pytorch+yolov3(4)
参考: https://blog.paperspace.com/how-to-implement-a-yolo-v3-object-detector-from-scratch-in-pytorch-part-4/
如何在PyTorch中从头开始实现YOLO(v3)对象检测器:第4部分
图片来源:Karol Majek。在这里查看他的YOLO v3实时检测视频
这是从头开始实现YOLO v3探测器的教程的第4部分。在最后一部分,我们实施了网络的前向传递。在这一部分中,我们通过对象置信度和非最大抑制来阈值检测。
本教程的代码旨在在Python 3.5和PyTorch 0.4上运行。它可以在这个Github回购中找到它的全部内容。
本教程分为5个部分:
第1部分:了解YOLO的工作原理
第2部分:创建网络体系结构的层
第3部分:实现网络的正向传递
第4部分(本例):置信度阈值和非最大抑制
第5部分:设计输入和输出管道
先决条件
- 本教程的第1-3部分。
- PyTorch的基本工作知识,包括如何使用nn.Module,nn.Sequential和torch.nn.parameter类创建自定义体系结构。
- NumPy的基础知识
如果您缺少任何正面,帖子下面有链接供您关注。
在前面的部分中,我们构建了一个模型,该模型在给定输入图像的情况下输出多个对象检测。确切地说,我们的输出是一个形状的张量B x 10647 x 85。B是批处理中的图像数,10647是每个图像预测的边界框数,85是边界框属性的数量。
但是,如第1部分所述,我们必须使输出符合对象分数阈值和非最大抑制,以获得我将在本文的其余部分中称为真实检测的内容。为此,我们将创建一个write_results在文件中调用的函数util.py
def write_results(prediction, confidence, num_classes, nms_conf = 0.4):
这些函数作为输入prediction,confidence(对象性得分阈值),num_classes(在我们的例子中为80)和nms_conf(NMS IoU阈值)。
对象置信度阈值
我们的预测张量包含有关B x 10647边界框的信息。对于具有低于阈值的对象性得分的每个边界框,我们将其每个属性(表示边界框的整行)的值设置为零。
conf_mask = (prediction[:,:,4] > confidence).float().unsqueeze(2)prediction = prediction*conf_mask
执行非最大抑制
注意:我假设您了解IoU(联合交叉)是什么,以及非最大抑制是什么。如果不是这种情况,请参阅帖子末尾的链接)。
我们现在拥有的边界框属性由中心坐标以及边界框的高度和宽度来描述。但是,使用每个盒子的一对诊断角的坐标来计算两个盒子的IoU更容易。因此,我们将框的(中心x,中心y,高度,宽度)属性转换为(左上角x,左上角y,右下角x,右下角y)。
box_corner = prediction.new(prediction.shape)box_corner[:,:,0] = (prediction[:,:,0] - prediction[:,:,2]/2)box_corner[:,:,1] = (prediction[:,:,1] - prediction[:,:,3]/2)box_corner[:,:,2] = (prediction[:,:,0] + prediction[:,:,2]/2) box_corner[:,:,3] = (prediction[:,:,1] + prediction[:,:,3]/2)prediction[:,:,:4] = box_corner[:,:,:4]
每个图像中的真实检测数可能不同。例如,批量为3的批次,其中图像1,2和3分别具有5,2,4个真实检测。因此,必须一次对一个图像进行置信度阈值处理和NMS。这意味着,我们无法对所涉及的操作进行矢量化,并且必须遍历第一维prediction(包含批处理中的图像索引)。
batch_size = prediction.size(0)write = Falsefor ind in range(batch_size):image_pred = prediction[ind] #image Tensor#confidence threshholding #NMS如前所述,writeflag用于表示我们尚未初始化output,我们将使用一个张量来收集整个批次中的真实检测。
一旦进入循环,让我们清理一下。请注意,每个边界框行有85个属性,其中80个是类别分数。此时,我们只关注具有最大值的班级分数。因此,我们从每一行中删除80个类分数,而是添加具有最大值的类的索引,以及该类的类分数。
max_conf, max_conf_score = torch.max(image_pred[:,5:5+ num_classes], 1)max_conf = max_conf.float().unsqueeze(1)max_conf_score = max_conf_score.float().unsqueeze(1)seq = (image_pred[:,:5], max_conf, max_conf_score)image_pred = torch.cat(seq, 1)
还记得我们已经将具有小于阈值的对象置信度的边界框行设置为零吗?让我们摆脱他们。
