[转]ADAS各功能模块及ADAS解决方案提供商详解
如果你认为本系列文章对你有所帮助,请大家有钱的捧个钱场,点击此处赞助,赞助额0.1元起步,多少随意
声明:本文只用于个人学习交流,若不慎造成侵权,请及时联系我,立即予以改正
锋影
email:174176320@qq.com
ADAS 采用的传感器主要有摄像头、雷达、激光和超声波等,可以探测光、热、压力或其它用于监测汽车状态的变量, 通常位于车辆的前后保险杠、侧视镜、驾驶杆内部或者挡风玻璃上。早期的ADAS 技术主要以被动式报警为主,当车辆检测到潜在危险时, 会发出警报提醒驾车者注意异常的车辆或道路情况。
ADAS 通常包括以下系统:
| ADAS功能大类 | ADAS功能分类 | 缩写 | 英文名 |
| 高级驾驶辅助系统 | ADAS | Advanced Driving Assistant System | |
| 行车视频记录 | DVR | Discharge Voltage Regulator | |
| 预警类 | 车道偏离预警 | LDW | Lane Departure Warning |
| 行人碰撞预警 | PCW | Pedestrian Collision Warning | |
| 前方碰撞预警系统 | FCW | Forward Collision Warning | |
| 车距检测及警告 | HMW | Headway Monitoring & Warning | |
| 疲劳预警 | |||
| 主动控制类 | 自适应巡航控制 | ACC | Adaptive Cruise Control |
| 自动紧急刹车 | AEB | Autonomous Emergency Braking | |
| 车道保持系统 | LKS | Lane Keeping Assist | |
| 智能车速控制 | ISA | Intelligent Speed Adaptation | |
| 智能大灯控制 | AFL | Adaptive Front Lights | |
| 自适应灯光控制 | Adaptivelight control | ||
| 下坡控制系统 | Hill descentcontrol | ||
| 下坡行车辅助控制系统 | Down-hill assist control | ||
| 远光自动控制 | IHC | Intelligent Headlight Control | |
| 自动泊车 | PA | Parking Assistance | |
| 其它辅助驾驶 | 疲劳驾驶检测 | DFM | Driver Fatigue Monitor |
| 抬头显示器 | HUD | Heads-Up Display | |
| 注意力检测系统 | DMS | Driver Monitoring Systems | |
| 行人检测系统 | PDS | Pedestrian Detection System | |
| 交通信号及标志牌识别 | RSR | Road Sign Recognition | |
| 交通标志识别 | TSR | Traffic Sign Recognition | |
| 交通信号灯识别系统 | TLR | Traffic Light Recognition | |
| 自动纠偏系统 | BST | ||
| 盲区检测 | BSD | Blind Spot Monitoring | |
| 远近光灯辅助 | ADB | AdapTIve Driving Beam | |
| 自适应前照灯系统 | AFS | Adaptive Front-lighting System | |
| 汽车夜视系统 | NVS | Night Vision System | |
| 全景泊车停车辅助系统 | SVC | Surround View Cameras | |
| 电子警察系统 | ISA | Intelligent speed adaptation | |
| 车联网 | VCA | Vehicular Communication systems | |
| 行人保护系统 | Pedestrian protectionsystem | ||
