My findings:CoordConv坐标嵌入技术及其泛化性能
title: CoordConv - My Surprising Findings
author: yangsenius
original url: https://senyang-ml.github.io/2020/09/22/coordconv/
mathjax: true
date: 2020-9-22 19:53:41
tags:
- Deep Learning
- Reproduce
- Neural Network
Uber团队在2018NeurIPS上提出了CoordConv,它分析了卷积神经网络在进行坐标预测时存在的缺陷,并引入坐标嵌入方式来解决这个问题。但本人也注意到网上有人质疑这个方法,比如量子位小编报道了一个国外博主的质疑。本人看了他的质疑,他主要是在强调:
用完全数学的方式就可以构造出一个由one-hot heatmap映射到坐标的神经网络,并且根本不需要训练
实际上,他讲的这个和soft-argmax对heatmap求积分得到坐标的方法很像。首先,我想说,数学的归纳是一种非常高阶的手段和智能,很多问题本身就可以直接去用数学问题去解决,但是,这是直接注入了人类专家的知识,并不是神经网络本身从头学习到的(from scratch)。
CoordConv探讨的是,神经网络在拟合能力上以及泛化能力上存在的缺陷。CoorConv的亮点之一在于构造数据集划分的巧妙,一个是普通的train和test坐标数值分布一致的数据集,另外一个是test中的坐标取汁是train中完全没有的取值分布的数据集(正方形的1/4一角区域拿出来做测试),后者在考验模型在未见到的坐标分布上的泛化能力。
该论文的实验以及本人的实验验证发现,大多数普通的MLP或者Conv是很难调出一个好的泛化效果。而CoordConv神奇之处在于,它通过训练的方式来获取一种数学上的严格计算能力,结果确实做到了,因为train loss 和 test loss同时收敛到0,模型可以100%地精确预测坐标,这对于普通神经网络真的挺难的。
本文主要进行了如下的代码实验和分析:
- 数据集:构造由坐标生成的one-hot heatmap与数值坐标之间的数据集:遵循An Intriguing Failing of Convolutional Neural Networks and the CoordConv Solution的quarter split方式。
- 模型:利用神经网络加坐标嵌入(MLP+Coord and Conv+Coord)的方式进行拟合与泛化测试。
- 效果分析与发现:用Pytorch复现验证了An Intriguing Failing of Convolutional Neural Networks and the CoordConv Solution中Superivised Coordinates Regression任务的CoordConv的泛化性能!
- 可视化神经网络的某些层和输出,来发掘神经网络学习坐标信息的过程
数据集的构造
构造一个简单的数据集:由非归一化坐标构造表示位置的One-hot heatmap:
(x,y)→H∈Rh×w(x,y)\rightarrow H\in\mathbb{R}^{h\times w} (x,y)→H∈Rh×w
H(j,i)={1ifi=x∧j=y0ifi≠x∨j≠yH(j,i)=\left\{\begin{matrix} 1 & \text{if}\,\,i=x\wedge j=y\\ 0 & \text{if}\,\,i\neq x\vee j\neq y \end{matrix}\right. H(j,i)={10ifi=x∧j=yifi=x∨j=y
其中,输入数据是HHH,标签是(x,y)(x,y)(x,y)
这个数据集还有一个特殊的部分就是train和test的划分。我们根据Coordconv论文,考虑了两种划分:
- train set和test set采取uniform的位置数据采样
- train set和test set采取quarter split的位置数据采样,即train set是在一个正方形内3/4区域内采样,test set在正方向剩下区域1/4采样
第二种数据集划分方式,更能考验模型的泛化性能,即在未见到的数据上的预测能力。
代码如下:
import torch
import numpy as np
from skimage.filters import gaussianh=64
w=64def position(H, W, is_cuda=False):if is_cuda:loc_w = torch.linspace(-1.0, 1.0, W).cuda().unsqueeze(0).repeat(H, 1)loc_h = torch.linspace(-1.0, 1.0, H).cuda().unsqueeze(1).repeat(1, W)else:loc_w = torch.linspace(-1.0, 1.0, W).unsqueeze(0).repeat(H, 1)loc_h = torch.linspace(-1.0, 1.0, H).unsqueeze(1).repeat(1, W)loc = torch.cat([loc_w.unsqueeze(0), loc_h.unsqueeze(0)], 0)return locclass heatmap_generator(torch.utils.data.Dataset):def __init__(self, size=(h, w), sigma=2, num=1000, is_train=True, uniform=False, seed=0, coordadd=False):super().__init__()self.dataset_size = numself.heatmap_size = sizeself.sigma = sigmaself.is_train = is_trainself.uniform = uniformself.coordadd = coordaddself.generator(seed, num)def generator(self,seed,num):torch.manual_seed(seed)np.random.seed(seed)self.db = []for i in range(num):heatmap = np.zeros(shape=self.heatmap_size, dtype=np.float32)if self.uniform:y = np.random.randint(self.heatmap_size[0])x = np.random.randint(self.heatmap_size[1])elif self.is_train:if np.random.rand() < 1/3: # 1/3 probability: fall in this areax = np.random.randint(0, self.heatmap_size[1]/2)y = np.random.randint(self.heatmap_size[0]/2, self.heatmap_size[0])else:x = np.random.randint(self.heatmap_size[1])y = np.random.randint(self.heatmap_size[0]/2) else:y = np.random.randint(self.heatmap_size[0]/2, self.heatmap_size[0])x = np.random.randint(self.heatmap_size[1]/2, self.heatmap_size[1])heatmap[y,x] = 1
# heatmap = gaussian(heatmap, sigma=self.sigma)
# heatmap /= np.amax(heatmap)self.db.append({'heatmap':heatmap,'pos': [x,y] #[x/self.heatmap_size[1],y/self.heatmap_size[0]]})def __len__(self,):return self.dataset_sizedef __getitem__(self, idx):heatmap = self.db[idx]['heatmap']heatmap = torch.as_tensor(heatmap, dtype=torch.float32)pos = self.db[idx]['pos']pos = torch.as_tensor(pos, dtype=torch.float32)if self.coordadd:loc = position(heatmap.size(0), heatmap.size(1))heatmap = torch.cat([heatmap.unsqueeze(0), loc], dim=0) # [3,h,w]return heatmap, posimport matplotlib.pyplot as pltx=heatmap_generator(num=2, seed=0, is_train=True, coordadd=True)
d, _ = x[0]
d = d.numpy()
print(d.shape)
figs, axs = plt.subplots(1,3)
axs.flat[0].imshow(d[0], cmap='jet')
axs.flat[1].imshow(d[1], cmap='jet')
axs.flat[2].imshow(d[2], cmap='jet')
plt.show()
(3, 64, 64)
![]()
上面三幅图从左至右分别是:
- 构造的表示坐标位置的One-hot heatmap编码;
- 在x方向上的坐标信息嵌入,取值在[-1,1]
- 在y方向上的坐标信息嵌入,取值在[-1,1]
MLP预测坐标的能力怎么样
一开始,我们最直接的想法就是,构造一个简单的多层感知机MLP做直接的映射:从one-hot heatmap 到 (x,y)(x,y)(x,y)。
代码很简单:
class net(nn.Module):def __init__(self, input_dim, h, output_dim):super().__init__()self.l = nn.Sequential(nn.Linear(input_dim, h),nn.LayerNorm(h),nn.ReLU(),nn.Linear(h, h),nn.LayerNorm(h),nn.ReLU(),nn.Linear(h, output_dim),)def forward(self, x):x = x.flatten(1)return self.l(x).sigmoid()
然后我们用Uniform的数据集划分进行训练测试。结果如下:
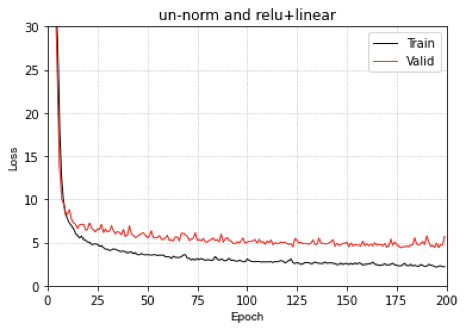
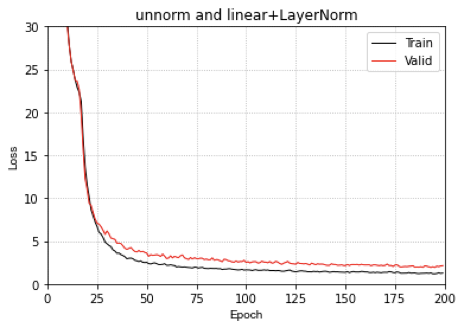
我们看一下MLP在Uniform数据集划分上的预测结果
左图是数据集的位置的真实分布(红色是Train set,蓝色是test set),右图是MLP的预测结果。
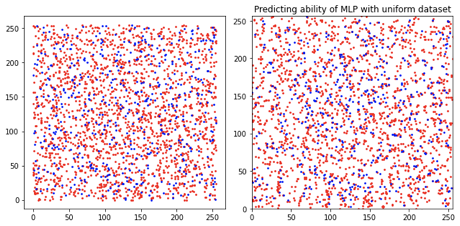
从上面的结果上来看,对于一致分布的数据集,整体上,MLP的表现似乎还可以,
那如果换成Quarter Split划分的数据集会怎么样呢?
