for (mask=0x80; mask!=0; mask>>=1) //从高位到低位依次进行
{
if ((mask&dat) == 0) //该位的值输出到SDA上
I2C_SDA = 0;
else
I2C_SDA = 1;
I2CDelay();
I2C_SCL = 1; //拉高SCL
I2CDelay();
I2C_SCL = 0; //再拉低SCL,完成一个位周期
}
I2C_SDA = 1; //8位数据发送完后,主机释放SDA,以检测从机应答
I2CDelay();
I2C_SCL = 1; //拉高SCL
ack = I2C_SDA; //读取此时的SDA值,即为从机的应答值
I2CDelay();
I2C_SCL = 0; //再拉低SCL完成应答位,并保持住总线
return (~ack); //应答值取反以符合通常的逻辑:0=不存在或忙或写入失败,1=存在且空闲或写入成功
}
unsigned char I2CReadNAK() //I2C总线读操作,并发送非应答信号,返回值为读到的字节
{
unsigned char mask;
unsigned char dat;
I2C_SDA = 1; //首先确保主机释放SDA
for (mask=0x80; mask!=0; mask>>=1) //从高位到低位依次进行
{
I2CDelay();
I2C_SCL = 1; //拉高SCL
if(I2C_SDA == 0) //读取SDA的值
dat &= ~mask; //为0时,dat中对应位清零
else
dat |= mask; //为1时,dat中对应位置1
I2CDelay();
I2C_SCL = 0; //再拉低SCL,以使从机发送出下一位
}
I2C_SDA = 1; //8位数据发送完后,拉高SDA,发送非应答信号
I2CDelay();
I2C_SCL = 1; //拉高SCL
I2CDelay();
I2C_SCL = 0; //再拉低SCL完成非应答位,并保持住总线
return dat;
}
unsigned char I2CReadACK() //I2C总线读操作,并发送应答信号,返回值为读到的字节
{
unsigned char mask;
unsigned char dat;
I2C_SDA = 1; //首先确保主机释放SDA
for (mask=0x80; mask!=0; mask>>=1) //从高位到低位依次进行
{
I2CDelay();
I2C_SCL = 1; //拉高SCL
if(I2C_SDA == 0) //读取SDA的值
dat &= ~mask; //为0时,dat中对应位清零
else
dat |= mask; //为1时,dat中对应位置1
I2CDelay();
I2C_SCL = 0; //再拉低SCL,以使从机发送出下一位
}
I2C_SDA = 0; //8位数据发送完后,拉低SDA,发送应答信号
I2CDelay();
I2C_SCL = 1; //拉高SCL
I2CDelay();
I2C_SCL = 0; //再拉低SCL完成应答位,并保持住总线
return dat;
}
/***********************lcd1602.c文件程序源代码*************************/
#include <reg52.h>
#define LCD1602_DB P0
sbit LCD1602_RS = P1^0;
sbit LCD1602_RW = P1^1;
sbit LCD1602_E = P1^5;
void LcdWaitReady() //等待液晶准备好
{
unsigned char sta;
LCD1602_DB = 0xFF;
LCD1602_RS = 0;
LCD1602_RW = 1;
do
{
LCD1602_E = 1;
sta = LCD1602_DB; //读取状态字
LCD1602_E = 0;
} while (sta & 0x80); //bit7等于1表示液晶正忙,重复检测直到其等于0为止
}
void LcdWriteCmd(unsigned char cmd) //写入命令函数
{
LcdWaitReady();
LCD1602_RS = 0;
LCD1602_RW = 0;
LCD1602_DB = cmd;
LCD1602_E = 1;
LCD1602_E = 0;
}
void LcdWriteDat(unsigned char dat) //写入数据函数
{
LcdWaitReady();
LCD1602_RS = 1;
LCD1602_RW = 0;
LCD1602_DB = dat;
LCD1602_E = 1;
LCD1602_E = 0;
}
void LcdShowStr(unsigned char x, unsigned char y, const unsigned char *str) //显示字符串,屏幕起始坐标(x,y),字符串指针str
{
unsigned char addr;
//由输入的显示坐标计算显示RAM的地址
if (y == 0)
addr = 0x00 + x; //第一行字符地址从0x00起始
else
addr = 0x40 + x; //第二行字符地址从0x40起始
//由起始显示RAM地址连续写入字符串
LcdWriteCmd(addr | 0x80); //写入起始地址
while (*str != '\0') //连续写入字符串数据,直到检测到结束符
{
LcdWriteDat(*str);
str++;
}
}
void LcdInit() //液晶初始化函数
{
LcdWriteCmd(0x38); //16*2显示,5*7点阵,8位数据接口
LcdWriteCmd(0x0C); //显示器开,光标关闭
LcdWriteCmd(0x06); //文字不动,地址自动+1
LcdWriteCmd(0x01); //清屏
}
/************************main.c文件程序源代码**************************/
#include <reg52.h>
extern void LcdInit();
extern void LcdShowStr(unsigned char x, unsigned char y, const unsigned char *str);
extern void I2CStart();
extern void I2CStop();
extern unsigned char I2CReadACK();
extern unsigned char I2CReadNAK();
extern bit I2CWrite(unsigned char dat);
unsigned char E2ReadByte(unsigned char addr);
void E2WriteByte(unsigned char addr, unsigned char dat);