non_zero_ind = (torch.nonzero(image_pred[:,4]))try:image_pred_ = image_pred[non_zero_ind.squeeze(),:].view(-1,7)except:continue#For PyTorch 0.4 compatibility
#Since the above code with not raise exception for no detection
#as scalars are supported in PyTorch 0.4if image_pred_.shape[0] == 0:continue try-except块用于处理我们没有检测到的情况。在这种情况下,我们使用continue跳过此图像的循环体的其余部分。
现在,让我们在图像中检测出类。
#Get the various classes detected in the imageimg_classes = unique(image_pred_[:,-1]) # -1 index holds the class index
由于可以对同一个类进行多次真正的检测,因此我们使用一个函数调用unique来获取任何给定图像中的类。
def unique(tensor):tensor_np = tensor.cpu().numpy()unique_np = np.unique(tensor_np)unique_tensor = torch.from_numpy(unique_np)tensor_res = tensor.new(unique_tensor.shape)tensor_res.copy_(unique_tensor)return tensor_res
然后,我们按类别执行NMS。
for cls in img_classes:#perform NMS
一旦我们进入循环,我们要做的第一件事是提取特定类的检测(由变量表示cls)。
以下代码在原始代码文件中缩进了三个块,但我没有在此处缩进,因为此页面上的空间有限。
#get the detections with one particular class
cls_mask = image_pred_*(image_pred_[:,-1] == cls).float().unsqueeze(1)
class_mask_ind = torch.nonzero(cls_mask[:,-2]).squeeze()
image_pred_class = image_pred_[class_mask_ind].view(-1,7)#sort the detections such that the entry with the maximum objectness
s#confidence is at the top
conf_sort_index = torch.sort(image_pred_class[:,4], descending = True )[1]
image_pred_class = image_pred_class[conf_sort_index]
idx = image_pred_class.size(0) #Number of detections
现在,我们执行NMS。
for i in range(idx):
#Get the IOUs of all boxes that come after the one we are looking at
#in the looptry:ious = bbox_iou(image_pred_class[i].unsqueeze(0), image_pred_class[i+1:])except ValueError:breakexcept IndexError:break
#Zero out all the detections that have IoU > treshholdiou_mask = (ious < nms_conf).float().unsqueeze(1)image_pred_class[i+1:] *= iou_mask
#Remove the non-zero entriesnon_zero_ind = torch.nonzero(image_pred_class[:,4]).squeeze()image_pred_class = image_pred_class[non_zero_ind].view(-1,7)
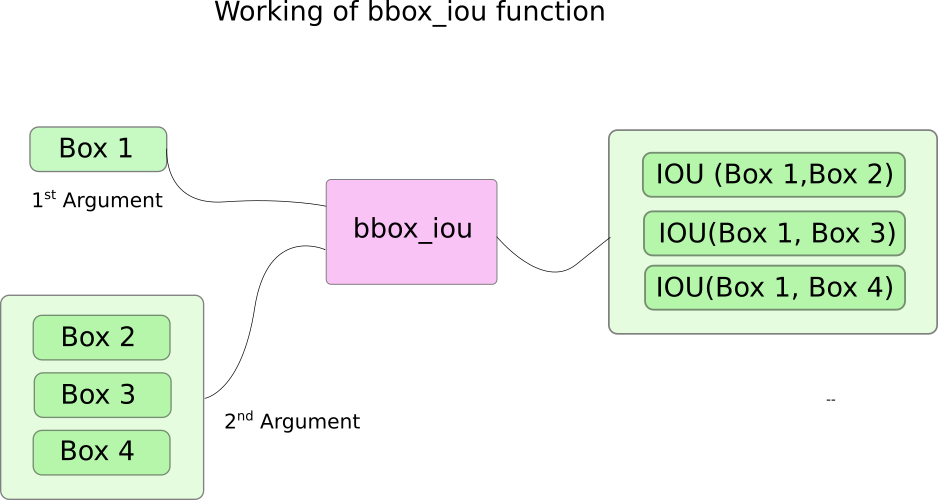
在这里,我们使用一个函数bbox_iou。第一个输入是由i循环中的变量索引的边界框行。
第二个输入bbox_iou是多行边界框的张量。函数的输出bbox_iou是包含由第一输入表示的边界框的IoU的张量,其中每个边界框存在于第二输入中。
如果我们有两个具有大于阈值的IoU的同一类的边界框,则消除具有较低类置信度的边界框。我们已经整理出了具有更高置信度的边界框。
在循环体中,以下行给出了框的IoU,索引为i所有具有高于的索引的边界框i。
ious = bbox_iou(image_pred_class[i].unsqueeze(0), image_pred_class[i+1:])
每次迭代,如果任何具有索引大于具有大于阈值i的IoU(具有索引框i)的边界框,nms_thresh则消除该特定框。
#Zero out all the detections that have IoU > treshhold
