PID参数整定快速入门(调节器参数整定方法)
转载地址 http://yunrun.com.cn/tech/440.html
PID参数整定方法很多,常见的工程整定方法有临界比例度法、衰减曲线法和经验法。云南昌晖仪表制造有限公司以图文形式介绍以临界比例度法和衰减曲线法整定调节器PID参数方法。
临界比例度法
一个调节系统,在阶跃干扰作用下,出现既不发散也不衰减的等幅震荡过程,此过程成为等幅振荡过程,如下图所示。此时pid调节器的比例度为临界比例度δk,被调参数的工作周期为为临界周期Tk。

临界比例度法整定PID参数步骤
临界比例度法整定PID参数具体操作如下:
1、被控系统稳定后,把PID调节器的积分时间放到最大,微分时间放到零(相当于切除了积分和微分作用,只使用比例作用)。
2、通过外界干扰或使PID调节器设定值作一阶跃变化,观察由此而引起的测量值振荡。
3、从大到小逐步把PID调节器的比例度减小,看测量值振荡的变化是发散的还是衰减的,如是衰减的则应把比例度继续减小;如是发散的则应把比例度放大。
4、连续重复2和3步骤,直至测量值按恒定幅度和周期发生振荡,即持续4-5次等幅振荡为止。此时的比例度示值就是临界比例度δk。
5、从振荡波形图来看,来回振荡1次的时间就是临界周期Tk,即从振荡波的第一个波的顶点到第二个波的顶点的时间。如果有条件用记录仪,就比较好观察了,即可看振荡波幅值,还可看测量值输出曲线的峰-峰距离,把该测量值除以记录纸的走纸速度,就可计算出临界周期Tk;如果是DCS控制或使用无纸记录仪,在趋势记录曲线中可直接得出Tk。
临界比例度法PID参数整定经验公式
|
调节规律 |
调节器参数 |
||
|
比例度δ,单位:% |
积分时间Ti,单位:min |
微分时间Td,单位:min |
|
|
P |
2×δk |
--- |
--- |
|
PI |
2.2×δk |
0.85×Tk |
--- |
|
PD |
1.8×δk |
--- |
0.1×Tk |
|
PID |
1.7×δk |
0.5×Tk |
0.125×Tk |
6、将计算所得的调节器参数输入调节器后再次运行调节系统,观察过程变化情况。多数情况下系统均能稳定运行状态,如果还未达到理想控制状态,进需要对参数微调即可。
衰减曲线法
衰减曲线法整定调节器参数通常会按照4:1和10:1两种衰减方式进行,两种方法操作步骤相同,但分别适用于不同工况的调节器参数整定。
4:1衰减曲线法整定调节器参数
纯比例度作用下的自动调节系统,在比例度逐渐减小时,出现4:1衰减振荡过程,此时比例度为4:1衰减比例度δs,两个相邻同向波峰之间的距离为4:1衰减操作周期TS,如下图所示 
4:1衰减曲线法整定PID参数步骤
4:1衰减曲线法整定PID参数具体操作如下:
1、在闭合的控制系统中,将PID调节器变为纯比例作用,比例度放在较大的数值上。
2、系统达到稳定后,通过外界干扰或使PID调节器设定值作一阶跃变化,观察记录曲线的衰减比。
3、从大到小改变比例度,直至出现4:1衰减比为止,记下此时的比例度δs(叫4:1衰减比例度)并从曲线上得出衰减周期Ts(在4∶1曲线中为峰-峰时间)。对有些控制对象,控制过程进行较快,难以从记录曲线上找出衰减比。这时只要被控量波动2次就能达到稳定状态,可近似认为是4:1的衰减过程,其波动1次时间为Ts。
4、得到了衰减比例度Ps和衰减周期Ts后,就可根据表中的经验公式求出PID调节器的PID参数。
4 :1衰减曲线法PID参数整定经验公式
|
调节规律 |
调节器参数 |
||
|
比例度δ,单位:% |
积分时间Ti,单位:min |
微分时间Td,单位:min |
|
|
P |
δs |
--- |
--- |
|
PI |
0.2×δs |
0.5×Ts |
--- |
|
PID |
0.8×δs |
0.3×Ts |
0.1×Ts |
5、将比例度放在比计算值略大的数值上,逐步引入积分和微分作用。
6、将比例度降至计算值上,观察运行,适当调整。
10:1衰减曲线法整定调节器参数
在部分调节系统中,由于采用4:1衰减比仍嫌振荡比较厉害,则可采用10:1的衰减过程,如下图所示。这种情况下由于衰减太快,要测量操作周期比较困难,但可测取从施加干扰开始至第一个波峰飞升时间Tr。 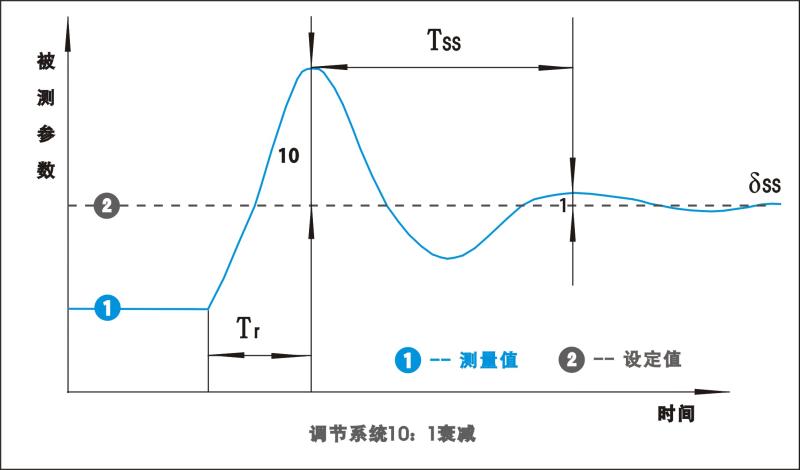
10:1衰减曲线法整定调节参数步骤和4:1衰减曲线法完全一致,仅采用的整定参数和经验公式不同。
10:1衰减曲线法PID参数整定经验公式
|
调节规律 |
调节器参数 |
||
|
比例度δ,单位:% |
积分时间Ti,单位:min |
微分时间Td,单位:min |
|
|
P |
δss |
--- |
--- |
|
PI |
1.2×δss |
2×Tr |
--- |
|
PID |
0.8×δss |
1.2×Tr |
0.4×Tr |
衰减曲线法比较简便,适用于一般情况下的各种参数的控制系统。但对于干扰频繁,记录曲线不规则,不断有小摆动时,由于不易得到正确的衰减比例度δs和衰减周期Ts,使得这种方法难于应用。
PID参数整定快速入门(调节器参数整定方法)相关推荐
- Fortify SCA快速入门以及常见问题解决方法
本篇将透过HP_Fortify_SCA_and_Apps_3.80从实用主义的角度入手,使读者能够快速的对该工具进行使用和对一些可能出现的常见问题进行处理,从而完成一个完整流程的源代码安全性静态扫描测 ...