void main ()
{
unsigned char dat;
unsigned char str[10];
LcdInit(); //初始化液晶
dat = E2ReadByte(0x02); //读取指定地址上的一个字节
str[0] = (dat/100) + '0'; //转换为十进制字符串格式
str[1] = (dat/10%10) + '0';
str[2] = (dat%10) + '0';
str[3] = '\0';
LcdShowStr(0, 0, str); //显示在液晶上
dat++; //将其数值+1
E2WriteByte(0x02, dat); //再写回到对应的地址上
while(1)
{}
}
unsigned char E2ReadByte(unsigned char addr) //读取EEPROM中的一个字节,字节地址addr
{
unsigned char dat;
I2CStart();
I2CWrite(0x50<<1); //寻址器件,后续为写操作
I2CWrite(addr); //写入存储地址
I2CStart(); //发送重复启动信号
I2CWrite((0x50<<1)|0x01); //寻址器件,后续为读操作
dat = I2CReadNAK(); //读取一个字节数据
I2CStop();
return dat;
}
void E2WriteByte(unsigned char addr, unsigned char dat) //向EEPROM中写入一个字节,字节地址addr
{
I2CStart();
I2CWrite(0x50<<1); //寻址器件,后续为写操作
I2CWrite(addr); //写入存储地址
I2CWrite(dat); //写入一个字节数据
I2CStop();
}
/***********************************************************************/
这个程序,以同学们现在的基础,独立分析应该不困难了,遇到哪个语句不懂可以及时问问别人或者搜索一下,把该解决的问题理解明白。大家把这个程序复制过去后,编译一下会发现Keil软件提示了一个警告:*** WARNING L16: UNCALLED SEGMENT, IGNORED FOR OVERLAY PROCESS,这个警告的意思是有我们代码中存在没有被调用过的变量或者函数。
大家仔细观察一下,这个程序,我们读取EEPROM的时候,只读了一个字节我们就要告诉EEPROM不需要再读数据了,因此我们读完后直接回复一个“NAK”,因此我们只调用了I2CReadNAK()这个函数,而并没有调用I2CReadACK()这个函数。我们今后很可能读数据的时候要连续读几个字节,因此这个函数写在了I2C.c文件中,作为I2C功能模块的一部分是必要的,方便我们这个文件以后移植到其他程序中使用,因此这个警告在这里就不必管它了。
14.3.2 EEPROM多字节读写操作时序[size=14.0000pt]
我们读取EEPROM的时候很简单,EEPROM根据我们所送的时序,直接就把数据送出来了,但是写EEPROM却没有这么简单。我们如果给EEPROM发送数据后,先保存在了EEPROM的缓存,EEPROM必须要把缓存中的数据搬移到“非易失”的区域,才能达到掉电不丢失的效果。而往非易失区域写需要一定的时间,每种器件不完全一样,ATMEL公司的24C02的这个写入时间最高不超过5ms。在往非易失区域写的过程,EEPROM是不会再响应我们的访问的,不仅接收不到我们的数据,我们即使用I2C标准的寻址模式去寻址,EEPROM都不会应答,就如同这个总线上没有这个器件一样。数据写入非易失区域完毕后,EEPROM再次恢复正常,可以正常读写了。
细心的同学,在看上一节程序的时候会发现,我们写数据的那段代码,实际上我们有去读应答位ACK,但是读到了应答位我们也没有做任何处理。这是因为我们一次只写一个字节的数据进去,等到下次重新上电再写的时候,时间肯定远远超过了5ms,但是如果我们是连续写入几个字节的时候,我们就必须得考虑到应答位的问题了。写入一个字节后,再写入下一个字节之前,我们必须要等待EEPROM再次响应才可以,大家注意我的程序的写法,可以学习一下。
之前我们知道编写多.c文件移植的方便性了,本节程序和上一节的lcd1602.c文件和I2C.c文件完全是一样的,因此这次我们只把main.c文件给大家发出来,帮大家分析明白。而同学们却不能这样,同学们是初学,很多知识和技巧需要多练才能巩固下来,因此每个程序还是建议大家在你的Keil软件上一个代码一个代码的敲出来。
/***********************lcd1602.c文件程序源代码*************************/
略
/************************I2C.c文件程序源代码***************************/
略
/************************main.c文件程序源代码**************************/
#include <reg52.h>
extern void LcdInit();
extern void LcdShowStr(unsigned char x, unsigned char y, const unsigned char *str);
extern void I2CStart();
extern void I2CStop();
extern unsigned char I2CReadACK();
extern unsigned char I2CReadNAK();
extern bit I2CWrite(unsigned char dat);
void E2Read(unsigned char *buf, unsigned char addr, unsigned char len);
void E2Write(unsigned char *buf, unsigned char addr, unsigned char len);
void ArrayToHexStr(unsigned char *str, unsigned char *array, unsigned char len);
void main ()
{
unsigned char i;
unsigned char buf[5];
unsigned char str[20];
LcdInit(); //初始化液晶
E2Read(buf, 0x90, sizeof(buf)); //从E2中读取一段数据
ArrayToHexStr(str, buf, sizeof(buf)); //转换为十六进制字符串
LcdShowStr(0, 0, str); //显示到液晶上
for (i=0; i<sizeof(buf); i++) //数据依次+1,+2,+3...