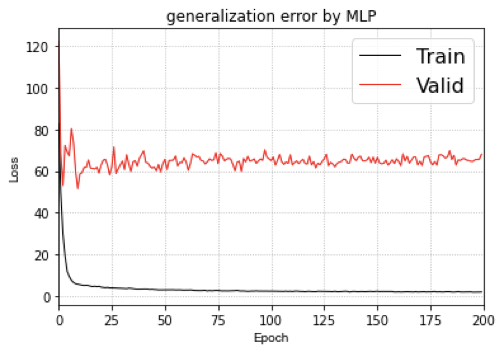
好像MLP就无法具备泛化特性了矣?
Traing loss和Valid loss(就是test集合)的差距(泛化误差)很大,
我们再看看预测的结果。
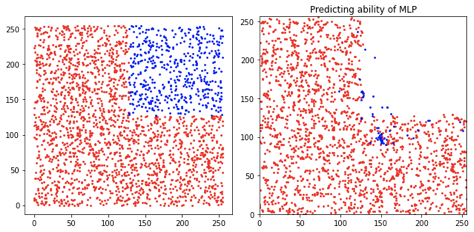
左图是数据集的位置的真实分布(红色是Train set,蓝色是test set),右图是MLP的预测结果。
这一结果更加印证了,MLP完全只是过拟合了Train set,而不真正具备了***位置预测***的能力。
而对于Uniform的数据集的样本分布,Test和Train的分布几乎一致,MLP所谓的预测坐标,只是因为它“见过”类似的样本,“学习了”它该输出什么才能“满足loss小的需求”!
那我们是不是可以给MLP加入坐标嵌入技术来改进提升其泛化能力?
CoordMLP 怎么样?
import torch.nn as nn
import os
class net(nn.Module):def __init__(self, input_dim, h, output_dim):super().__init__()self.l = nn.Sequential(nn.Linear(input_dim, h),nn.LayerNorm(h),nn.ReLU(),nn.Linear(h, h),nn.LayerNorm(h),nn.ReLU(),nn.Linear(h, output_dim),)def forward(self, x):x = x.flatten(1)return self.l(x).sigmoid()class convnet(nn.Module):def __init__(self, img_size, h, output_dim):super().__init__()self.conv = nn.Conv2d(3,h,kernel_size=3,padding=1)dim = img_size[0]*img_size[1]*hself.l = nn.Sequential(nn.Linear(dim, h),nn.LayerNorm(h),nn.ReLU(),nn.Linear(h, h),nn.LayerNorm(h),nn.ReLU(),nn.Linear(h, output_dim),)def forward(self, x):return self.l(x).sigmoid()os.environ['CUDA_VISIBLE_DEVICES'] = "0,1"train_set = heatmap_generator(num=2000, seed=0, is_train=True, coordadd=True)
valid_set = heatmap_generator(num=500, seed=1, is_train=False, coordadd=True)
test_set = heatmap_generator(num=1000, seed=2, is_train=False, coordadd=True)train_loader = torch.utils.data.DataLoader(train_set, batch_size=64, drop_last=False, shuffle=True)
valid_loader = torch.utils.data.DataLoader(valid_set, batch_size=64, drop_last=False)
test_loader = torch.utils.data.DataLoader(test_set, batch_size=64, drop_last=False)length = 3*h*w
model = net(length, 256, 2).cuda()
epochs = 200
criterion = nn.L1Loss(reduction='mean').cuda()optimizer = torch.optim.Adam(model.parameters(), lr=0.001)train_losses = []
valid_losses = []
for e in range(epochs):model.train()t = 0n1 = 0for id, (heatmaps, coords) in enumerate(train_loader):heatmaps, coords = heatmaps.cuda(), coords.cuda()optimizer.zero_grad()out = model(heatmaps)wh = torch.tensor([w,h]).unsqueeze(0).to(out.device) out = out*whcoords[:,0] = coords[:,0] * wcoords[:,1] = coords[:,1] * hloss = criterion(out, coords)loss.backward()optimizer.step()t +=loss.item()n1 +=1if id%5 ==0:print("[{}/{}]:train loss:{:.3f}".format(e,id,loss.item()))train_losses.append(t/n1)v = 0n2 = 0model.eval()for id, (heatmaps, coords) in enumerate(valid_loader):heatmaps, coords = heatmaps.cuda(), coords.cuda()out = model(heatmaps)wh = torch.tensor([w,h]).unsqueeze(0).to(out.device) out = out*wh coords[:,0] = coords[:,0] * wcoords[:,1] = coords[:,1] * hloss = criterion(out, coords)v +=loss.item()n2 +=1if id%5 ==0:print("[{}/{}]:valid loss:{:.3f}".format(e,id,loss.item()))valid_losses.append(v/n2)
[0/0]:train loss:66.604
[0/5]:train loss:56.174
[0/10]:train loss:62.741
[0/15]:train loss:61.951
[0/20]:train loss:54.515
[0/25]:train loss:56.364
[0/30]:train loss:56.916
[0/0]:valid loss:85.686
[0/5]:valid loss:86.086
[1/0]:train loss:55.726
[1/5]:train loss:62.358
[1/10]:train loss:65.846
[1/15]:train loss:59.389
[1/20]:train loss:62.986
[1/25]:train loss:63.098
[1/30]:train loss:58.376
[1/0]:valid loss:93.375
[1/5]:valid loss:93.775
[2/0]:train loss:61.380
[2/5]:train loss:61.412
[2/10]:train loss:58.127
[2/15]:train loss:60.215
[2/20]:train loss:59.366
[2/25]:train loss:58.879
[2/30]:train loss:60.355
[2/0]:valid loss:91.508
[2/5]:valid loss:91.908
[3/0]:train loss:60.517
[3/5]:train loss:55.383
[3/10]:train loss:63.124
[3/15]:train loss:56.669
[3/20]:train loss:62.911
[3/25]:train loss:62.907
[3/30]:train loss:51.110
[3/0]:valid loss:87.514
[3/5]:valid loss:87.915
[4/0]:train loss:54.624
[4/5]:train loss:59.512...............