| 电动汽车报警系统 | Electric vehicle warningsounds | ||
| 实时交通系统 | TMC | Traffic Message Channel | |
| 全车监视系统 | AVM | Around View Monitoring | |
| 全景影像系统 | SVM | Surround View Monitor |
ADAS主流的应用解决方案的半导体厂商:
1.赛灵思(Xilinx)的Zynq平台解决方案
灵思的汽车级Zynq-7000 All Programmable片上系统(SoC)平台可帮助系统厂商加快在环绕视觉、3D环绕视觉、后视摄像头、动态校准、行人检测、后视车道偏离警告和盲区检测等高级驾驶员辅助应用的开发时间。Zynq采用单一芯片即可完成ADAS解决方案的开发。Zynq-7000 All Programmable SoC大幅提升了性能,便于各种捆绑式应用,能实现不同产品系列间的可扩展性。其次, Zynq-7000 All Programmable SoC实现了ADAS优化的平台,可以让汽车制造商和汽车电子产品供应商在平台上添加自己的IP以及赛灵思汽车生态系统提供的现成的IP从而能够创建出独有的差异化系统。
从市场层面上看,目前和未来的ADAS应用的共同之处是将多种摄像头和超声传感器与专用实时处理系统相结合。而Zynq-7000在视频/影像捕捉;视频/影像处理;自定义算法/Accelerators;连接功能;编码/解码领域具有极大的灵活性。
2.ADI 低、中、高档 视觉ADAS解决方案
ADI基于视觉的ADAS系统提供车道偏离警告、交通信号识别、智能前灯控制、物体检测/分类、行人检测等功能。基于雷达的系统具有类似的功能,此外还可提供前/后停车帮辅助、安全车距预警、车道变换辅助、盲点检测、碰撞缓冲刹车系统、全速范围自适应巡航控制等功能。
ADAS技术目前基本应用在高端车型中,主因是总体成本高,就ADI的高、中、低端汽车ADAS方案针对某一项或几项技术进行实现,并把成本降到2美元、 十几美元,对整车厂商及消费者无疑是一大好消息,也为加速ADAS普及贡献了一份力量。
它是基于VGA或HD分辨率的前视摄像头辅助驾驶的低、中、高端参考方案,基于Blackfin系列处理器,集成的视觉预处理器能够显著减轻处理器的负 担,从而降低对处理器的性能要求。
ADI Blackfin视觉驾驶辅助系统(ADAS)基于Blackfin系列处理器,其中低端系统基于BF592,实现LDW功能;中端系统基于 BF53x/BF54x/BF561,实现LDW/HBLB/TSR等功能;高端系统基于BF60x,实LDW/HBLB/TSR/FCW/PD等功能。 集成的视觉预处理器能够显著减轻处理器的负担,从而降低对处理器的性能要求。
不同档次的ADAS,促进ADAS普及
BF592的低端方案,实现LDW功能,成本仅2美元;
BF53x/54x/561的中端方案,实现LDW/HBLB/TSR等功能,成本十几美元;
高端系统基于BF60x,实LDW/HBLB/TSR/FCW/PD等功能。
3. 飞思卡尔ADAS解决方案
飞思卡尔主要专注于前视(车道偏离和跟踪,盲点检测),后视(智能泊车和测距),环视(泊车)的ADAS 应用。飞思卡尔为未来的ADAS系统设计了很多微控制器产品。如采用CogniVue 的 APEX IP 技术的SCP2200 系列,SCP2200 解决方案通过集成高密度内存将物料成本降至最低,并使摄像机微型化。该系列产品的并行图像处理架构能够同时处理图像数据。

对未来ADAS及信息娱乐系统,因为信息量和高分辨率等要求,需要更高带宽的总线来解决问题,以太网是最好的解决方案。飞思卡尔和OminiVision, 博通推出全球首个基于以太网的环视泊车系统。Freescale的Qorivva MPC5604E 32位MCU, 基于Power Architecture技术,管理视频传送和摄像机控制,可将所需通信带宽降至不到100 Mbps ,汽车通常需要4或5条低压差分信号电缆来传输视频数据,每条电缆的价格约合10美元。