{
buf[ i] = buf[ i] + 1 + i;
}
E2Write(buf, 0x90, sizeof(buf)); //再写回到E2中
while(1)
{}
}
void ArrayToHexStr(unsigned char *str, unsigned char *array, unsigned char len) //把一个字节数组转换为十六进制字符串的格式
{
unsigned char tmp;
while (len--)
{
tmp = *array >> 4; //先取高4位
if (tmp <= 9) //转换为0-9或A-F
*str = tmp + '0';
else
*str = tmp - 10 + 'A';
str++;
tmp = *array & 0x0F; //再取低4位
if (tmp <= 9) //转换为0-9或A-F
*str = tmp + '0';
else
*str = tmp - 10 + 'A';
str++;
*str = ' '; //转换完一个字节添加一个空格
str++;
array++;
}
}
void E2Read(unsigned char *buf, unsigned char addr, unsigned char len) //E2读取函数,数据接收指针buf,E2中的起始地址addr,读取长度len
{
do { //用寻址操作查询当前是否可进行读写操作
I2CStart();
if (I2CWrite(0x50<<1)) //器件应答则跳出循环,继续执行,非应答则进行下一次查询
break;
I2CStop();
} while(1);
I2CWrite(addr); //写入起始地址
I2CStart(); //发送重复启动信号
I2CWrite((0x50<<1)|0x01); //寻址器件,后续为读操作
while (len > 1) //连续读取len-1个字节
{
*buf = I2CReadACK(); //最后字节之前为读取操作+应答
buf++;
len--;
}
*buf = I2CReadNAK(); //最后一个字节为读取操作+非应答
I2CStop();
}
void E2Write(unsigned char *buf, unsigned char addr, unsigned char len) //E2写入函数,源数据指针buf,E2中的起始地址addr,写入长度len
{
while (len--)
{
do { //用寻址操作查询当前是否可进行读写操作,即等待上一次写入操作完成
I2CStart();
if (I2CWrite(0x50<<1)) //器件应答则跳出循环,继续执行,非应答则进行下一次查询
break;
I2CStop();
} while(1);
I2CWrite(addr); //写入起始地址
I2CWrite(*buf); //写入一个字节数据
I2CStop(); //结束写操作,以等待写入完成
buf++; //数据指针递增
addr++; //E2地址递增
}
}
函数ArrayToHexStr:这是一个把数组转换成十六进制字符串的形式。由于我们从EEPROM读出来的是正常的数据,而1602液晶接收的是ASCII码字符,因此我们要通过液晶把数据显示出来必须先通过一步转换。算法倒是很简单,就是把每一个字节的数据高4位和低4位分开,和9进行比较,如果小于等于9,则通过数字加’0’转ASCII码发送;如果大于9,则通过加’A’转ASCII码发送出去。
函数E2Read:我们在读之前,要查询一下当前是否可以进行读写操作,EEPROM正常响应才可以进行。进行后,最后一个字节之前的,全部给出ACK,而读完了最后一个字节,我们要给出一个NAK。
函数E2Write:每次写操作之前,我们都要进行查询判断当前EEPROM是否响应,正常响应后才可以写数据。
14.3.3 EEPROM的页写入
如果每个数据都连续写入,像我们上节课那样写的时候,每次都先起始位,再访问一下这个EEPROM的地址,看看是否响应,感觉上效率太低了。因此EEPROM的厂商就想了一个办法,把EEPROM分页管理。24c01、24c02这两个型号是8个字节一个页,而24c04、24c08、24c16是16个字节一页。我们板子上的型号是24C02,一共是256个字节,8个字节一页,那么就一共有32页。
分配好页之后,如果我们在同一个页内连续写入几个字节后,最后再发送停止位的时序。EEPROM检测到这个停止位后,统一把这一页的数据写到非易失区域,就不需要像上节课那样写一个字节检测一次了,并且页写入的时间也不会超过5ms。如果我们写入的数据跨页了,那么写完了一页之后,我们要发送一个停止位,然后等待并且检测EEPROM的空闲模式,一直等到把上一页数据完全写到非易失区域后,再进行下一页的写入,这样就可以在一定程度上提高我们的写入效率。
/***********************lcd1602.c文件程序源代码*************************/
略