- fortify java_Fortify SCA快速入门以及常见问题解决方法
本篇将透过HP_Fortify_SCA_and_Apps_3.80从实用主义的角度入手,使读者能够快速的对该工具进行使用和对一些可能出现的常见问题进行处理,从而完成一个完整流程的源代码安全性静态扫描测 ...
- PID智能小车快速入门(一)
一.基本PID原理 1.什么是PID? PID控制器是一种线性控制器,通俗的来讲如人走直线一样,眼睛是观测器,下肢为执行器,当走偏了由眼睛观测得出当前位置和直线的偏差,由人脑根据偏差调整脚步回归直线的 ...
- rap技术原理_有没有什么快速入门rap说唱的方法?
理解了说唱就简单了,拆分他的节奏,了解他的原理,分析他的鼓点,其实说是说不清楚的,这东西都靠理解,理解的越好,你做的也就越好,不懂的话,那你再怎么唱都是乱的,没有灵魂,至于理解的话, 我觉得第一理解拍 ...
- 永磁同步电机(PMSM)磁场定向控制(FOC)转速环PI调节器参数整定
文章目录 前言 一.调节器的工程设计方法 二.转速环PI调节器的参数整定 2.1.转速环的结构框图 2.2.典型II型系统 2.3.转速环PI参数整定计算公式 三.转速环PI调节器设计实例 3.1.永 ...
- C4D快速入门教程——挤压
C4D快速入门教程--挤压 使用方法 C4D版本R24 挤压&伸展变形器主要对模型进行压扁和拉伸操作. 使用方法 经常有童鞋,使用平面或样条去拉伸后,发现没有封顶.我们就不用几何体演示了.用平 ...
- MATLAB2019 快速入门教程(官方手册翻译)(2/4)
2 语言基础 2.1 矩阵与方阵 2.1.1 矩阵 2.1.2 输入矩阵 2.1.3 求和,转置和对角线转列向量函数 2.1.4 矩阵函数 2.1.5 矩阵的产生 2.2 表达式 2.2.1 变量 2 ...
- 永磁同步电机(PMSM)磁场定向控制(FOC)电流环PI调节器参数整定
文章目录 前言 一.调节器的工程设计方法 二.电流环PI调节器的参数整定 2.1.电流环的结构框图 2.2.典型I型系统 2.3.电流环PI参数整定计算公式 三.电流环PI调节器设计实例 3.1.永磁 ...
- 永磁同步电机矢量控制(三)————电流环转速环调节器参数整定
3.电流环转速环的设计 3.1 电流内环调节器的设计 矢量控制系统的电流环是对进行控制,控制的是定子电流,进而控制电机转矩. 电流内环的作用是在电机启动过程中能够以最大电流启动,同时在外部扰动时能够 ...
- SWMM从入门到实践教程 03 快速入门案例的设施参数设置与批量设置
文章目录 1 雨量计 1.1 雨量计基础设置 1.2 雨量计数据来源 2 汇水区 2.1 参数讲解 2.2 设置结果 3 检查井 3.1 参数讲解 3.2 批量设置 4 管道 4.1 参数讲解 4.2 ...
最新文章
- 2017年度最受欢迎开源中国项目:roncoo-pay投票评选
- 获取打印机分辨率_喵喵机P2S热敏打印机,升级屏幕带来了哪些体验??
- Jquery Easy UI Datagrid 上下移动批量保存数据
- 三十五、深入Python的引用计数
- Linux开发5款实用工具推荐
- 【51nod - 1108】距离之和最小 V2(曼哈顿距离,中位数性质)
- CentOS 下无线网卡的安装和使用
- C# 笔记1 - 操作目录
- uniapp 如何给搜索框设值_uni-app 顶部配置搜索框和左右图标
- 马恩驰:R向量化运算
- Redis配置和持久性
- Python3爬取妹子图——爬虫下载网络图片
- ROM 、RAM和FLASH 的区别
- ffmpeg和JavaCV
- ascii码01100001_【多选题】计算机中字符a的ASCII码值是(01100001)2,那么字符c的ASCII码值是( )。...
- 坚果云+Typora+vscode 参考notion 进行个人知识管理
- 前后端分离 -- 深入浅出 Spring Boot + Vue 实现工程项目进度管理系统 Vue不过如此~
- NTFS - 系统解析
- PG-Strom源码分析
- opengl 知识点2