MPC5604E MCU和i.MX6 系列多媒体处理器提供了很好的基于以太网的环视解决方案。MPC5604E可以把摄像头的数据通过以太网传给中央处理器i.MX6.i.MX6系列包括基于ARM Cortex-A9架构的单核、双核和四核家族,并结合了强大的生态系统,是基于单个硬件设计而开发终端设备组合的理想平台。它具有非常强大的处理图像的能力,能快速提控当前信息。
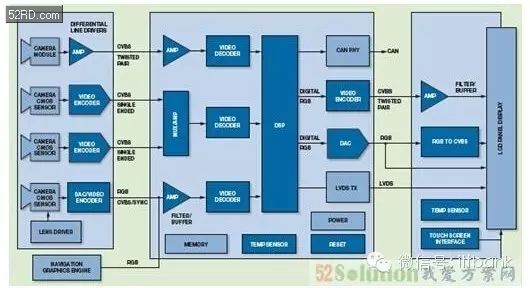
4、TI DSP的360度环视ADAS解决方案
艾睿电子基于德州仪器(TI)的DSP芯片TMS320DM642,推出了一套360度环视ADAS解决方案。该方案以后装汽车市场为目标,搭配来自ADI、ISSI、Numonyx、OmniVision等供应商的电子元器件,拥有2米视觉范围,135度后视场角度,±10%静态倒车线误差,以及小于15像素的相邻视图错误。
![]()
TMS320DM642数字信号处理器是TI公司推出的一款高性能定点DSP芯片,隶属于该公司C64x系列,已获得广泛应用。其功能方框图如下:
![]()
TMS320DM642数字信号处理器功能方框图
![]()
5、瑞萨电子三大ADAS方案
俯视监控提供了汽车周围360度的视景,利用图像识别技术是其正逐步发展成为环绕检测系统。SH7766是一款图像识别SoC,搭载了SH-4A内核、失真校正引擎、图形、图像识别引擎以及其他环绕检测系统所需的硬件引擎。
单芯片实现汽车俯视系统,图像识别SoC SH7766
实现高性能3D图形引擎,支持逼真的3D图像 IMP-X2图像识别引擎 六个视频输入通道,包括了四个集成NTSC ADC的通道,从而降低了系统成本。
![]()
环绕检测系统/后方监视器系统框图
在车辆行驶过程中,这些系统使用摄像头或毫米波雷达探测白线、行人以及障碍物,从而为驾驶人员提供驾车辅助。瑞萨电子提供两套高级驾驶辅助系统(ADAS)产品及解决方案,配备有大容量RAM的高性能RISC SH745x系列微控制器,以及配备有片上图像识别引擎的 SH776x图像识别SoC。
![]()
![]()
前方检测系统/视觉系统框图
参考:https://www.iczoom.com/t-solution/6671-scheme.html
6、NXP 360°全景泊车辅助解决方案
在车身前、后、左、右四个方向均安装广角摄像头,并将四个广角摄像头同一时刻采集到的多路视频影像畸变矫正后进行鸟瞰变换(透视变换),然后进行图像拼接,合成一幅车身周围的鸟瞰图,最后在中控台的屏幕上显示。
方案优势:
高性能,PNX9530主频高达351MHz,每个指令周期可执行8条指令。DDR2数据率达到533MHz/32位,能提供足够内存带宽来处理大量视频数据;
低成本。能够支持同时4路视频输入,且可以对视频图像进行畸变矫正和鸟瞰变换的处理器成本均远远高于PNX9530;
最多支持8路摄像头输入,具有很高的灵活性和扩展性;
OSD叠加、倒车轨迹叠加、图像分屏显示、反交错等均可通过DSP实现,无需额外专用芯片,最大限度降低系统复杂度和节省整机成本;
支持2路数字液晶屏输出。
ADAS应用必将会在中低端汽车市场普及开来。再加上中国政府对汽车安全法规的大力推动,必将使得ADAS技术应用在中国汽车电子市场有一个大的增长。中国各大OEM,包括本土品牌已经在这方面积极准备,在不久的将来,中国会有更多具有ADAS系统特性的汽车。
7、森国科 ADAS解决方案
SGKS6802X是一款针对全高清 ADAS/行车记录仪产品应用开发的低功耗、低照度、低码率、低成本、高集成度的 SoC芯片。该芯片具有 1080P@30fps H.264多码流编码能力,高效视频编码压缩率,内置优秀的图像处理算法和丰富的智能视频分析算法。在满足客户产品功能差异化、图像质量及性能要求的同时,高集成度的硬件设计可大幅降低系统成本,稳定完善的 SDK软件包可极大缩短客户开发周期。
![]()
参考:http://www.gokeic.com/article/product/detail-15.html
8. 富士通360度3D全景系统方案
富士通的ADAS技术主要涉及透过摄像头和传感器的结合,实现图像识别辅助和接近目标检测,应用的领域主要有360度3D立体全景辅助、可视停车辅助、驾驶盲区监控、安全开车门以及车行驶方向周围的障碍物和行人的识别。
基于MB86R11“Emerald-L”2D/3D图像SoC的全景视频系统支持前后左右四个摄像头进行汽车周边环境的实时全景视频监测。