/************************I2C.c文件程序源代码***************************/
略
/***********************eeprom.c文件程序源代码*************************/
#include <reg52.h>
extern void I2CStart();
extern void I2CStop();
extern unsigned char I2CReadACK();
extern unsigned char I2CReadNAK();
extern bit I2CWrite(unsigned char dat);
void E2Read(unsigned char *buf, unsigned char addr, unsigned char len) //E2读取函数,数据接收指针buf,E2中的起始地址addr,读取长度len
{
do { //用寻址操作查询当前是否可进行读写操作
I2CStart();
if (I2CWrite(0x50<<1)) //器件应答则跳出循环,继续执行,非应答则进行下一次查询
break;
I2CStop();
} while(1);
I2CWrite(addr); //写入起始地址
I2CStart(); //发送重复启动信号
I2CWrite((0x50<<1)|0x01); //寻址器件,后续为读操作
while (len > 1) //连续读取len-1个字节
{
*buf = I2CReadACK(); //最后字节之前为读取操作+应答
buf++;
len--;
}
*buf = I2CReadNAK(); //最后一个字节为读取操作+非应答
I2CStop();
}
void E2Write(unsigned char *buf, unsigned char addr, unsigned char len) //E2写入函数,源数据指针buf,E2中的起始地址addr,写入长度len
{
while (len > 0)
{
//等待上次写入操作完成
do {
I2CStart();
if (I2CWrite(0x50<<1)) //器件应答则跳出循环,继续执行,非应答则进行下一次查询
break;
I2CStop();
} while(1);
//按页写模式连续写入字节
I2CWrite(addr); //写入起始地址
while (len > 0)
{
I2CWrite(*buf); //写入一个字节数据
len--; //待写入长度计数递减
buf++; //数据指针递增
addr++; //E2地址递增
if ((addr&0x07) == 0) //检查地址是否到达页边界,24C02每页8字节,所以检测低3位是否为零即可
break; //到达页边界时,跳出循环,结束本次写操作
}
I2CStop();
}
}
这个eeprom.c文件中的程序,单独做一个文件,用来管理eeprom的访问。其中E2Read函数和上一节是一样的,因为读操作和是否同一页无关。重点是E2Write函数,我们在写入数据的时候,要计算下一个要写的数据的地址是否是一个页的起始地址,如果是的话,则必须跳出循环,等待EEPROM上一页写入到非易失区域后,再进行继续写入。
而写了eeprom.c后,main.c文件里的程序就要变的简单多了,大家可以自己看一下,不需要过多解释了。
/************************main.c文件程序源代码**************************/
#include <reg52.h>
extern void LcdInit();
extern void LcdShowStr(unsigned char x, unsigned char y, const unsigned char *str);
extern void E2Read(unsigned char *buf, unsigned char addr, unsigned char len);
extern void E2Write(unsigned char *buf, unsigned char addr, unsigned char len);
void ArrayToHexStr(unsigned char *str, unsigned char *array, unsigned char len);
void main ()
{
unsigned char i;
unsigned char buf[5];
unsigned char str[20];
LcdInit(); //初始化液晶
E2Read(buf, 0x8E, sizeof(buf)); //从E2中读取一段数据
ArrayToHexStr(str, buf, sizeof(buf)); //转换为十六进制字符串
LcdShowStr(0, 0, str); //显示到液晶上
for (i=0; i<sizeof(buf); i++) //数据依次+1,+2,+3...