[194/20]:train loss:13.425
[194/25]:train loss:8.053
[194/30]:train loss:19.025
[194/0]:valid loss:77.454
[194/5]:valid loss:76.766
[195/0]:train loss:28.187
[195/5]:train loss:19.203
[195/10]:train loss:9.961
[195/15]:train loss:8.364
[195/20]:train loss:17.076
[195/25]:train loss:20.528
[195/30]:train loss:8.590
[195/0]:valid loss:80.181
[195/5]:valid loss:80.544
[196/0]:train loss:10.859
[196/5]:train loss:9.294
[196/10]:train loss:19.587
[196/15]:train loss:23.072
[196/20]:train loss:9.886
[196/25]:train loss:20.046
[196/30]:train loss:17.368
[196/0]:valid loss:98.249
[196/5]:valid loss:98.891
[197/0]:train loss:17.661
[197/5]:train loss:16.903
[197/10]:train loss:16.224
[197/15]:train loss:14.529
[197/20]:train loss:12.648
[197/25]:train loss:16.197
[197/30]:train loss:20.337
[197/0]:valid loss:89.428
[197/5]:valid loss:90.051
[198/0]:train loss:8.844
[198/5]:train loss:8.096
[198/10]:train loss:5.853
[198/15]:train loss:12.344
[198/20]:train loss:7.346
[198/25]:train loss:14.299
[198/30]:train loss:20.001
[198/0]:valid loss:65.037
[198/5]:valid loss:64.701
[199/0]:train loss:13.411
[199/5]:train loss:14.213
[199/10]:train loss:10.256
[199/15]:train loss:17.550
[199/20]:train loss:19.302
[199/25]:train loss:14.925
[199/30]:train loss:14.372
[199/0]:valid loss:74.663
[199/5]:valid loss:75.049
import matplotlib as mpl
mpl.style.use('seaborn-bright')
fig = plt.figure()epochnum = list(range(0,len(train_losses)))plt.plot(epochnum, train_losses, color='black', linewidth=1)
plt.plot(epochnum, valid_losses, color='red',linewidth=1)
plt.xlabel('Epoch', fontdict={'family':'Arial'})
plt.ylabel('Loss',fontdict={'family':'Arial'})
plt.xlim(0, len(train_losses))
plt.ylim(0,100)
#plt.xticks(epochnum,100*list(epochnum) )
plt.legend(('Train','Valid'), loc='best',fontsize=16)
plt.title("generalization error with coordadd by CoordMLP")plt.grid(linestyle=':')plt.show()
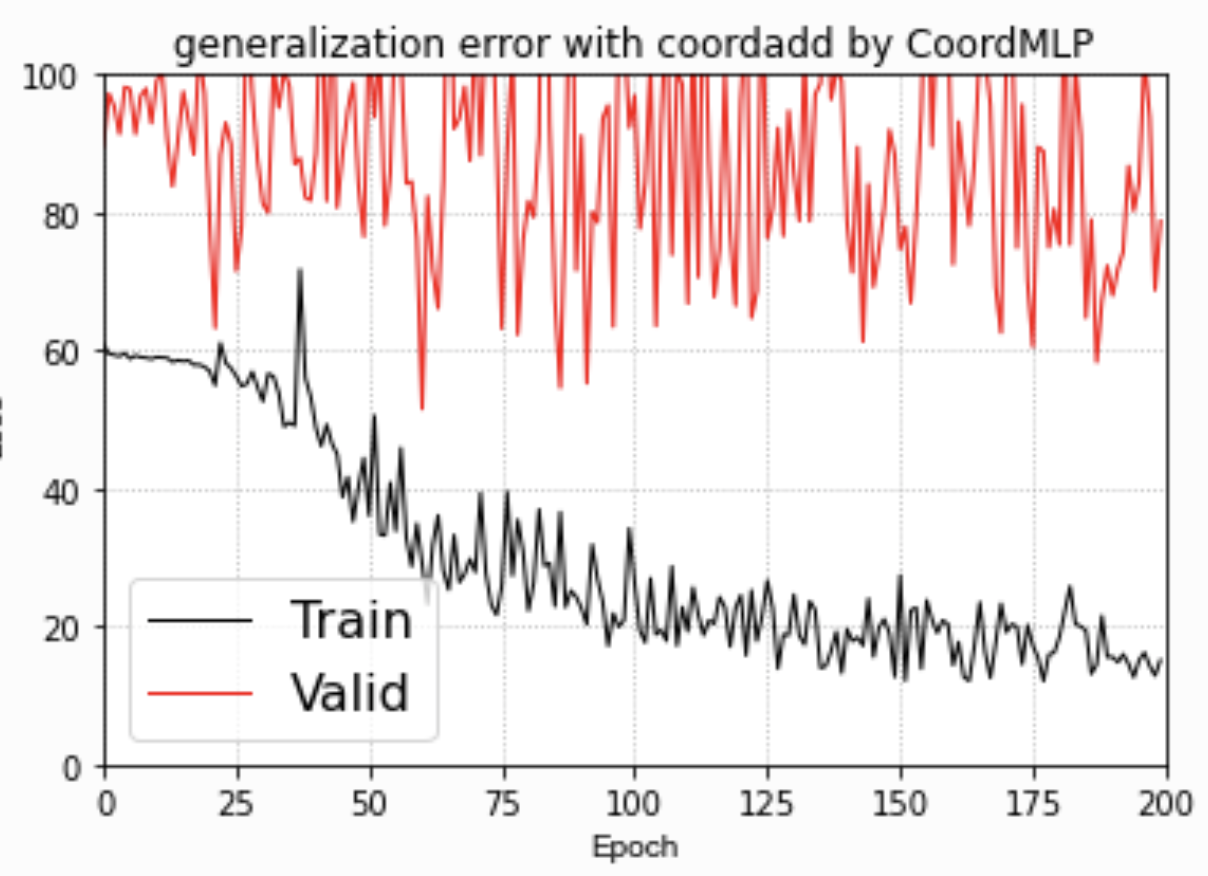
根据Loss看来,CoordMLP 嵌入坐标信息的MLP还是不具备好的泛化能力!
