迭代最近点算法 Iterative Closest Points
研究生课程系列文章参见索引《在信科的那些课》
基本原理
假定已给两个数据集P、Q,  ,给出两个点集的空间变换f使他们能进行空间匹配。这里的问题是,f为一未知函数,而且两点集中的点数不一定相同。解决这个问题使用的最多的方法是迭代最近点法(Iterative Closest Points Algorithm)。
,给出两个点集的空间变换f使他们能进行空间匹配。这里的问题是,f为一未知函数,而且两点集中的点数不一定相同。解决这个问题使用的最多的方法是迭代最近点法(Iterative Closest Points Algorithm)。
基本思想是:根据某种几何特性对数据进行匹配,并设这些匹配点为假想的对应点,然后根据这种对应关系求解运动参数。再利用这些运动参数对数据进行变换。并利用同一几何特征,确定新的对应关系,重复上述过程。
迭代最近点法目标函数
 ,他们的欧式距离表示为:
,他们的欧式距离表示为:

 ,
, ,利用最小二乘法求解最优解使:
,利用最小二乘法求解最优解使:
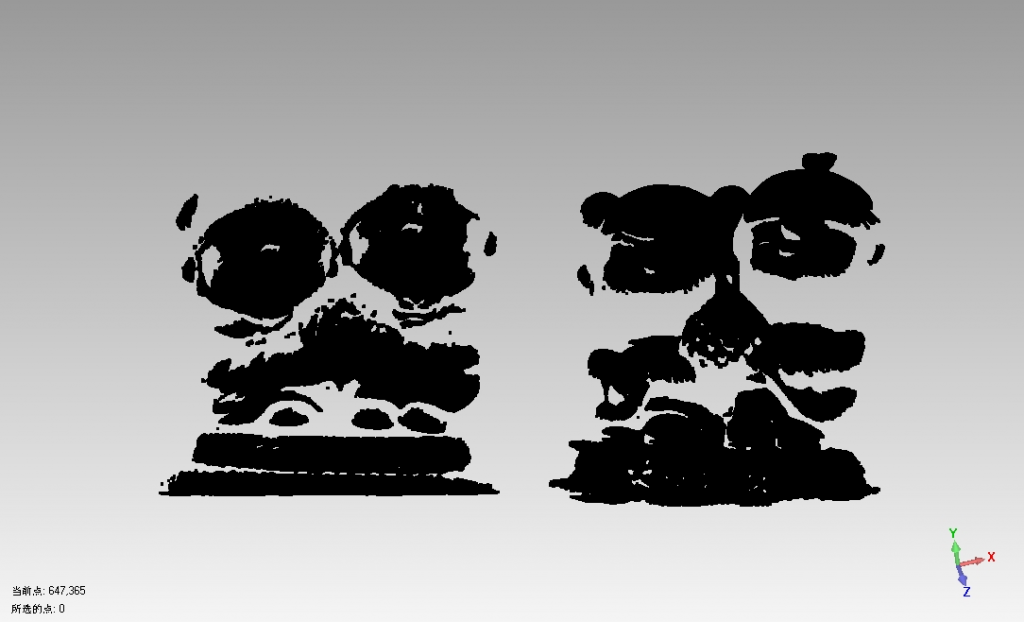
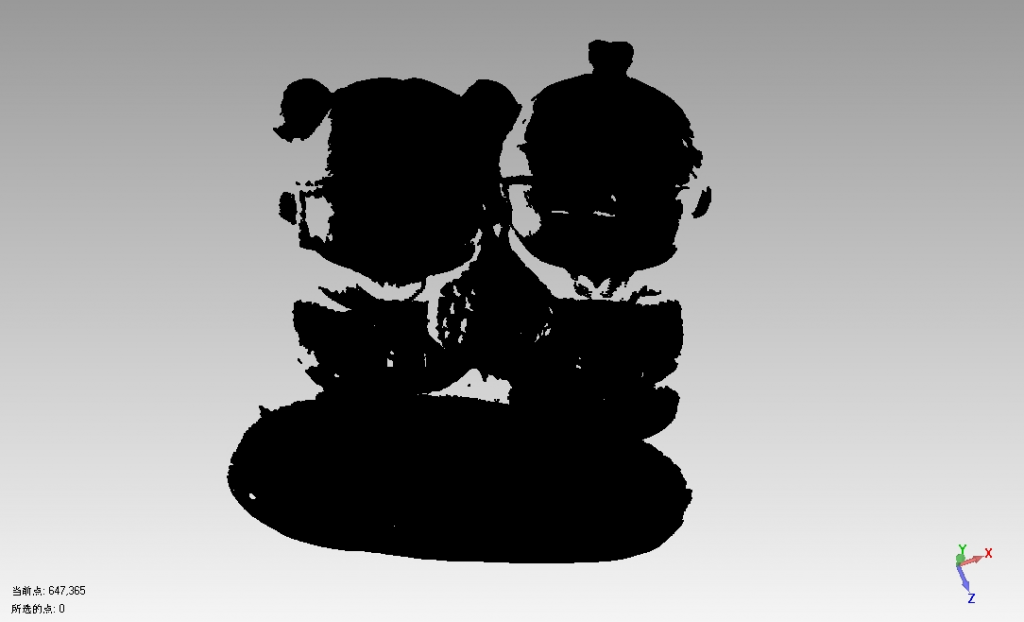
数据预处理
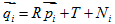
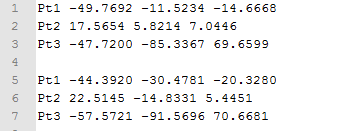
由于第一组(第一排第1个)和第三组(第一排第三个)采集均为模型正面点云,所以选用一和三做后续的实验。
首先利用Geomagic Studio中删除点的工具,去除原始数据中的一些隔离的噪点,效果如下:
平行移动和旋转的分离
先对平移向量T进行初始的估算,具体方法是分别得到点集P和Q的中心:
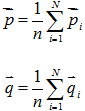
分别将点集P和Q平移至中心点处:


最优化问题分解为:
- 求使E最小的

- 求使

平移中心点的 具体代码为:


- //计算点云P的中心点mean
- void CalculateMeanPoint3D(vector<Point3D> &P, Point3D &mean)
- {
- vector<Point3D>::iterator it;
- mean.x = 0;
- mean.y = 0;
- mean.z = 0;
- for(it=P.begin(); it!=P.end(); it++){
- mean.x += it->x;
- mean.y += it->y;
- mean.z += it->z;
- }
- mean.x = mean.x/P.size();
- mean.y = mean.y/P.size();
- mean.z = mean.z/P.size();
- }
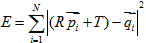
初始平移效果如下:

利用控制点求初始旋转矩阵
在确定对应关系时,所使用的几何特征是空间中位置最近的点。这里,我们甚至不需要两个点集中的所有点。可以指用从某一点集中选取一部分点,一般称这些点为控制点(Control Points)。这时,配准问题转化为:
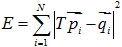
这里,pi,qi为最近匹配点。
在Geomagic Studio中利用三个点就可以进行两个模型的“手动注册”(感觉这里翻译的不好,Registration,应该为“手动匹配”)。
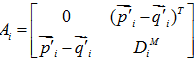
 ,
, 为
为 的转置矩阵。
的转置矩阵。
对于每一对矩阵Ai,计算矩阵B:

- double B[16];
- for(int i=0;i<16;i++)
- B[i]=0;
- for(itp=P.begin(),itq=Q.begin();itp!=P.end();itp++,itq++ ){
- double divpq[3]={itp->x,itp->y,itp->z};
- double addpq[3]={itp->x,itp->y,itp->z};
- double q[3]={itq->x,itq->y,itq->z};
- MatrixDiv(divpq,q,3,1);
- MatrixAdd(addpq,q,3,1);
- double A[16];
- for(int i=0;i<16;i++)
- A[i]=0;
- for(int i=0;i<3;i++){
- A[i+1]=divpq[i];
- A[i*4+4]=divpq[i];
- A[i+13]=addpq[i];
- }
- double AT[16],AMul[16];
- MatrixTran(A,AT,4,4);
- MatrixMul(A,AT,AMul,4,4,4,4);
- MatrixAdd(B,AMul,4,4);
- }
原最优化问题可以转为求B的最小特征值和特征向量,具体代码:
- //使用奇异值分解计算B的特征值和特征向量
- double eigen, qr[4];
- MatrixEigen(B, &eigen, qr, 4);
- //计算n阶正定阵m的特征值分解:eigen为特征值,q为特征向量
- void MatrixEigen(double *m, double *eigen, double *q, int n)
- {
- double *vec, *eig;
- vec = new double[n*n];
- eig = new double[n];
- CvMat _m = cvMat(n, n, CV_64F, m);
- CvMat _vec = cvMat(n, n, CV_64F, vec);
- CvMat _eig = cvMat(n, 1, CV_64F, eig);
- //使用OpenCV开源库中的矩阵操作求解矩阵特征值和特征向量
- cvEigenVV(&_m, &_vec, &_eig);
- *eigen = eig[0];
- for(int i=0; i<n; i++)
- q[i] = vec[i];
- delete[] vec;
- delete[] eig;
- }
- //计算旋转矩阵
- void CalculateRotation(double *q, double *R)
- {
- R[0] = q[0]*q[0] + q[1]*q[1] - q[2]*q[2] - q[3]*q[3];
- R[1] = 2.0 * (q[1]*q[2] - q[0]*q[3]);
- R[2] = 2.0 * (q[1]*q[3] + q[0]*q[2]);
- R[3] = 2.0 * (q[1]*q[2] + q[0]*q[3]);
- R[4] = q[0]*q[0] - q[1]*q[1] + q[2]*q[2] - q[3]*q[3];
- R[5] = 2.0 * (q[2]*q[3] - q[0]*q[1]);
- R[6] = 2.0 * (q[1]*q[3] - q[0]*q[2]);
- R[7] = 2.0 * (q[2]*q[3] + q[0]*q[1]);
- R[8] = q[0]*q[0] - q[1]*q[1] - q[2]*q[2] + q[3]*q[3];
- }
平移矩阵计算
2.4中可以得到选择矩阵的4元数表示,由于在"平行移动和旋转的分离"中,我们将最优问题分解为:
- 求使E最小的
- 求使
因此还需要通过中心点计算平移矩阵。
- //通过特征向量计算旋转矩阵R1和平移矩阵T1
- CalculateRotation(qr, R1);
- double mean_Q[3]={_mean_Q.x,_mean_Q.y,_mean_Q.z};
- double mean_P[3]={_mean_P.x,_mean_P.y,_mean_P.z};
- double meanT[3]={0,0,0};
- int nt=0;
- for(itp=P.begin(),itq=Q.begin();itp!=P.end();itp++,itq++ ){
- double tmpP[3]={itp->x,itp->y,itp->z};
- double tmpQ[3]={itq->x,itq->y,itq->z};
- double tmpMul[3];
- MatrixMul(R1, mean_P, tmpMul, 3, 3, 3, 1);
- MatrixDiv(tmpQ,tmpMul,3,1);
- MatrixAdd(meanT,tmpQ,3,1);
- nt++;
- }
- for(int i=0; i<3; i++)
- T1[i] = meanT[i]/(double)(nt);
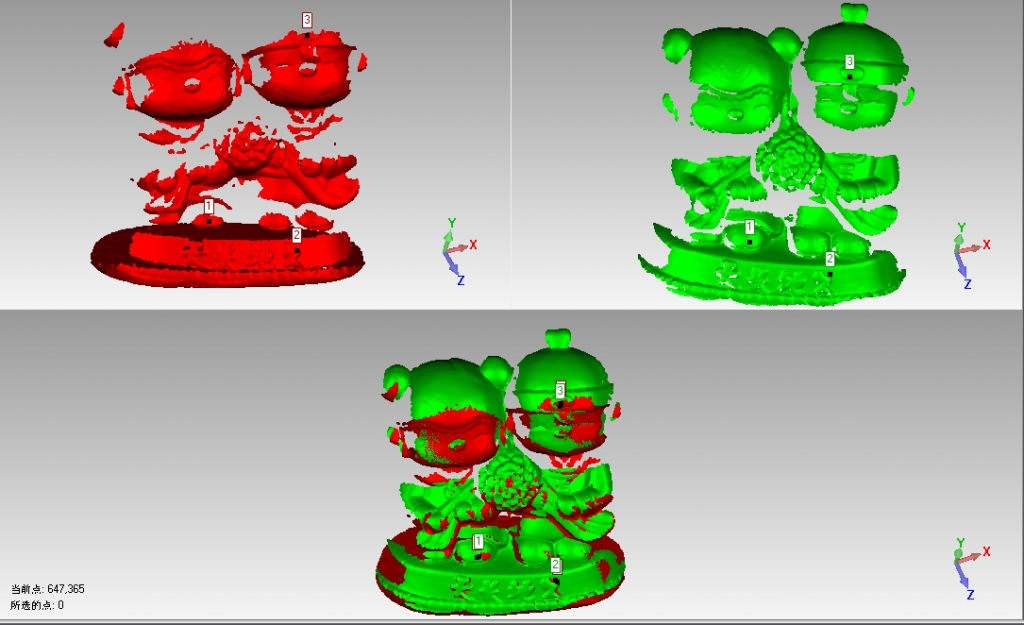
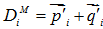
一次旋转计算得到的矩阵如下:
效果在Geomagic Studio中显示如图:

迭代最近点
在初始匹配之后,所点集P`中所有点做平移变化,在比较点集合P`和Q`的匹配度,(或迭代次数)作为算法终止的条件。
具体为对点集P中每个点,找Q中离他最近的点作为对应点。在某一步利用前一步得到的 ,求使下述函数最小的
,求使下述函数最小的 :
:
这里, 
- //计算误差和d
- d = 0.0;
- if(round==1){
- FindClosestPointSet(data,P,Q);
- }
- int pcount=0;
- for(itp = P.begin(),itq=Q.begin();itp!=P.end(); itp++, itq++){
- double sum = (itp->x - itq->x)*(itp->x - itq->x) + (itp->y - itq->y)*(itp->y - itq->y)
- + (itp->z - itq->z)*(itp->z - itq->z);
- d += sum;
- pcount++;
- }
- d=d/(double)(pcount);
循环结束后能得到较好的匹配效果:

迭代最近点算法 Iterative Closest Points相关推荐
- 迭代最近点算法Iterative Closest Point(ICP)以及c++实现代码
有两组对应的点集(corresponding point sets): 求欧式变换 使得: ICP 算法基于最小二乘法进行迭代计算,使得误差平方和达到极小值: 可通过以下三个步骤进行求解: (1)定 ...
- 迭代最近点(Iterative Closest Point, ICP)算法及matlab实现
前言 通常,使用RGB-D相机或是其他方法获取到物体的三维点云后,由于采集设备不同.拍摄视角不同等等因素的影响,即使是同一个物体所得到的点云也会有较大的差异,主要是旋转或者平移的变化.对于一组图像数据 ...
- 迭代最近点(Iterative Closest Point, ICP)算法
1. 定义 ICP(Iterative Closest Point,迭代最近点)算法是一种迭代计算方法,主要用于计算机视觉中深度图像的精确拼合,通过不断迭代最小化源数据与目标数据对应点来实现精确地拼合 ...
- 绝对不可错过的图形学算法!迭代最近点算法——ICP算法
图像配准是图像处理研究领域中的一个典型问题和技术难点,其目的在于比较或融合针对同一对象在不同条件下获取的图像,例如图像会来自不同的采集设备,取自不同的时间,不同的拍摄视角等等,有时也需要用到针对不同对 ...
- ICP算法(Iterative Closest Point迭代最近点算法)
最近在做点云匹配,需要用c++实现ICP算法,下面是简单理解,期待高手指正. ICP算法能够使不同的坐标下的点云数据合并到同一个坐标系统中,首先是找到一个可用的变换,配准操作实际是要找到从坐标系1到坐 ...
- 迭代近邻算法Iterative Closest Point, ICP
参考的文章链接: https://zhuanlan.zhihu.com/p/35893884 https://blog.csdn.net/u014709760/article/details/9924 ...
- VTK修炼之道58:图形基本操作进阶_点云配准技术(迭代最近点ICP算法)
1.Iterative Closest Points算法 点云数据配准最经典的方法是迭代最近点算法(Iterative Closest Points,ICP).ICP算法是一个迭代的过程,每次迭代中对 ...
- ICP(迭代最近点)算法推导详解
概述 ICP用来求解3D-3D的位姿估计问题.假设有一组配对好的3D点,例如对两幅RGB-D图像进行匹配,或者是EPnP方法中已知参考的在相机坐标系中的坐标和在世界坐标系的坐标(参考我PnP的博文): ...
- 迭代硬阈值算法IHT:Iterative Hard-Thresholding
迭代硬阈值算法IHT:Iterative Hard-Thresholding 前言 硬阈值函数 迭代硬阈值算法 参考 前言 最近在学习压缩感知的重构算法,重构算法整体来看分为三大类: ①贪婪迭代类算法 ...
最新文章
- 李飞飞:人工智能应用广泛 但场景理解不如2岁孩子
- 系统架构的演变 -----自 罗文浩
- airpodspro窃听模式_AirPods Pro实时收听怎么关闭? AirPods Pro实时收听的使用方法
- 1、Flutter Widget(IOS Style) - CupertinoApp;
- 记一次参加 CrossOver Meetup 的经历
- 06 ansible剧本功能实践介绍
- 每日小记2017.3.7
- B/S开发框架Web安全问题及防范规范之挂马和WebShell
- matlab调用自己写的函数时报错: reference to a cleared variable
- python 魔法方法
- 字节跳动入局全网搜索;思科回应中国区裁员;IntelliJ IDEA 新版发布! | 极客头条...
- 原生JS实现粘贴到剪贴板
- mysql5.7.20 sql mode_MySQL5.7中的sql_mode默认值带来的坑及解决方法
- CCF201903-5 317号子任务(100分题解链接)
- 外卖侠cps V5.6版本小程序源码_支持多种CPS收益和流量主收益
- Java 正则表达式
- AXI总线简介(二)
- weblogic windows 打补丁_weblogic的版本及打补丁
- win8 配置要求
- 老外的各种no-sql数据库的比较贴