{
buf[ i] = buf[ i] + 1 + i;
}
E2Write(buf, 0x8E, sizeof(buf)); //再写回到E2中
while(1)
{}
}
void ArrayToHexStr(unsigned char *str, unsigned char *array, unsigned char len) //把一个字节数组转换为十六进制字符串的格式
{
unsigned char tmp;
while (len--)
{
tmp = *array >> 4; //先取高4位
if (tmp <= 9) //转换为0-9或A-F
*str = tmp + '0';
else
*str = tmp - 10 + 'A';
str++;
tmp = *array & 0x0F; //再取低4位
if (tmp <= 9) //转换为0-9或A-F
*str = tmp + '0';
else
*str = tmp - 10 + 'A';
str++;
*str = ' '; //转换完一个字节添加一个空格
str++;
array++;
}
}
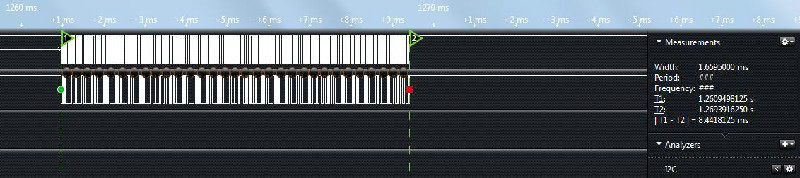
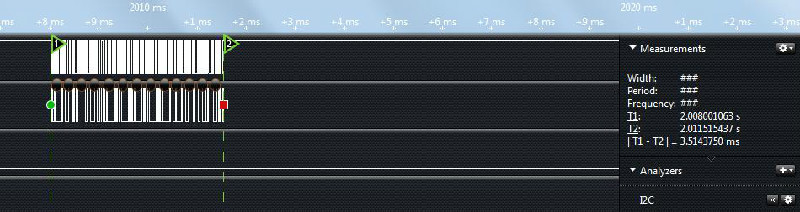
多字节写入和页写入程序都编写出来了,而且页写入的程序我们还特地跨页写的数据,他们的写入时间到底差别多大呢。我们用一些工具可以测量一下,比如示波器,逻辑分析仪等工具。我现在把两次写入时间用逻辑分析仪给抓了出来,并且用时间标签T1和T2给标注了开始位置和结束位置,如图14-5和图14-6所示,右侧显示的|T1-T2|就是最终写入5个字节所耗费的时间。多字节一个一个写入,每次写入后都需要再次通信检测EEPROM是否在“忙”,因此耗费了大量的时间,同样的写入5个字节的数据,一个一个写入用了8.4ms左右的时间,而使用页写入,只用了3.5ms左右的时间。
图14-5 多字节写入时间
图14-6 跨页写入时间
14.4 I2C和EEPROM的综合实验学习[size=14.0000pt]
电视频道记忆功能,交通灯倒计时时间的设定,户外LED广告的记忆功能,都有可能有类似EEPROM这类存储器件。这类器件的优势是存储的数据不仅可以改变,而且掉电后数据保存不丢失,因此大量应用在各种电子产品上。
我们这节课的例程,有点类似广告屏。上电后,1602的第一行显示EEPROM从0x20地址开始的16个字符,第二行显示EERPOM从0x40开始的16个字符。我们可以通过UART串口通信来改变EEPROM内部的这个数据,并且同时改变了1602显示的内容,下次上电的时候,直接会显示我们更新过的内容。
这个程序所有的相关内容,我们之前都已经讲过了。但是这个程序体现在了一个综合程序应用能力上。这个程序用到了1602液晶、UART实用串口通信、EEPROM读写操作等多个功能的综合应用。写个点亮小灯好简单,但是我们想学会真正的单片机,必须得学会这种综合程序的应用,实现多个模块同时参与工作,这个理念在我们的全板子测试视频里已经有所体现。因此同学们,要认认真真的把工程建立起来,一行一行的把程序编写起来,最终巩固下来。
/***********************lcd1602.c文件程序源代码*************************/
略
/************************I2C.c文件程序源代码***************************/
略
/***********************eeprom.c文件程序源代码*************************/
略
/************************uart.c文件程序源代码***************************/
#include <reg52.h>
bit flagOnceTxd = 0; //单次发送完成标志,即发送完一个字节
bit cmdArrived = 0; //命令到达标志,即接收到上位机下发的命令
unsigned char cntRxd = 0;
unsigned char pdata bufRxd[40]; //串口接收缓冲区
extern void LcdShowStr(unsigned char x, unsigned char y, const unsigned char *str);
extern void E2Write(unsigned char *buf, unsigned char addr, unsigned char len);
void ConfigUART(unsigned int baud) //串口配置函数,baud为波特率
{
SCON = 0x50; //配置串口为模式1
TMOD &= 0x0F; //清零T1的控制位
TMOD |= 0x20; //配置T1为模式2
TH1 = 256 - (11059200/12/32) / baud; //计算T1重载值
TL1 = TH1; //初值等于重载值
ET1 = 0; //禁止T1中断
ES = 1; //使能串口中断
TR1 = 1; //启动T1
}
unsigned char UartRead(unsigned char *buf, unsigned char len) //串口数据读取函数,数据接收指针buf,读取数据长度len,返回值为实际读取到的数据长度
{
unsigned char i;
if (len > cntRxd) //读取长度大于接收到的数据长度时,
{
len = cntRxd; //读取长度设置为实际接收到的数据长度