fig, ax1 = plt.subplots()
fig2, ax2 = plt.subplots()
print(model)for k, p in model.state_dict().items():print(k)#print(p)if 'weight' in k:layer = k.split('.')[1]for i in p:#if i.dim() > 0 :for z in range(10):ax1.scatter(layer, i[z].item(), s=1.5)else:ax1.scatter(layer, i.item(), s=1.5)if 'bias' in k:layer = k.split('.')[1]for i in p:#if i.dim() > 0 :for z in range(10):ax2.scatter(layer, i[z].item(), s=1.5)else:ax2.scatter(layer, i.item(), s=1.5)plt.show()
net((l): Sequential((0): Linear(in_features=196608, out_features=256, bias=True)(1): LayerNorm((256,), eps=1e-05, elementwise_affine=True)(2): ReLU()(3): Linear(in_features=256, out_features=256, bias=True)(4): LayerNorm((256,), eps=1e-05, elementwise_affine=True)(5): ReLU()(6): Linear(in_features=256, out_features=2, bias=True))
)
l.0.weight
l.0.bias
l.1.weight
l.1.bias
l.3.weight
l.3.bias
l.4.weight
l.4.bias
l.6.weight
l.6.bias
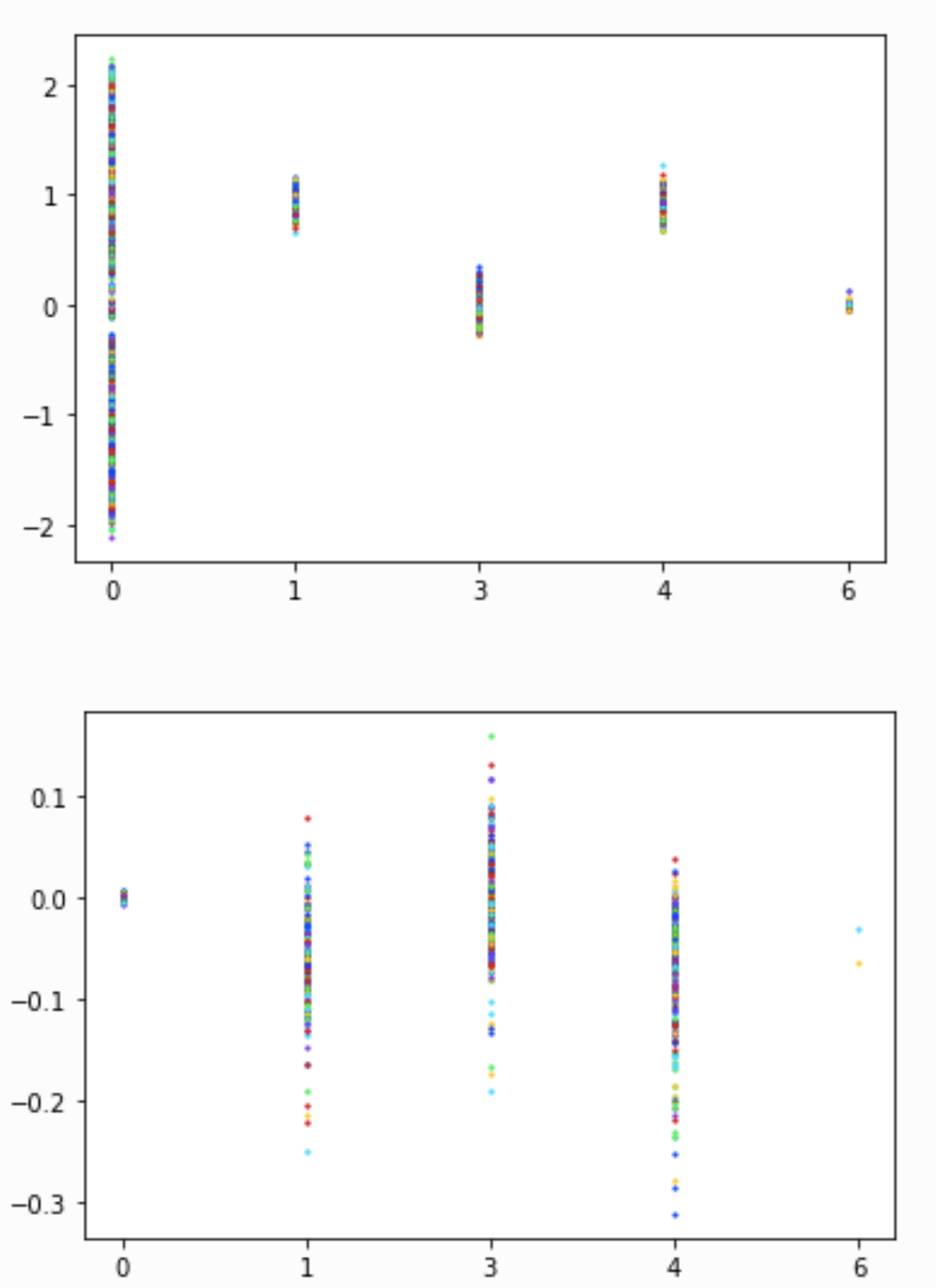
可视化MLP的权重参数
通过可视化MLP权重参数的取值,我们发现了不同层的取值范围的分布是不同的
但是并没有获得什么有意义的信息和解释
train_set = heatmap_generator(num=2000, seed=0, uniform=True)
valid_set = heatmap_generator(num=500, seed=1, uniform=True)fig, ax = plt.subplots(1, 2)for heatmap, pos in train_set:x = pos[0]*wy = pos[1]*hax[0].scatter(x, y, c='red', s=3)for heatmap, pos in valid_set:x = pos[0]*wy = pos[1]*hax[0].scatter(x, y, c='blue', s=3)plt.xlim(0, w)
plt.ylim(0, h)
plt.show()
train_set = heatmap_generator(num=2000, seed=0, is_train=True, coordadd=True)
valid_set = heatmap_generator(num=500, seed=1, is_train=False, coordadd=True)fig, ax = plt.subplots(1, 2, figsize=(9, 4.5), tight_layout=True)model.cuda()for heatmap, pos in train_set:x = pos[0]y = pos[1]ax[0].scatter(x, y, c='red', s=3)out = model(heatmap.flatten(0).unsqueeze(0).cuda()).squeeze().detach().cpu().numpy()x = out[0]y = out[1]ax[1].scatter(x, y, c='red', s=3)for heatmap, pos in valid_set:x = pos[0]y = pos[1]ax[0].scatter(x, y, c='blue', s=3)out = model(heatmap.flatten(0).unsqueeze(0).cuda()).squeeze().detach().cpu().numpy()x = out[0]y = out[1]ax[1].scatter(x, y, c='blue', s=3)plt.xlim(0, w)
plt.ylim(0, h)
plt.title("Unable to predict coords with coordadd by CoordMLP")
plt.show()
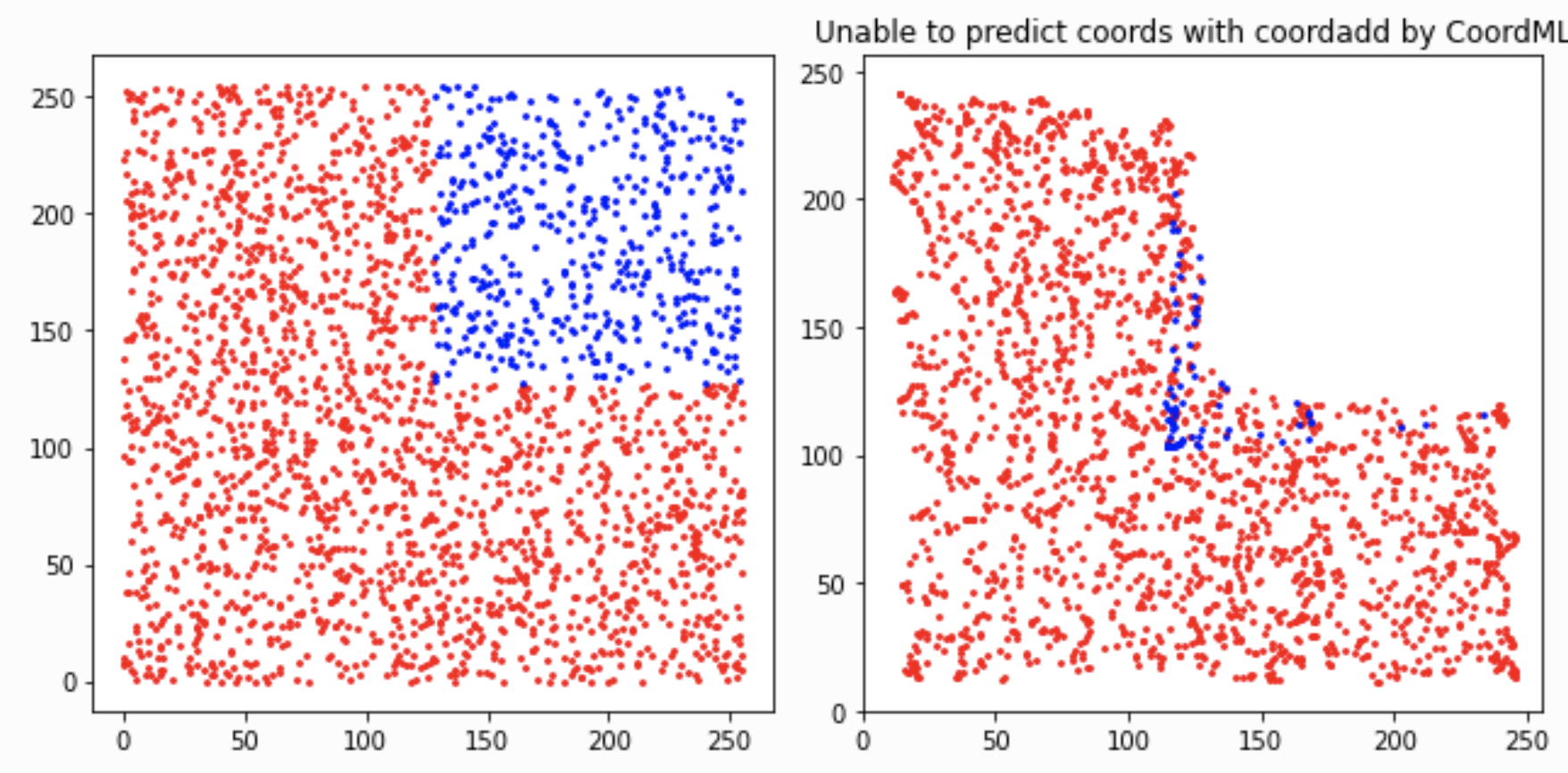
嵌入坐标信息的CoordMLP 像单纯的MLP一样,好像也不具备预测坐标的泛化性能
把heatmap嵌入Coordinate Maps,然后Flatten,然后送进MLP中,模型可以在训练集上预测得很好,但是却不具备泛化能力。可以看到,这种训练和验证集的Quart split划分方式还是非常有趣,并且是有难度的。
CoordConv 怎么样呢?
接下来我用PyTorch复现下面这个论文的部分内容。
An Intriguing Failing of Convolutional Neural Networks and the CoordConv Solution论文提出了一种坐标嵌入的方法
我们根据论文官方放出的Tensorflow代码,用PyTorch严格按照其网络结构重写。训练的优化器、学习率及其weight decay也尽可能和它保持一致。
import torch
import torch.nn as nn
import torch.nn.functional as F
import os