iou_mask = (ious < nms_conf).float().unsqueeze(1)
image_pred_class[i+1:] *= iou_mask #Remove the non-zero entries
non_zero_ind = torch.nonzero(image_pred_class[:,4]).squeeze()
image_pred_class = image_pred_class[non_zero_ind]
另请注意,我们已经ious在try-catch块中放置了代码行来计算。这是因为循环被设计为运行idx迭代(行数image_pred_class)。但是,当我们继续循环时,可以从中删除许多边界框image_pred_class。这意味着,即使删除了一个值image_pred_class,我们也无法进行idx迭代。因此,我们可能会尝试索引超出bounds(IndexError)的值,或者切片image_pred_class[i+1:]可能返回一个空张量,指定触发a的值ValueError。此时,我们可以确定NMS不能删除任何进一步的边界框,并且我们打破了循环。
计算IoU
这是功能bbox_iou。
def bbox_iou(box1, box2):"""Returns the IoU of two bounding boxes """#Get the coordinates of bounding boxesb1_x1, b1_y1, b1_x2, b1_y2 = box1[:,0], box1[:,1], box1[:,2], box1[:,3]b2_x1, b2_y1, b2_x2, b2_y2 = box2[:,0], box2[:,1], box2[:,2], box2[:,3]#get the corrdinates of the intersection rectangleinter_rect_x1 = torch.max(b1_x1, b2_x1)inter_rect_y1 = torch.max(b1_y1, b2_y1)inter_rect_x2 = torch.min(b1_x2, b2_x2)inter_rect_y2 = torch.min(b1_y2, b2_y2)#Intersection areainter_area = torch.clamp(inter_rect_x2 - inter_rect_x1 + 1, min=0) * torch.clamp(inter_rect_y2 - inter_rect_y1 + 1, min=0)#Union Areab1_area = (b1_x2 - b1_x1 + 1)*(b1_y2 - b1_y1 + 1)b2_area = (b2_x2 - b2_x1 + 1)*(b2_y2 - b2_y1 + 1)iou = inter_area / (b1_area + b2_area - inter_area)return iou写预测
该函数write_results输出形状D x 8的张量。这里D是所有图像中的真实检测,每个图像由一行表示。每个检测具有8个属性,即检测所属批次中的图像的索引,4个角坐标,对象得分,具有最大置信度的类的得分,以及该类的索引。
和以前一样,我们不会初始化输出张量,除非我们有一个检测分配给它。一旦初始化,我们将后续检测连接到它。我们使用该write标志来指示张量是否已经初始化。在遍历类的循环结束时,我们将结果检测添加到张量output。
batch_ind = image_pred_class.new(image_pred_class.size(0), 1).fill_(ind)
#Repeat the batch_id for as many detections of the class cls in the imageseq = batch_ind, image_pred_classif not write:output = torch.cat(seq,1)write = Trueelse:out = torch.cat(seq,1)output = torch.cat((output,out))
在函数结束时,我们检查是否output已经初始化。如果没有手段,则批次的任何图像中都没有单一检测。在那种情况下,我们返回0。
try:return outputexcept:return 0
这是这篇文章的内容。在这篇文章的最后,我们最终得到了一个张量形式的预测,它将每个预测列为行。现在唯一剩下的就是创建一个输入管道来从磁盘读取图像,计算预测,在图像上绘制边界框,然后显示/写入这些图像。这是我们将在下一部分中做的。
进一步阅读
- PyTorch教程
- 期票
- 非最大限度的抑制
- 非最大抑制
Ayoosh Kathuria目前是印度国防研究与发展组织的实习生,他正致力于改善粒状视频中的物体检测。当他不工作时,他正在睡觉或者在他的吉他上玩粉红色弗洛伊德。您可以在LinkedIn上与他联系,或者查看他在GitHub上做的更多内容
的收件箱
订阅
pytorch+yolov3(4)相关推荐
- [pytorch]yolov3.cfg参数详解(每层输出及route、yolo、shortcut层详解)
文章目录 Backbone(Darknet53) 第一次下采样(to 208) 第二次下采样(to 104) 第三次下采样(to 52) 第四次下采样(to 26) 第五次下采样(to 13) YOL ...