}
for (i=0; i<len; i++) //拷贝接收到的数据
{
*buf = bufRxd[ i];
buf++;
}
cntRxd = 0; //清零接收计数器
return len; //返回实际读取长度
}
void UartWrite(unsigned char *buf, unsigned char len) //串口数据写入函数,即串口发送函数,待发送数据指针buf,数据长度len
{
while (len--)
{
flagOnceTxd = 0;
SBUF = *buf;
buf++;
while (!flagOnceTxd);
}
}
bit CmdCompare(unsigned char *buf, const unsigned char *cmd) //命令比较函数,缓冲区数据与指定命令比较,相同返回1,不同返回0
{
while (*cmd != '\0')
{
if (*cmd != *buf) //遇到不相同字符时即刻返回0
{
return 0;
}
else //当前字符相等时,指针递增准备比较下一字符
{
cmd++;
buf++;
}
}
return 1; //到命令字符串结束时字符都相等则返回1
}
void TrimString16(unsigned char *out, unsigned char *in) //将一字符串整理成16字节的固定长度字符串,不足部分补空格
{
unsigned char i = 0;
while (*in != '\0') //拷贝字符串直到输入字符串结束
{
*out = *in;
out++;
in++;
i++;
if (i >= 16) //当拷贝长度已达到16字节时,强制跳出循环
break;
}
for ( ; i<16; i++) //如不足16个字节则用空格补齐
{
*out = ' ';
out++;
}
*out = '\0'; //最后添加结束符
}
void UartDriver() //串口驱动函数,检测接收到的命令并执行相应动作
{
unsigned char i;
unsigned char len;
unsigned char buf[30];
unsigned char str[17];
const unsigned char code cmd0[] = "showstr1 ";
const unsigned char code cmd1[] = "showstr2 ";
const unsigned char code *cmdList[] = {cmd0, cmd1};
if (cmdArrived) //有命令到达时,读取处理该命令
{
cmdArrived = 0;
for (i=0; i<sizeof(buf); i++) //清零命令接收缓冲区
{
buf[ i] = 0;
}
len = UartRead(buf, sizeof(buf)); //将接收到的命令读取到缓冲区中
for (i=0; i<sizeof(cmdList)/sizeof(cmdList[0]); i++) //与所支持的命令列表逐一进行比较
{
if (CmdCompare(buf, cmdList[ i]) == 1) //检测到相符命令时退出循环,此时的i值就是该命令在列表中的下标值
{
break;
}
}
switch (i) //根据比较结果执行相应命令
{
case 0:
buf[len] = '\0'; //为接收到的字符串添加结束符
TrimString16(str, buf+sizeof(cmd0)-1); //整理成16字节的固定长度字符串,不足部分补空格
LcdShowStr(0, 0, str); //显示字符串1
E2Write(str, 0x20, sizeof(str)); //保存字符串1,其E2起始地址为0x20
break;
case 1:
buf[len] = '\0';
TrimString16(str, buf+sizeof(cmd1)-1);
LcdShowStr(0, 1, str);
E2Write(str, 0x40, sizeof(str)); //保存字符串2,其E2起始地址为0x40
break;
default: //i大于命令列表最大下标时,即表示没有相符的命令,给上机发送“错误命令”的提示
UartWrite("bad command.\r\n", sizeof("bad command.\r\n")-1);
return;
}
buf[len++] = '\r'; //有效命令被执行后,在原命令帧之后添加回车换行符后返回给上位机,表示已执行
buf[len++] = '\n';
UartWrite(buf, len);
}
}
void UartRxMonitor(unsigned char ms) //串口接收监控函数
{
static unsigned char cntbkp = 0;
static unsigned char idletmr = 0;
if (cntRxd > 0) //接收计数器大于零时,监控总线空闲时间
{
if (cntbkp != cntRxd) //接收计数器改变,即刚接收到数据时,清零空闲计时
{
cntbkp = cntRxd;
idletmr = 0;
}
else
{
if (idletmr < 30) //接收计数器未改变,即总线空闲时,累积空闲时间
{
idletmr += ms;
if (idletmr >= 30) //空闲时间超过30ms即认为一帧命令接收完毕
{
cmdArrived = 1; //设置命令到达标志