from coordconv import CoordConv1d, CoordConv2d, CoordConv3dclass convnet1(nn.Module):def __init__(self):super(convnet1, self).__init__()self.coordconv = CoordConv2d(1, 8, 1, with_r=True)self.conv1 = nn.Conv2d(8, 8, 1)self.conv2 = nn.Conv2d(8, 8, 1)self.conv3 = nn.Conv2d(8, 8, 1)self.conv4 = nn.Conv2d(8, 8, 3, padding=1)self.conv5 = nn.Conv2d(8, 2, 3, padding=1)self.pool = nn.MaxPool2d(kernel_size=64, stride=64)def forward(self, x):x = x.unsqueeze(1)x = self.coordconv(x)x = self.conv1(x)x = self.conv2(x)x = self.conv3(x)x = self.conv4(x)x = self.conv5(x)x = self.pool(x) # [bs, 2, 1, 1]x = x.squeeze()return xos.environ['CUDA_VISIBLE_DEVICES'] = "0"train_set = heatmap_generator(num=2000, seed=0, is_train=True,) # coordadd=True)
valid_set = heatmap_generator(num=500, seed=1, is_train=False,) # coordadd=True)
test_set = heatmap_generator(num=1000, seed=2, is_train=False,) # coordadd=True)train_loader = torch.utils.data.DataLoader(train_set, batch_size=256, drop_last=False, shuffle=True)
valid_loader = torch.utils.data.DataLoader(valid_set, batch_size=32, drop_last=False)
test_loader = torch.utils.data.DataLoader(test_set, batch_size=32, drop_last=False)model = convnet1().cuda()
epochs = 1000
criterion = nn.MSELoss(reduction='mean').cuda()optimizer = torch.optim.Adam(model.parameters(), lr=0.01, weight_decay=0.00001)train_losses = []
valid_losses = []
for e in range(epochs):model.train()t = 0n1 = 0for id, (heatmaps, coords) in enumerate(train_loader):heatmaps, coords = heatmaps.cuda(), coords.cuda()optimizer.zero_grad()out = model(heatmaps)loss = criterion(out, coords)loss.backward()optimizer.step()t +=loss.item()n1 +=1if id%100 ==0:print("[{}/{}]:train loss:{:.3f}".format(e,id,loss.item()))train_losses.append(t/n1)v = 0n2 = 0model.eval()for id, (heatmaps, coords) in enumerate(valid_loader):heatmaps, coords = heatmaps.cuda(), coords.cuda()out = model(heatmaps)loss = criterion(out, coords)v +=loss.item()n2 +=1if id%100 ==0:print("[{}/{}]:valid loss:{:.3f}".format(e,id,loss.item()))valid_losses.append(v/n2)
[0/0]:train loss:1027.723
[0/0]:valid loss:658.191
[1/0]:train loss:340.205
[1/0]:valid loss:882.184
[2/0]:train loss:382.191
[2/0]:valid loss:364.457
[3/0]:train loss:344.636
[3/0]:valid loss:629.423
[4/0]:train loss:343.474
[4/0]:valid loss:511.996
[5/0]:train loss:310.839
[5/0]:valid loss:521.019
[6/0]:train loss:330.839
[6/0]:valid loss:530.305
[7/0]:train loss:310.050
[7/0]:valid loss:500.017
[8/0]:train loss:313.915
[8/0]:valid loss:526.495
[9/0]:train loss:335.083
[9/0]:valid loss:578.623
[10/0]:train loss:321.808
[10/0]:valid loss:590.830
[11/0]:train loss:332.714
[11/0]:valid loss:520.583
[12/0]:train loss:315.320
[12/0]:valid loss:506.796