MB86R11采用视频处理算法
由于芯片本身集成了高性能的图形处理和中央处理器、存储器控制器,通过硬件的方式实现实时的四路视频信息处理,避免了一般视频处理芯片进行大量实时视频信息处理时的性能瓶颈。
产品特性:
1. 四个内置视频捕捉功能:同时处理各种不同的视频图像;
2. 三个输出显示功能和高速2D/3D渲染功能:支持多达五个显示输出;
3. 内置图像强化电路。
富士通的360度全景系统方案,采用3D的建模和独特图形合成算法,围绕车身四周可构建多个虚拟三维立体视角,结合车身CAN总线做到自动视角动画的缩放和切换。作为驾驶员的视觉辅助,汽车上配备了4个摄像机影像的合成系统,但是以往的技术只能做二维图像合成,因而只能进行特定视角的显示。而360度全景系统方案能将来自4-6个摄像机的影像合成到三维模型上,从而可以从任意视角显示全方位场景。以往的系统将摄像机影像投影到二维平面上,只能表现从上方观看的俯视图,有时难以分辨周围的车辆和行人,而富士通360度全景系统,则是将影像投影在立体曲面上,可以任意变换观看角度,能完整表现出希望看到的场景,从而提高了可辨识性。
在接近目标图像检测的技术方面,富士通运用灵活的时间帧来采集2个不同的图形,能够检测大约60米远的目标,传统的图形识别只能做到20米。富士通的ADAS应用包括可视辅助和识别辅助。可视辅助给驾驶人员提供更为立体的广泛视角范围,减少视角盲区范围;识别辅助对后方或者侧面接近的目标进行检测,提醒驾驶人员变道的潜在危险,也可以做到停车后提示是否适合安全开车门。
9、地平线机器人(Horizon Robotics)
地平线的自动驾驶AI芯片“征程”在去年12月20日正式发布。在参数上,征程能够以1.5W的功耗,实现1Tflops的算力,每秒处理30帧4K视频,对图像中超过200个物体进行识别,能够实现FCW/ LDW/ JACC等高级别辅助驾驶功能,满足L2的计算需求。对比英伟达的DrivePX2,其采用16nm FinFET工艺,单精度计算能力为8TFlops,深度学习计算能力为24TFlops,官方TDP是250w;从性能功耗比来看,征程还是有明显优势的。同时,由于ASIC不是GPU类的通用计算,内部直接封装了算法,数据交换只是底层I/O,因此其计算的时延也会比GPU更低。不过地平线采用ASIC的路线也是牺牲了芯片的可编程性以获得更高的性能,是否能获得足够订单量来降低芯片成本值得关注。
10、中科寒武纪(Cambricon)
寒武纪在去年11月初的发布会上首次发布了面向智能驾驶领域的1M智能处理器IP产品,据介绍其性能可达到寒武纪1A处理器的10倍以上。据了解,2016年上市的1A处理器在1Ghz频率下理论峰值性能为:FP16半精度浮点计算能力为512GFlops,稀疏神经网络计算能力为2TFlops。
11、四维图新
四维图新在2016年5月收购了联发科旗下的汽车半导体公司杰发科技,后者在2017年6月的CES Asia上展出了首款车规级ADAS芯片。四维图新在去年7月正式发布了该款ADAS芯片,并与蔚来、威马、爱驰亿维等新造车公司达成了合作。公开资料显示,该芯片采用64位Quad A53架构,内置硬件图像加速引擎,支持双路高清视频输出,和四路高清视频输入,能同时支持高级车载影音娱乐系统全部功能和丰富的ADAS功能。功能包括:360°全景泊车系统、车道偏移警示系统LDW、前方碰撞警示系统FCW、行人碰撞警示系统PCW、交通标志识别系统TSR、车辆盲区侦测系统BSD、驾驶员疲劳探测系统DFM和后方碰撞预警系统RCW等。
[转]ADAS各功能模块及ADAS解决方案提供商详解相关推荐
- ADAS(3) 各功能模块及解决方案提供商详解
转自: http://www.52rd.com/S_TXT/2016_1/TXT78751.HTM?WebShieldDRSessionVerify=U6Y6USYM0JN0A7yn5qr1 先进驾驶 ...
- ADAS各功能模块及ADAS解决方案提供商详解
ADAS 采用的传感器主要有摄像头.雷达.激光和超声波等,可以探测光.热.压力或其它用于监测汽车状态的变量, 通常位于车辆的前后保险杠.侧视镜.驾驶杆内部或者挡风玻璃上.早期的ADAS 技术主要以被动 ...