}
}
}
}
else
{
cntbkp = 0;
}
}
void InterruptUART() interrupt 4 //UART中断服务函数
{
if (RI) //接收到字节
{
RI = 0; //手动清零接收中断标志位
if (cntRxd < sizeof(bufRxd)) //接收缓冲区尚未用完时,
{
bufRxd[cntRxd++] = SBUF; //保存接收字节,并递增计数器
}
}
if (TI) //字节发送完毕
{
TI = 0; //手动清零发送中断标志位
flagOnceTxd = 1; //设置单次发送完成标志
}
}
/************************main.c文件程序源代码**************************/
#include <reg52.h>
unsigned char T0RH = 0; //T0重载值的高字节
unsigned char T0RL = 0; //T0重载值的低字节
extern void LcdInit();
extern void LcdShowStr(unsigned char x, unsigned char y, const unsigned char *str);
extern void E2Read(unsigned char *buf, unsigned char addr, unsigned char len);
extern void ConfigUART(unsigned int baud);
extern void UartRxMonitor(unsigned char ms);
extern void UartDriver();
void ConfigTimer0(unsigned int ms);
void InitShowStr();
void main ()
{
EA = 1; //开总中断
ConfigTimer0(1); //配置T0定时1ms
ConfigUART(9600); //配置波特率为9600
LcdInit(); //初始化液晶
InitShowStr(); //初始显示内容
while(1)
{
UartDriver();
}
}
void InitShowStr() //处理液晶屏初始显示内容
{
unsigned char str[17];
str[16] = '\0'; //在最后添加字符串结束符,确保字符串可以结束
E2Read(str, 0x20, 16); //读取第一行字符串,其E2起始地址为0x20
LcdShowStr(0, 0, str); //显示到液晶屏
E2Read(str, 0x40, 16); //读取第二行字符串,其E2起始地址为0x40
LcdShowStr(0, 1, str); //显示到液晶屏
}
void ConfigTimer0(unsigned int ms) //T0配置函数
{
unsigned long tmp;
tmp = 11059200 / 12; //定时器计数频率
tmp = (tmp * ms) / 1000; //计算所需的计数值
tmp = 65536 - tmp; //计算定时器重载值
tmp = tmp + 18; //修正中断响应延时造成的误差
T0RH = (unsigned char)(tmp >> 8); //定时器重载值拆分为高低字节
T0RL = (unsigned char)tmp;
TMOD &= 0xF0; //清零T0的控制位
TMOD |= 0x01; //配置T0为模式1
TH0 = T0RH; //加载T0重载值
TL0 = T0RL;
ET0 = 1; //使能T0中断
TR0 = 1; //启动T0
}
void InterruptTimer0() interrupt 1 //T0中断服务函数
{
TH0 = T0RH; //定时器重新加载重载值
TL0 = T0RL;
UartRxMonitor(1); //串口接收监控
}
我们在学习UART通信的时候,刚开始也是用的IO口去模拟UART通信过程,最终实现和电脑的通信。而后我们的STC89C52RC由于内部具备了UART硬件通信模块,所以我们直接可以通过配置寄存器就可以很轻松的实现单片机的UART通信。同样的道理,我们这个I2C通信,如果我们单片机内部有硬件模块的话,单片机可以直接自动实现I2C通信了,就不需要我们再进行IO口模拟起始、模拟发送、模拟结束,配置好寄存器,单片机就会把这些工作全部做了。
不过我们的STC89C52RC单片机内部不具备I2C的硬件模块,所以我们使用STC89C52RC单片机进行I2C通信必须用IO口来模拟。使用IO口模拟I2C,实际上更有利于我们彻底理解透彻I2C通信的实质。当然了,通过学习IO口模拟通信,今后我们如果遇到内部带I2C模块的单片机,也应该很轻松的搞定,使用内部的硬件模块,可以提高程序的执行效率。
14.5 作业
1、彻底理解I2C的通信时序,不仅仅是记住。
2、能够独立完成EEPROM任意地址的单字节读写、多字节的跨页连续写入读出。
3、将前边学的交通灯进行改进,使用EEPROM保存红灯和绿灯倒计时的时间,并且可以通过UART改变红灯和绿灯倒计时时间。
4、使用按键、1602液晶、EEPROM做一个简单的密码锁程序。
I2C总线与EPPROM相关推荐
- SylixOS iMX6平台I2C总线驱动
原理概述 I2C总线驱动概述 I2C总线驱动是I2C适配器的软件实现,提供I2C适配器与从设备间完成数据通信的能力,比如起始,停止,应答信号和MasterXfer的实现函数.驱动程序包含初始化I2C总 ...