[13/0]:train loss:329.973
[13/0]:valid loss:516.331
[14/0]:train loss:296.927
[14/0]:valid loss:440.843
[15/0]:train loss:319.363
[15/0]:valid loss:565.522
[16/0]:train loss:339.193
[16/0]:valid loss:630.012
[17/0]:train loss:319.562
[17/0]:valid loss:588.987
[18/0]:train loss:325.077
[18/0]:valid loss:555.196
[19/0]:train loss:324.888
[19/0]:valid loss:504.099
[20/0]:train loss:328.839
[20/0]:valid loss:501.208
[21/0]:train loss:322.016
…
…
[489/0]:train loss:313.746
[489/0]:valid loss:498.646
[490/0]:train loss:331.695
[490/0]:valid loss:570.283
[491/0]:train loss:308.808
[491/0]:valid loss:543.668
[492/0]:train loss:331.526
[492/0]:valid loss:609.543
[493/0]:train loss:314.055
[493/0]:valid loss:530.251
[494/0]:train loss:303.886
[494/0]:valid loss:557.143
[495/0]:train loss:321.458
[495/0]:valid loss:543.295
[496/0]:train loss:311.247
[496/0]:valid loss:497.568
[497/0]:train loss:326.582
[497/0]:valid loss:515.231
[498/0]:train loss:333.465
[498/0]:valid loss:553.942
[499/0]:train loss:308.450
[499/0]:valid loss:573.775
[500/0]:train loss:304.610
[500/0]:valid loss:585.026
[501/0]:train loss:325.851
[501/0]:valid loss:577.704
[502/0]:train loss:313.319
[502/0]:valid loss:510.165
[503/0]:train loss:301.331
[503/0]:valid loss:563.254
[504/0]:train loss:294.513
[504/0]:valid loss:550.867
[505/0]:train loss:337.322
[505/0]:valid loss:405.499
[506/0]:train loss:210.640
[506/0]:valid loss:440.354
[507/0]:train loss:177.821
[507/0]:valid loss:372.500
[508/0]:train loss:152.111
[508/0]:valid loss:314.090
[509/0]:train loss:150.206
[509/0]:valid loss:531.095
[510/0]:train loss:131.546
[510/0]:valid loss:320.094
[511/0]:train loss:124.478
[511/0]:valid loss:348.056
[512/0]:train loss:82.704
[512/0]:valid loss:138.187
[513/0]:train loss:93.763
[513/0]:valid loss:59.943
[514/0]:train loss:28.917
[514/0]:valid loss:83.261
[515/0]:train loss:26.591
[515/0]:valid loss:103.014
[516/0]:train loss:20.655
[516/0]:valid loss:90.283
[517/0]:train loss:14.670
[517/0]:valid loss:86.509
[518/0]:train loss:7.979
[518/0]:valid loss:81.485
[519/0]:train loss:5.293
[519/0]:valid loss:82.389
[520/0]:train loss:6.404
[520/0]:valid loss:79.925
[521/0]:train loss:4.992
[521/0]:valid loss:73.615
[522/0]:train loss:2.514
[522/0]:valid loss:68.852
[523/0]:train loss:3.168
[523/0]:valid loss:61.463
[524/0]:train loss:2.194
[524/0]:valid loss:58.418
[525/0]:train loss:3.485
[525/0]:valid loss:55.320
[526/0]:train loss:2.697
[526/0]:valid loss:46.612
[527/0]:train loss:4.031
[527/0]:valid loss:42.675
[528/0]:train loss:3.537
[528/0]:valid loss:35.026
[529/0]:train loss:2.433
[529/0]:valid loss:21.490
[530/0]:train loss:1.950
[530/0]:valid loss:6.599