- Pytorch | yolov3原理及代码详解(二)
阅前可看: Pytorch | yolov3原理及代码详解(一) https://blog.csdn.net/qq_24739717/article/details/92399359 分析代码: ht ...
- Pytorch | yolov3原理及代码详解(一)
YOLO相关原理 : https://blog.csdn.net/leviopku/article/details/82660381 https://www.jianshu.com/p/d13ae10 ...
- Pytorch——YOLOv3
YOLO: Real-Time Object Detection 官方的 目标检测之 YOLOv3 (Pytorch实现) 关于YOLOv3模型(原论文作者将其称之为" ...
- 寒武纪MLU270安装运行Pytorch yolov3实录
注:本教程仅供摩米实验室内部学习适用 硬件安装 MLU270外形类似一张显卡,需要插到主板的显卡插槽上,供电有点特殊,需要把两个2×4pin的电源插口通过一个二合一的转接线,转接成一个2×4pin的插 ...
- pytorch YoLOV3 源码解析 train.py
train.py 总体分为三部分(不算import 库) 初始的一些设定 + train函数 + main函数 源码地址: https://github.com/ultralytics/yolov3 ...
- Pytorch yolov3 多GPU 训练
pytorch 多gpu训练: # -*- coding:utf-8 -*- from __future__ import divisionimport datetime import torch i ...
- pytorch yolov3 代码详解_PyTorch C++ libtorch的使用方法(1)-nightly 版本的 libtorch
问题描述: 按照PyTorch中文教程的[ 在 C++ 中加载 PYTORCH 模型 ]一文,尝试调用 PyTorch模型. 1. 例子来源 在 C++ 中加载 PYTORCH 模型 我是使用Qt新建 ...
- 国旗检测 pytorch yolov3
Flag-Detection 国旗检测 该项目基于PyTorch框架,在一定程度上使用了开源的yolo v3部分代码.(本人并未对原有的yolo v3部分的代码做过多的修饰与更改,原作者的注释得到了充 ...
- 目标检测-基于Pytorch实现Yolov3(1)- 搭建模型
原文地址:https://www.cnblogs.com/jacklu/p/9853599.html 本人前段时间在T厂做了目标检测的项目,对一些目标检测框架也有了一定理解.其中Yolov3速度非常快 ...
最新文章
- 2022-2028年中国热熔胶产业竞争现状及发展规模预测报告
- R算数运算符:+、-、*、/、%%、%/%、^
- Python核心编程学习日记之错误处理
- vs2012 智能提示消失解决办法
- 神策 2021 数据驱动大会丨北京主会场首日直播,拼团早鸟票特惠来袭
- MySQL安装教程图解
- Java高并发之锁优化
- 自适应登陆html5,html5验证自适应
- C++(STL):17---deque之迭代器使用
- Party(HDU-3062)
- php input框圆角样式,CSS如何实现边框圆角
- java 创建类带泛型_java-创建泛型类列表
- 0906--学成在线页面案例
- “软件工程造价师”和“软件造价评估师”有什么区别?
- CentOS7各个版本镜像下载地址
- jsp教师信息管理系统
- Android项目实战(八):列表右侧边栏拼音展示效果
- python矩阵运算算法_Python常用库Numpy进行矩阵运算详解
- asp.net控件,服务器标记的格式不正确问题解决方法
- excel如何在一列文字前统一加上固定文字
热门文章
- IE8 正式版官方下载链接
- 采集本地HTML数据,火车采集器保存为本地word、excel、html、txt文件方法及文件模板_爬虫软件技术与爬虫软件网页数据采集器门户...
- NEO智能合约开发(二)再续不可能的任务
- Unity3D笔记第十五天——Unity2D技术
- ASML大举向中国出口光刻机,或在于忧虑中国光刻机技术取得突破
- MATLAB中plot函数的用法
- js: color-thief在浏览器中拾取图片的主色调
- python中inf_认识python中的inf和nan
- dismiss android,在 dialog.dismiss( ) 上,安卓的窗口甚至泄露了_dialog_开发99编程知识库...
- 八行代码一键照片转漫画