- [玩转UE4/UE5动画系统>应用篇>功能模块] 之 ALS V4 主状态机详解
本教程采用图文教程+视频教程的多元化形式,我会为不同的知识点选择适当的表达方式.教程内容将同步免费发布于 开发游戏的老王(知乎|CSDN)的专栏<玩转UE4/UE5动画系统>.教程中使用的 ...
- 无线Wifi模块AP和STA工作模式详解
无线Wifi模块AP和STA工作模式详解 Wifi模块包括两种工作模式AP和STA,在这两模式的支持下,无线图传产品可以实现一发多收的功能.下面我们就从AP和STA的基本概念开始了解它们. 一.AP和 ...
- python os模块安装方法_基于python中pygame模块的Linux下安装过程(详解)
一.使用pip安装Python包 大多数较新的Python版本都自带pip,因此首先可检查系统是否已经安装了pip.在Python3中,pip有时被称为pip3. 1.在Linux和OS X系统中检查 ...
- 传统企业如何选择优质的微信解决方案提供商
当前,互联网+时代已经到来,很多传统企业开始意识到互联网变革时代信息化转型的重要性.开始着手构建基于"移动互联网+企业业务流程"整合的互联网+解决方案. 对于大多数传统企业来说,开 ...
- 创新发展,科技制胜 | 云扩科技入选“2022中小企业智能化解决方案提供商TOP10”
近日,由中国科学院主管.科学出版社主办的<互联网周刊>发布"2022企业服务分类排行",作为RPA领域的创新领军者,云扩科技凭借过硬的产品技术能力及不俗的市场表现强势入 ...
- 「镁客·请讲」拓攻机器人尹亮亮:以第三方飞控解决方案提供商的身份进入市场...
飞控本身就是一个对技术要求很高的技术,而这正是拓攻的优势所在. 无人机之所以能够实现无人飞行,离不开它的"大脑"--飞控系统.而正是因为有了飞控的加持,无人机才能在空中完成自主起飞 ...
- pymssql mysql_Python数据库模块pymssql连接SQLServer数据库操作详解
Python数据库模块pymssql连接SQLServer数据库操作详解 发布时间:2018-08-23 19:32, 浏览次数:720 , 标签: Python pymssql SQLServer ...
最新文章
- LT1004CZ-2.5 参考电压源
- pip包重新安装mysql_Ubuntu pip 安装 mysql-python包出错
- 第十五章 Python和Web
- python随机森林筛选变量_如何使用虚拟变量来表示python scikit-learn随机森林中的分类数据...
- MSP430F149学习之IO端口
- WRDS卓越学者和沃顿研究数据与分析图书馆员会议在北京宾大沃顿中国中心举行:庆祝研究、思想领导力和全球合作方面的创新
- ceph rgw lc工作流程
- 中英文论文写作指导第二部分(前言)
- 利用JavaScript分别实现倒计时、跑马灯和打字机效果
- 百度云盘下载慢解决办法
- C++ std map unordered_map hash_map 的查找性能测试代码及结果
- 最新计算机视觉学习路线教程
- 无限大平板隔声量理论及Matlab实现(Huang Mengqing论文复现)
- python连接SSAS
- 【Android 源码解析】bus 实现原理(附demo)
- 古巴是西半球最难上网的国家 但可能会是互联网巨头的未来战场
- 区块链底层平台FISCO BCOS的证书机制
- 我所理解的JVM(六):内存回收
- 怎么写实验论文的结论和参考文献部分
- NB-IoT标准演进R13-R14
热门文章
- 百年奥运知多少(1)
- Java基础19:IO流—缓冲流、转换流、序列化、打印流、压缩流和解压流
- Camera的开启与隐藏 panel的开启与隐藏
- java中double..compare_Java Double类compare()方法与示例
- 触摸屏坏了有哪些现象_外屏坏了有哪些现象
- vue 动态绑定href a href动态改变 vue href改变 vue 修改href
- C++报错:Using directive refers to implicitly-defined namespace ‘std‘
- 纯HTML,CSS实现点击图片,显示内容
- 成都,今夜请将我遗忘
- html video标签 mp3,html5中的video标签和audio标签详解