[531/0]:train loss:1.498
[531/0]:valid loss:0.874
[532/0]:train loss:0.641
[532/0]:valid loss:0.786
[533/0]:train loss:1.632
[533/0]:valid loss:0.256
[534/0]:train loss:0.318
[534/0]:valid loss:1.699
[535/0]:train loss:3.042
[535/0]:valid loss:1.706
[536/0]:train loss:1.189
[536/0]:valid loss:1.651
[537/0]:train loss:4.311
[537/0]:valid loss:1.211
[538/0]:train loss:2.011
[538/0]:valid loss:4.156
[539/0]:train loss:2.527
[539/0]:valid loss:1.380
[540/0]:train loss:1.754
[540/0]:valid loss:7.980
[541/0]:train loss:4.717
[541/0]:valid loss:7.452
[542/0]:train loss:2.004
[542/0]:valid loss:0.953
[543/0]:train loss:1.676
[543/0]:valid loss:0.460
[544/0]:train loss:1.610
[544/0]:valid loss:0.386
[545/0]:train loss:0.336
[545/0]:valid loss:0.584
…
…
[992/0]:train loss:0.056
[992/0]:valid loss:0.034
[993/0]:train loss:0.034
[993/0]:valid loss:0.043
[994/0]:train loss:0.051
[994/0]:valid loss:0.050
[995/0]:train loss:0.041
[995/0]:valid loss:0.061
[996/0]:train loss:0.108
[996/0]:valid loss:0.389
[997/0]:train loss:0.539
[997/0]:valid loss:0.133
[998/0]:train loss:0.250
[998/0]:valid loss:0.107
[999/0]:train loss:0.247
[999/0]:valid loss:1.734
import matplotlib as mpl
mpl.style.use('seaborn-bright')
fig = plt.figure()epochnum = list(range(0,len(train_losses)))plt.plot(epochnum, train_losses, color='black', linewidth=1)
plt.plot(epochnum, valid_losses, color='red',linewidth=1)
plt.xlabel('Epoch', fontdict={'family':'Arial'})
plt.ylabel('Loss',fontdict={'family':'Arial'})
plt.xlim(0, len(train_losses))plt.legend(('Train','Valid'), loc='best',fontsize=16)
plt.title("generalization error with coordadd by CoordConv")plt.grid(linestyle=':')plt.show()
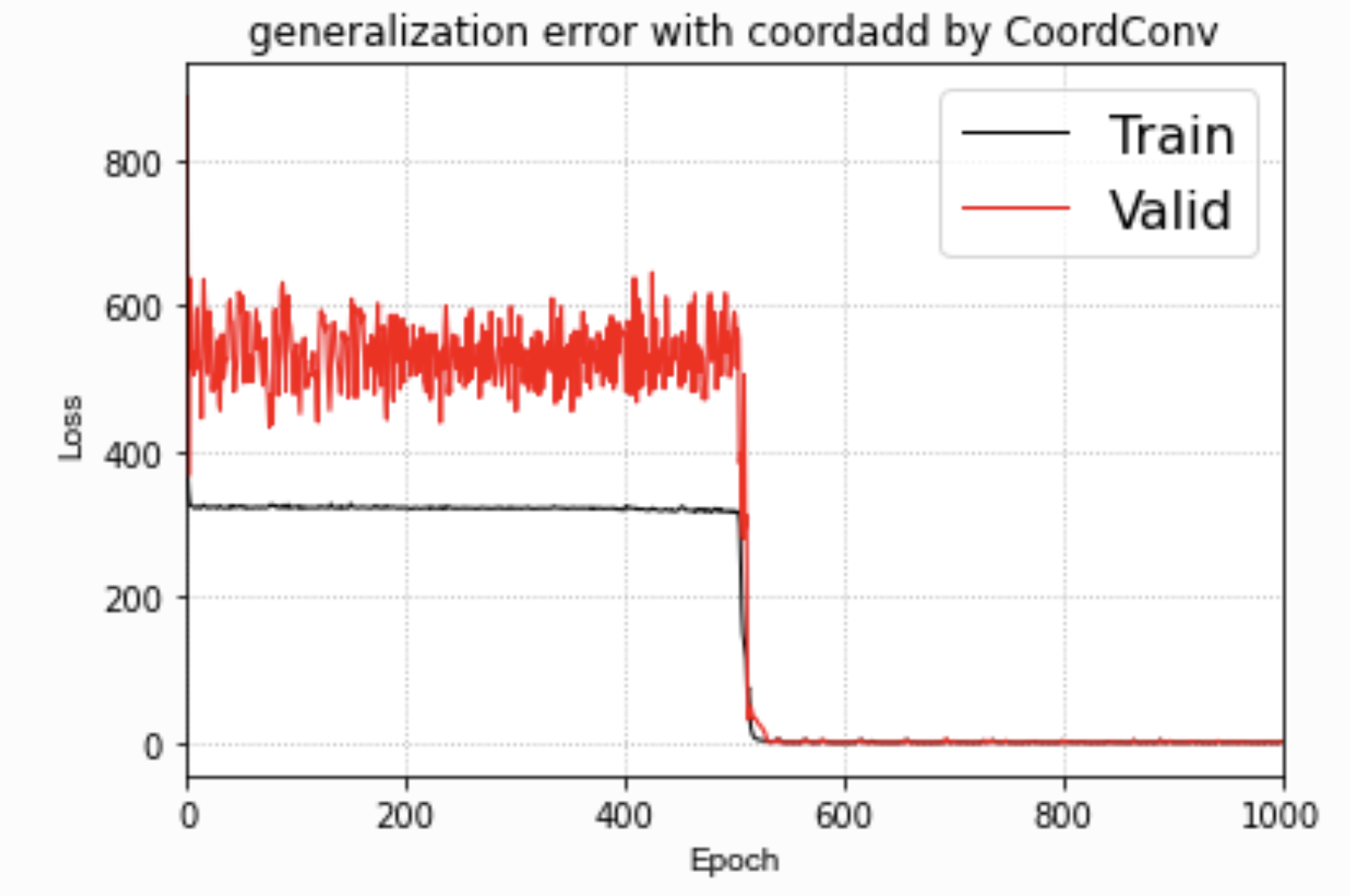 ### 我有了一个神奇的发现,在500个周期后,train和test loss开始急速收敛!?
### 我有了一个神奇的发现,在500个周期后,train和test loss开始急速收敛!?
500个周期时,训练loss和验证的loss,开始极速下降!
我怀疑这个代价函数的优化曲面有一个非常难以跳出的局部最优解,因为我的训练集和验证集的数据分布之间有一个非常明显的GAP!
如果能有人看到这个, 对这个问题有自己的见解,欢迎和我探讨!
fig, ax = plt.subplots(1, 2, figsize=(9, 4.5), tight_layout=True)model.cuda()for heatmap, pos in train_set:x = pos[0]y = pos[1]ax[0].scatter(x, y, c='red', s=3)out = model(heatmap.unsqueeze(0).cuda()).squeeze().detach().cpu().numpy()x = out[0]y = out[1]ax[1].scatter(x, y, c='red', s=3)for heatmap, pos in valid_set:x = pos[0]y = pos[1]ax[0].scatter(x, y, c='blue', s=3)out = model(heatmap.unsqueeze(0).cuda()).squeeze().detach().cpu().numpy()x = out[0]y = out[1]ax[1].scatter(x, y, c='blue', s=3)plt.xlim(0, w)
plt.ylim(0, h)
plt.title("Unable to predict coords with coordadd by CoordMLP")
plt.show()
我们继续看一看CoordConv预测的坐标实际是什么样的。
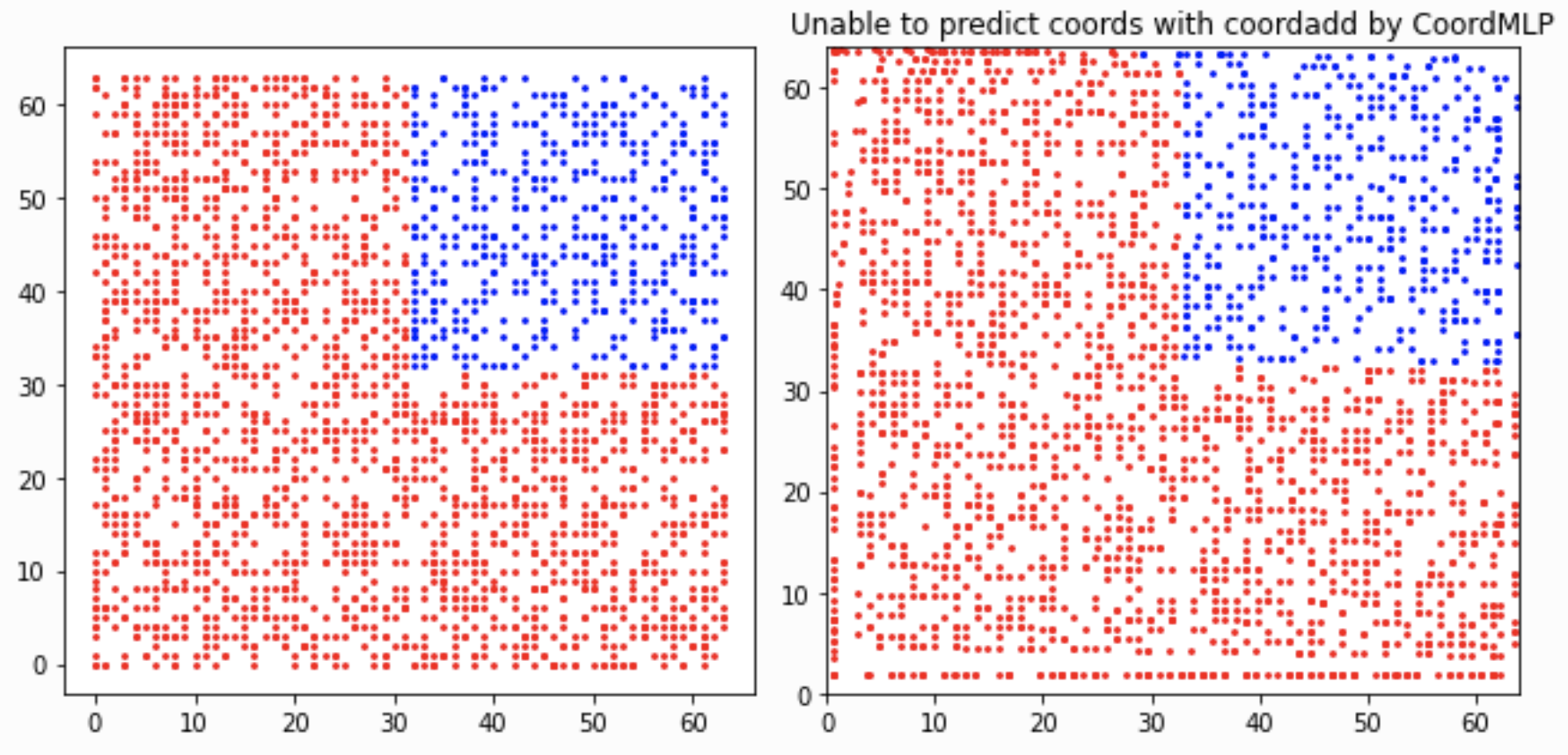
很明显,这个CoordConv的网络具备了非常神奇的预测位置的能力。
并且获取这个坐标回归能力是突然在某个周期获得的!!!