- SylixOS 基于STM32平台的GPIO模仿I2C总线的驱动开发流程
2019独角兽企业重金招聘Python工程师标准>>> 概述 本文档以STM32F767平台为例,详细介绍SylixOS上GPIO模仿I2C总线的驱动开发流程. 初始化 GPIO模仿 ...
- linux i2c ioctl错误,关于读写I2C总线的时候出错的有关问题
关于读写I2C总线的时候出错的问题 我的程序是这样的: #include #include #include #include #include #include #include #include ...
- I2C 总线原理与架构
一.I2C总线原理 I2C是一种常用的串行总线,由串行数据线SDA 和串行时钟线SCL组成.I2C是一种多主机控制总线,它和USB总线不同,USB是基于master-slave机制,任何设备的通信必须 ...
- [I2C]I2C总线协议图解
转自:http://blog.csdn.net/w89436838/article/details/38660631 1 I2C总线物理拓扑结构 I2C 总线在物理连接上非常简单,分别由 ...
- I2C总线及AT24C02读写实验报告
/************************************************** 实验名称:I2C总线实验一 实验目的:利用定时器产生0~99秒表在数码管前两位显示 每过一秒写入 ...
- Linux I2C子系统分析之(一) ----- 用GPIO模拟I2C总线
在drivers/i2c/busses下包含各种I2C总线驱动,如S3C2440的I2C总线驱动i2c-s3c2410.c,使用GPIO模拟I2C总线的驱动i2c-gpio.c,这里只分析i2c-gp ...
- 使用GPIO模拟I2C总线进行通信
I2C总线的通信过程(见图4-8)主要包含三个主要阶段:起始阶段.数据传输阶段和终止阶段. 1. 起始阶段 在I2C总线不工作的情况下,SDA(数据线)和SCL(时钟线)上的信号均为高电平.如果此时主 ...
- Linux I2C子系统分析-I2C总线驱动
在drivers/i2c/busses下包含各种I2C总线驱动,如S3C2440的I2C总线驱动i2c-s3c2410.c,使用GPIO模拟I2C总线的驱动i2c-gpio.c,这里只分析i2c-gp ...
- i2c Linux 动态 波特率,如何在Linux中设置i2c总线的波特率?
我有一台基于riko-3288处理器的ARM计算机.我还具有带有自定义内核(不带模块系统)的设备的Ubuntu映像. 我目前正在尝试为i2c总线设置最高100KHz的波特率.我不是Linux方面的专家 ...
最新文章
- Ubuntu NFS 服务器和客户端挂载详解
- @autowired注解原理_SpringBoot注解大全,收藏一波!!!
- fruncm server sql 无法生成 线程_MSSQLSERVER启动不了,报SQL Server 无法生成 FRunCM 线程...
- linux安装grpc占用空间大,grpc linux安装-Go语言中文社区
- dfs剪枝:洛谷P2809 hzwer爱折纸
- 【OS学习笔记】三十八 保护模式十:中断和异常的处理与抢占式多任务对应的汇编代码----微型内核汇代码
- Visual Studio 2012 Update 4 RC 启动调试失败解决方案
- 【Elasticsearch】Elasticsearch 动态模板(Dynamic templates)
- Spring的线程安全
- 【渝粤教育】国家开放大学2018年秋季 0550-22T素描(一) 参考试题
- 2021中职网络空间安全国赛Web渗透测试
- python导入数据画折线图_Python学习第93课-导入csv数据并绘制折线图
- 解决win10拨号连接下无法开启热点
- 用html制作课程表
- Windows10 如何清理注册表,教大家清理注册表方法
- 使用CCS导出TXT用于BSL烧录
- element tree 父级勾选子级也勾选,子级勾选默认父级也勾选, 子级取消勾选不影响父级勾选(前端)
- 2的n次方对照表,最大256次方,2021年
- java计算机毕业设计商品供应管理系统源码+系统+数据库+lw文档+mybatis+运行部署
- Aspose.Words for .NET使用教程(七):将文档转换为EPUB
热门文章
- android电视手柄游戏,为游戏而生 Android TV的秘密武器露真容
- 计算机主机无法开机故障原因,电脑电源保护无法开机怎么办
- 春季养肝注意三个行为,做对了一年少生病
- 163vip邮箱提醒您谨防邮箱诈骗,点击查看常见套路
- index.highlight.max_analyzed_offset
- VMware Error | IP地址经常变更
- 计算机的音量找不到了,电脑音量调节小喇叭不见了修复方法
- 【Python/Pytorch - Bug】-- RuntimeError: ,expected input[16,12,174,145] to have 8 channels,but got 12
- 干货分享:PDF分割合并工具免费哪个好用?
- rabbitmq批量确认结合qos导致的消费者假死和消息丢失问题