我个人猜测,这个代价函数的优化曲面有一个很深的局部最小值点。Adam不断积累的梯度跳出了它。PS:这个问题在我用了更小的权重衰减之后,就解决了,CoordConv很快收敛。
论文回顾
In this work, we expose and analyze a generic inability of CNNs to transform spatial representations between two different types: from a dense Cartesian representation to a sparse, pixel-based represen- tation or in the opposite direction. Though such transformations would seem simple for networks to learn, it turns out to be more difficult than expected, at least when models are comprised of the commonly used stacks of convolutional layers. While straightforward stacks of convolutional layers excel at tasks like image classification, they are not quite the right model for coordinate transform.
Throughout the rest of the paper, we examine the coordinate transform problem starting with the simplest scenario and ending with the most complex. Although results on toy problems should generally be taken with a degree of skepticism, starting small allows us to pinpoint the issue, exploring and understanding it in detail. Later sections then show that the phenomenon observed in the toy domain indeed appears in more real-world settings.
We begin by showing that coordinate transforms are surprisingly difficult even when the problem is small and supervised. In the Supervised Coordinate Classification task, given a pixel’s (x, y) coordinates as input, we train a CNN to highlight it as output. The Supervised Coordinate Regression task entails the inverse: given an input image containing a single white pixel, output its coordinates. We show that both problems are harder than expected using convolutional layers but become trivial by using a CoordConv layer (Section 4).
Some Tricks and Visualizations:
我改进CoordConv时用到了以下的一些Tricks:
- 在靠近网络输出层之前,增加CoordConv层能够显著提升收敛速度
- 坐标归一化
- 数值尺度控制(可以获得更强的泛化特性,即对于未见到不同大小的Heatmap具备泛化特性!)
CoordConv在相同优化条件下,只用了100个周期内就很快收敛,并且获得了很强的泛化能力。
还进行了
- pooling前 map的可视化
- CoordConv在不同大小的one-hot heatmap的数据集的泛化能力测试
本文正文到此结束,后面还会继续研究,欢迎讨论,可联系我的邮箱yangsenius@seu.edu.cn
【本人原创,转发、引用请注明来源】:
「Sen Yang. The findings on CoordConv technique. https://senyang-ml.github.io/2020/09/22/coordconv/, 2020」
My findings:CoordConv坐标嵌入技术及其泛化性能相关推荐
- 前沿综述:细数2018年最好的词嵌入和句嵌入技术
from:http://3g.163.com/dy/article/DJRJDB9S0511D05M.html 在任何一种基于深度学习的自然语言处理系统中,词嵌入和句子嵌入已成为重要组成部分.它们使用 ...
- 【推荐系统】基于图嵌入技术的推荐系统长文综述
|作者:邓月 | 单位:电子科技大学 | 研究方向:图嵌入技术.推荐系统 近几年,基于图嵌入技术的推荐系统已成为一个热门的研究焦点,并将随着图嵌入技术的不断发展而持续.近日发布的<基于图嵌入技术 ...
- 用Visual C++实现远程线程嵌入技术
用Visual C++实现远程线程嵌入技术 远程线程技术指的是通过在另一个进程中创建远程线程的方法进入那个进程的内存地址空间.我们知道,在进程中,可以通过CreateThread函数创建线程,被创建的 ...
- python词嵌入_【自然语言处理】收藏!使用Python的4种句嵌入技术
人类理解语言细微差别的能力是非常强大的--我们敏锐的大脑可以在一句话里轻易地感受到幽默.讽刺.负面情绪等,但发挥这个"超能力"的前提是,我们必须知道话语所使用的语言. 例如,如果有 ...
- 技术动态 | 「知识图谱嵌入技术研究」最新2022综述
转载公众号 | 专知 知识图谱(KG)是一种用图模型来描述知识和建模事物之间关联关系的技术. 知识图谱嵌入(KGE)作为一 种被广泛采用的知识表示方法,其主要思想是将知识图谱中的实体和关系嵌入到连续的 ...
- YOLOS:重新思考Transformer的泛化性能
点击上方"视学算法",选择加"星标"或"置顶" 重磅干货,第一时间送达 作者丨happy 审稿丨邓富城 编辑丨极市平台 导读 本文是华科&a ...
- 速度、准确率与泛化性能媲美SOTA CNN,Facebook开源高效图像Transformer
机器之心报道 参与:魔王.小舟.杜伟 将自然语言处理领域主流模型 Transformer 应用在视觉领域似乎正在成为趋势.最近,Facebook 研究人员提出一项新技术--数据高效图像 Transfo ...
- Facebook开源高效图像Transformer,速度、准确率与泛化性能媲美SOTA CNN
点击上方"小白学视觉",选择加"星标"或"置顶" 重磅干货,第一时间送达 转自 | 机器之心 将自然语言处理领域主流模型 Transform ...
- 深度丨如何理解和评价机器学习中的表达能力、训练难度和泛化性能
来源: Eric Jang 的个人博客 非常感谢王家兴 (Jiaxing Wang) 把这个博客文章翻译成中文. 当我在阅读机器学习相关文献的时候, 我经常思考这项工作是否: 提高了模型的表达能力: ...
最新文章
- 【数据库】sqlite3数据库备份、导出方法汇总
- mysql下载为csv_MySQL 查询结果保存为CSV文件
- @Autowired使用
- 并发容器CopyOnWriteArrayList
- R语言编程艺术#01#数据类型向量(vector)
- 淘宝NPM镜像、cnmp
- 鸿蒙思维和小央美,北市场附近艺术培训
- Spring中HibernateTemplate类的使用
- 计算机软件总体上分为,山大2017春季班期末考试 信息系统B
- YzmCMS全新轻爽极简风格模版主题
- webpack 的 scope hoisting 是什么?
- Mariadb----字符类型 (五)
- 程序员应该收藏哪些资讯类网站
- Linux命令详解词典高频命令(三)
- three.js实现球体地球城市模拟迁徙
- 利用Visio DIY自己的示意图
- liang-barsky_C和C ++中的Liang Barsky线裁剪算法
- 优化计算机组策略,windows系统优化--使你的计算机飞起来
- android 一个比较好的CoolRefreshView 上啦下拉刷新
- python爬虫从入门到实践pdf百度云_PYTHON网络爬虫从入门到实践.pdf